2005年 第7卷 第4期
基于μ综合鲁棒控制的四轮转向车辆操纵稳定性研究
东南大学机械工程系,南京 210096
下一篇 上一篇
摘要
车辆总是承担不同的载荷,车辆建模亦存在着误差,传统四轮转向控制器难以达到原有的性能指标;针对外界干扰,采用μ综合鲁棒控制方法,构造横摆角速度跟踪综合控制系统设计框架,选取了不同环节的权函数。仿真结果表明,四轮转向车辆控制系统具有良好的动态性能、鲁棒稳定性和鲁棒性能,有效地提高了车辆操纵稳定性和安全性。
图片

图1
图2
图3
图4
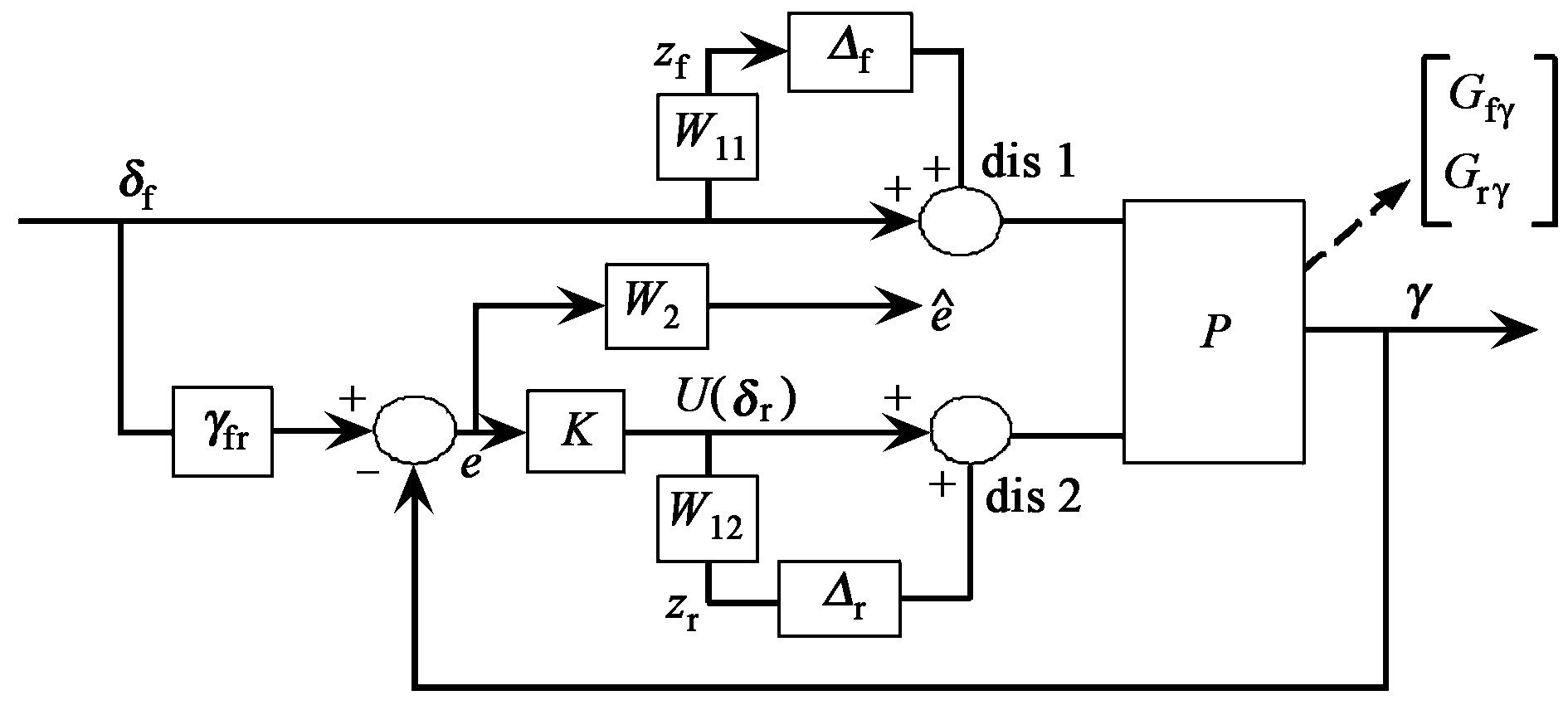
图5

图6

图7

图8
参考文献
[ 1 ] YouSS , ChaiYH .Multi objectivecontrolsynthesis:anapplicationto4WSpassengervehicles[J].Mechatronics, 1999, 9 (9) :363~390
[ 2 ] Packard A, Doyel J. The complex structured singular value [J]. Automatica, 1993, 29: 71~109
[ 3 ] Gao Xiaoming, McVey B D, Tokar R L. Robust controller design of four wheel steering systems using μ synthesis techniques [J]. Proceeding of the 34th IEEE Conference on Decision & Control, 1995, 1 (1) : 875~882
[ 4 ] BalasGJ, DoyleJC , GloverK , etal.μAnalysisandSynthesisToolboxUser’sGuide[M ].TheMathWorks, 2001











 京公网安备 11010502051620号
京公网安备 11010502051620号




