



《1 引言》
1 引言
摩托车不同行驶参数检测受到风速、路面粗糙度、车胎充气情况和油量大小等因素影响, 对其参数的有效检测有利于降低运行成本, 维护交通安全和减小废气排放。检测中, 燃油、润滑油牌号及混合比应符合该车技术规定, 各项指标每次试验应相同。笔者研制的MST-S型摩托车道路试验仪采用AT89S52单片机和非易失RAM-DS1642, 实现在线实时检测功能;利用红外线传感器遥感技术, 结合毫秒脉冲和光电隔离等技术, 进行定距离的时间精确测定, 确保仪器达到国标规定的测量参数精度要求。该仪器可测试最低车速、最高车速、加速性能、滑行试验、刹车性能和耗油量等。
《2 硬件电路》
2 硬件电路
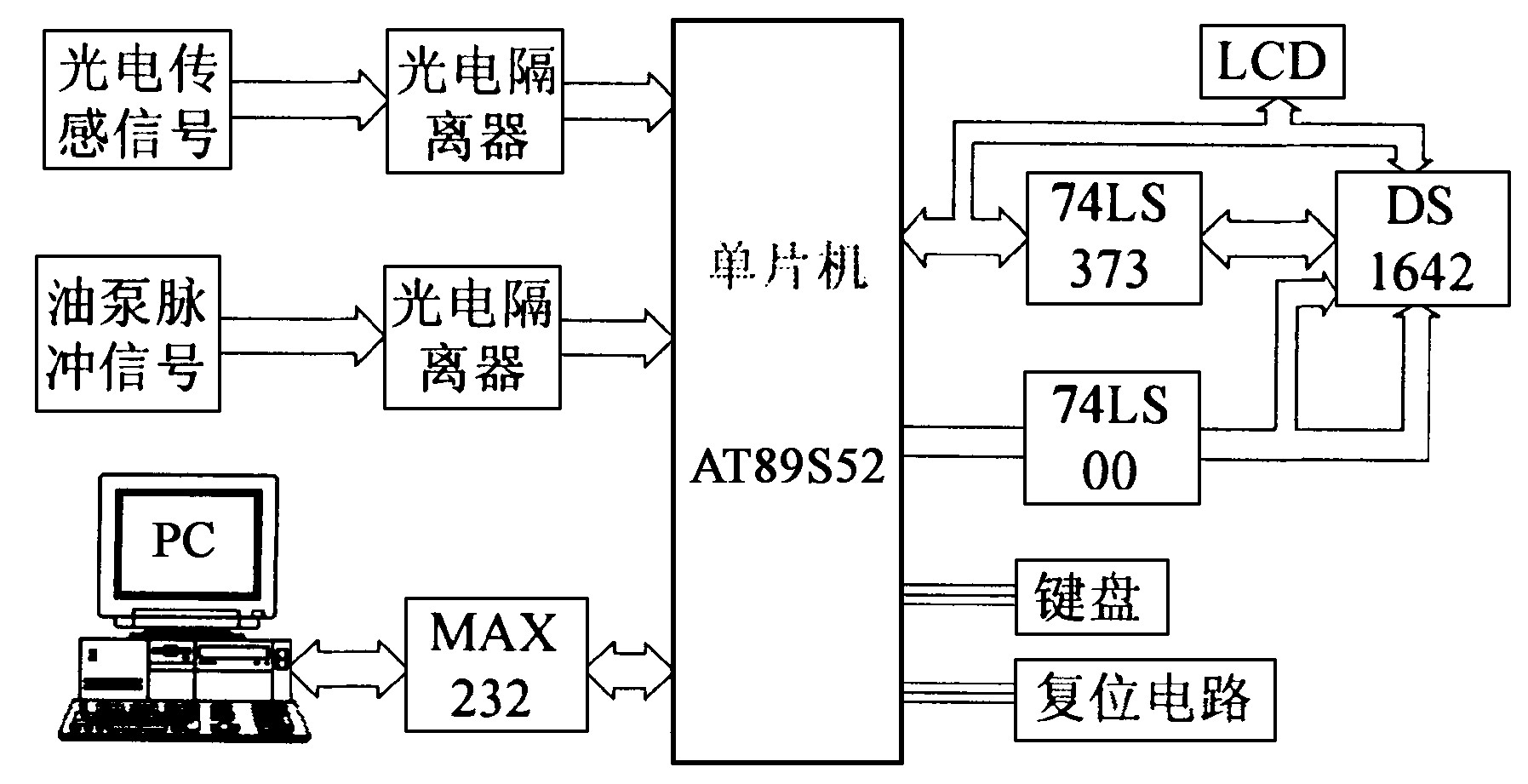
图1为系统硬件接线示意图。它将一个通用8位CPU-AT89S52与一个非易失RAM-DS1642相结合, 使系统成为实时性强、灵活有效的嵌入式微处理器。笔者仅介绍测试中的关键器件AT89S52和DS1642。
《2.1 AT89S52芯片》
2.1 AT89S52芯片
AT89S52芯片是一种低功率、高性能的8位新型CMOS微型控制器
电路采用LCD显示器和非易失性RAM-DS1642, 在线检测采集的数据经AT89S52运算后送到DS1642存储, 然后取出送到LCD显示。P20~P22接显示器和DS1642, 分别作为控制信号和选通信号, 与非门电路74LS00完成读写时序逻辑控制。MAX232为标准串行通信接口电路, AT89S52用串行口TXD经MAX232把DS1642片内数据传输至PC机, PC机信号经MAX232, RXD写入片内, 实现内外数据交换, 即时处理大量数据, 弥补芯片存储量小的缺陷。CPU晶振频率由测量精度确定。P1口接键盘输入信号和测试光电及油泵脉冲传感器信号, 通过74LS14门电路接光电耦合器, 减小外部信号干扰
AT89S52是依据“静态逻辑运算降到0频率”原理设计的, 可支持两种软件并选择功率补偿模式:a. 零功率模式能够使CPU停止而允许RAM、时钟/计数器、串口和中断系统继续工作;b. 掉电运行方式可保存RAM内容且冻结振荡器, 使其他芯片功能消失直至另一中断或硬件复位发生。
《2.2 DS1642芯片》
2.2 DS1642芯片
DS1642是具有实时时钟 (RTC) 和2 kB×8的NV SRAM (如图2) , 非挥发性时间管理RAM可提供非挥发性读写和附加即时时钟功能。其中CE为“芯片选能”,
DS1642可离线将年、月、日、星期、时、分、秒等数据随时设定到时钟寄存器, 保证时钟正确运行。RTC寄存器能自动完成每月天数和闰年校正。时钟寄存器含有双缓冲器, 以避免在时间更新中存取不正确数据, 防止时间漏失。DS1642具有失效电路, 当电压超出变动范围时, 自动禁止选择。
VCC在限制内 (VCC>4.5 V) , DS1642能在读取/写入周期存取数据, 当小于电源失效点 (VPF= 4.25 V) , 内部时钟寄存器和SRAM内数据无法存取, 该功能由IC内部的
当芯片运行后, DS1642内部有一个锂电池, 在没有VCC时 (即断电时) , 仍可维持时钟动作, 以保持正常运行和SRAM内的数据。Dallas公司在DS1642出厂时对其进行过专门校正, 加之受外部干扰甚小, RAM内数据可以保持10年以上不丢失, 可靠性较高。
《3 相关技术》
3 相关技术
《3.1 键盘扫描技术》
3.1 键盘扫描技术
为简捷起见, 仪器面板上设有上翻 (KEY1) 、下翻 (KEY2) 、确认 (KEY0) 和复位 (RESET) 4个键。采用中断与查询结合的方式进行键盘确认:当按下某个键时, 即刻产生中断请求, 查询确认哪个键被按下;按下确认键, 进入选项菜单, 然后按下下翻键, 选择要测量的项目, 最后由确认键确认选择项, 而上翻键的功能可在RAM区快速查看现场检测项目的数据。当完成设定, 按下确认键, LCD显示“START”, 仪器进入等待检测状态。若按下复位键或重新上电则程序从头开始。
程序运行后, 首先检测是否有键被按下, 若有则按确认键后立即进入菜单选项 (如表1) , 表1含有7种待检项目, 可以通过确认键一一查看选择。此时若按下上翻键将菜单上翻;而按确认键则确认选择的检测项目;可采用延时程序 (如延长时间15 ms) 避开键盘抖动;在认可键号前应避开抖动, 形成正确键号, 减小人为干扰
《3.2 光电隔离技术》
3.2 光电隔离技术
利用光电耦合器 (图3) 抵抗外部噪声、电磁波等干扰。其输入电阻为1 kΩ, 干扰内阻为105~106 Ω, 分压后, 传到耦合器输入端的干扰电压很小。
光电耦合器输入端配置发光源, 输出端为受光器, 它与普通晶体管伏安特性相近, 特点是:a. 反向击穿电压小, 约为6 V;当外加电压大于该值时二极管才发光;由于一般干扰噪声的内阻很大而供出能量较小, 形成的电流很微弱, 在电压幅值很高时发生干扰, 由于能量不足而不能驱动耦合器二极管发光, 从而抵抗了干扰。 b. 输入/输出间电容小 (0.5~2 pF) 而绝缘电阻达1011~1013 Ω, 干扰很难反馈到输入系统, 从而把输入/输出完全隔离;开关量输入电路接入光电耦合器后产生隔离效应,
表1 摩托车检测参数及计算公式 Table 1 Detecting parameters and calculate formulas of motorcycle
《表1》
| 序号 | 项目 | 测试区间/m | 计算公式 | 执行标准 |
| 1 | 制动性能 | 车速测试区:2 | 实际初速度v0 = 3.6l/t0 修正制动距离S=S0 (v/v0) 2 制动减速度a=v2/259S | GB/T5382.1-1996 |
| 2 | 最低稳定车速 | 50 | 最低稳定车速vmin=360/ (t1+t2) | GB/T5383-1994 |
| 3 | 最高车速 | 200 | 最低车速v=3.6l/t | GB/T5384-1996 |
| 4 | 起步加速度 | 轻便二轮:100 轻便三轮:200 普通二轮:200 普通三轮:400 | 加速度a=2S/t2 实际初速度v0 = 3.6l/t0 | GB/T5385-1994 |
| 5 | 超越加速性 | 轻便二轮:100 轻便三轮:200 普通二轮:200 普通三轮:400 | 测试区间2 m 加速度 a=2 (S-v0t) t2 滑行减速度 | GB/T5385-1994 |
| 6 | 滑行试验 | 初速区:100 试验区:0-50-100 | b =100/t2 (l/t1-l/ (t2-t1) ) 滑行阻尼系数f=b/9.8 | GB/T5386-1994 |
| 7 | 燃油消耗 | 摩托车:500 轻便摩托:300 | 车速v=72S/ (t1+t2) 百公里油耗: 纯汽油G=50 (G1+G2) /S 混合燃油G=50M (G1+G2) /S (M+1) | GB/T6486-1996 |
使夹杂在输入开关量中的各种干扰脉冲都被挡在输入回路的一侧。
《图3》
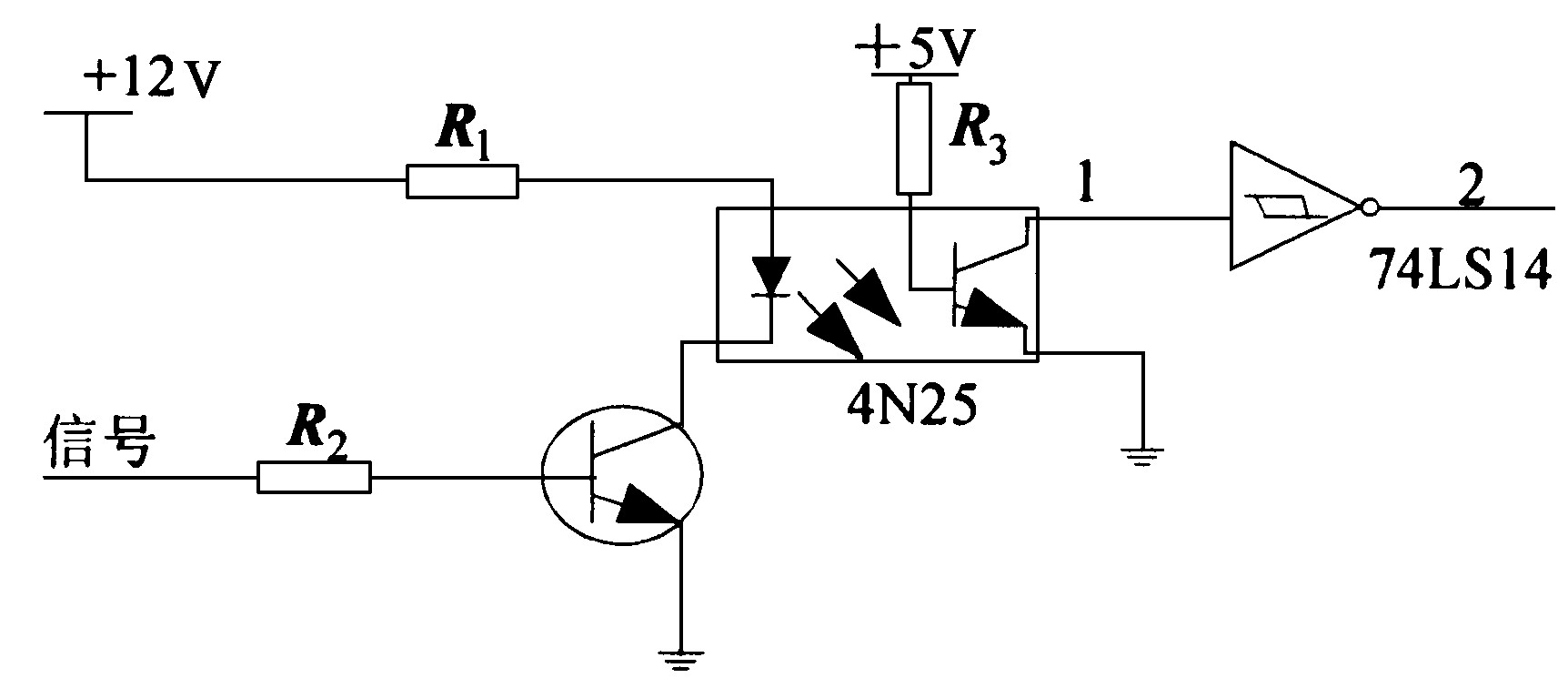
图3 光电耦合器线路图 Fig.3 Photoelectricity coupling circuitry drawing
《4 软件设计》
4 软件设计
《4.1 程序设计》
4.1 程序设计
编程采用C51汇编语言, 注意不要让DS1642时钟数据存储地址和芯片内已用地址发生冲突。在线检测时, 通过光电传感器检测到起始光电信号, 仪器的秒脉冲计时器开始计时, 一旦收到设定距离的停止光电信号, 计时即结束
《4.2 数据处理》
4.2 数据处理
试验过程如无特殊要求, 一般规定2次, 一个往返为1次, 每个往返必须连续进行, 取算术平均值。考虑实际情况, 往返测量值偏差率不超过表2的规定, 否则无效重做。
表2 测量参数允许误差范围 Table 2 Reasonable error scope in measure parameters
《表2》
| 试验项目 | 测试内容 | 偏差率/% |
| 燃油消耗 | 燃油消耗量/ml | 20 |
| 制动距离 | 修正后制动距离/m | 20 |
| 加速性能 | 时间/s | 10 |
| 滑行 | 距离/m | 20 |
经过试验和检测, 最后得到的数据范围如表3, 其中数值修约应符合国标GB8170规定, 具体情况如表4。每项数据 (随机变量) 接近正态分布, 可以用两个基本参数平均值
表3 实际测量参数范围 Table 3 Parameters′ scope of practical measure
《表3》
| 项目 | 实测参数 | 项目 | 实测参数 | |
| 1 | v0 =18.3~32.5 km/h | a = 0.0096~0.096 m/s2 | ||
| t0=0.2~0.4 s | 5 | v0 =18.0~32.0 km/h | ||
| S= 0.5~31.6 m | t0=0.2~0.4 s | |||
| a = 1.5~96.4 m/s2 | a=0.3~3.7 m/s2 | |||
| 2 | vmin <10.1 km/h | 6 | b=0.0~0.6 m/s2 | |
| t1/t2<36.3 | f=0.000~0.065 | |||
| 3 | vmax<180.2 km/h | 7 | v= 30.2~120.5 km/h | |
| t <4.4 s | t1/t2 <36.2 | |||
| 4 | t=14.4~200.1 s | 油耗= (1.00~71.32) /100 L/100 km | ||
表4 修约参数规则 Table 4 Modifiable rules to parameters
《表4》
| 试验项目 | 测试内容 | 修约后位数 |
| 里程表指示较核 | 较核系数/m | 3位小数 |
| 启动性能 | 时间/s | 1位小数 |
| 最低稳定速度 | 速度/km·h-1 | 1位小数 |
| 最高速度 | 速度/km·h-1 | 1位小数 |
| 滑行 | 距离/m | 1位小数 |
| 加速性能 | 时间/s | 1位小数 |
| 燃油消耗 | 耗油率/L·100 km-1 | 2位小数 |
| 制动距离 | 修正后/ m | 2位小数 |
| 噪声 | 噪声级/ db (A) | 整 数 |
《5 结语》
5 结语
笔者论述了摩托车试验仪硬件/软件设计过程, 说明了设计中应注意的问题。在参数检测中利用AT89S52和DS1642芯片的强大功能, 有效处理测试仪采集数据并可显示到LCD上供试车员参考, 保证了数据精度和实时性。测试仪具有与上位机PC通信及存储测试数据等功能。该仪器的面世丰富了摩托车检测行业的技术手段。











 京公网安备 11010502051620号
京公网安备 11010502051620号




