
《1. 引言》
1. 引言
牙体窝洞制备是口腔医学中的一项基本临床操作,是在牙齿修复过程中用来填充特殊材料的凹洞,它是通过牙科手术在牙体的正面或侧面去除受损组织而形成。通常,牙体窝洞的深度、长度、宽度和角度等参数具有严格的标准,因而对其评估已是临床教学中的一项重要工作。利用计算机辅助三维(3D)重建进行数字化评估已成为牙科教学的重要手段,但是目前使用的数字化评估系统价格昂贵、存在盲区且精度不够[1,2]。3D激光扫描法具有精度高、速度快、易于实现等优点[3–6],该方法将线激光投射到物体上,收集经被测物体调制过的激光条纹图像,通过光学三角法解算图像与物体之间的数学关系。其中系统标定至关重要,它决定了测量结果的有效性和精度。
实际标定过程中主要存在两个问题。第一个问题是,如何设计合适的标定方法来获取大量精确的标定点。对此,Dewar[7]提出了“拉丝法”,段发阶等[8]提出了齿形靶标定法,这两种早期的方法都需要借助昂贵的外部设备,且获取的标定点较少、精度不够;Huynh等[9]提出了获取标定点的方法,能够获取较高精度的标定点,但存在立体标靶加工困难、标定点较少的缺点;目前,平面标靶[10–12]以其制作简单、使用灵活等特点得到了广泛应用。此外,对于旋转平台的线结构光3D扫描系统,还要对其旋转轴进行标定[13–15]。上述方法大多涉及复杂的人工操作,这使标定方法的便捷性设计变得尤其重要,因为在每次测量执行之前必须重新标定系统以消除由运动或环境变化引起的误差。
第二个问题是如何利用合适的标定算法实现从二维(2D)图像坐标到3D世界坐标的转换。标定可分为数学建模法和机器学习法两类。数学建模法需要先标定出摄像机内部参数,再标定出摄像机与光源的位置关系,从而建立准确的数学模型。由于存在成像畸变、系统误差等因素,高精度的数学模型非常复杂。机器学习法则通过人工神经网络和遗传算法等直接建立图像坐标系和世界坐标系的关系[16,17],不用建立数学模型,但存在较高的不确定度。本文开发了一种用于牙模3D重建与评价的双平台激光扫描仪,提出了一种混合标定法以显著提高其效率和测量精度。
《2. 激光扫描测量方法》
2. 激光扫描测量方法
《2.1. 测量原理》
2.1. 测量原理
线结构光扫描测量原理如图1所示,激光器将线结构光投射在被测物体上,通过摄像机采集到带有激光光条的图像。假设P是被测物体上的一个点,当P点被线结构光扫描时,成像在图像平面的光条上一点P′。其中涉及4个坐标系:世界坐标系owxwywzw用于描述物体的3D轮廓信息;相机坐标系ocxcyczc是以相机为中心建立的3D坐标系,其原点oc是相机的光心;图像坐标系o0xy是在感光芯片(即成像平面)上建立的连续的2D坐标系,其原点o0是光轴与图像平面的交点,oc与o0的距离即为相机的焦距f;像素坐标系ouv表现为互补金属-氧化物半导体(CMOS)相机像素阵列的下标,可由计算机直接读取,原点o位于数字图像的左上角。通过图像处理可得到P′的像素坐标,再把像素坐标转换世界坐标系,就可以得到P点的3D坐标信息。
《图1》
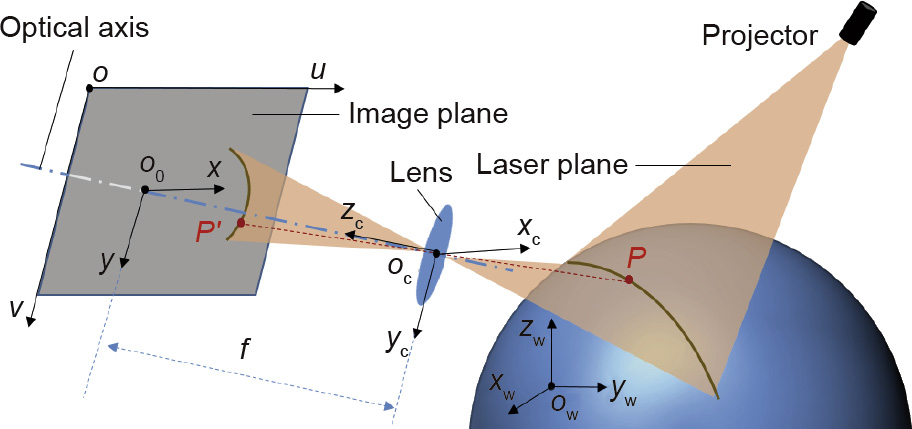
图1. 线结构光扫描测量原理图。
若o0点对应的像素坐标为(u0, v0),则像素坐标系ouv与图像坐标系o0xy的关系可表示为:

式中,sx和sy为CMOS相机上单个像素的宽度和长度,通常可由相机的生产厂商提供。
在理想的小孔成像模型中, 相机坐标系下的点P(xc,yc, zc)与其像点P′(x, y)通过镜头和光轴形成两个相似三角形,由相似关系可得:

式(2)通常写作齐次坐标形式:

同时,相机坐标系ocxcyczc 到世界坐标系owxwywzw 是一个3D空间的刚体变换。假设R为3 × 3旋转矩阵,T为平移向量,则:
综上,由式(1)、式(3)和式(4)联立可得由像素坐标系ouv到世界坐标系owxwywzw 的相机模型。
式中,M1 和M2 分别为相机的内参数矩阵和外参数矩阵。M为相机的投影矩阵,如式(6)。
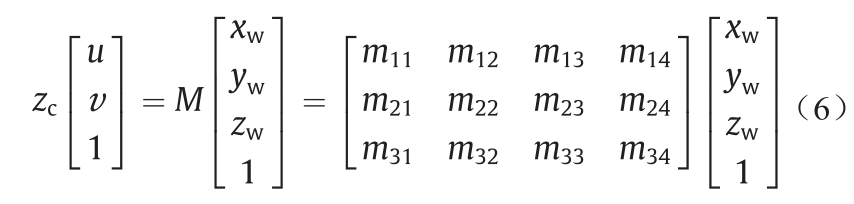
在3D激光扫描过程中,扫描方向通常沿世界坐标系的xw轴进行,因而xw可由扫描机构的控制模块直接获知。其余二维信息(yw, zw)则可通过消去式(6)中的zc来获得:

式(7)表示了3D激光扫描在理想情况下的基本模型。然而,在实际使用中,由于加工和组装等方面的误差,往往存在较大的畸变。一般而言,对测量影响较大的相机畸变主要是径向畸变和切向畸变[18]。径向畸变通常由透镜加工误差引起,切向畸变则是由相机的组装误差引起。它们的畸变模型分别是:
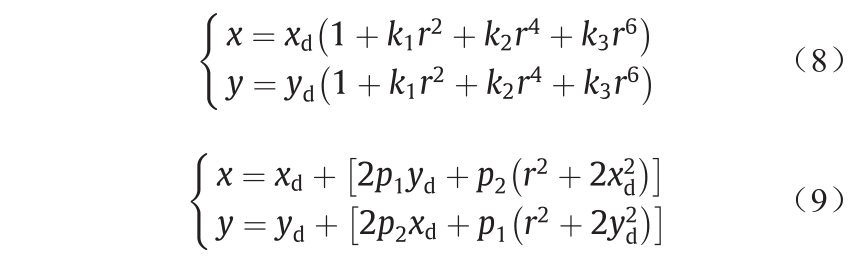
式中,xd 和yd 是实际成像位置;x和y是理想成像位置;r2= x2d + y2d;k1、k2、k3 为径向畸变系数;p1和p2是切向畸变系数。在这种情况下,f、u0、v0、R、T、k1、k2、k3、p1和p2需要在测量执行之前通过系统标定来确定。
《2.2. 标定方法》
2.2. 标定方法
上文提到,标定的目的是建立图像像素坐标系(u, v)和世界坐标系(yw, zw)的准确的转换关系。完成这一工作通常有两种方法,即数学建模法和机器学习法。
数学建模法首先基于基本原理建立像素坐标系和世界坐标系的数学关系式,然后通过非线性优化等方法求解出这些数学关系式中的未知参数。其中,Tsai[19]提出的两步法和张正友[20]提出的标定法是使用最为广泛的两种方法。一般而言,Tsai两步法使用3D立体标定靶,张正友标定法使用二维平面标定靶。在张正友标定法中,首先采集二维标定靶在不同位置处的图像,由于标定靶上的点共面,可以通过一个位置的图像建立空间关系的两个方程,因此通过多个位置的图像就可以建立方程组,从而求解出相机模型的参数。张正友标定法的计算过程如下:首先在假设没有畸变的情况下求解参数的初始值,然后基于这些初始值用最小二乘法计算畸变系数,最后通过极大似然估计对得到的参数值进行优化。
在Tsai 两步法中,往往只考虑对标定结果影响最大的二次径向畸变,此时实际成像点与理想成像点存在径向排列约束(radial arrangement constraint,RAC):

由于(u0, v0)可以通过光学方法来确定,(xd, yd)已知,因此由式(10)可知,7个以上标定点即可求解中间变量 r1/ty、r2/ty、r3/ty、rx/ty、r4/ty、r5/ty和r6/ty。首先,根据旋转矩阵的正交性计算出外部参数R、tx和ty;然后,基于相机和畸变模型并通过非线性优化计算其余参数f、k1和tz。
机器学习法可以通过训练样本数据集直接建立输入量(u,v)和输出量(yw,zw)的转换关系。机器学习法本质上是一种黑箱算法,在计算过程中不涉及内部参数和外部参数。ANN是一种典型的机器学习方法,其中,反向传播神经网络(BPN,ANN的一种)在建立非线性映射关系时具有较高的通用性和计算精度[21,22]。BPN学习规则是最速下降法,通过反向传播来调整网络的权值和阈值,使网络的误差平方和最小。其拓扑结构如图2所示,它包含输入层、隐层和输出层,每层由多个结点构成,这些结点类似于生物学上的神经元。
《图2》

图2. 一个3层BPN的结构图。
BPN的学习过程可以分为两个部分:数据的前向运算实现了从n维到m维的映射;而误差的后向传播则不断调整网络的权值和阈值,从而对这一映射进行修正。在数据的前向运算中,数据由输入层经过隐层流向输出层,每层神经元的状态只影响下一层神经元。对于隐层中的一个结点hk,该值由阈值ak、相关输入数据xi和权重vki来确定,其计算如下:

式中,Vk = [ak vki vki … vkn] T ;X = [1 x1 xi …xn];f1是激活函数;Sk 是该结点的净输入。同样对于输出层的一个结点yj ,该值由阈值bj 、相关输入数据hk和权重wjk来确定,其计算如下:

式中,Wj = [bj wj1 wjk … wjq] T ;H = [1 h1 hi …hq];f2是激活函数;Sj 是该结点的净输入。在误差的后向传播中,误差由输出层经隐层流向输入层,通过调整网络参数减小全局映射误差,从而逼近真实映射关系。假设网络有P个训练样本,全局映射误差的表达式如下:

式中,Ep 是第p个样本的误差; 是第p个样本的第j个结点的期望输出;
是第p个样本的第j个结点的期望输出; 是实际输出。基于全局映射误差,用最速下降法计算网络参数的变化量:
是实际输出。基于全局映射误差,用最速下降法计算网络参数的变化量:
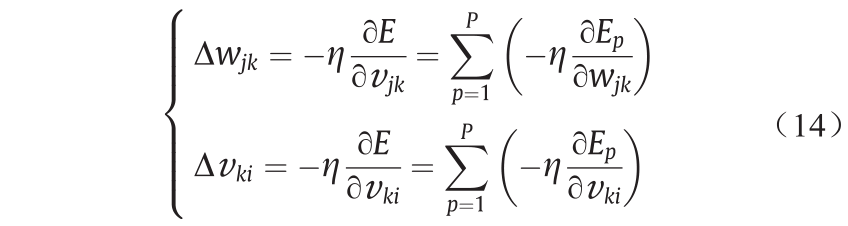
式中,η为网络的学习率。由主链式法则可得式(14)的具体形式:
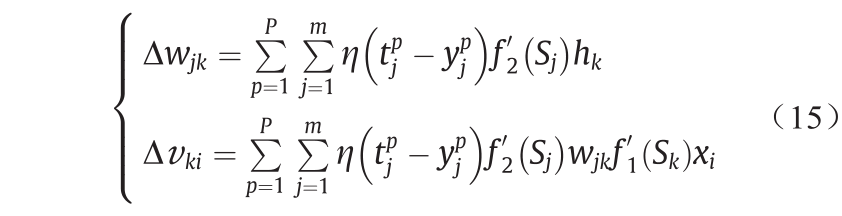
BPN的结构使其具有强大的非线性映射能力和广泛的通用性,采用BPN对系统进行标定就是把(u, v)和(yw ,zw )分别看作输入量和输出量。根据式(11)、式(12)和式(15),标定结果的计算过程即网络的学习过程。
数学建模法转换关系更加明确,具有较高的稳定性和可靠性,但是很难对大量参数进行拟合和求解。且建立数学关系式时往往只关心主要的相机畸变和对标定结果影响较大的因素,因而无法有效处理转换关系中其他非线性成分和不确定性因素,影响最终的标定精度。机器学习法理论上可以处理所有的成像畸变、结构误差和其他不确定性因素,这一点看起来更符合线结构光扫描标定的要求,然而在实际应用中并不能达到预期效果,因为以人工神经网络为代表的机器学习法容易陷入局部极值,也就是常说的“过拟合”问题和泛化能力弱的问题。泛化能力弱意味着网络在训练样本集上具有很好的计算效果,而在其他测试样本集上计算结果很差或不正确,这时只有标定点附近的很小区域可以被正确测量。此外,由于成像畸变和其他因素造成的标定误差很小,通常比基本模型决定的理想值小两个数量级以上,而数学建模方法和机器学习法都是直接对数据进行处理,从而容易造成畸变和其他部分误差被理想值所掩盖,即“数据淹没”问题。以数据处理中常用的归一化为例:
式中,y是输出样本数据,包含理想成分f和误差成分e(包括成像畸变和其他部分误差)。由于e远远小于f,当分式两边同时除以f时,e/f接近于0,最终的归一化就忽略了误差成分,而近似于纯理想情况下的结果。
《3. 双平台激光扫描仪》
3. 双平台激光扫描仪
在离体牙模的3D测量过程中,若窝洞位于牙齿的正面,则需要通过平移扫描进行测量;若其位于牙齿侧面,则旋转扫描的方式比较合适。针对以上需求,本文设计了一种双平台3D激光扫描系统,集成平移和旋转两种扫描方式以兼顾不同类型的牙模。如图3所示,系统设置了两个摄像机、一个线激光发射器以及两个运动平台,其中旋转平台装载于平移平台上以实现不同扫描模式的切换。旋转扫描模式下,需保证旋转中心Or处的刻度线位于线结构光光平面内,并与水平面xwowyw保持一定的倾角,β以实现对被测物的全面扫描。采用两个摄像机从不同角度进行采集,能够有效消除盲区,保证点云数据的完整性。
《图3》

图3. 双平台激光扫描仪的结构设计。
系统做平移扫描时,被测物跟随平移平台垂直于光平面运动;建立世界坐标系时,令平台运动方向为xw轴,则光平面和ywowzw平面重合;xw坐标值可通过平移平台的控制模块直接获取,(yw, zw)由标定结果计算得到。旋转扫描的坐标提取原理与平移扫描相同,旋转平台每转一个角度,系统采集一次数据,只要标定出旋转平台的倾角β以及旋转中心Or(yr,zr),就可以通过去倾斜和旋转拼接,将每次得到的数据(yw,zw)拼接为被测空间物体的完整点云坐标。其中,去倾斜是将当前坐标系以旋转中心Or为原点,绕轴xw逆时针旋转角度β,得到去倾斜后的数据,如式(17)所示;旋转拼接是将每次采集的数据按照旋转的角度θ组合在一起,得到最终的点云数据(xwr,ywr,zwr),如式(18)所示。
本文搭建的双平台激光扫描装置如图4(a),其中所用相机的图像分辨率为1280 × 1024,有效视场范围为20 mm × 18 mm,其像素物理尺寸sx和sy为5.2 µm × 5.2 µm;图4(b)是实验所用的标定靶,具有5个光滑梯面的阶梯状结构,每阶高度为2 mm,每个梯面的尺寸为20 mm × 5 mm;图4(c)是旋转平台标定的辅助图案,中间为直径10 mm 的白色圆形区域,用于提取旋转平台的空间坐标点。
《图4》

图4. 双平台激光扫描实验装置。(a)双平台激光扫描仪;(b)平移平 台及标定块;(c)旋转平台及辅助图案。
《4. 混合标定》
4. 混合标定
对于双平台扫描仪,首先通过平移扫描标定,建立图像坐标点到世界坐标点的转换关系;然后通过旋转扫描标定计算出平台倾角β和旋转中心Or (yr, zr)。本文采用一种综合的标定方法获取大量的标定点,并且对平移和旋转扫描同时进行标定。此外,提出一种将数学建模法和机器学习法相结合的混合标定算法建立有效模型,提高标定精度。
《4.1. 标定方法》
4.1. 标定方法
平移扫描的标定通过一个阶梯状标定块进行,可根据其已知的物理尺寸获取大量的空间坐标点。在标定时,将标定块放在一维运动平台上,随着运动平台的移动,线结构光投射在不同高度的梯面上。此时,步进采集带有光条的梯面图像,进行阈值分割和光条中心的提取,从而获得与空间坐标点相对应的图像坐标点。图像的光条中心的亚像素级坐标可以通过高斯拟合的方法得到[23]。最后,根据混合标定算法,建立图像坐标点到空间坐标点的转换关系,完成平移标定。在得到平移扫描的标定结果后,还需标定出旋转平台的倾角β和旋转中心Or,才能进行旋转扫描。平台倾角的标定方法如下:调整旋转平台的位置,使线结构光经过旋转平台的旋转中心,将辅助图案粘贴在旋转平台上,然后对旋转平台进行图像采集,并提取光心坐标,完成坐标映射。利用最小二乘法,把得到的空间坐标点拟合成一条直线,直线的斜率就是平台倾角的正切值。旋转中心的标定原理如图5所示,由于线结构光经过旋转中心,旋转平台转动180°前后的图像存在对称性。P1是图像中光条的一个端点,其在旋转后的图像中的对应点为P1 ′。P1 和 P1 ′是关于旋转中心Or对称的,这一性质可以用来标定旋转中心Or (yr, zr)的位置。为保证旋转中心的精度,可以在辅助图案上选取多个位置进行多次实验,取平均值作为最终结果。随后,P2和 P2 ′ 用于计算旋转扫描的误差。
《图5》
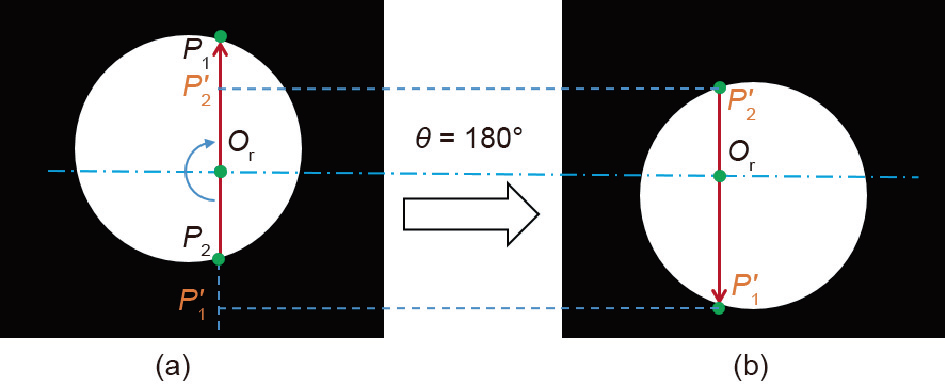
图5. 旋转中心标定原理。(a)参考位置;(b)旋转180°。
《4.2. 混合标定算法》
4.2. 混合标定算法
本文针对数学建模法和机器学习法存在的问题,提出一种将两者结合的混合标定算法。算法中像素坐标系到世界坐标系的转换关系分为两部分,如图6所示,混合模型由基本模型和补偿网络共同组成:其中基本模型用于计算转换关系的主体成分;补偿网络用于计算转换关系的其余成分,包括所有的成像畸变和测量误差。为了建立混合模型,首先假设不存在畸变,采用数学建模法求解基本模型,即主体部分,然后计算主体部分与真实值的残差,并以残差为输出,采用机器学习法建立补偿网络。
《图6》

图6. 混合标定算法。
基本模型由式(7)给出,此处为了计算方便可以写成:
它的矩阵形式为:

式中, 

标定过程中,采集到的标定点远远多于未知量的个数,a1–a9可由最小二乘法求解:

采用BPN建立输入数据与残差之间的补偿网络,用于补偿主体部分。以像素坐标(u, v)为输入数据,主体与真实值Yreal的残差E(ex, ey)为输出数据。

网络结构可以设为3层,输入层和输出层都为两个结点。混合标定算法相对于数学建模法和机器学习法具有优越性。一方面,混合标定算法兼具数学建模法和机器学习法的优点,同时弥补了它们的不足。与纯数学建模法相比,混合模型表征的转换关系比建立的数学关系式更加完备,能够处理转换关系中的不确定性成分,因为所有的畸变和误差都可以被网络部分补偿;与纯机器学习法相比,混合标定算法更加明确和稳定,因为算法内部不再是“黑箱”形式,混合标定算法中的基本模型保证了转换关系的主体部分并提升了算法的泛化能力,一般情况下,可以将泛化误差限制在残差E(ex,ey)大小的范围内。另一方面,混合模型能够在数据处理时减小理想成分对误差成分的影响,因而可以获得更高的标定精度。混合标定算法在一开始就将转换关系分成了两部分,主体成分和其余成分分别独立计算,从而有效避免式(16)中的“数据淹没”问题。
《5. 3D 重建》
5. 3D 重建
激光扫描的结果是点云数据,需要对点云进行精简和重建处理,以还原并存储被测物体的3D形态。
《5.1. 点云精简》
5.1. 点云精简
初始点云含有大量的冗余点,增加了运算量,降低重建效率,在进行三角剖分之前需对点云进行精简。提出一种形态分析的精简方法,根据点云的形态特点对点云数据进行处理,处理效率较高,精简效果较好。
对于平移扫描得到的点云,点云分布的密度在光条方向上较大,在扫描方向上较小,因此在光条方向上存在大量的冗余点,如图7所示。冗余点会大大增加运算时间,降低重建效率,本文根据线结构光平移扫描数据的这一特点,通过在点云数据的光条方向上剔除冗余点实现点云精简。为保留点云的特征信息,计算光条上的相邻点之间的距离,若距离大于设定的阈值,说明这些点含有较多的特征信息,应予以保留,其余点则按照点云在扫描方向上的密度随机采样。
《图7》

图7. 平移扫描点云。
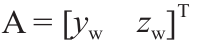
对于旋转扫描得到的点云,点云数据围绕旋转中心呈辐射状分布,越靠近旋转中心,点云密度越大,冗余点越多,如图8所示。因此,可以围绕旋转中心将点云数据划分为n个同心圆区域,同心圆的半径分别为r, ,则每个同心圆环的面积相等。根据点云分布特点,每个圆环中点云数量与圆环宽度成正比,设比例为k,则第i个圆环的点云密度为:
,则每个同心圆环的面积相等。根据点云分布特点,每个圆环中点云数量与圆环宽度成正比,设比例为k,则第i个圆环的点云密度为:

结合曲率法,根据每个同心圆环中点云密度的大小设定精简阈值,分别进行精简,最后得到分布均匀且保留较多特征信息的完整点云。
《图8》
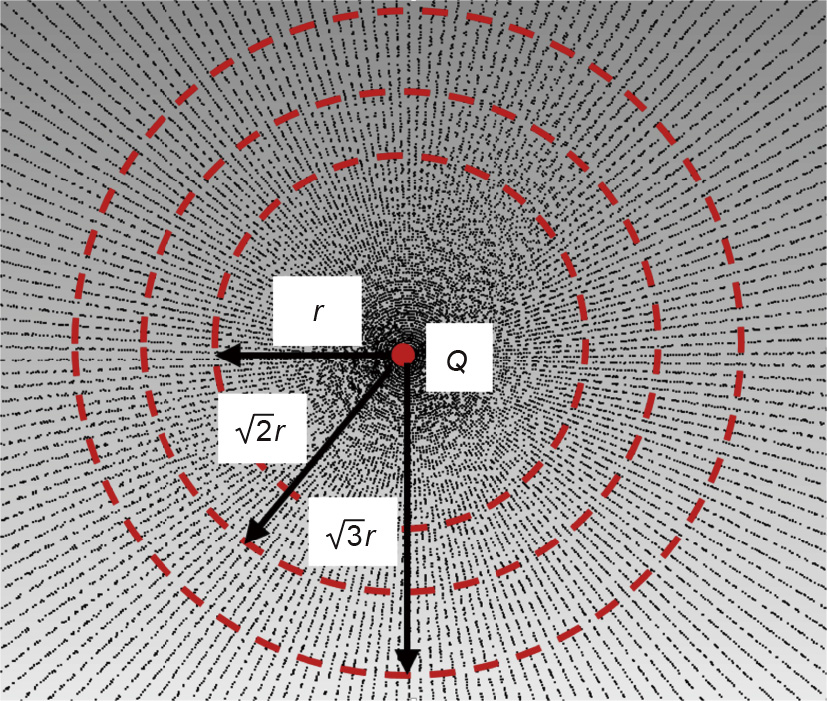
图8. 旋转扫描点云。
《5.2. Delaunay 三角剖分》
5.2. Delaunay 三角剖分
三角网格具有占用存储空间少、表示曲面精细度好的特点,已成为在计算机中实现3D显示的主要手段。3D点云数据的三角剖分一般有两种途径,一种是对3D点直接进行剖分,一种是将3D点投影到2D平面,利用2D平面三角剖分建立网格。前者运算量比较大,且算法稳定性不高;而2D平面三角剖分具有很好的理论基础和数学特性,但是只适用于向某一方向投影没有重叠的曲面。
由图3所示的平移扫描原理可知,线结构光平移扫描的得到的点云数据,实际上可以看作被测对象在xwowyw平面的投影,因此,平移扫描点云表征的是一个向xwowyw平面投影没有重叠的曲面,可以直接通过2D投影,利用Watson 算法进行三角剖分[24]。使用Watsan算法进行Delaunay三角剖分的过程如下:①构建一个超级三角形ΔE使其包含所有的点;②从点集中插入一个新的点,将其与三角形ΔE的3个顶点相连,形成初始网络;③插入一个新的点,找出“影响三角形”,影响三角形是指包含该点的三角形;④根据Delaunay 三角形的特性,删除影响三角形的公共边,将该点与相关顶点相连,形成新的网格;⑤重复③和④直到点集中的所有点都被处理。
旋转扫描点云因为具有回转体的特征,向任何方向投影都存在重叠的问题,因此不能直接通过2D投影进行三角剖分。考虑旋转点云的获取过程,旋转点云数据在去倾斜和拼接之前,仍然是由线结构光投影得到的,因此,可以通过坐标变换将旋转点云按扫描位置倾斜和展开,展开后的点云具有线结构光投影的形态,可以进行2D投影三角剖分,完成剖分后再将三角网格拼合在一起,就得到旋转点云的完整剖分。
旋转扫描点云生成网格的过程可以概括为:①将具有回转体特征的旋转点云分成A、B、C、D4个区域,并保证A、B、C、D具有相互重叠的边界点,如图9所示;②分别对每个区域以旋转中心为原点进行坐标变换,将其展开为去倾斜和拼接前的形态;③此时每个区域成为与xwowyw平面投影没有重叠的曲面;④分别对每个区域进行2D投影剖分;⑤完成每个区域的2D投影三角剖分后,根据4个区域相互重叠的边界点,将三角网格拼合成原始点云的完整网格。
《图9》
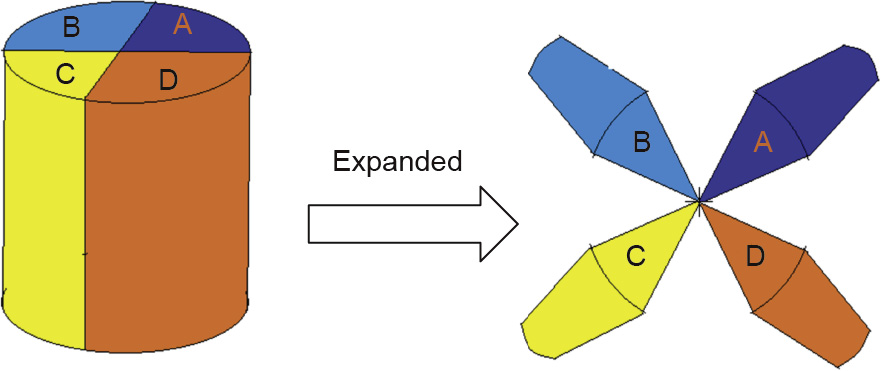
图9. 分割投影示意图。
《6. 实验验证》
6. 实验验证
为了验证混合标定法的有效性和优越性,进行了Tsai两步法、BPN法和混合标定法的对比实验,随后完成测量及重建实验,并讨论和分析了实验结果。
《6.1. 标定实验》
6.1. 标定实验
6.1.1. 数据采集
首先,采集用于平移扫描标定的标定点。将阶梯状标定块放置在平移平台上,并保证线结构光投射在第一个梯面上。由于世界坐标系可以根据标定块的物理尺寸设定,余下的步骤通过编程控制自动完成。实验以左相机采集到的数据为例进行论述,右相机数据的处理过程与之相同。在平移扫描标定中采集的梯面光条图像如图10所示,经过高斯拟合的光条中心提取,共得到5038个有效样本,这些样本用来建立由图像到3D世界的坐标转换。图11所示为在旋转扫描标定中采集到的一组对称图像,由于采集的间隔角度是15°,实验中共采集到12组对称图像,这些数据用来实现旋转扫描的标定。
《图10》
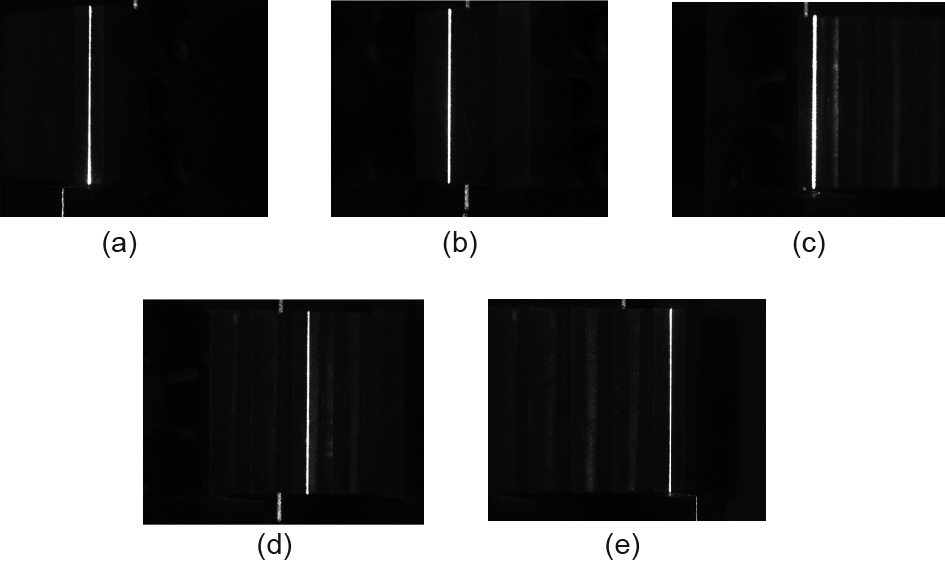
图10. 平移扫描标定图像。(a)第一梯面;(b)第二梯面;(c)第三梯 面;(d)第四梯面。
《图11》
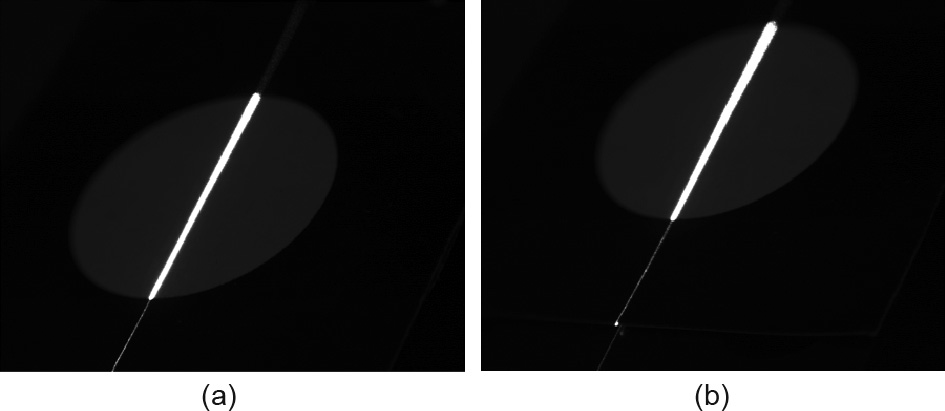
图11. 旋转扫描标定图像。(a)θ = 0°;(b)θ = 180°。
6.1.2. 标定结果
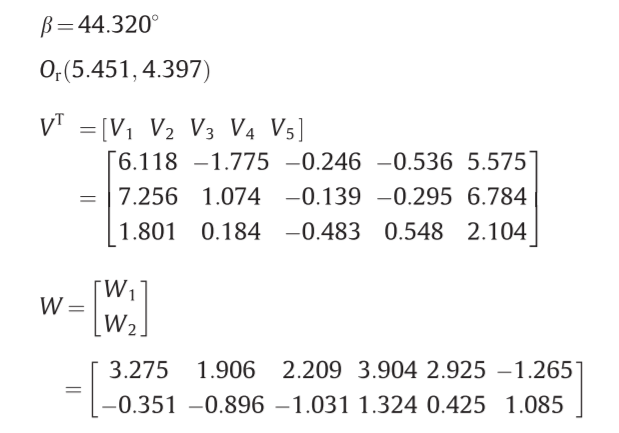
在混合标定法中,由混合标定算法知,基本模型可以由式(21)解出。补偿部分是一个3层的BPN,含有5个隐层结点,终值设为10−4 ,最大训练次数为100。β和Or通过对12组对称图像的计算结果取平均值得到。基本模型和补偿网络的参数的最终计算结果如下:

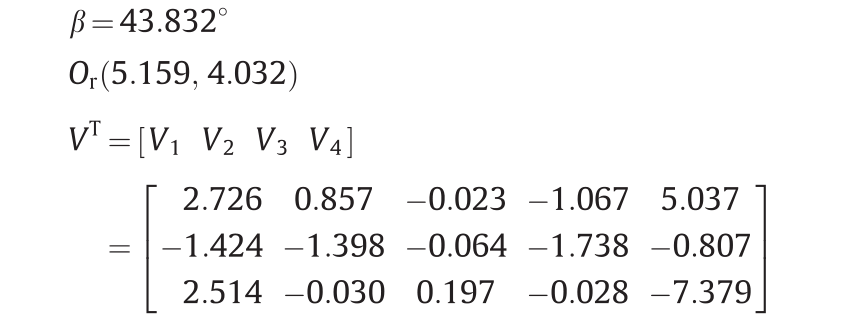
作为对比实验,本节分别基于Tsai 两步法和纯BPN法对系统进行了标定,其中,Tsai 两步法的标定结果如下:

在纯BPN法中,网络的结构与混合算法中的补偿网络一致,具有3层结构和5个隐层结点,终止值同样为10−4 ,最大训练次数为100,最终的网络参数如下:
6.1.3. 实验结论与分析
对阶梯状标定块进行扫描,每个梯面上等间隔取5个点,在不同的标定方法下计算其3D世界坐标系,用于验证标定结果。在本实验中,梯面上的点沿着图像平面的x轴分布,而每个梯面又沿图像平面的y轴分布。除选择标定块上的点以外,增加扫描平台所在平面为参考平面,参考平面低于第一个梯面2mm成像在图像的边缘处,可以用于测试标定结果的泛化能力。计算测试标定点的世界坐标系,并与真实值进行比较得到其误差,误差的分布和统计分别如图12和表1所示。图13展示了神经网络在纯神经网络法和混合标定算法中不同的性能表现。此外,对于旋转扫描,其误差是由图案中选出的端点计算得到的,如图14和表1所示。
《图12》
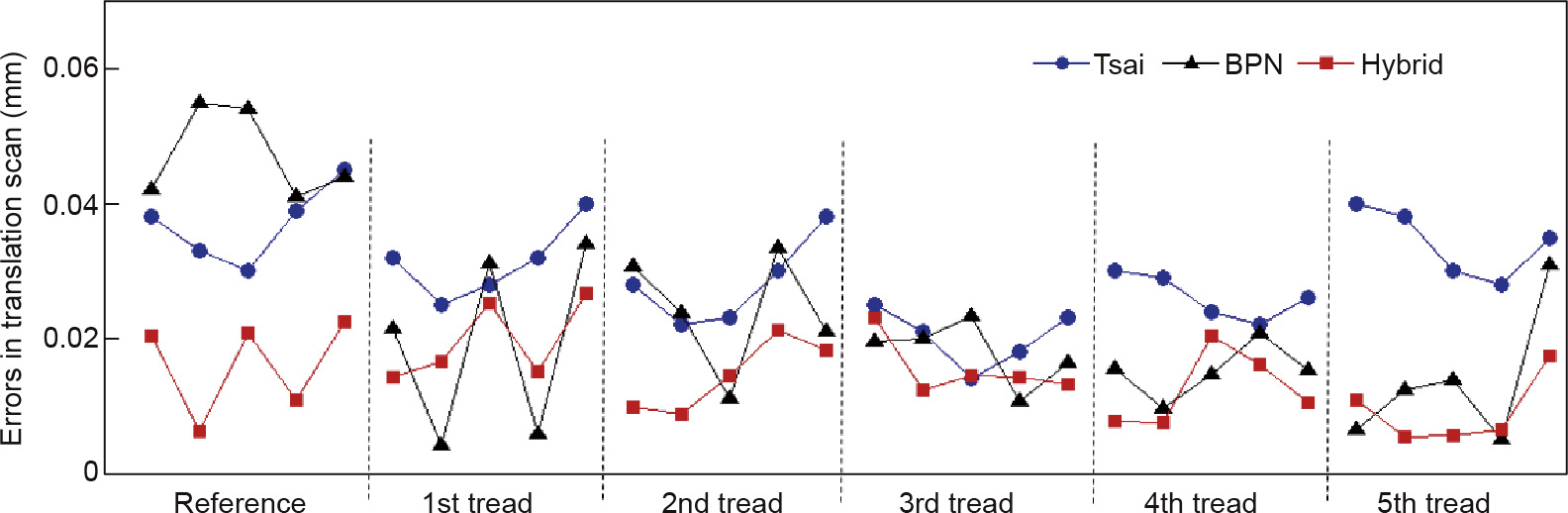
图12. 平移标定误差分布。
《表1》
表1 标定误差统计

T. scan: translation scan; R. scan: rotation scan; RMS: root mean square.
《图13》

图13. 神经网络在(a)BPN和(b)混合标定算法中的性能表现。
《图14》

图14. 旋转标定误差分布。
如图12所示,Tsai两步法具有较稳定和规律性的标定误差。对于整个标定块,靠近中间的梯面上的误差比靠近边缘处的梯面上的误差小;对于每个梯面,靠近中间的点的误差比靠近边缘的点的误差小。参考平面上的点的误差最大,但是依然符合这一规律。Tsai两步法的误差分布与相机畸变大小的分布十分相似,这也说明了Tsai两步法标定误差的来源。Tsai两步法在平移扫描和旋转扫描中的均方根(RNS)误差分别为0.030mm和0.056mm。纯BPN法在梯面上的误差虽然没有规律性,但是整体上比Tsai两步法要小一些。然而,在参考平面上,纯BPN法的误差突然增大,这是由神经网络较弱的泛化能力造成的。因此,BPN在平移扫描和旋转扫描中的均方根误差最终达到了0.027mm和0.060mm。混合标定算法在实验中的表现最好。首先,混合标定算法具有最小的标定误差,在平移扫描和旋转扫描中的RNS分别为0.016mm和0.031mm;其次,由于基本模型的支撑,混合标定算法即使是在参考平面上也获得了较稳定的误差分布,证明其具有较好的泛化能力;再有,理想成分和其余成分的分离,降低了网络规模,间接提高了神经网络的收敛速度,如图13所示,对于混合模型中的神经网络,均方误差(MSE)在第19次训练后就降低到了0.0014612,而对于纯BPN法,MSE在第932次训练完成后为0.0014651。可以看出,混合标定算法MSE的收敛速度比纯BPN法更快。牙模测量的精度要求一般小于0.2mm,因此本文提出的测量方法完全满足此要求。
《6.2. 测量实验》
6.2. 测量实验
图15和图16分别为用于平移和旋转扫描的两种牙模,图17和图18分别展示了它们的测量结果和重建过程。图17(a)是原始点云,共含有37983个点;图17(b)是精简后的点云,包含的点减少到了6218个且较好保留了点云的形态特征;图17(c)展示了2D投影三角剖分生成的网格,3D模型最终在所开发的程序中的渲染效果如图17(d)。图18(a)是旋转扫描得到的原始点云,经过精简后点云的数量从87458减少到6267,如图18(b);图18(c)和(d)分别是三角剖分的网格图和最终的得到的3D重建模型。结果表明本系统可以良好地应用于3D牙齿测量与建模。
《图15》

图15. 平移扫描牙模。
《图16》

图16. 旋转扫描牙模。
《图17》

图17. 平移扫描点云重建过程。(a)原始点云;(b)经降噪和精简后 的点云;(c)Delaunay三角剖分结果;(d)最终的3D重建模型。
《图18》
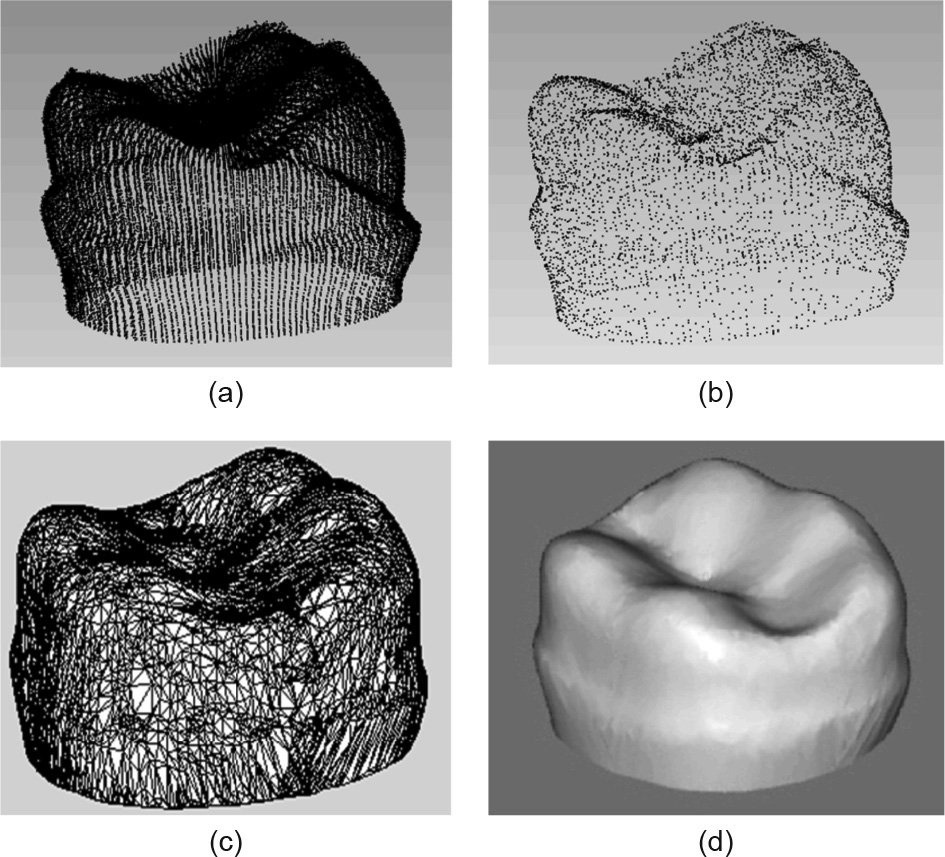
图18. 旋转扫描点云重建过程。(a)原始点云;(b)经降噪和精简后 的点云;(c)Delaunay三角剖分结果;(d)最终的3D重建模型。
《7. 总结》
7. 总结
针对现代医疗中口腔数字化教学评估的迫切需求,本文开发了一种双平台激光扫描仪,相比市面上常用的数字化评估系统,该仪器成本低廉且能适用于各种不同类型牙模的3D轮廓测量。针对系统标定复杂、精度不高的问题,提出了一套高精度的混合标定方法。一方面,通过自动标定方案获取大量精确标定点,只需要放置梯形标定块和粘贴辅助图案即可完成平移扫描和旋转扫描的一体化标定;另一方面,通过混合标定算法,综合了数学建模法和机器学习法的优点,结合了激光扫描的基本模型和补偿网络,避免了数据淹没,实现了高精度标定。实验结果表明本文所提出的混合标定法具有较高的稳定性和较小的误差。利用双平台激光扫描仪对两种典型牙模进行测量,结果表明本系统可有效用于牙模的3D轮廓测量及数字化重建。
双平台激光扫描仪还可应用于不规则面形的3D测量,如雕塑和工艺品的数字化建模、复杂工程零件的3D检测及基于3D打印的快速逆向工程。其不足在于系统体积相对庞大,且扫描过程受限于机械平台。
《致谢》
致谢
作者感谢国家优秀青年科学基金(51722509)、国 家 自 然 科 学 基 金(51575440)、 国 家 重 点 研 发 计 划(2017YFB1104700)和陕西省工业科技攻关项目(2016GY-011)的资助。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Shuming Yang, Xinyu Shi, Guofeng Zhang, and Changshuo Lv declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




