
2001年 第3卷 第10期
六自由度并联平台特性分析及其电液位置伺服系统的CMAC神经网络控制
1.上海交通大学仪器工程系,上海 200030
2.上海国际机场股份有限公司,上海 201202
3.哈尔滨工业大学机电学院,哈尔滨 150001
下一篇 上一篇
摘要
以六自由度运动平台为研究对象,分析了平台的运动学和动力学问题,采用了CMAC神经网络作为控制器,实现运动轨迹的跟踪。仿真表明所作的运动学、动力学分析是正确的,控制器具有较强的抗负载干扰能力和良好的鲁棒性。
图片
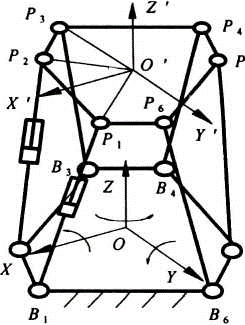
图1
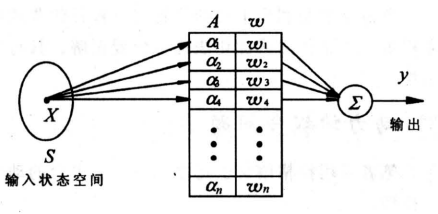
图2
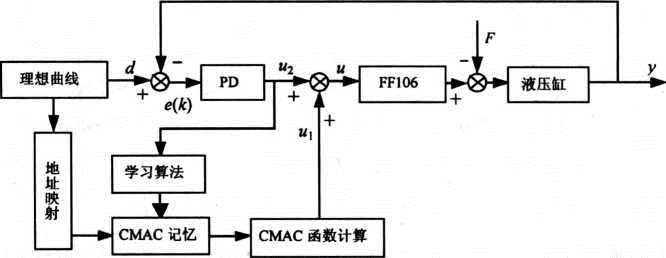
图3

图4
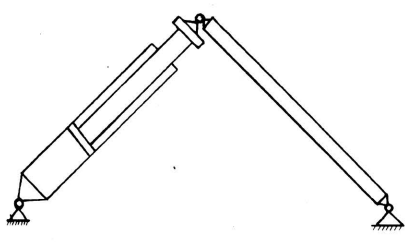
图5
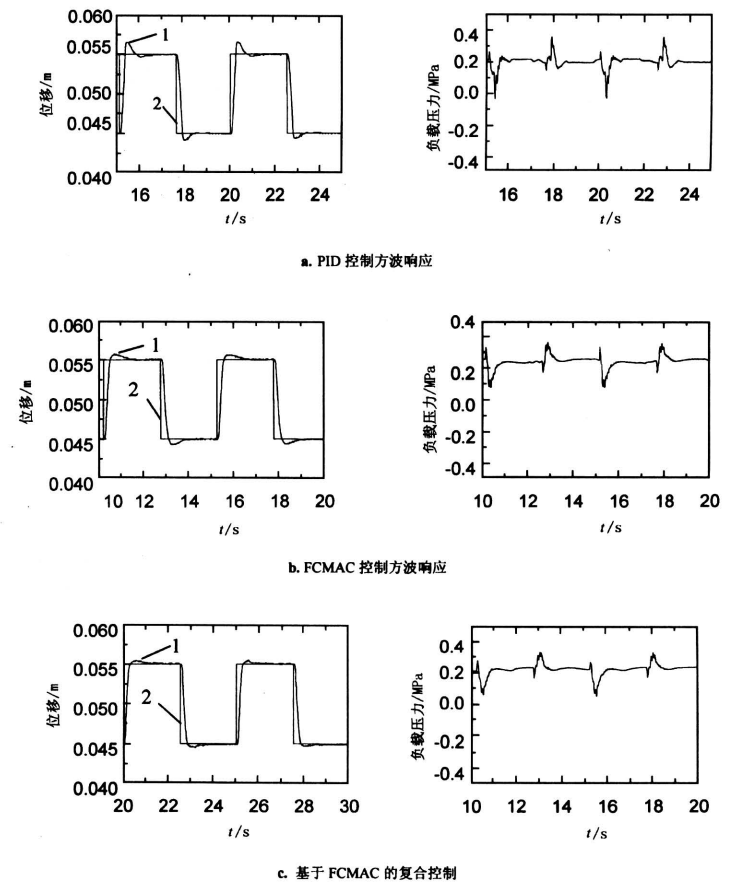
图6
参考文献
[ 1 ] Fichter E F. A stewart platform-based manipulator: General theory and practical construction [ J ]. Int J Robotics Res 1986, (5): 157~181
[ 2 ] Alizade R I, Tagiyev N R. A forward and reverse dis¬placement ananlysis of a 6-DOF in-parallel manipulator [J]. Mechanism & Machine Theory 1994, 29 ( 1): 115~124
[ 3 ] Hunt K. J. Neural networks for control systems-A sur¬vey [J]. Automatica, 1992, 28(6) : 1083 — 1112
[ 4 ] Albus J S. A new approach to manipulator control : The cerebellar model articulation controller (CMAC) [J]. J Dynamic System, Measurement and Control, Trans, ASME, 1975, 97(3): 220~227
[ 5 ] Albus J S. Data storage in the cerebellar model articula¬tion controller (CMAC)[j]. J Dynamic System, Mea¬surement and Control, Trans ASME, 1975, 97(3): 227~233
[ 6 ] Miller W T, Hewes R P, Glanz F H, et al. Real-time dynamic control of an industry manipulator using a neu¬ral- network-based learning controller [ J ]. IEEE Trans on Robotics and Automation, 1990, 6(1) : 1~9
[ 7 ] Miller W T. Sensor-based control of robotic manipula¬tors using a general learning algorithm [ J ]. J of Robotics and Automation, 1987, 3(2) : 157—165











 京公网安备 11010502051620号
京公网安备 11010502051620号




