
《1 前言 》
1 前言
空间站是一个密闭的环境,人在其中长时间的生活和工作,以及材料释放出的污染物等,造成了舱室内严重的空气污染,必须提供微量污染净化系统保证舱室内的空气质量[1] 。国际空间站中的催化氧化器是微量污染净化装置的重要组成部分,它由回热换热器、高温催化氧化剂和电加热器组成。铂丝金属制成的加热器将催化床加热到 400 ℃高温并予以保持[2] ,将微量污染气体,如 CH4 , H2 , CO 和 C2H2 等转化为 H2O 和 CO2,最大工作温度是 500 ℃,用于催化剂再生。空间站内的能量是非常宝贵的,有必要严格控制催化氧化器在设定的工作点工作。笔者提出一种新型的自整定模糊控制器,用以控制催化氧化器的工作温度,保证精确控温,最大限度地节约能量。
《2 自整定模糊控制器设计》
2 自整定模糊控制器设计
模糊控制器与传统 PID 控制器具有深远的内在联系,许多文献中都提到模糊控制器在某种意义上是离散的 PID 控制器[3 ,4] ,它们在参数整定方面具有某些共性。笔者在研究 PID 整定技术的基础上,提出一种新的自整定模糊控制器,控制催化氧化装置中的工作温度。图 1 是该模糊控制器的结构图,基本结构用虚线标出,属 PI 型的模糊控制器。
《图 1》

图 1 自整定模糊控制器结构图
Fig.1 Block diagram of proposed self-tuning fuzzy controller
整定的参数包括:偏差 e 的比例因子 Ke 、偏差变化 Δe 的比例因子 Kc 和输出量 Δu 的比例因子 Ku 。具有如下特点:含有 Bang-bang 控制器环节,根据不同的控制系统,在线整定出各比例因子;采用标准模糊输出查寻表;它不是动态整定,一旦参数在线整定后,参数不再变化。 PI 型的模糊控制器的实际输出为[3]

式中 k 是采样次数,Δu(k)是控制输出增量。
《2.1 标准查寻表》
2.1 标准查寻表
采用二分法生成标准模糊查寻表,省略隶属函数、模糊控制规则、模糊化和去模糊过程。由图 1 可知,查寻表的输入为  和
和  ,输出 P 的论域为 [ -1 ,1 ] 。e ,Δe 与 , 的关系为
,输出 P 的论域为 [ -1 ,1 ] 。e ,Δe 与 , 的关系为

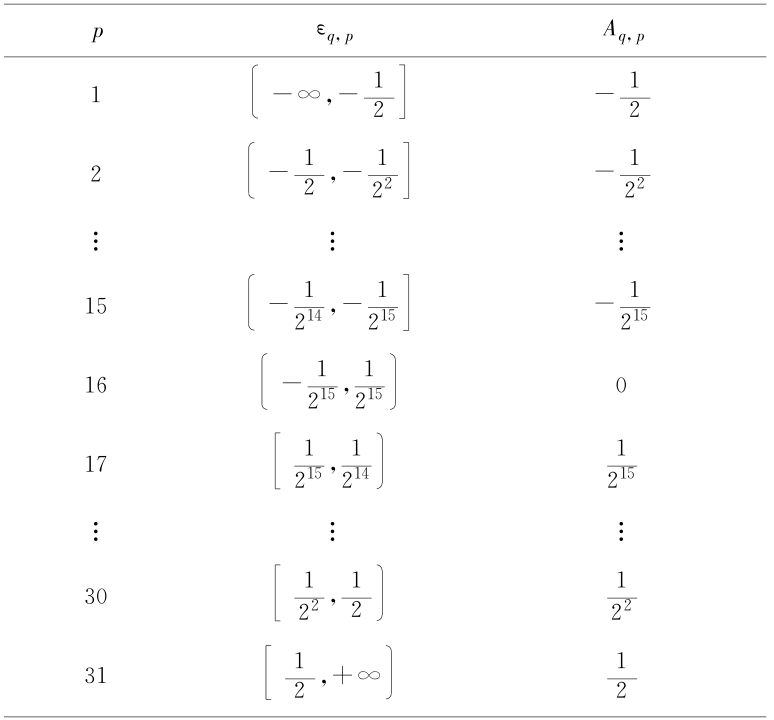
A1 和 A2 是 和 相应的离散值,论域为 [ -1/2 ,1/2 ] 。离散过程如表 1 所示。分析表 1 得 A =(0.5 ~ 1)×  。标准查寻表可以表述为
。标准查寻表可以表述为

式中 Pi ,j 为标准查寻表的单一输出值,i = 1 , 2 ,…,31 ; j = 1 , 2 ,…, 31 。实际控制器的输出增量 Δu 满足

《表 1》
表 1  和
和  的离散关系( q = 1 ,2 ; p = 1 ,2 ,…,31)
的离散关系( q = 1 ,2 ; p = 1 ,2 ,…,31)
Table 1 Discretization relation between and
《2.2 自整定模糊控制的参数整定方法》
2.2 自整定模糊控制的参数整定方法
许多文献都讨论过如何整定比例因子 Ke,Kc 和 Ku [2 ,5 ~ 7] ,但它们都是动态在线整定方法,这种时变的方法给实际的控制带来很大困难,并使系统鲁棒性变差。为解决这个问题,笔者在借鉴 PID 自整定技术的基础上,提出一种新的在线自整定模糊控制器设计思想。它的自整定过程分为两步:
1)整定比例系数 Kp 和积分系数 KI 利用Bang-bang 控制器整定出参数 Kp 和 KI 。将图 1 中的开关转换到 B 处,系统变成一个具有延迟特性的非线性系统,产生极限振荡,这样可以获得被控制系统的临界增益 kc 和临界周期 tc ,进而整定出 Kp 和 KI 。 Ziegler - Nichols 整定方法是较为成熟的整定 PI 和 PID 控制器的方法[8] 。本文将采用该整定方法。对于 PI 控制器:

式中 Ti 是积分常数, Tc 是采样周期。
2)整定模糊控制器的比例因子 Ke,Kc 和 Ku 当整定出 Kp 和 KI 后,将图 1 中的控制开关转换到 F 位置,则控制系统变为 PI 型模糊控制系统。定义图 1 中的模糊控制器输入 - 输出关系满足非线性方程 ,由式(2)至式(4)和关系 A =(0.5 ~ 1)× 得
,由式(2)至式(4)和关系 A =(0.5 ~ 1)× 得

可见它近似于一个非线性的 PI 控制器,令 Kp = KuKc ,KI = KuKe ;当已知 Kp 和 KI 时,令 Ke = 1 ,得到模糊控制器比例因子的整定公式为

Ke,Ku,Kc 其计算稳含在 Bang-bang 控制器框内,并输入模糊控制器(图 1 中未绘出)。
《3 仿真》
3 仿真
《3.1 能量方程》
3.1 能量方程
微量污染净化设备中的催化氧化器可以简化为一个圆柱形结构,如图 2 所示。从内到外依次是加热器、空气环形空间、催化氧化剂和保温层。空气经换热器升温后流入高温催化氧化装置,在环形空间内由电加热器进一步加热到 400 ℃,进入催化剂层内催化氧化,将污染气体转变为 H2O 和 CO2 ,再经过换热器回收热能后进入温湿度控制系统。假设空气温度 T1 是时间和位置的函数,催化氧化剂的温度 T2 以及加热器表面温度 Te 是时间的函数,由集总参数法建立相应部分的能量方程。
《图 2》

图 2 催化装置示意图
Fig.2 Diagrammatic sketch of catalytic oxidizer assembly
《3.2 控制效果比较》
3.2 控制效果比较
采用上述控制方案,依据能量模型和实际的国际空间站工作参数仿真。图 3 至图 6 中曲线  是 Ziegler- Nichols 整定的 PI 控制曲线,曲线 b 是自整定模糊控制器的控制曲线;图 3 是 400 ℃时正常工况下的控制曲线比较图;图 4 是系统发生脉冲干扰时的控制曲线比较图;图 5 是延迟时间变大时的控制曲线比较图;图 6 是延迟时间和加热器功率均变大时的控制曲线比较图。
是 Ziegler- Nichols 整定的 PI 控制曲线,曲线 b 是自整定模糊控制器的控制曲线;图 3 是 400 ℃时正常工况下的控制曲线比较图;图 4 是系统发生脉冲干扰时的控制曲线比较图;图 5 是延迟时间变大时的控制曲线比较图;图 6 是延迟时间和加热器功率均变大时的控制曲线比较图。
从仿真结果可以得到如下结论:
1)自整定模糊控制器能实现较高的控制精度和较小的超调量。
2) Ziegler - Nichols 整定的 PI 控制器与自整定模糊控制器均能对小滞后的催化氧化器实现良好的控温效果,如图 3 、图 4 ;但模糊控制器对大滞后显示出更好的控制效果,如图 5 。
3)自整定模糊控制器对参数变化和负荷变化均具有良好的鲁棒性和适应性,如图 6 。
自整定模糊控制器拓展了 Ziegler - Nichols 整定方法的使用范围。另外,载人航天器的工作条件是恶劣的,而自整定模糊控制器的最大优点是对系统的参数变化不敏感,因此更适于在载人航天器的环境内工作。
《图 3》
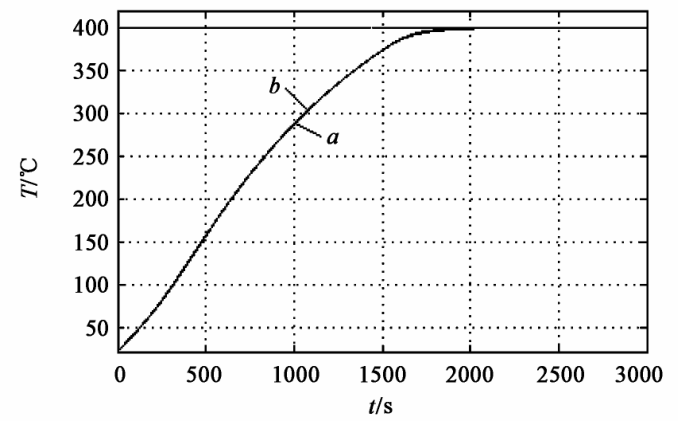
图 3 正常工况时控制效果比较
Fig.3 Response comparisons of system in normal condition
《图 4》
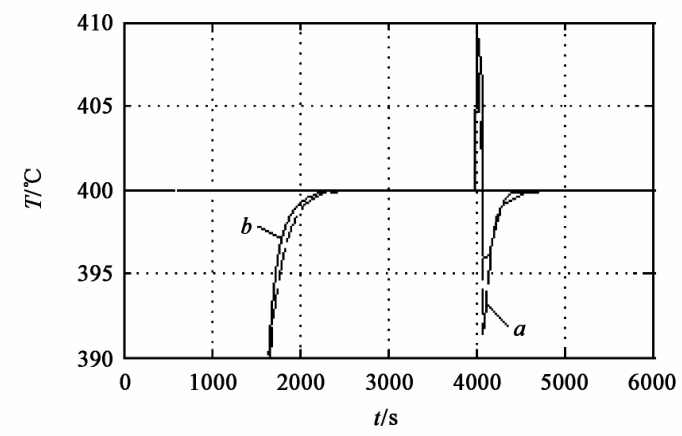
图 4 系统脉冲扰动时控制效果比较
Fig.4 Response comparisons of system with pulse-type disturbance
《图 5》
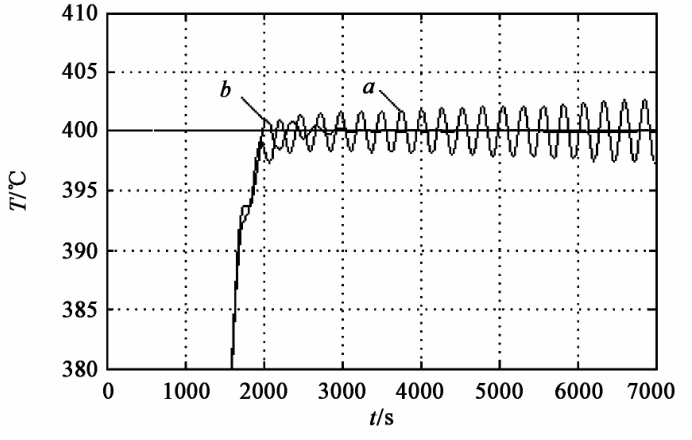
图 5 延迟时间为 45 s 时控制效果比较
Fig.5 Response comparisons of system as dead time is 45 s
《图 6》
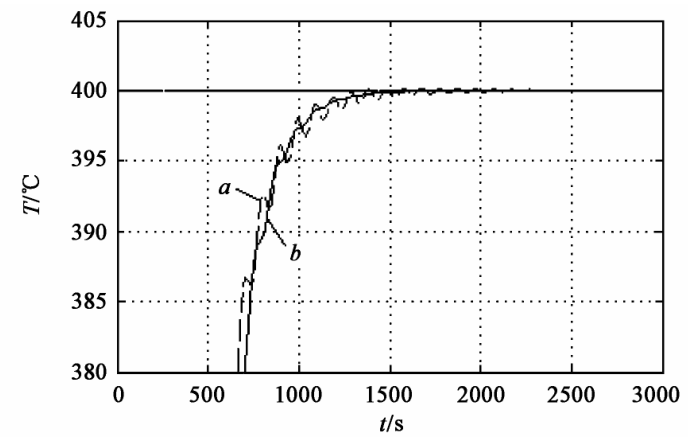
图 6 延迟时间为 20 s 和加热功率为 658.8 W 时控制效果比较
Fig.6 Response comparisons of system as dead time is 20 s and heater power is 658.8 W
《4 结论》
4 结论
笔者提出了一种新型自整定模糊控制器,用于控制载人航天器中催化氧化器的工作温度。它采用 Bang-bang 整定技术获得系统特性,使用笔者提出的整定公式在线地整定出模糊控制器的比例因子,与标准模糊查寻表相结合构成模糊控制器,用于控制系统工作温度。该控制器的最大特点是依据不同的控制过程在线整定出固定的控制参数,方法简单。仿真结果表明该控制器具有良好的控制效果、鲁棒性好、对参数变化不敏感。











 京公网安备 11010502051620号
京公网安备 11010502051620号




