
《1.引言》
1.引言
骑自行车在19世纪第一次出现,这个经典的运动作为交通、娱乐、体育的方式,现在在世界范围内仍然深受超过10亿人的喜爱。骑自行车不仅环保,且对于许多地区短途陆路交通而言,自行车也是最具性价比和时间效率的交通方式。此外,随着近期全球健康意识的增长,自行车运动作为一种对心血管较低影响的活动,深受各个年龄段人群的喜欢。作为一种有效的闭式运动链锻炼方式[1],自行车运动是一种膝关节友好的活动,其广泛用于康复训练,以改善膝关节损伤或手术后膝关节的活动性和稳定性[2]。
深入了解人体和自行车之间复杂的相互作用不仅可以提高自行车竞技的能力,而且还能消除在踩踏过程中对膝关节的损伤。对自行车运动生物力学的研究表明,基于提出的人体模型测量、记录踏板力和腿部运动学参数,下肢关节力矩随踏板曲柄旋转在不同的骑行条件而变化[3,4]。同时还使用表面[5,6]和肌内[7]肌电图(elec-tromyography,EMG)测量了整个曲柄骑行中腿部的相应肌肉活动。膝伸肌在膝关节弯曲过程中所需的不平衡输出力如图1所示[4],其中膝关节力矩是相对于曲柄角度来表示的。股直肌(rectus femoris,RF)和股肌活动的持续时间几乎是腘绳肌的两倍[8]。因此,本研究旨在降低膝关节伸展的能量消耗。
《图1》

图1.膝关节力矩对应于3个运动状态:水平坐、上坡坐和上坡站立, 如参考文献[4]。曲柄角是以顺时针方向(clockwise, CW)从曲柄上止点(top dead center, TDC)为基准测量的。膝关节伸展力矩为正值, 膝关节屈曲力矩为负值。
基于能量智能化操作的被动可穿戴式器械已被广泛应用于各个领域,如散步的支撑系统已被应用以实现膝关节旋转方向和所需的膝力矩[9]。储能用机械弹簧可减少被动膝关节外骨骼运行时股四头肌伸膝所需要的能量[10]。基于线性弹簧[11]存储膝关节屈曲能量设计的伸膝协助(knee-extension-assist,KEA)设备是一款膝-踝-足矫形器(knee-ankle-foot Orthose,KAFO),可协助肌虚弱的人完成站立。无动力踝关节外骨骼机器人弹簧和离合器机构设计[12]可保证佩戴者更能有效地行走。
以降低能源成本、维持原来的路感和提高操控骑行性能为目的,我们曾提出一种基于扭转弹簧存储能量的设计可穿戴式膝关节屈伸膝辅助装置[13]。为解决膝关节大角度运动相容性问题,基于人体膝关节几何学[16]得到的运动学二阶方程,我们设计的外骨骼原型机[15]采用了交叉连杆机构[14]。我们还介绍了一种新颖的三点滚子设计,为扭转弹簧提供了合适的支撑。
在骑自行车时,所有主要腿部肌肉群(如股四头肌、腘绳肌和臀大肌)协作共同推动踏板。RF是最重要的膝伸肌[17],因为此肌肉的主要作用发生在髋关节和膝关节延伸[18,19]的动力阶段。表面肌电信号的时频分析可以通过连续小波变换(continuous wavelet transform,CWT)得到[20]。在重复最大动态膝关节延伸时,EMG平均功率谱频率(mean power spectral frequency,MNF)在收缩时间上的减少与由于局部肌肉疲劳导致输出力降低有关[21]。然而,由于运动时瞬时EMG的MNF减量总是比初始值低5%,在30 min的自行车测力计测试[22]时局部肌肉有显著的疲劳标志。
本文的贡献如下:研究了参与者在一个自行车训练机上以恒定速度和恒定扭矩运动时被动膝关节外骨骼的性能[13];开发了一种车轮加速系统,该系统使用摩擦驱动技术来启动后轮,以达到所需的骑行速度且可自动脱离轮胎表面。由于肌肉活动对表面肌电信号的频谱成分变化的影响尚不明确,因此基于在同一节奏下股四头肌的活动随着骑行功率的增加而增加的假设,进行了两次功率骑行试验。首先对从RF的EMG数据进行时频分析;然后,进行了佩戴和不佩戴外骨骼两种情况下中值功率谱频率(median power spectral frequency,MDF)对比实验。使用扭转弹簧作为无源关节致动器而不需要角度位置传感器,无动力膝关节外骨骼可以在不消耗电能的情况下减少自行车运动时四头肌的活动。
第2部分说明利用扭力弹簧支撑的伸膝力矩的基本概念;第3部分介绍外骨骼设计;第4部分介绍了实验装置和测试实验;第5部分讨论EMG的实验结果;第6部分总结关键结果。
《2.被动骑行支撑》
2.被动骑行支撑
《2.1.膝关节伸展支撑力矩》
2.1.膝关节伸展支撑力矩
图2展示了曲柄和膝关节运动角度范围的自行车腿-踏板图。曲柄角度θC是从踏板曲柄TDC CW方向测量的。膝关节角度θK表示矢状面上腿(大腿)与小腿(胫)之间的方位差。根据骑行生物力学的研究[4],膝关节运动角如图3(a)中的曲柄旋转角度。在曲柄TDC之前,最大屈膝度为105°,曲柄角约为330°。膝关节完全伸展时,膝关节最小角度28°出现在曲柄下止点(bottom dead center,BDC)之前。原来的膝盖力矩(上坡坐)随曲柄角度变化在图3(b)表示,其中膝盖伸展力矩是正的,膝盖屈曲力矩是负的。膝关节伸展力矩的持续时间从曲柄角约为80°经过曲柄TDC 360°到曲柄TDC后100°为半周期。然而,膝关节伸展力矩为主导力矩,最大可达膝关节屈曲时力矩的两倍。
《图2》

图2. 腿-踏板矢状面曲柄和膝关节角度的示意图。
基于膝伸肌和屈肌所需的不平衡的能量设计了被动自行车助力装置,通过储存膝关节弯曲过程中的能量, 并在膝关节伸展过程中将能量释放出来,这个设计最初在参考文献[13]中被我们研究小组提出。考虑到当膝关节角度θK大于起始角θK0时,拐角弹簧刚度kθ激活,支撑膝力矩τKspr随膝关节角度变化如下:

假设不考虑人-机接口损耗,在支撑膝盖力矩的影响下,基于原始膝盖力矩τKorg,腿部肌肉所需的膝关节力矩τKres预测值如下:

通过对55°膝关节起始角进行0.25 N·m扭转刚度的测试实验结果进行分析,支撑膝关节力矩和计算膝关节 力矩分别可以通过方程(1)和(2)获得,并在图3(b)[4] 中用原始膝关节力矩进行表示。当膝关节角度大于起始 角度时,扭力弹簧仅支撑膝关节伸展。
图3(b)中膝关节力矩预测曲线表明,最大膝关节伸展力矩自70 N·m开始减少,最大减小幅值为11 %。膝关节伸展力矩均方根值(root-mean-square,RMS)自32.1 N·m开始减小,最大减小幅值达到14 %,膝关节屈曲力矩RMS自18.8 N·m开始增大,最大增大幅值达到6 %。因此,在扭簧支撑的曲柄骑行过程中膝力矩RMS 自37.2 N·m开始减少,最大减小幅值达到8 %。
《图3》
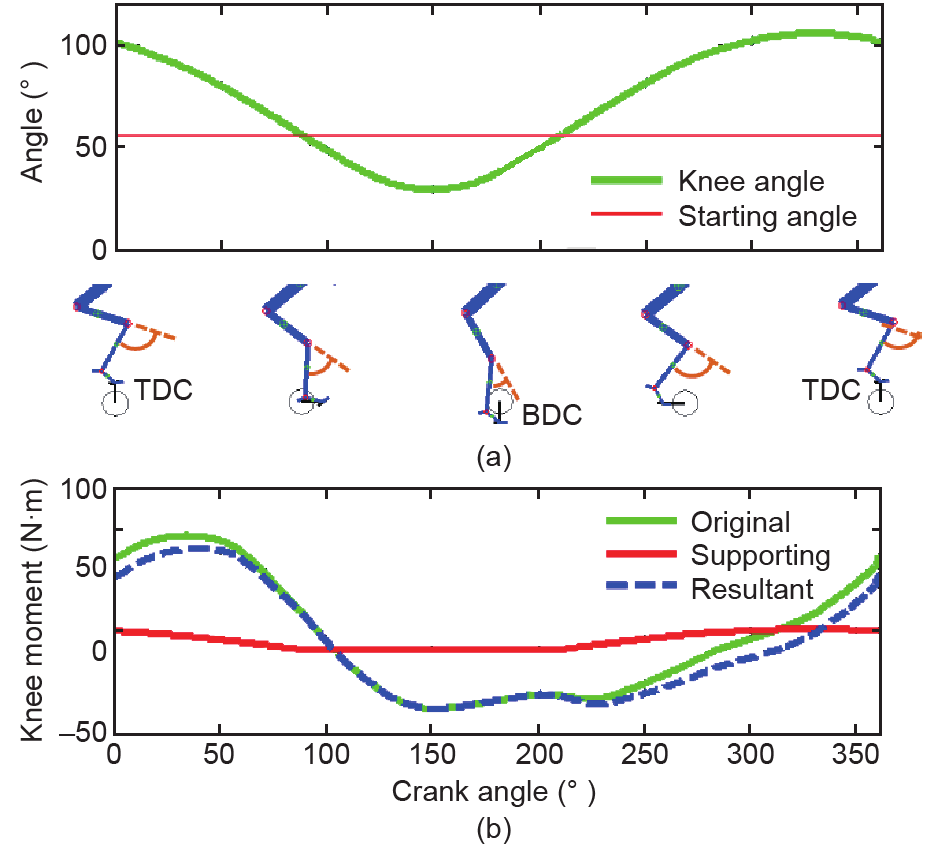
图3.(a)膝盖角度和起始角度;(b)上坡坐姿状态时(原始)膝关节力矩以及支撑产生的膝关节力矩与曲柄角度关系曲线[4]。
《2.2.膝关节动力与机械功》
2.2.膝关节动力与机械功
随着膝关节伸直膝关节角度减小,瞬间膝关节力PK 如公式(3)所示,其中膝关节速度 通过膝关节角度的变化率获得。基于原始和计算膝关节能量,膝关节力 矩τK分别代表原始和计算膝关节力矩。
通过膝关节角度的变化率获得。基于原始和计算膝关节能量,膝关节力 矩τK分别代表原始和计算膝关节力矩。

基于仿真,膝关节功率与曲柄角度关系如图4表示。最大膝关节最大功率自260 W开始降低,最大降低幅值可达到9%。此外,通过扭簧支撑膝关节RMS功率自120 W开始减少,最大减小幅值可达到9%。
为了表明被动骑行过程中能量变化的结果,将计算膝关节力矩表示为膝关节角的函数,并在图5(a)中与初始膝关节力矩进行比较。根据支撑膝关节力矩曲线,扭力弹簧在膝关节屈曲角度为28°~105°时起作用。膝关节伸展过程中,装置从弯曲角度55°开始工作,直到膝关节完全伸直时,力矩达到最大值12.5 N·m。
《图4》
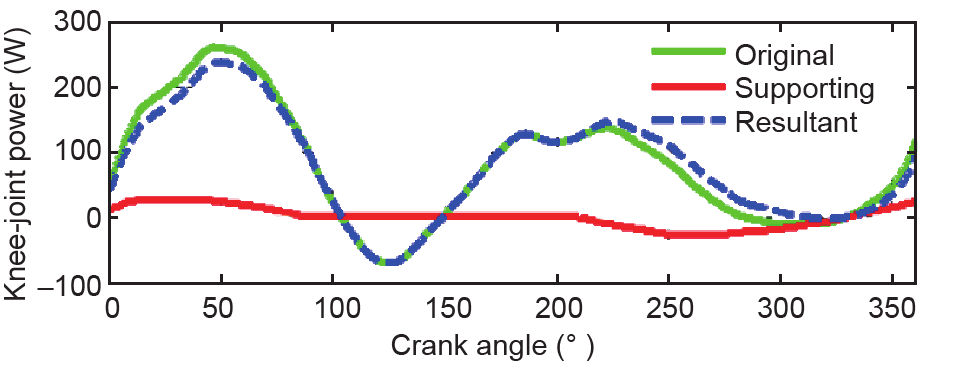
图4. 膝关节能量——原始、支撑和计算能量与曲柄角之间的关系。
《图5》

图5.(a)膝关节力矩与膝关节角度之间的关系;(b)在一个曲柄骑行过程中膝关节伸肌和屈肌原始力矩与计算力矩之间的比较柱状图。
膝盖伸展功Wext在方程(4)中定义为膝关节伸展力 矩相对于膝关节位移dθK的积分,位移量用弧度进行测 量。同样,膝屈曲功Wflx,如公式(5)所示,是膝关节 屈曲力矩的积分。
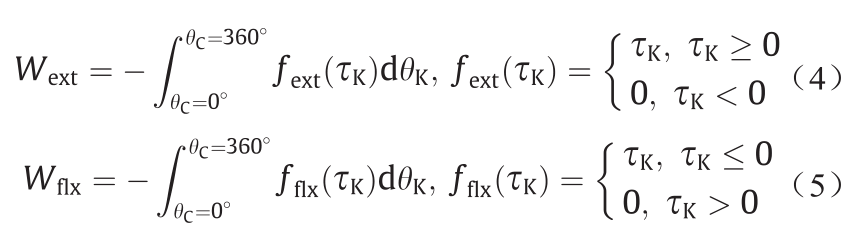
膝关节总功Wtot是膝关节伸展和屈曲工作功的总和:

在整个曲柄骑行中,基于计算膝关节力矩得到的膝关节作用功与初始膝关节力矩在图5(b)以柱状图的形式进行比较。通过使用扭力弹簧辅助,膝关节伸展力矩最大下降幅值达到9 %(49.2 N·m起始),扭力弹簧膝关节屈曲力矩最大增加18 %(24.7 N·m起始)。两组患者的膝关节总力矩在73.9 N·m处保持不变,没有净正的机械功。
《3.无动力膝关节外骨骼原型机》
3.无动力膝关节外骨骼原型机
《3.1.设计要求》
3.1.设计要求
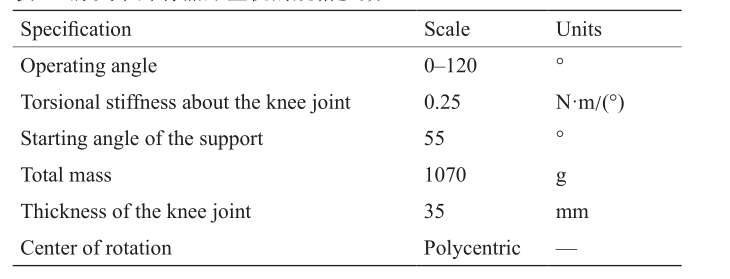
被动骑行辅助降低的骑行能量成本已通过理论模拟证明。在这一节中,我们阐述外骨骼原型机的技术细节,原型机主要用于研究辅助膝盖力矩对腿部肌肉活动影响以及实验验证。表1列出了无动力膝关节外骨骼用于自行车辅助的设计配置。膝关节屈曲操作范围为0°~120°,保证了在蹬骑过程中进行全腿运动。为了最大限度地降低骑行总能量成本,膝关节屈曲能量消耗小于20%[13],我们选择扭转刚度为0.25 N·m,起始角为55°。可穿戴装置的总质量为1070 g。膝关节的横向尺寸被限制为35 mm,以避免阻碍自行车车架。考虑解剖膝关节的运动学相容性,外骨骼的膝关节旋转中心(center of rota-tion,CoR)是多中心的。为了尽可能少地刺激被激活的腿部肌肉,膝部的支撑应该是舒适和牢固。
《表1 》
表1 膝关节外骨骼原型机的规格参数
《3.2.外骨骼原型机》
3.2.外骨骼原型机
外骨骼原型(右腿)在计算机辅助设计软件(com-puter-aided design,CAD)中设计,如图6所示。当使用者佩戴时,上下穿戴模块分别放置在大腿和小腿上。这两个模块通过具有插入扭力弹簧的交叉四杆机构的内侧和外侧膝关节连接。上部和下部可穿戴部件以及紧固带,是从BRG X2K膝部支架(BRG,Inc.)获取的。如图7所示,这些应用于我们的原型中,以简化设计和制造要求(因为基于这些已有的专业知识的成品可更快速地开发舒适、耐用的膝部支架)。双铰链膝关节可用BRIG X2K替代内侧和外侧膝关节。导致外骨骼原型的总质量达到1070 g,与原膝撑490 g相比其质量大幅增加。
《图6》

图6. 无动力外骨骼CAD模型图。
《图7》
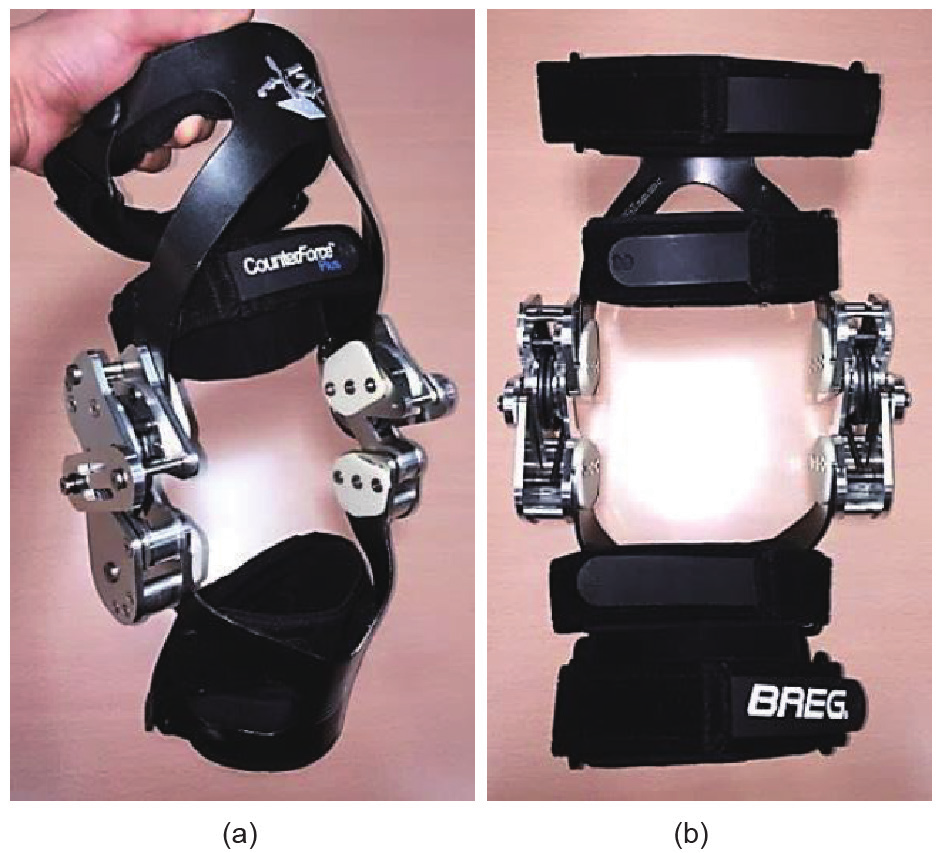
图7.BRG X2K改进的无动力膝外骨骼原型机。(a)侧视图;(b)正面视图。
我们选择了一种交叉四杆机构[14]的构型,作为设计多中心膝关节旋转中心,以提供与解剖膝关节的运动学相容性,从而使膝关节屈曲。图8中绘制了移动胫骨(小腿)旋转中心轨迹的模拟结果。在90°膝关节屈曲时,用虚线表示小腿的模拟位置。在前十字韧带(anterior cruciate ligament,ACL)和后交叉韧带(posterior cruciate ligament,PCL)的交点处,可以得到瞬时旋转中心轨迹,用红色表示。
相同的四杆结构适用于内侧和外侧膝关节。如图9展示了辅助设计软件的渲染模型效果图,双层连杆设计有助于获得所需的结构刚度并为扭转弹簧提供安装空间。在膝关节两侧安装一对相同的扭转刚度弹簧,用于膝关节周围所需的刚度。如图10所示,所有的连杆都由无油树脂轴套支撑在枢轴销上。
《图8》
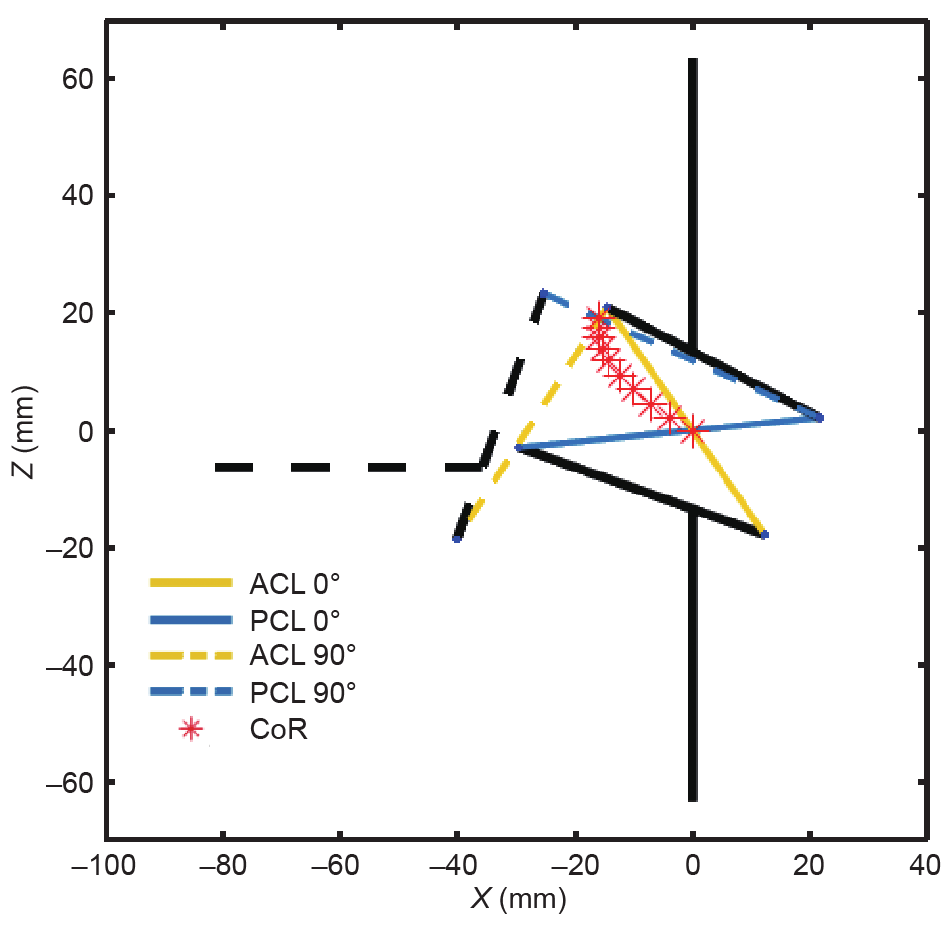
图8. 当小腿从0°移动到90°时,交叉四杆机构的模拟旋转中心轨迹。
《图9》
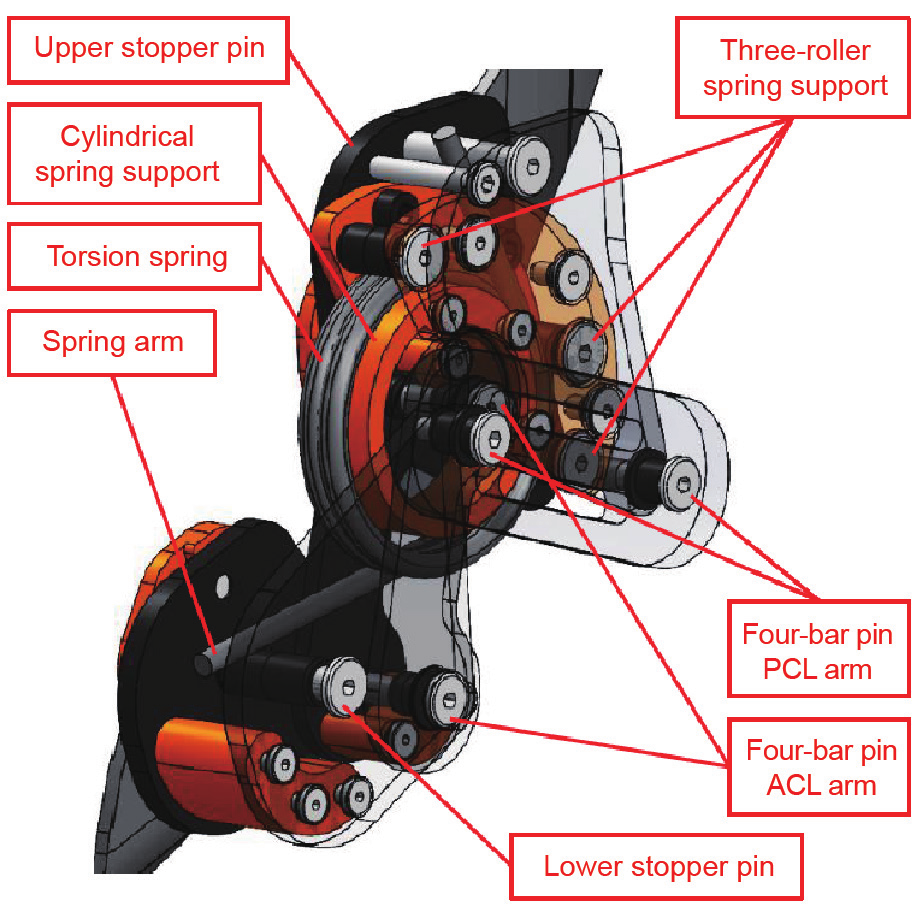
图9. 双层联动结构辅助设计软件渲染效果图。
《图10》

图10. 外置扭簧式外骨骼膝关节。(a)内侧;(b)外侧。
由于扭转弹簧的线圈直径总是在弹簧挠度下减小, 所以共同的支撑设计是基于最小内圈直径的一个完整的圆柱体,此圆柱支撑在弹簧未加载时两者不能完全配合。同时安装扭转弹簧与屈曲角度相关的膝关节旋转中心是一个关键的设计挑战。我们开发了一种在外边缘上的三滚子弹簧支撑设计,不仅为非偏转弹簧提供了合适的装配,而且还适用于偏转范围[13]。图11中的辅助设 计软件展示了在不同关节角度的膝关节模型效果图。
《图11》
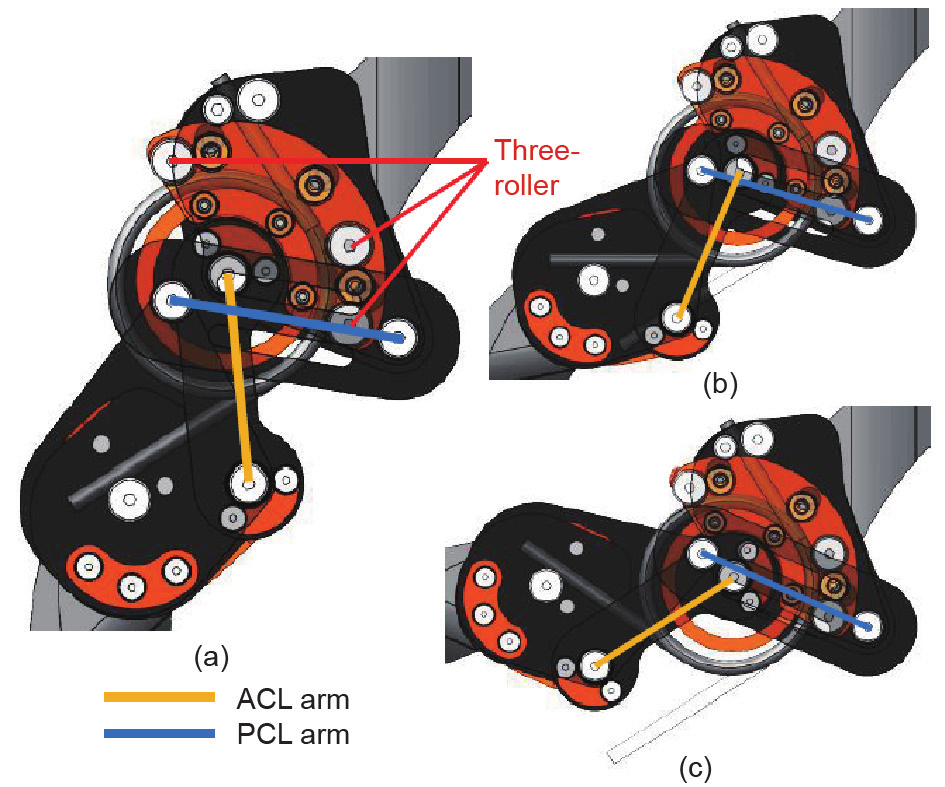
图11.在不同关节角度时膝关节的辅助设计软件模型渲染图。(a)55 弯曲;(b)90°弯曲;(c)120°弯曲。
《4.骑行实验》
4.骑行实验
《4.1.实验环境》
4.1.实验环境
我们建立了一个室内骑行环境,如图12所示,研究自行车主动动力模式和被动骑行支撑模式对股四头肌活动的影响。一辆测试自行车被固定在一个磁性自行车训练器上,上面有一个支撑前轮的攀岩块。实时自行车速度和腿部节奏信息是由自行车速度计采集。表面肌电信号干电极(Logical Product公司产品)被放置在两个参与者的腿上的RF,以1 kHz的采样频率测量肌电信号。
《图12》
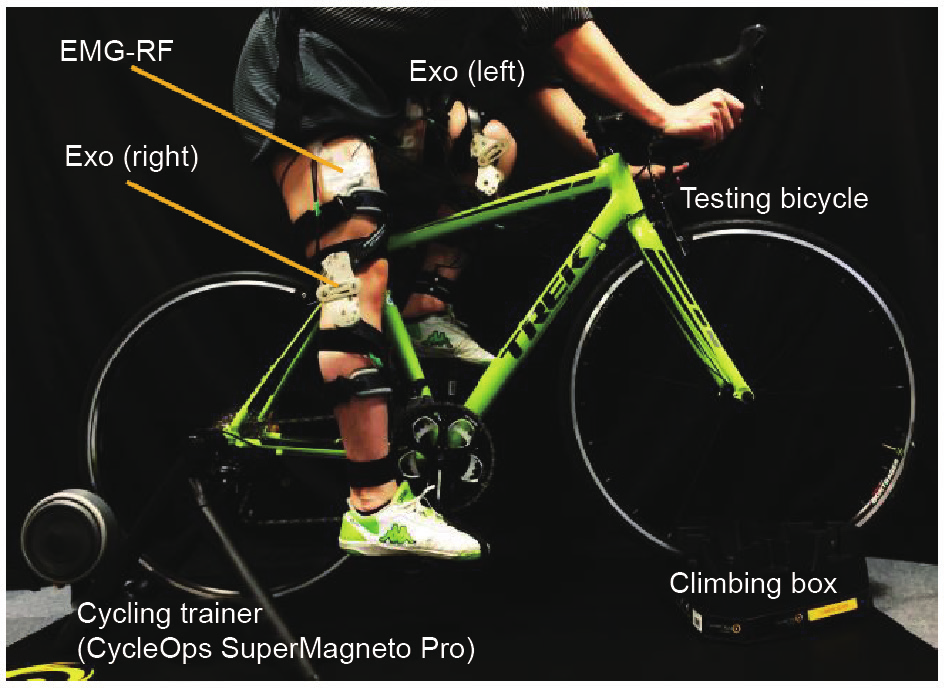
图12. 室内固定骑行环境。EXO:外骨骼。
《4.2.车轮加速系统》
4.2.车轮加速系统
为了让参与者在自行车教练机上以恒定的速度和恒定扭矩条件下进行恒功率的骑行,我们开发了一个车轮加速系统,设定最初旋转的目标速度为30km·h–1,分别以200 W和225 W的功率进行道路模式和间歇训练模式的训练。如图13所示,在摩擦传动机构中使用了一种G32无刷式电机(Turnigy)。当杠杆机构处于中立位置时,操作者和后胎之间设计一个间隙。随着马达加速,反作用转矩驱动着相反方向的杠杆机制。因此,操作者的圆周与后胎的表面接触。随着摩擦越来越大,接触面的反应力将杠杆机制紧紧地压在轮胎上。在达到理想的速度后,当电机停止转动时,杠杆机制自动脱离轮胎,使主体可以开始骑行以保持恒定的速度。
《图13》

图13. 车轮加速系统的摩擦传动机构。
《4.3.实验程序》
4.3.实验程序
由于外骨骼原型机支撑膝盖伸展角度大于55°,扭力弹簧支撑的持续阶段是在曲柄TDC之后的150°到80°的踏板曲柄角之间。作为膝关节伸肌,踏板在曲柄TDC[19]之后从65°到115°时,RF在处于活跃状态。参与者佩戴外骨骼原型机时,将表面肌电信号电极置于RF上比放置在股肌更方便。
在相同的骑行节奏下,假设四头肌的活动随着骑车负荷增加而增加,8名熟悉自行车运动的健康男性参与者进行了两次骑行能量测试,以显示肌肉活动改变对表面肌电信号光谱成分的影响。表2总结了参与者信息。在每一个实验中,参与者在训练器上进行2 min的热身运动,然后进行10 min的休息。在将表面肌电信号电极置于两腿的RF肌肉之上后,参与者进行了3次2 min的骑行试验,每次试验间隔10 min。在30 km·h–1和每分钟57圈的腿部节奏中,骑行试验的顺序如下:225 W骑行功率时,将外骨骼原型机放置在两条腿上(Exo225),225 W骑行功率时,未佩戴外骨骼(Leg225),200 W骑行功率时,未佩戴外骨骼(Leg200)。
《表2 》
表2 骑行实验的参与者信息(8个参与者)

《5.结果和讨论》
5.结果和讨论
《5.1.肌电信号 RMS》
5.1.肌电信号 RMS
在采样频率为1 kHz的情况下,骑行实验获得的表面肌电信号数据由原始肌电信号数据(单位为V)和肌电信号RMS两部分组成。对90 s的恒动力骑行实验进行采集,参与者3的左、右腿的RF相对应的肌电信号RMS数据分别与图14(a)和15(a)的骑行时间相对应。在所有没有外骨骼的骑行实验中,肌电信号RMS显示了整个90 s骑行过程中的肌肉活动。
根据图14(b)和15(b)展示的两腿20 s肌电信号信号的放大图,通过比较未佩戴外骨骼(Leg225和Leg200)的骑行实验的结果,可以观察到骑行实验的肌电信号的减少。与相同的骑行功率(Leg225)时未佩戴外骨骼实验对比,佩戴外骨骼(Exo225)骑行时,RF的肌电信号RMS在两腿上均有减少。左边的结果可明显地看出,RF的肌电信号RMS数据可降低到几乎与未佩戴外骨骼(Leg200)进行200 W功率骑行情况下相同的水平。
《图14》
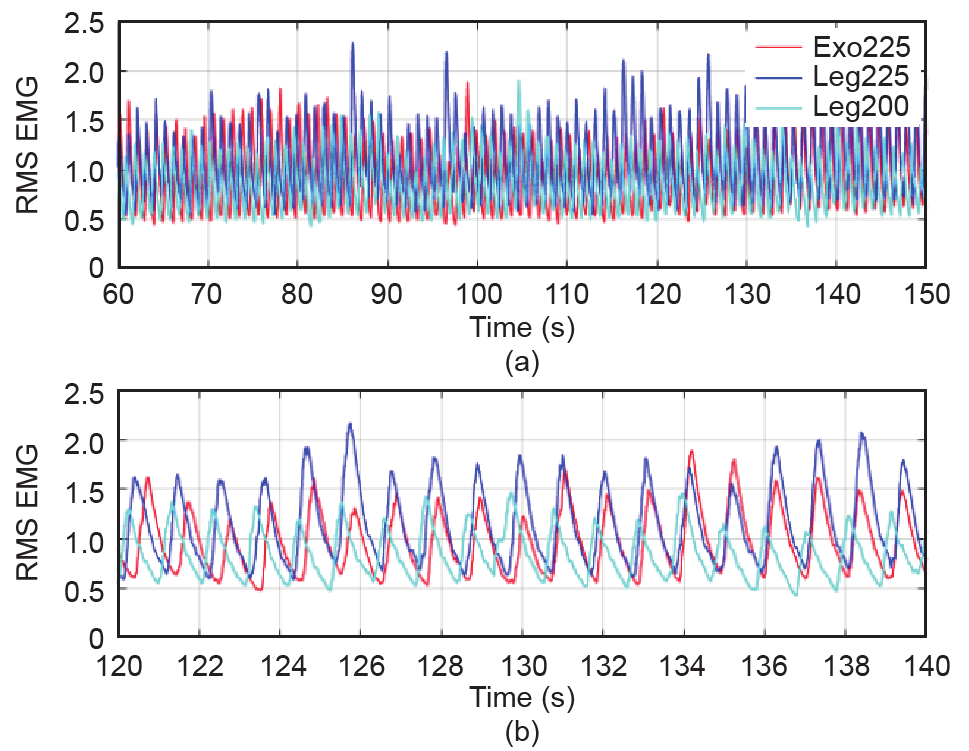
图14.(a)在90 s的间隔内,由参与者3的右腿的RF信号图。(b)20 s间隔放大的图。
《图15》

图15.(a)在90 s的间隔内,由参与者3的右腿的RF信号图。(b)20 s间隔放大的图。
《5.2.肌电信号时域分析》
5.2.肌电信号时域分析
由于肌肉活动的变化对表面肌电信号光谱成分的影响仍然不明确,从骑行测试中获得的每一个单独的RF原始肌电数据都通过一个CWT进行了时间频率的分析。将两腿RF肌肉的小波系数相结合,以参与者3为例,如图16(a)所示,展示了参与者3(Exo225)的时间频率图。瞬时肌电信号瞬时功率谱频率以及线性回归线是根据骑行时间绘制的。在与参考文献[22]的结果一致的情况下,在我们的测试中没有明显的局部肌肉疲劳的迹象,因为在90 s的骑行周期中,肌电信号瞬时功率谱频率的衰减小于其初始值的5%。利用相同的数据结果,将时间频率图扩大到图16(b)的10 s区间。从两腿的RF获得的高密度小波系数可以观察到大约每秒两次,对应于每分钟57圈的骑行节奏。
《图16》
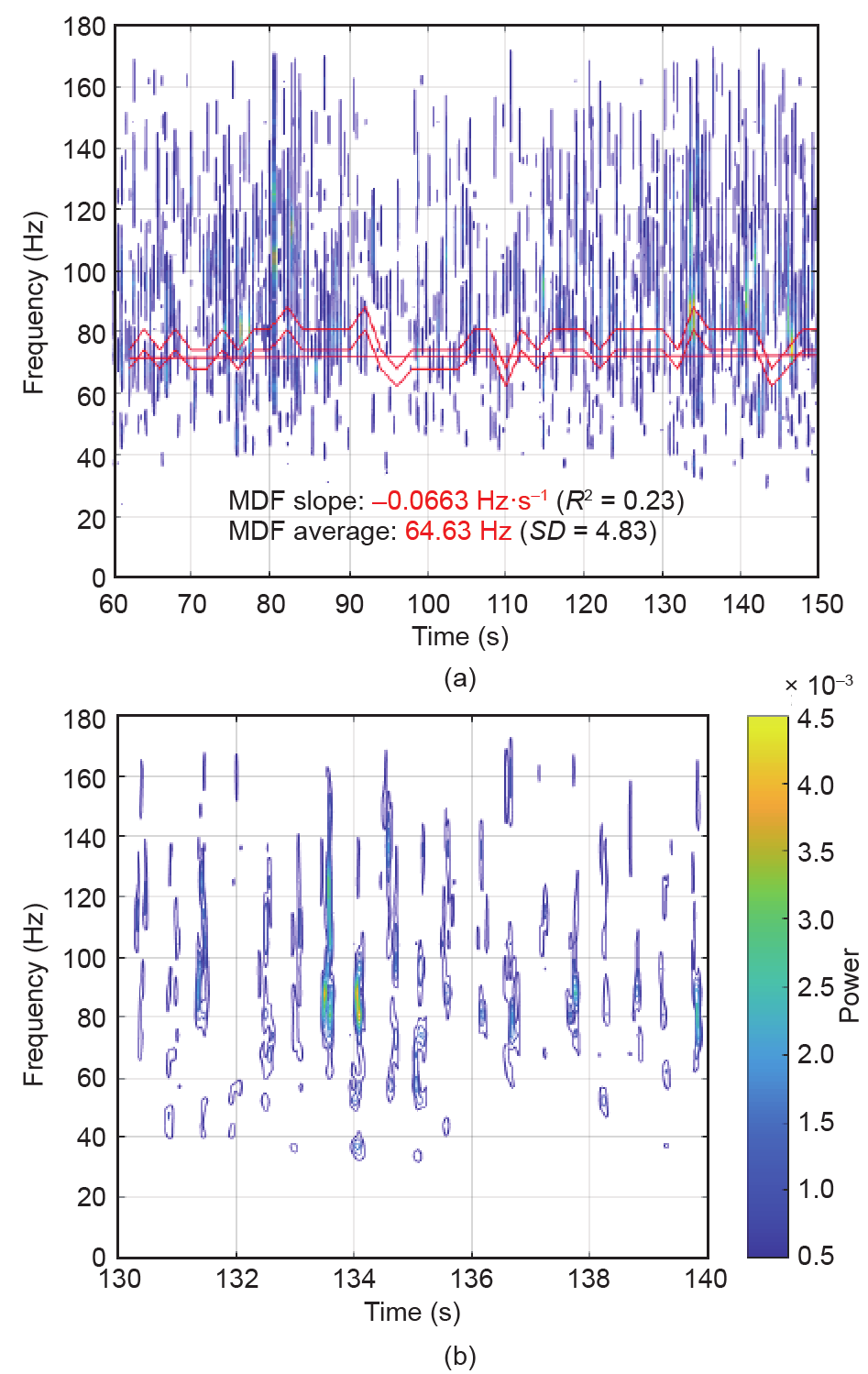
图16.(a)从225 W的外骨骼骑行中获得的参与者3的RF肌电信号的时间频率图。(b)10 s间隔的放大图。
图17比较了所有8个参与者的平均肌电信号瞬时功率谱频率值,3种骑行状态分别是:225 W佩戴外骨骼(Exo225)、225 W未佩戴外骨骼(Leg225)和200 W未佩戴外骨骼(Leg220)。在对每一个参与者的未佩戴外骨骼的骑行试验结果进行比较时,200 W未佩戴外骨骼(Leg200)的骑行试验可以得到一个更低的肌电信号瞬时功率谱频率值。在比较相同骑行功率225 W(Exo225和Leg225)的试验时,在所有8个参与者的骑行中,Exo225状态时可得到更低的肌电信号瞬时功率谱频率值。
《图17》
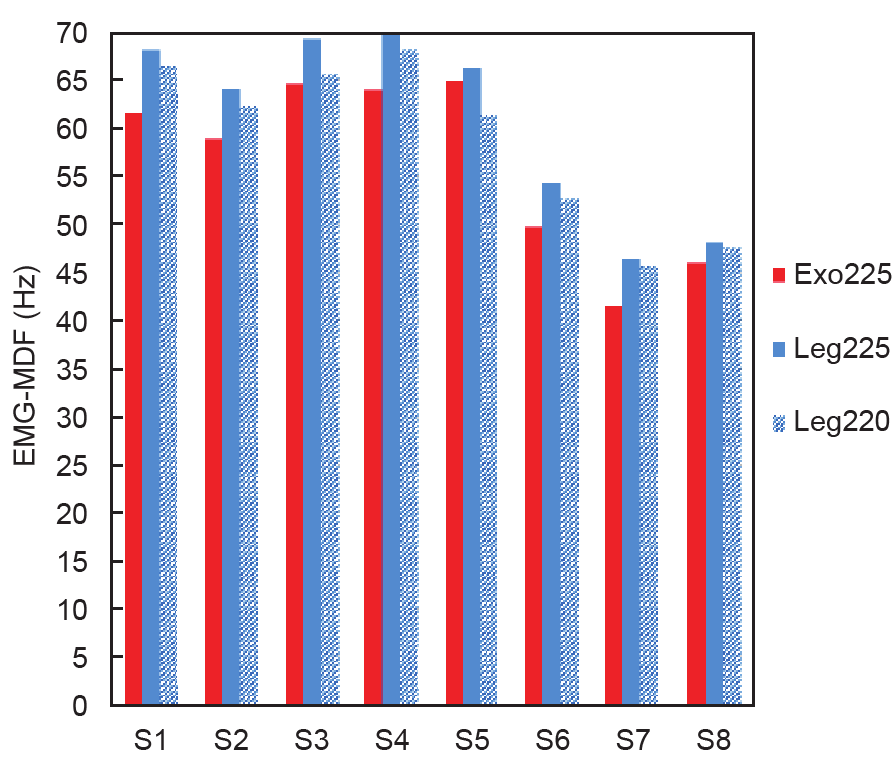
图17. 8位参与者(S1~S8)的90 s的RF肌电信号瞬时功率谱频率平均值。
《6.结论和未来工作》
6.结论和未来工作
利用膝盖伸肌和屈肌在骑车过程中所需要的不平衡的肌张力,我们提出了一个被动的骑行支撑概念,它可以从膝盖弯曲处储存能量,并释放它来支撑膝关节伸展。我们进行了实验验证,使用恒定的能量骑行,通过在8个健康男性参与者的双腿上穿戴外骨骼。简要记录了膝关节伸肌的表面肌电信号,以确定股四头肌活动的减少。随着运动强度的增加,骑自行车的平均时间增加了。这种观察可以作为一种替代方法来比较其他动态运动活动中肌肉活动的水平。在相同的骑行动力下,根据肌电信号瞬时功率谱频率平均值的减少,RF肌肉活动减少了。在没有外部能量来源的情况下,改变四头肌和肌腱的不平衡输出力的能力可以应用于骑行增强和康复应用。
从这个完全被动的可穿戴支撑概念发展而来,我们的外骨骼原型不消耗电能,也不提供净正的机械工作。由于人机接口的损耗,在实践中,肌肉所做的整体机械工作可能会增加。四头肌活动的减少仅仅是这个初步验证所证明的一个优势。为了更好地了解人类的生理机能,必须研究被动骑行支撑对其他肌肉群活动的影响。由于系带的位置,在这项研究中对腿筋肌活动的研究是有限的。在未来的工作中,引入氧气消耗或代谢能量的影响效应对研究具有重要意义。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Ronnapee Chaichaowarat, Jun Kinugawa, and Kazuhi- ro Kosuge declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




