《1. 引言》
1. 引言
动态、大范围空间测量需要一种精密且快速的测距方法[1,2]。传统的距离测量方法,如外差或零差干涉,是通过累计连续波长激光的干涉相位来实现高精度的距离或长度测量[3],这类方法可以被应用于引力波的检测[4]。但是,这种单波长干涉仪的非模糊距离值仅为波长的一半,干涉相位的累计必须是连续的,以避免测量中断。相比较而言,雷达利用光脉冲或射频调制光波测距(LIDAR)则允许光路中断,它具有很大的非模糊距离,但是测距分辨率通常要低于数十微米。光频梳(OFC)的诞生作为一种新型光源,使得测距和其他计量领域获得了革命性的进展[5–7]。一台稳定的光频梳提供许多频域上等间隔分布的窄线宽光学纵模,可以充当相干的系列连续激光光源。此外,光频梳高达百兆赫兹甚至更高的重复频率(简称为重频)还能实现快速测量。
近些年出现了许多基于光频梳的测距系统,如采用光学互相关技术的飞行时间(TOF)法[8];光频梳不同纵模之间做拍产生重频高次谐波[9–11]或利用参考全锁定光梳上的多台连续光进行协同测量[12,13]的合成波干涉法;以及利用干涉光谱相频斜率信息的光谱干涉法[14–16]。这些基于单光梳的测距方法系统结构相对简单,并达到了一定的精度。然而,这些方法并没有充分利用光频梳的纵模,因为通常很难分辨出相邻间隔仅在兆赫兹到吉赫兹的纵模。也正因如此,这些基于单光梳的测距方法没有充分结合光频梳光谱分辨率高、脉冲速率快、非模糊范围大的优点。双光梳测距(DCR)系统则解决了这个问题,它利用两台具有微小重频差的光频梳,通过光梳间梳齿对梳齿的原理产生多外差光谱和时间可分辨的干涉信号(IGM)[17]。换言之,双光梳测距系统利用了大约104根窄线宽光谱纵模进行协同测距。这种基于双光梳的原理在高精度、高速率、大模糊范围方面提供了独一无二的综合性能,并在绝对距离测量方面展开了许多应用研究[18–34]。尽管本文聚焦于双光梳在测距方面的应用,但是其基本原理技术已被广泛应用于光谱测量[35–49]、长光纤色散分析[50]、椭偏光谱[51]、物质特性描述[52]、高光谱成像[53–55]、显微成像[56,57]、振动测量[32]以及压力传感[58]等。这些应用突出体现了双光梳系统多功能的特点,基于相同的双光梳基本结构,并面临着类似的技术挑战[46–49,59–64]。
本文结构组织如下:第二部分介绍基于飞行时间法的双光梳测距系统,包括系统原理和参数优化;为了达到更高的精度,第三部分介绍合成波干涉法(SWI)和 载波干涉法(CWI)在双光梳测距系统中的应用,该部分讨论不涉及相位噪声和强度噪声,但实际的双光梳测距系统要应对有限的线宽、光梳频率漂移和强度波动等问题;第四部分讨论了这些噪声源和实现低噪声双光梳测距系统的对应方法;第五部分通过归纳现有进展和未来挑战做了总结。
《2. 基于飞行时间法的双光梳测距》
2. 基于飞行时间法的双光梳测距
《2.1. 干涉信号的时域频域形式》
2.1. 干涉信号的时域频域形式
作为宽带相干光源的光频梳包含了一系列离散的光学纵模。序号为n的纵模可以表示为重频(fr)和偏频(fo)的形式,即:f(n) = nfr + fo [5,6]。双光梳系统使用两台具有微小重频差的光梳,这在时域上被称为线性光采样,在频域上被称为多外差光谱。
图1是双光梳测距系统的简化原理图。来自信号光(Comb 1,重频为fr1,重复时间为Tr1)的脉冲经过迈克尔孙干涉仪,经测量镜(M)和参考镜(R)反射产生两列分离的子脉冲。接着,本振(LO)光(Comb 2,重频为fr2,重复时间为Tr2)与信号光发生干涉,两台光梳之间具有微小的重频差:Δfr = fr1 − fr2。干涉光经过一个带宽为Δνcomb的光学带通滤波器后由探测器接收。探测到的信号经过一个低通滤波器后由采集卡采集并计算处理。干涉信号可以描述为周期包络乘以载波信号,其原理可以从时域和频域两个角度解释。
《图1》

图1. 双光梳测距系统简化原理图。来自信号光(Comb 1)的脉冲序 列经过一个迈克尔孙干涉仪然后与本振光(Comb 2)合光。根据双 光梳参数配置,采用可调光学滤波器用来满足信号的奈奎斯特采样条 件。采样时钟通常与fr2相等。BS:分光镜;DBPF:光学带通滤光器; PD:光电探测器;LPF:低通滤波器;Tupdate:周期时间;IR:参考干 涉信号;IM:测量干涉信号;∆t:待测时延;ADC:模数转换器。
时域上的双光梳测距系统原理如图2所示。两列时延为Δτ的信号光脉冲序列经本振光线性采样,采样步长为:

《图2》

图2. 双光梳测距系统的时域原理描述。信号光脉冲和本振光脉冲具有不同重复频率,它们之间的时间间隔以∆T为步长增加,从而将待测时延Δτ 放大为Δt。
从而产生两列周期IGM(IR和IM),周期为Tupdate =m·Tr1 = 1/∆fr,其中m = fr1/∆fr,代表了每个周期时间包含的信号光脉冲数量。奈奎斯特采样定理需要光梳带宽满足条件:Δνcomb<1(2∆T)。而待测时延Δτ则被放大为Δt =m·Δτ,Δt由参考、测量干涉信号的拟合包络顶点确定[19,65]。待测距离(DTOF)可以通过该飞行时间得到:

式中,υ代表光脉冲传播速率。
在频域上,我们把双光梳测距系统看作是由大量平行的连续激光构成的多外差干涉仪。其输出结果是一个射频梳,如图3所示。其强度和相位与两个梳的电场的乘积。为了确保光频梳与射频梳之间的一一映射关系,需要满足Δνcomb< m fr2/2,m也代表每个射频周期中本振光贡献的纵模数量。因此经过变换,双光梳系统需要严格满足下列条件:

《图3》
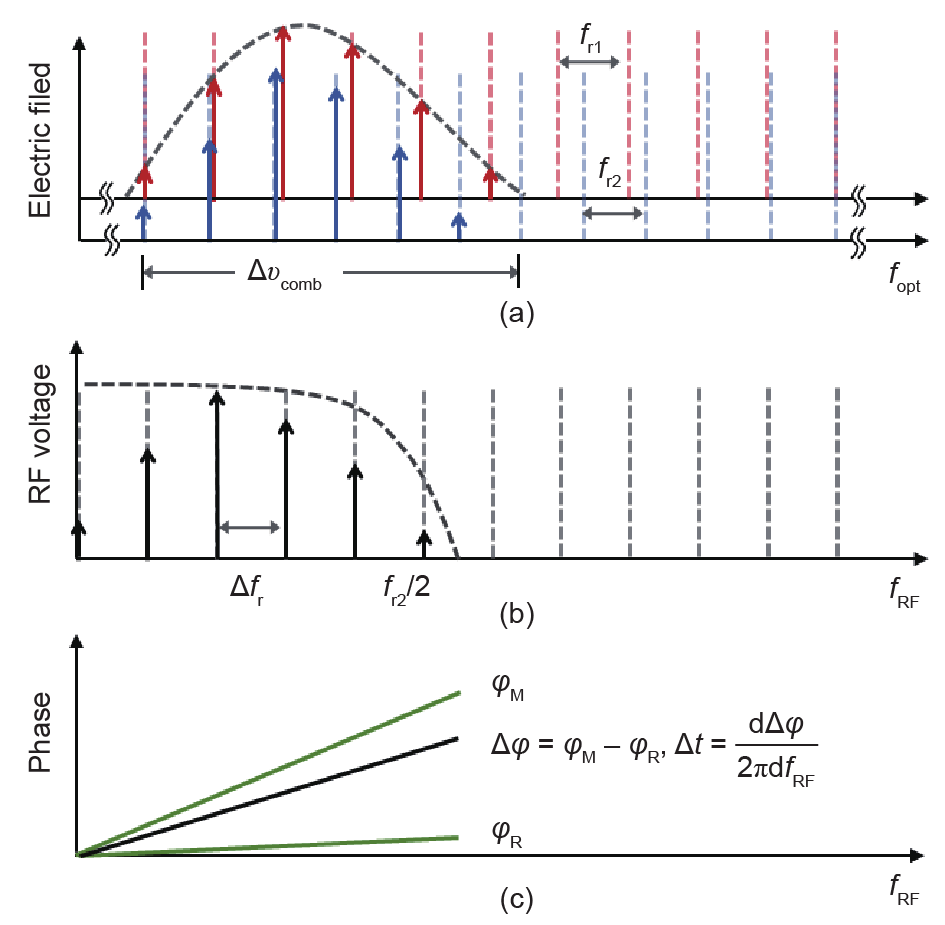
图3. 双光梳测距系统原理的频域描述。(a)两台具有微小重频差的光 梳;(b)射频梳;(c)射频梳的相位信息。在(a)和(b)中,曲线 代表系统中用的DBPF和电学LPF。直虚线代表光频梳和射频梳在滤 波之前的纵模。fopt:光频;fRF:射频。
这和时域中的奈奎斯特采样定理推导结果是一致的。实际上,双光梳测距系统产生了两个射频梳,因为如上文所示,信号光脉冲被一分为二。两个射频梳之间主要的区别是它们的相位谱(φR对应参考信号IR,φM对应测量信号IM)。如果我们把双光梳测距系统看作色散干涉法测距[14],那么飞行时间信息可以通过相位-频率的斜率信息来获取,即:∆t=d∆φ/(2πdfRF),其中Δφ=φM–φR;fRF是射频频率。更详细的推导过程会在第三部分给出。
《2.2. 参数优化》
2.2. 参数优化
双光梳的参数对双光梳飞行时间法测距精度具有重要影响[19,22,24]。需要满足的一个基本条件是射频梳频谱需要在0~fr2/2之间,如图3所示。根据奈奎斯特定理式(3),当fr1、fr2和∆vcomb保持固定大小时,较小的∆fr更有利于防止频谱混叠,同时得到更大的系数m=fr1/∆fr,有利于获得更小的时间抖动(Δτ=Δt/m)。然而,通过对公式(2)的不确定度分析会得到相反的结论。为了简化公式,在飞行时间法测距的相对不确定度(UD/D)分析中用D代替DTOF,如下所示:

第一,我们忽略了主要由环境干扰造成的脉冲飞行速率的不确定度,余下3项分别是Δt、Δfr和fr1的不确定度(记为u∆t、u∆fr和ufr1)。显然,更大的Δfr会减少相对不确定度。因此,需要选择一个双光梳测距系统Δfr的最优区域,该结论已经由实验和仿真验证[19,22]。而且,最优区域范围会随着双光梳测距系统不确定度大小的变化而变化。
第二,我们更倾向于选择更高的重频来减小ufr1/fr1和u∆fr/Δfr,因为一旦拥有更高的重频,意味着可以选择更大的重频差。因此,我们可以同时提高测距精度和测距速率。然而,精度、速率和非模糊距离υ/(2fr1)之间需要权衡。这样的高重频双光梳测距系统通常由耗散克尔孤子(DKS)态微腔光频梳[30,31]和电光调制光频梳[32–34]实现,它们可以提供高达兆赫兹量级的测量速率、亚微米的飞行时间法测距精度以及毫米量级的非模糊距离。
第三,一种简单的算法可以降低待测时延Δt的不确定度[27],修正后的时延可以表示为:

式中,ΔtRR是两个连续参考干涉信号之间的时延。这样, Δt和ΔtRR共同的不确定度就会被部分消除,得到更稳定 的时延结果。
总而言之,可以通过调整重频差、重频、飞行时间计算方法,优化基于飞行时间法的双光梳测距系统。尽管受限于强度噪声(见第四部分),飞行时间法测距的精度通常可以被提高至亚微米级。但无论强度噪声存在与否,测距精度仍可以通过双光梳测距系统中干涉法的应用得到提高,详见第三部分。
《3. 精度提高:双光梳测距系统中的干涉法》
3. 精度提高:双光梳测距系统中的干涉法
《3.1. 光梳相位信息》
3.1. 光梳相位信息
图3给出了双光梳测距系统的频域原理,时延可由相频斜率信息计算。同时,也有可能获得所有纵模的稳定相位信息。信号光梳(Comb 1)的电场(ER(M),包括参考和测量脉冲)和本振光梳(Comb 2)的电场(ELO,本振光脉冲)可以表示为:

式中,f1(n1)和f2(n2)分别代表信号光Comb 1和本振光 Comb 2的纵模频率,A(n1)和A(n2)为其对应振幅;i为虚 数标志。信号光和本振光电场干涉产生参考和测量干涉 信号:

式中,k代表ER(M)(n1)和ELO(n2)产生的射频梳纵模的序号,即fRF(k) = f1(n1)–f2(n2),* 是复数共轭标志。接着,我们可以从射频梳纵模相位中得到对应光频梳纵模的相位差信息:

因此,干涉法可以在系统中得到应用,介绍如下。
《3.2. 合成波干涉法》
3.2. 合成波干涉法
合成波干涉法是一种有效的过渡式测距法来提高测距精度。因为它具有可调节的非模糊距离和相对于飞行 时间法更高的精度。因此,这种方法在单光梳测距系统中得到了广泛应用[9–13]。鉴于双光梳测距系统是一种可实现纵模分辨的干涉仪,故它能够利用两根纵模构造合成波长(λsyn),表示如下:

式中,λ1和λ2为纵模波长,对应相位为Δφ1和Δφ2。合 成波相位为φsyn=Δφ1−Δφ2。为了克服公式(3)中所限 制的测量光谱带宽,两个中心波长不同的带通滤波器 可以用来扩展波长差[18]。因此,可以通过合成波长 及其相位信息来获得一个更高精度的测距结果(Dsyn), 表示如下:

式中,Nsyn是由飞行时间法结果DTOF所确定的一个整数, 表示如下:

式中,INT代表取整符号。合成波长通常有几十微米, 可以和飞行时间法结果进行直接衔接,合成波测距的精度一般能达到1 μm。
《3.3. 载波干涉法》
3.3. 载波干涉法
载波干涉法是一种精度极高的干涉法,也可以应用于双光梳测距系统。其基本原理与使用单波长光的迈克尔孙干涉仪类似,但不同于相位累积计数的方式,合成波测距结果Dsyn可以用来确定半载波波长λc/2的整数倍。在这个过程中,合成波测距结果需要平均直到其精度优于λc/4。整数Nc表示如下:

最终,通过载波干涉法获得一个精度极高的测距结 果(Dc)如下所示:

式中,φc是波长为λc的载波的相位,任一Δφ1和λ1或Δφ2和λ2可以用来作为载波信息。
把这些干涉法应用到双光梳测距系统的过程如图4所示[18]。如果待测距离超过了飞行时间法的非模糊距离[υ/(2fr1)],需要其他方法来粗测距离,例如通过交换信号光与本振光构建一个长为υ/(2Δfr)的合成非模糊距离,通常可以达到10 km数量级[17,21]。
《图4》

图4. 飞行时间法、合成波长法、载波干涉法在双光梳系统中的结合。
总之,DCR系统是用较小的硬件增量进行测距的一个强大的测距工具。DRC系统的基本要求是相位信息的可用性,这是很难实现的。在下一节中,我们讨论了DCR系统中的相位噪声和其他噪声,并介绍了一种当前抑制噪声的解决方案。
《4. 噪声分析和解决方法》
4. 噪声分析和解决方法
《4.1. 频率噪声、相位噪声和时间抖动》
4.1. 频率噪声、相位噪声和时间抖动
如前文所述,双光梳干涉仪本质上利用光频梳产生了射频梳,因此锁模激光的噪声分析方法也可以用于双 光梳系统[66–69]。本文关注光源噪声的表现形式而不涉及其物理本质,这样有助于理解之后用于抑制噪声的紧密锁定法和后处理法。
光频梳的重频由等效腔长决定,即fr=υ/L,L为腔长。简便起见,所有实时环境干扰造成的腔长变化记为δL。造成的实时重频频率噪声为δfr(t) = –fr (δL/L),对应重频的相位噪声为:

式中,τ是积分时间;t代表真实时间。脉冲时间抖动则可以表示为:

在双光梳测距系统中,将两台光梳的相位噪声合二为一。那么由于射频梳的重复频率为Δfr,干涉信号的时间抖动(Tjitter)为

时间抖动的测量可以直接在时域上获得,如使用平衡光学互相关法[66]。由于该方法比较复杂,所以基于双光梳系统的光学外差法更适合[60,70],而且两台光梳纵模之间的相对噪声也可以测得。其原理如图5所示,一台连续激光作为光学中介获取相对拍频fb=f1–f2。该系统中,两台光梳被全锁定到射频参考信号以避免参数的漂移,从而可以进行准确的噪声测量。对于两台光梳自由运行的情况,则需要两台波长不同的连续激光来区分偏频和重频的噪声[60,61]。计算相对拍频的实时频率噪声[δfb(t)]比较简单。与公式(14)类似,两台光梳纵模之间的相位噪声为δφb(t),从中还能确定相对重频相位噪声为δφr(t)=δφb(t)/n1。注意只要系统Δfr不太大,那么n1≈n2。最终,双光梳系统的频率噪声、相位噪声即时间抖动都可以被测出。
《图5》

图5. 产生测量双光梳相对相位噪声测量信号的原理。连续激光分别与 两台光梳产生拍频fCW,1 =fCW –f1(n1)、fCW,2 =fCW –f2(n2)和fb =f1(n1) –f2(n2)。
特别的是,对于基于光纤光梳的双光梳系统,其相对拍频线宽能达到100kHz量级,其相位噪声波动范围达到约104rad,使得时间抖动达到了约100ns水平[60]。该线宽远远超过射频梳纵模间隔Δfr,纵模相位噪声也远远超过了2π。即使对于那些具有高互相干性的基于非常规光源的双光梳系统,如自由运行的锁模双向环形腔双光梳光源[26,71,72]和基于同一连续激光的电光调制双光梳[32–34,73],也没有实现可分辨的相位信息。因此要想实现前文中的高精度双光梳测距系统,还必须有噪声抑制方法。
《4.2. 紧密锁定法》
4.2. 紧密锁定法
传统方法是使用两台超稳连续激光作为精准光学参考来稳定偏频fo和重频 fr[17,37,42]。如果 fo通过 f−2f 干涉仪进行稳定,那么只需要一台超稳连续激光[51]。以图5中的Comb 1为例,fo1和 fCW,1应当被锁定,如果连续激光参考到超稳腔上,那么系统就能获得一个稳定的重频。实际上因为高互相干性,而不是单台光梳的稳定性才是双光梳系统中最重要的,故一种基于电光调制器的同步锁定方法可以作为一个替代方法。具体来说,可以通过锁定fo1、fo2、fr1、fCW,1和 fCW,2[46]或者 fo1、fo2、fr1和 fb [18,62]来实现。另外还提出了一种原理类似的前置反馈系统[63],它是通过声光调制器和压电陶瓷(RZT)来实现同步。这些紧密锁定方法可以实现纵模可分辨的和相位稳定的射频梳。然而,双光梳紧密锁定系统较高的复杂性和成本会造成未来应用中的更多挑战。
《4.3. 后处理校正法》
4.3. 后处理校正法
另一种方法是后处理校正法,它连续记录双光梳之间的参数波动并直接补偿双光梳干涉信号中的噪声,而不是反馈到光梳光源。两种有效的后处理校正方法分别是模拟信号处理[48,74]和数字信号校正[47,49,61],两者原理相似:运用两台波长不同的连续激光作为光学桥梁,得到两个光梳之间的相对拍频。这样的两个相对拍频信号足够反映两台光梳间相对偏频噪声和相对重频噪声。由于所有纵模的偏频噪声是一致的,射频梳的偏频相位噪声很容易得到校正。另外,两个相对拍信号的差频信号与偏频噪声无关,通过它构建对干涉信号的时域重采样,来校正重频差的噪声。如果是在高重频双光梳测距系统中[59],两个相对拍信号可以直接从射频梳中获得,那么后处理将更简单。如果两台光梳还具有原始的高相干性,那么甚至可以实现自校正[75],它可以抑制双光梳相对频率噪声,足以用来实现纵模可分辨的光谱。
对于高精度双光梳测距系统,稳定的相位信息也是需要的,但目前还没有通过后处理方式实现。笔者在近期的工作中提出了一种数字矫正方法,实现了纵模可分辨的和相位稳定的双光梳干涉仪[60,64]。该方法关注的是干涉信号的载波相位噪声和时间抖动,其中载波相位噪声通过相对拍频 fb (图 5)计算得到,即δφc (t) =δφb(t)·(fc/fCW)。校正算法在时域中实现,分为两步:
第一步,校正干涉信号的载波相位噪声:

式中,I0代表原始干涉信号;I1表示相位校正的干涉信号。
第二步,移动干涉信号包络来补偿时间抖动,获得相位-时间校正的干涉信号I2 :

第三步,可以获得的双光梳干涉信号具有亚赫兹的相对线宽、1ns的时间抖动以及0.2rad的相位精度。后处理校正双光梳系统避免了高带宽主动反馈的挑战。此外,数字补偿法节省了模拟信号处理所需的射频元器件,它还可以结合现场可编程门阵列(FPGA)实现实时信号处理,是一种更强大的噪声处理方法。
《4.4. 强度噪声》
4.4. 强度噪声
除了上述介绍的噪声,强度噪声也有可能影响双光梳测距系统的性能。我们通过仿真改变干涉信号的时域信噪比来验证强度噪声对时间抖动和载波相位抖动的影响。图6给出了信噪比(SNR)为10~103范围下的结果。由强度噪声造成的载波相位抖动δφc∝SNR在大部分情况下可以忽略,因为即使采用了紧密锁定[18]或后处理校正法[60]也会存在约0.1rad的噪声。但是SNR对时间抖动具有显著影响。当SNR=40时,仿真得到约1ns的时间抖动,与实际实验结果吻合[62]。另外仿真结果表明最好将SNR保持在20以上。当SNR<20时,相干平均可以抑制强度噪声提升SNR,即SNR∝T1/2,T代表相干平均时间[37,76]。而且,相干平均在时域上直接平均干涉信号可以解决长时间数据记录的过载问题。相干平均需要满足两个条件:一是两台光梳的重频和偏频差必须为重频差的整数倍值;二是载波相位需要足够稳定,这可以由紧密锁定和后处理校正实现。在测距应用中,相位信息反映了距离信息,因此不能人为调整载波相位来满足相干平均的条件。
《图6》

图6. 通过仿真计算得到时间抖动、相位抖动和信噪比(SNR)的关系。
《5. 结论》
5. 结论
总而言之,光频梳是一种理想的测距光源,它提供了快速脉冲和宽带的离散光学纵模。而双光梳系统充分利用了这些特性,从而实现了高精度、快速率、长非模糊距离。随着光频梳技术的发展,双光梳测距系统会成为更轻便、集成的工具,从而代替传统测距工具在实验室或现场的应用。另外未来还需要考虑关于空气折射率[77]对双光梳测距结果的影响。而双光梳测距系统也将进一步与其他需要幅频、相频信息的应用如三维成像[53–57]等应用相结合。
《致谢》
致谢
本 研 究 得 到 了 国 家 自 然 科 学 基 金(61575105、61611140125)、北京自然科学基金(3182011)和深圳基础研究基金(JCYJ20170412171535171)的资助。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Zebin Zhu and Guanhao Wu declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




