


《1 引言》
1 引言
为提高电视图像质量, 通常进行以下处理:去隔行, 帧频提升, 降噪和图像边缘增强等。在不同的算法类型中, 运动补偿型算法是最高级的算法, 如运动补偿去隔行、运动补偿帧频提升和降噪等。数字视频与数字图像的主要区别在于数字视频信号具有时间维度, 其中包含运动信息。在运动信息能够准确得到的情况下, 运动补偿型算法会比非运动补偿型算法的效果好。在运动补偿算法中, 运动信息的准确度以及获得的难易度是各种运动补偿型算法的核心。运动估计模块通常称为运动估计器。运动估计器的硬件实现及其价格成为各种运动补偿型数字视频处理算法在实际系统中应用的关键。
在数字视频信号降噪和视频格式转换 (去隔行、帧频提升等) 算法中, 基于块运动估计和运动补偿算法得到了广泛应用
在块匹配运动估计过程中, 块匹配检测标准的调用是非常频繁。降低块匹配检测标准的运算复杂度, 将会使整个估计器的运算速度大大降低。因此, 块匹配检测标准必须是计算简单、硬件实现容易的。上面所提的三维递归搜索策略有一个固有的缺点——误差传递性。为了保证运动场的平滑性, 三维递归搜索策略将当前块的邻块运动矢量为其预测值, 并对该值稍加修改形成当前块的待测矢量集合。这样, 在保证运动矢量场一致性的同时, 会导致估计的运动矢量的误差传递。在递归方向上进行该误差传递过程, 使运动估计器不能够快速地对突然出现的运动物体做出反应。特别是对于大面积亮度变化缓慢的图像区域, 由于这个区域内各个块之间的亮度差异较小, 噪声的影响变得很大, 会使在这个区域内检测到的运动矢量场在大小和方向上呈随机分布, 这时如果出现一个运动物体, 运动估计器对运动速度的变化不能做出快速的正确反应。为了减少递归搜索运动估计器的这个缺点的影响, 修改块匹配检测标准, 为匹配检测标准增加一个惩罚系数, 使在大面积亮度变化缓慢的图像区域内检测到的运动矢量均在零矢量附近。这样, 递归搜索运动估计器可对速度的突然变化做出较快的反应。
提出一种改进的加权最小最大误差标准。这种块匹配检测标准计算简单, 硬件实现容易, 运算速度快, 并且所增加的权值能够有助于在递归搜索策略中降低误差传递对运动估计结果的影响。
《2 块匹配运动估计算法原理及块匹配检测标准》
2 块匹配运动估计算法原理及块匹配检测标准
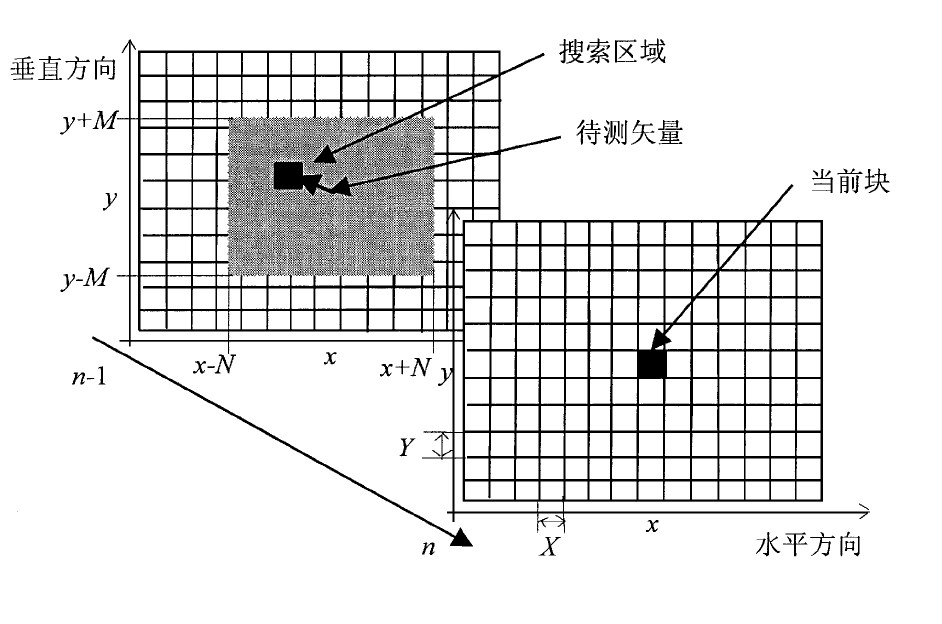
在块匹配运动估计算法中, 当前帧n中一个以X为中心的块B (X) 的位移矢量D (X, n) 通过在一个搜索区域SA (X) 中搜索一个相似块得到。这个搜索区域也以X为中心, 但处于相邻帧中, 如帧n-1。搜索到的相似块的中心相对于X有一个位移矢量D (X, n) 。 为了寻找D (X, n) , 一些待测位移矢量C被一个匹配误差检测函数ε (C, X, n) 所评估, 这个函数量化了两个块之间的相似性。块匹配运动估计算法见图1
定义待测位移矢量C的集合为CSmax, 这个集合包括了前一帧中搜索区域SA (X) 内相对于X的所有可能位移 (均处于图像的像素网格上) :
式中N和M是限制搜索区域SA (X) 的常数。当前帧中一个以X= ( Xx, Xy) 为中心, 大小为X×Y的块B (X ) 所包括像素x = (x, y) 的位置为:
全搜索块匹配运动估计过程得到的位移矢量D (X, n) 是一个具有最小匹配误差检测函数 ε (C, X, n) 值的待测位移矢量C:
一般来说, 具有最小匹配误差的运动矢量D (X, n) 被分配给块B (X) 中的所有像素x。一个待测运动矢量C 的块匹配误差值是当前块和前一帧中移位块的各像素亮度值的函数 (称为成本函数) , 并在块B (X) 上求和。
视频信号为隔行扫描, p=2;若为逐行扫描, p=1。这个成本函数非常直接和易于计算, 但由于这个函数很高的重复计算率将给处理系统带来很大的计算负担。为减少块匹配运动估计算法的计算复杂度以便于硬件实现, 通常从几个方面考虑:
1) 采用一个简单的成本函数作为匹配准则;
2) 对匹配块进行像素二次采样;
3) 采用智能搜索策略, 避免对所有的矢量进行检测。
对匹配块进行像素二次采样, 公认采用2∶1或者4∶1的采样率对运动估计结果的负面影响不大。快速搜索算法包括三步法、四步法、交叉搜索法等等。这些快速算法大大降低了运动估计算法的运算速度, 但是以找到局部最优来代替全搜索算法的全局最优。一种适合于运动补偿数字视频格式转换的运动估计算法是三维递归搜索运动估计算法。在这个算法设计中考虑了硬件实现和运动矢量场的一致性, 运用了递归搜索策略。递归搜索策略在降低运算复杂度的同时, 也带来了递归算法的一个固有缺点——误差传递。
鉴于匹配检测标准函数的高重复计算率, 为提高块匹配运动估计硬件系统的运算速度, 需要简单的匹配检测标准。通常所用的匹配检测标准有




当在频域内计算匹配误差时, CCF是非常方便的。MSE由于其数学上的连续性, 常用于理论分析。在实际中, 由于CCF和MSE有乘法运算, 在硬件上很难实现。文献
PDC是一个很简单的准则, 但是它的效果损失严重, 而且准则中要用到一个经验阈值, 这个阈值对于不同的序列可能有不同的最佳值, 因此现在已很少采用。有些文献提出对上述几个准则的修改方案以降低运算复杂度, 如Reduced bit mean absolute error (RBMAE)
式中权值K= 0.01~0.2是一个经验常数。当运动信息比较明显的时候, 正确位移矢量的EMA远小于其他不正确位移矢量所对应的EMA, 权值K不影响正确位移矢量的选择。当运动信息不明显, 即在大面积亮度变化缓慢的区域, 各个待测运动矢量的EMA比较相近时, 权值K可使靠近的待测位移矢量被选中的可能性更大。这个标准可以使大面积亮度变化缓慢区域的运动矢量场更加有规则。为了进一步降低运算复杂度, 文献
MME与传统的MAE标准相比, 主要优点在于MME对硬件的要求大大降低。例如, 对于一个块大小为8×8、每一个像素有8 b亮度信息的视频信号, MAE和MME匹配的硬件结构见图2。
MAE需要8×8个8 b的绝对差值相加, 需要一个16 b的加法器。然而, MME硬件仅需一个对8 b绝对差值进行比较的8 b比较器, 并使运动矢量选择的比较器从16 b降为8 b。这样, MME降低了运动估计器的硬件面积和复杂度。同时, 由于8 b比较器比16 b比较器和16 b加法器速度快, 提高了整个运动估计器硬件处理速度。
由于MME检测标准对每一对匹配块只取其最大的像素绝对差值, 所以, 它对噪声更加敏感。文献
《图7》
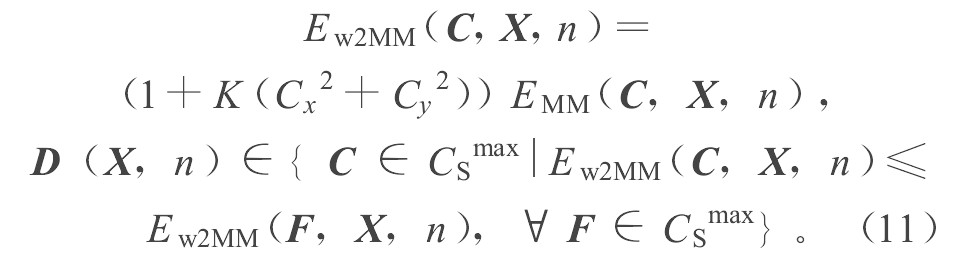
考虑到平方运算的硬件难实现性, 用绝对值代替平方运算得到:
《图8》

模拟结果表明, WMME式 (12) 中的常数K应该适当增大才能达到与w2MME相类似的结果。WMME与WMAE和w2MME相比降低了运算复杂度, 它与MME相比增加了抗噪声的能力。
《3 试验结果》
3 试验结果
试验结果通常用主观评价标准评定, 也有采用客观评价的。
《3.1试验结果主观评价》
3.1试验结果主观评价
主观评价主要根据视觉效果对图像作出判断。
图3 是MSE和MAE标准的效果对比。 图3a和图3b是原始序列中的两帧相邻逐行图像 (大小为352×240) ;图3c和图3d是用全搜索块匹配方法采用不同的匹配标准得到的运动场, 全搜索块匹配算法采用了8×8的匹配块, 运动检测窗口为14×14;图3e和图3f是由第一帧原始图像通过检测到的运动场进行块移位得到的第二场图像。由运动场看出, 两者所检测到运动基本上是一致的, 从图3e和图3f的主观效果图同样可以得出相同的结论。由图3a和图3b可见, 在背景蓝天的白云部分运动场中, 运动矢量的方向和大小呈随机分布。
图4是用WMAE检测得到的运动结果, 从图3d和图4a对比可以看出, 图中白云处的错误运动矢量几乎已经消失。
图5是MME, w2MME和WMME的试验结果主观质量比较。图5a是由MME得到的矢量场, 对比图3d可以看出, MME受噪声的影响大, 图像中有许多较大的方向各异的运动矢量是不正确的。采用w2MME后, 运动场图5c中的错误运动矢量明显减少。但是与图4a比较, 采取相同的K=0.01值, 仍有部分错误的运动矢量, 这与理论分析相符合。采用相同的K值, WMME的效果比w2MME的效果差, 但WMME中适当提高K= 0.2值后, 得到的运动场图5e要比图5c的效果好。对比图5e和图4a可以看出, 两个矢量场很相似, 由此可以得出结论, WMME比WMAE降低了运算复杂度, 而其效果是类似的。所以, 在硬件实现时选择了WMME匹配检测标准。
《3.2试验结果客观评价》
3.2试验结果客观评价
以上给出的实验结果都是用主观评价标准评价的。通常在文献中, 也给出一些客观的评价标准, 如峰值信号噪声比 (PSNR) , 熵 (entropy) 等。PSNR的定义为
这里, MN是帧的大小, F (x, n) 是生成的帧, Fo (x, n) 是用作参考标准的原始帧。图像中的边界在视觉上是非常重要的, 但占图像的很小部分, 其重要性并未在PSNR中反映出来。由于没有更可靠的视觉质量评价标准, PSNR对于评价图像的视觉质量虽然不是一个很好的选择, 但还是得到了很广泛的应用。
全搜索块匹配运动估计方法按六种匹配准则得到的运动场信息生成第二帧图像的客观评价, 即 图3e、图3f、图4b、图5b、图5d、图5f中各图片的PSNR见表1。由表1可以看出, PSNR可以部分地反映图像的主观效果, 但也有偏差。MSE具有最大的RPSN。MAE和MSE的RPSN类似。MME和MSE、MAE相比具有最小的RPSN。这些与主观效果相一致, 是在算法效果和运算的复杂度之间折衷, 是算法复杂度降低的必然结果。为降低算法的复杂度, 图像质量的这点降低是可接受的。从表1可以看出, 加了权值之后的检测标准 (WMAE, w2MME, WMME) 的RPSN与未加权值时相比都有所降低, 这是因为PSNR的计算结果是和MSE相一致的。完全按照MSE检测出来的最佳运动矢量能导致最大的RPSN值, 但大RPSN值不能说明块效应减少。加权值后的检测标准检测的最佳运动矢量会导致很好的视觉效果, 但不一定能够产生大的RPSN值。另外, 从表1中还可以看出, 降低检测标准运算的复杂度对检测结果的负面影响是可接受的。
《图9》

图3 利用MSE和MAE的运动估计结果比较Fig.3 The performance of motion estimation with MSE or MAE
《图10》
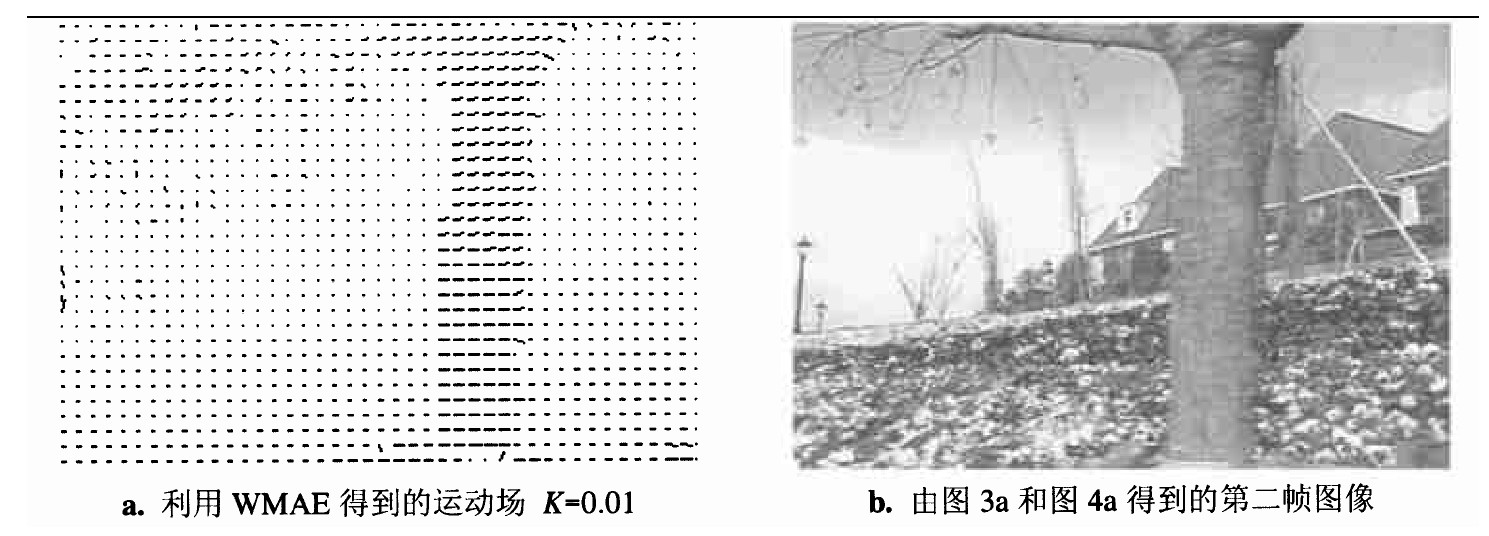
图4 利用WMAE检测到的运动估计结果Fig.4 The performance of motion estimation with WMAE
《图11》
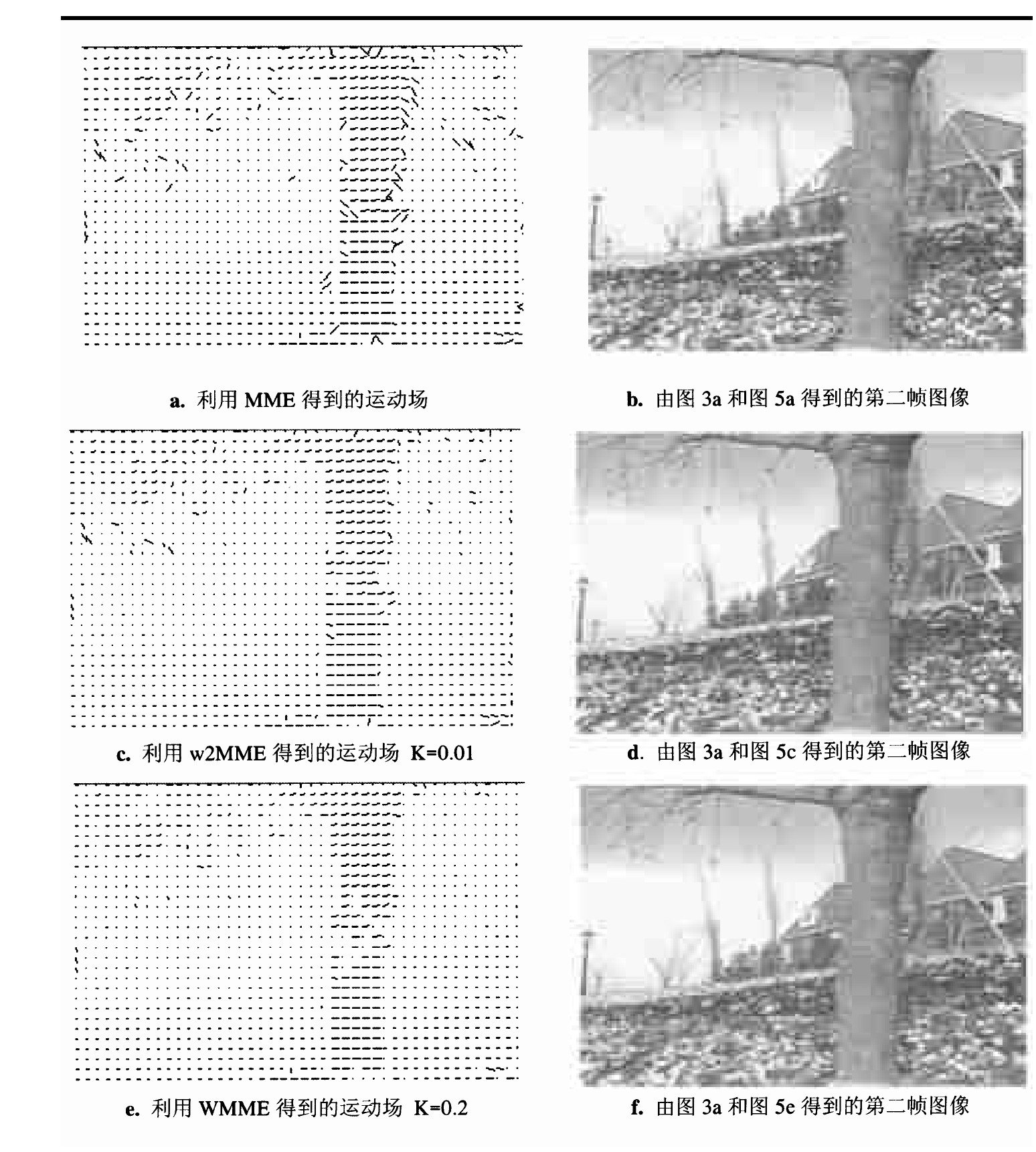
图5 利用MME、w2MME和WMME得到的运动估计结果比较Fig.5 The performance of motion estimation with MME, w2MME or WMME
《4 结论》
4 结论
从匹配检测的效果和硬件实现的难易考虑, 针对三维递归搜索块匹配运动估计算法的固有缺点, 提出了一种新的块匹配检测标准WMME——加权最小最大误差。这个匹配标准与其他匹配标准比较, 能够在类似的匹配效果的情况下比较容易地用硬件实现, 而且能够降低运动估计器芯片的面积, 提高芯片的运算速度。由实验结果可见, 这个标准对运动估计器的输出结果影响不大, 而且能降低噪声影响。在要求进行运动估计的硬件系统中, 加权最小最大误差标准适合与三维递归搜索策略一起应用。











 京公网安备 11010502051620号
京公网安备 11010502051620号




