2006年 第8卷 第4期
一个描述机器人团队形成的动态演化模型
1.南京理工大学计算机系,南京 210094
2.北京信息科技大学计算机系,北京 100085
下一篇 上一篇
摘要
目前在多机器人领域,对组织、团队和群体概念比较混乱,团队形成的研究大都停留在定性分析阶段。借鉴Markov过程和进化计算,从协作主体层和能力层研究了机器人团队和组织的区别及团队的形成机制。提出并全面描述了一个机器人团队形成的动态演化模型,目前国内外尚无类似模型。该模型不仅能对机器人团队有一个整体描述,而且能定量描述团队形成时的动态演化过程。
图片
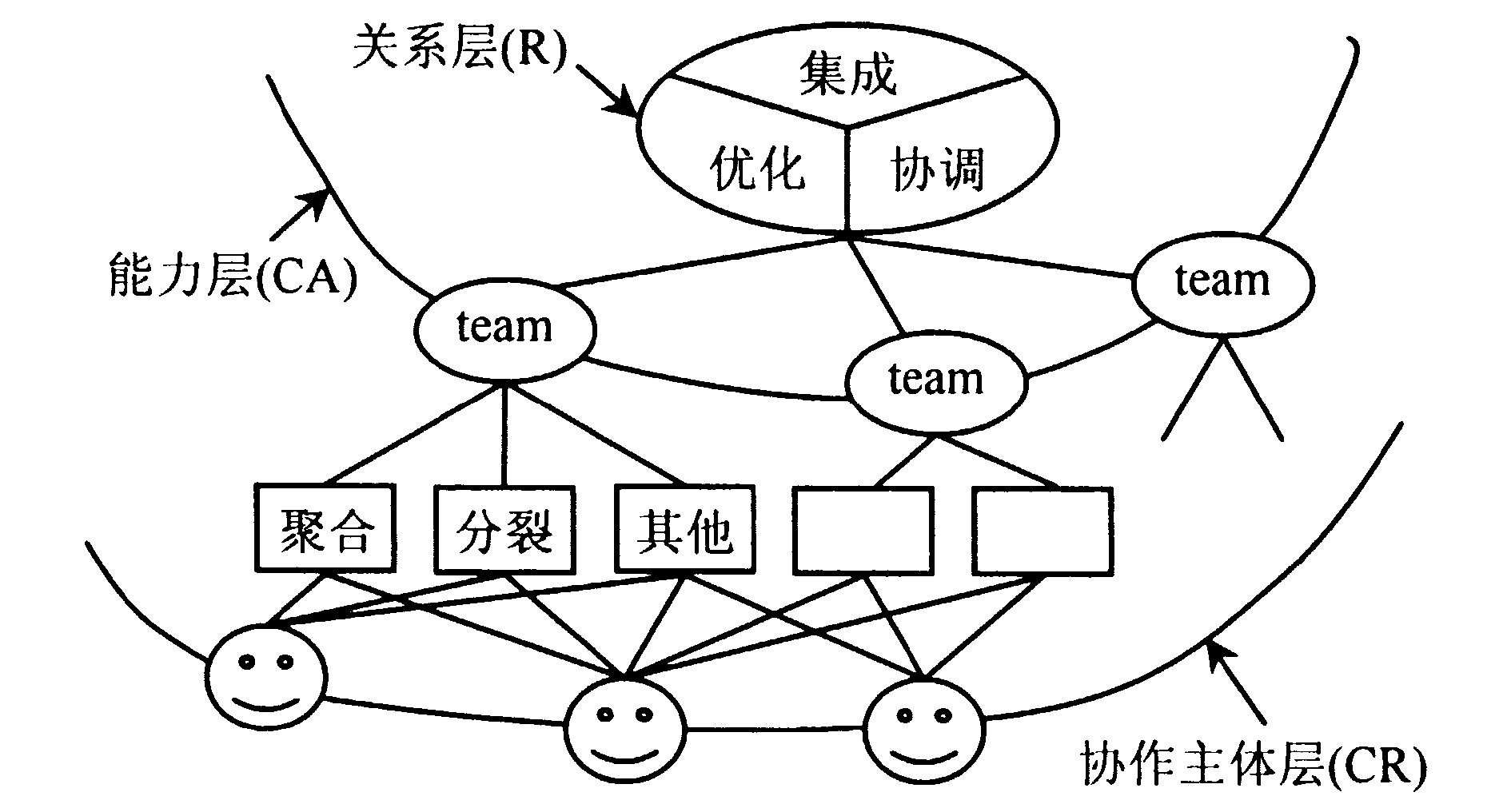
图1
参考文献
[ 1 ] 席裕庚, 陈卫东.机器人向智能化的发展和多移动机器人协作系统[A].自动化综合技术[M].北京:自动化博览编辑部, 2003.149~153 链接1
[ 2 ] Aarme H, Jakubik P, Schonberg T, et al.The concept ofrobot society and its utilization[A].Proceedings of theInternational Workshop on Advanced Robotics[C].Japan:Tsukuba, 1993.29~35
[ 3 ] Shen Weimin, Salemi B.Distributed and dynamic taskreallocation in robot organization[A].Proceedings of the2002 IEEE International Conference on Robotics&Automation[C].Washington DC, 2002.1019~1024
[ 4 ] Dahl T S, Mataric M J, Sukhatme G S.Adaptive spatio-temporal organization in groups of robots[A].Proceedingsof the 2002 IEEE/RSJ International Conference onIntelligent Robotics and Systems[C].EPFL Lausanne, Switzerland, 2002.1044~1049
[ 5 ] 唐振民.智能移动机器人及群体关键技术研究[D].南京:南京理工大学, 2001 链接1
[ 6 ] 张艳, 史美林.描述虚拟企业协作关系动态演变的模型[J], 计算机集成制造系统 (CIMS) , 2003, 9 (11) :966~971 链接1
[ 7 ] 李淑琴, 唐振民, 赵春霞, 杨静宇.一种基于多智能体系统的机器人群组织形式[J].计算机应用与研究, 2004, 21 (1) :61~63 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




