

《1. 引言》
1. 引言
柔性显示被广泛认为是代表未来的显示技术[1‒4]。然而其可靠性明显受到环境中水蒸气和氧气渗透的影响,因为柔性显示制造所采用的荧光材料(如有机发光材料、量子点)通常对环境中的水和氧气敏感[5‒7]。因此,阻隔封装的性能优异与否对于提高器件的稳定性和可靠性至关重要[4]。以最大水蒸气透过率(WVTR)定义,显示器件的水汽阻隔性要求从液晶显示器(LCD)的1×10-2 g∙m-2∙d-1量级延伸到有机发光二极管(OLED)的1×10-6 g∙m-2量级不等[8‒9],而OLED的这种严格的阻隔要求也被称为“超阻隔”[9],这归因于其极低的WVTR(1×10-6 g∙m-2∙d-1)以及渗透达到稳定状态的时间非常长(往往数周甚至数月)[10‒12]。值得注意的是,这种超阻隔渗透率甚至低于MOCON [13]或Technolox [14]等市售仪器的检测下限。测量透过薄膜的低气体渗透率对于中试装置[15]和管道技术[16]开发也很重要。因此,尽管超阻隔渗透的检测很重要,但仍然面临一些巨大的挑战,包括检测限极低以及样品状态调节与测量所需时间长[17]。
目前已经有几种用于水或其他气体渗透检测的方法,包括增重法[18‒19]、钙腐蚀试验[5,10,20]、库仑电荷传感器法[12‒13]和质谱法[11,21‒25]。但增重法的灵敏度低,测量周期也比较长;钙腐蚀测试法[10]对测试装置的制造和操作人员的技能提出了很高的要求,且不能区分水汽和氧气的测试结果;而基于库仑电荷传感器的MOCON等商用仪器的测量周期长、成本高,且无法保证超阻隔样品所要求的测试精度[13]。
得益于四极杆质谱仪(QMS)固有的高灵敏度和高选择性,以及在超高真空下可实现的极低水蒸气背景的前提条件,基于真空质谱技术的WVTR检测有可能具备非常高的灵敏度,用于测量痕量水渗透率[17]。然而截至目前超阻隔渗透测量的长周期问题仍未解决[12]。此外,QMS检测痕量水的可靠性可能会受到两个方面的质疑:①QMS信号的准确性、稳定性和线性度等指标需要使用标准样品/设备对水蒸气测试信号进行校准[24];②由于检测背景的变化可能比渗透信号高几个数量级,因此水渗透率的QMS测量信号可能包含大量的误差[11]。背景变化的原因包括有效泵速的波动[11,24]和累积的内壁水吸附量[11]。如果采用“实时抽气”方案,将渗透气体导入一个被主动泵送的下游腔体,有效泵速随着渗透气体负荷的变化而波动,从而影响平衡分压并最终影响测得的渗透率;相反,在“漏入积累”方案中,渗透气体进入一个封闭的检测腔体会导致腔体内壁气体吸附量的不断变化,这将导致检测到的渗透数值出现严重的误差[11]。为此,“编程阀门质谱”(PVMS)检测方案采用针对下游腔体中渗透气体的动态累积-检测-抽空方法[21],其测量信号独立于泵速或下游封闭腔体的表面吸附,因此可以消除有效泵速波动或下游腔体内壁吸水量不断积累的影响。
在本研究中,PVMS检测方案与预测渗透模型相结合,可以开发更加灵敏、高效且可靠的方法来解决检测下限和测量周期方面的挑战。基于QMS的仪器——被称为“用于超阻隔渗透测量的预测仪器”(predictive instrument for the measurement of ultra-barrier permeation, PI-MUP),能够实现更高的灵敏度、更高的可靠性、更短的测量周期和更高效的样品装载/卸载。该系统具有双重操作模式:静态模式连续记录抽气状态下由于气体渗透所引起的分压增加,旨在测量较高的渗透率并验证传统渗透模型;动态模式基于对渗透信号进行周期性时间积分采样,旨在提高检测超阻隔渗透的灵敏度。此外,使用标准聚合物样品校准系统对水蒸气的灵敏度。本文结合WVTR测量方案开发了渗透率预测模型,实现基于非稳态结果预测稳态渗透率,从而显著缩短测量周期;利用相关实验数据验证了模型的准确性,并保证了其预测能力的可靠性。此外,本文还开发了一种特殊的样品夹具,能够围绕测试样品的密封边缘进行差分抽气,从而简化系统设计,提高样品装载/卸载效率。最后,利用该系统评估了封装OLED器件的Al2O3/SiN叠层的阻隔性能,最终测试结果与标准可靠性老化(RA)测量结果一致。
《2. 方法和设置》
2. 方法和设置
《2.1. 工作原理》
2.1. 工作原理
渗透测量的基本设置如图1所示。详细的测量原理已在文献[21‒22]中进行了解释。简而言之,薄膜样品被安装在两个独立的真空室之间。以远高于其在下腔室中的分压的恒定压力将渗透气体供应到上腔室(pu >> pd)。渗透气体在样品两侧分压梯度的驱动下,渗透流量速率会随着时间的推移而逐渐增加,直至达到稳态水平,其中稳态渗透率数值大小与上腔室压力相关[26]。
(1)
式中,JS是稳态渗透率(mol∙m-2∙s-1);D是扩散系数(m2∙s-1);S是溶解度系数(mol∙m-3∙Torr-1);pu是上游压力(Torr);d是薄膜厚度(m)。乘积DS称为渗透系数。
《图1》
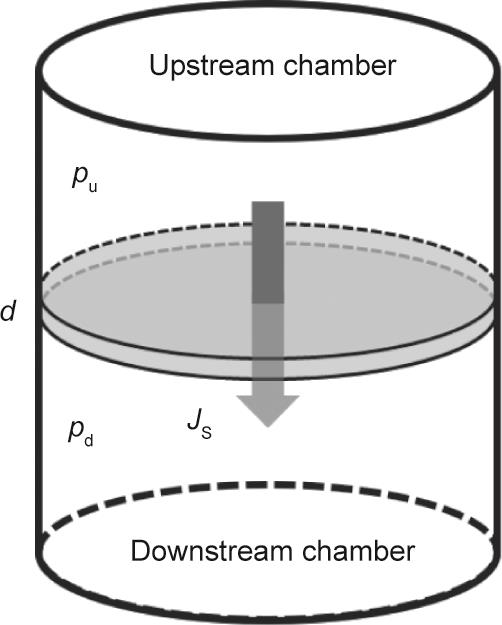
图1 气体渗透测量示意图。
在达到稳定状态之前,作为时间函数的渗透率可以由下式给出[26]:
(2)
式中,J(t)是时间t(s)的渗透率(mol∙m-2∙s-1)。
气体渗透到下腔室会导致下腔室内部气体分压发生变化,这种变化将由QMS检测得到。在本文方法中已经实现了两种测量模式,即静态模式和动态模式,并基于以下假设为每种模式开发了一个模型来阐明QMS记录的分压信号与渗透率之间的关系:①传统亨利定律和菲克定律依然分别适用于气体渗透过薄膜的溶解和扩散过程;②下游的渗透气体遵循理想的气体行为,不考虑气体分子在内腔壁上的吸附效应;③对于静态模式,真空泵组对渗透气体的有效泵速在实验过程中保持一致。
在连续抽气条件下,静态模式[图2(a)]下腔的QMS直接检测渗透气体分压。任何时刻的渗透率[J(t)]都可以与自时间零点(气体引入时刻)以来分压的上升相关联[图2(b)]。根据质量守恒定律,在一段时间(0~t)内由于渗透而引入下游的渗透分子总量是真空泵组抽出与留在腔室中的渗透气体分子的数量之和:
(3)
式中,Seff是有效泵速(m3∙s-1);p0是初始分压(Torr);p是时间t下渗透气体的对应分压(Torr);R是摩尔气体常量(m3∙Torr∙mol-1∙K-1);T是热力学温度(K);V是下游腔室的体积(m3);A是下游腔室的渗透面积样本(m2)。结合方程(2)和方程(3),并求解pt:
(4)
当渗透达到稳定状态时(
(5)
因此,稳态渗透率JS可以根据分压p的稳态值导出:
(6)
为了测量渗透动力学并推导出扩散系数D,本文引入了滞后时间(tlag)[26‒27]。基于渗透分子总量随时间的增加而增加的公式推导,我们得到渗透达到稳态时表现的线性段的横坐标截距即为滞后时间tlag (
(7)
然后可以通过以下方式计算D:
(8)
图2(c)显示为动态模式的基本原理图。该图表示动态模式首先将渗透物累积一段时间(ta),然后将它们释放到一隔离体积中以供QMS检测。隔离检测持续一个检测周期(td),然后在一个抽空周期(te)内抽空整个下腔室。随着渗透的进行不断重复,“积累”—“检测”—“抽空”这3个步骤就形成了一个完整的测量循环。对于每个循环,QMS记录的预期分压变化如图2(d)所示。在“检测”开始时,经过累积的渗透气体分子被QMS检测到从而产生分压跳跃(Δp),而随着渗透接近稳态,分压跳跃的幅度将逐渐增加至稳态水平(ΔpS)状态。检测到的压力跳跃与渗透率之间的关系可以通过建模得到[21]:
(9)
式中,
(10)
因此,稳态渗透率可以从
(11)
与静态模式相比,动态模式的优点是一方面降低了QMS背景噪声并增强了渗透信号,从而提高了测量灵敏度,有效降低了检测下限;另一方面可以消除由于渗透过程中Seff波动引起的误差。
《图2》
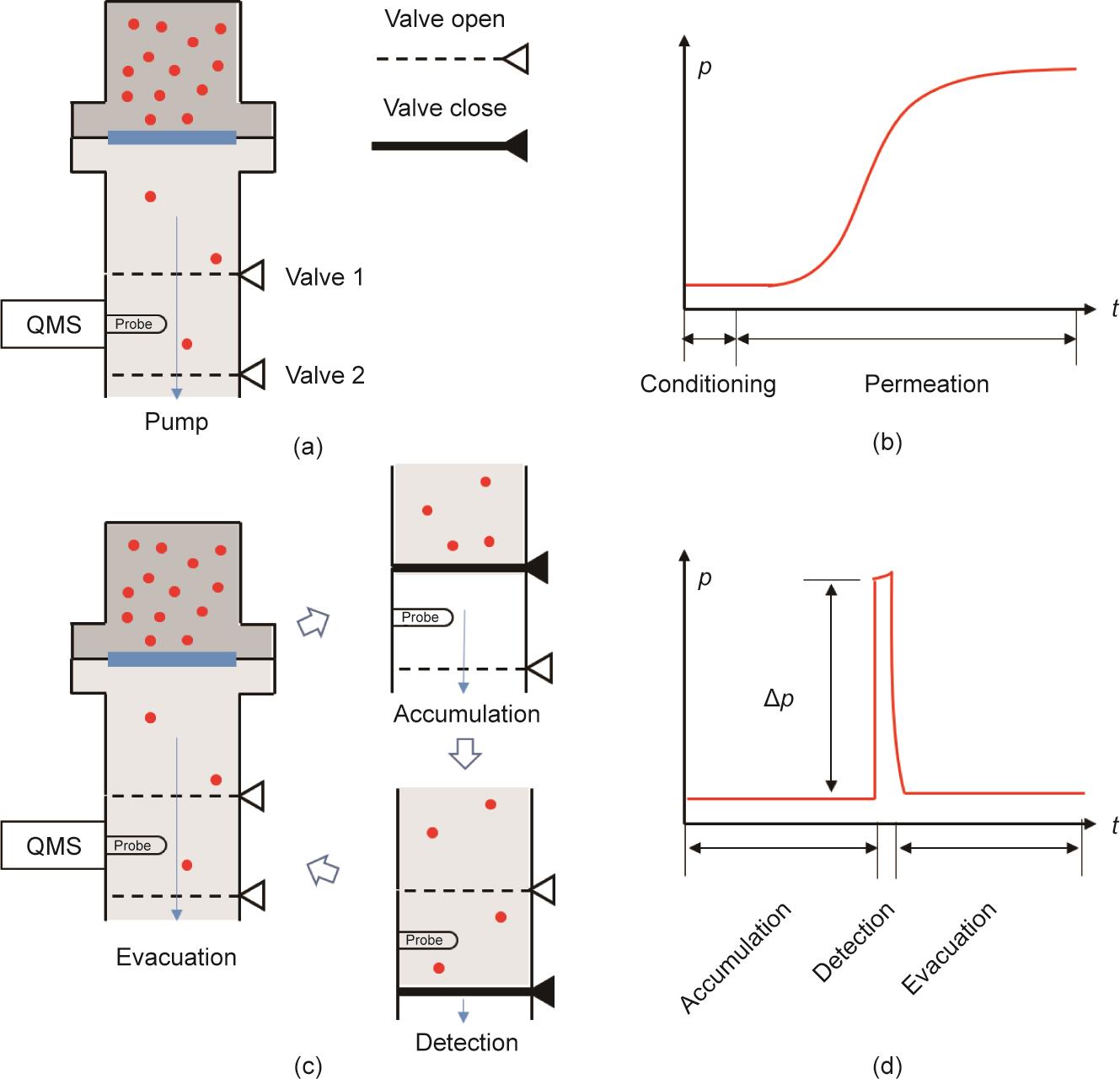
图2 渗透测量原理图。(a)静态模式示意图;(b)静态模式下的渗透信号;(c)基于时间积分的动态测试模式;(d)动态模式下一个周期内的渗透信号。
对于静态和动态两种测量模式,稳态渗透率JS也可以通过拟合方程(4)或方程(9)描述的非稳态分压结果得到。这种曲线拟合方法对于需要长时间测量才能达到稳态的超阻隔薄膜渗透测试而言,有利于预测稳定渗透率,这点会在第3.1节和第3.2节中进行演示。
数据拟合采用的测试模型基于加权最小二乘算法[28],根据五个数据点的平均值对应的信噪比与噪声信号定义了每个数据点的加权因子:
(12)
《2.2. 实验设置》
2.2. 实验设置
图3为PI-MUP系统的图像和示意图,该系统由样品夹具、渗透物引入和渗透物检测等部分组成。
《图3》
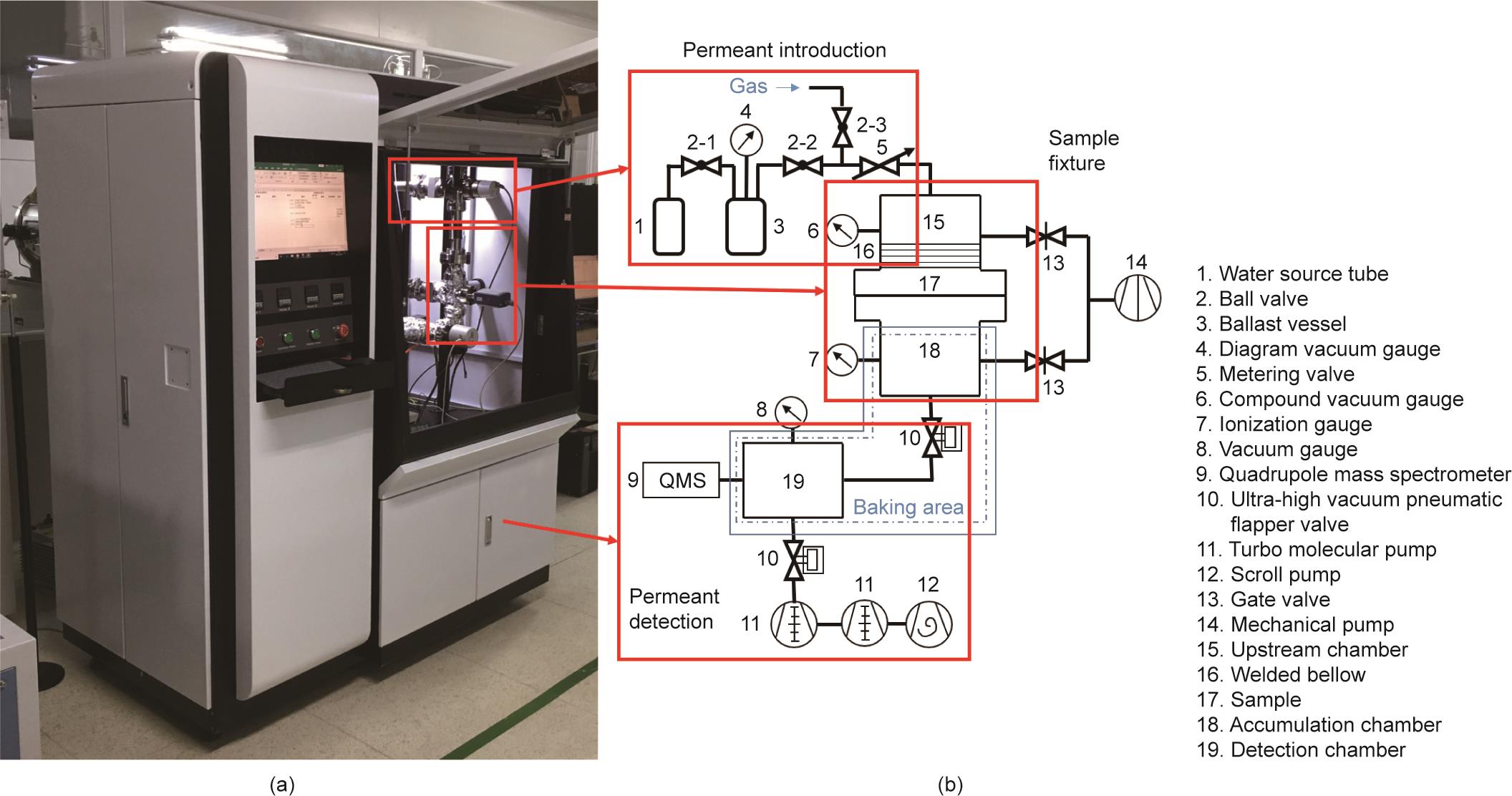
图3 (a)PI-MUP系统图像;(b)PI-MUP系统示意图。
合理的样品夹具设计可用于有效装载/卸载薄膜样品,本文提出的样品夹具设计,其周边有O形圈进行气密密封,两侧区域之间存在气压差。夹具的横截面示意图如图4所示。该夹具中薄膜样品被水平安装在定制的法兰上,薄膜的两侧都密封在带有Viton O形圈的垫圈的法兰上,这定义了一块用于渗透的13.85 cm2的圆形测试区域。样品密封O形圈的外围有另外一个O形圈,它可将样品周边密封处与大气之间进一步隔绝,并允许真空泵组对下腔室进行差分抽气,最大限度地减少由于外界大气泄漏进真空腔体而引起的误差信号。为了确保样品在压力作用下的结构完整性,将一不锈钢金属编织网安装在薄膜样品下方并靠近样品。在卸载样品之前,本文首先用氮气将上腔室和下腔室的压力同时缓慢增加到1个大气压,以避免因突然对样品引入过大的压差而造成的结构性破坏和安全事故[22]。
《图4》
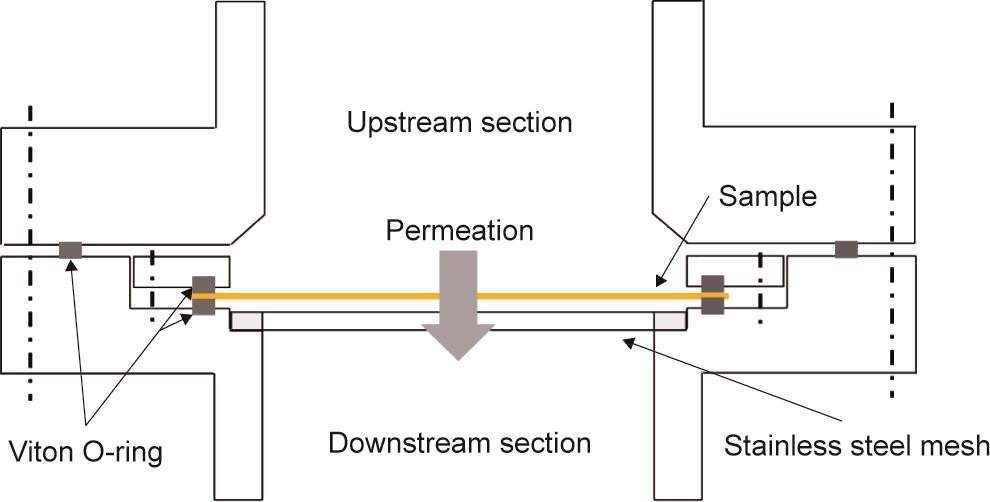
图4 样品夹具的横截面示意图。
上腔室的进气腔负责将不同测试压力的气体或等压水蒸气引入。最初,机械泵组将上腔室抽至低于1×10-3 Torr的初始真空压力水平,然后通过计量阀手动引入渗透气体。通过调节计量阀的流量和上腔室有效泵速之间的平衡来实现低于1×10-1 Torr的测试压力,并保持压力水平的动态稳定;为了降低QMS测量时水蒸气的背景噪声,本文选择的蒸汽源为重水D2O,其渗透特性类似于H2O,但在真空体系中重水的气体信号背景要低得多,重水的蒸汽基于蒸汽压力驱动经由缓冲瓶被驱入进气腔室,其压力由电阻真空规表读取得到。使用缓冲瓶可以将重水源的污染降至最低,同时防止供应管线和上游室中的水蒸气过饱和。上游室的相对湿度水平可以通过测量的分压获得:
(13)
式中,RH是相对湿度(%);
渗透气体检测部分由单独的超高真空(UHV)室组成,用于渗透气体的积累、检测和抽空。不同腔室之间使用气动挡板阀相互连接,通过在LabVIEW®下编程的阀门的打开和关闭组合实现动态测量方案。蓄积室和检测室的腔室压力用离子计(IG)监测。QMS(Hiden model HPR20)安装在检测室上,用于检测渗透物的分压。在渗透测量之前,UHV腔室被抽真空至低于1×10-8 Torr的基础压力水平(这通常是在120 ℃下连续抽真空烘烤时间大于8 h后实现的)。
《2.3. 渗透率校准》
2.3. 渗透率校准
PI-MUP系统在室温下的渗透率用Teonex Q5的标准聚萘二甲酸乙二醇酯(PEN)样品校准,其厚度为100 µm,本文在静态和动态测量模式下对该PEN样品的WVTR进行了测试。对于静态测量,稳态渗透率(JS)用公式(6)计算,有效泵速(Seff)估计为122 L∙s-1。在测试PEN的WVTR之前,首先通过测试氦的渗透来对设备进行检漏,这是因为氦是一种具有快速渗透动力学的惰性气体,十分适合用来检漏。在施加不同的上游压力(pu)的情况下,借由下述步骤获得了一系列稳态渗透率(JS)。首先,从下腔室的分压变化中提取每个测量周期的分压跃变(Δp),在QMS上监测氦气和水蒸气作为离子信号,得到分别来自质量数4(He+)信号峰和质量数20(D2O+)信号峰。接下来,获得因渗透引起的分压跳跃的稳态值(ΔpS),并将其与因背景引起的分压跳跃(Δp0)分离。然后基于对下腔室体积的估计(V = 8.52×10-4 m3),稳态渗透率(JS)经由方程(11)计算得到。最后,将测量的JS与现有标准阻隔样品渗透率数据进行对比,这些样品数据一方面来自文献[29](氦气为 2.79×10-2 cm3∙m-2∙d-1),一方面来自MOCON在商业仪器上的测量(0.74±0.2 g∙m-2∙d-1 for WVTR)上述数据均遵循美国国家标准和技术协会(NIST)标准[13,30]。
由于目前没有用于校准的标准超阻隔膜,因此为了校准PI-MUP系统,本文将每个实验实际测量获得的JS与每个上游压力计算得到的标准渗透率(pu)进行比较,其中每个“标准渗透率”都是以氦气或水蒸气作为标准气体得到的渗透率数据进行线性外推得到的,这将在第3.2节中讨论。
《3. 结果与讨论》
3. 结果与讨论
《3.1. 静态测量》
3.1. 静态测量
图5(a)显示了使用静态模式在25 ℃/100% RH下测试的PEN的WVTR。将水蒸气引入上腔室后,上腔室压力(pu)立即在约24 Torr处饱和(25 ℃环境条件下饱和水蒸汽压),而下腔室分压(pD2O)在逐渐接近稳态水平之前保持了一段时间的低背景,这是由于在渗透前期,需要一段时间在薄膜内部建立渗透浓度梯度导致。相关测试的重复性通过对同一批次的两个不同PEN样品(S1和S2)的多次测试得到确认,每次测试的WVTR则是通过对在15~20 h的稳定状态期间记录的渗透率值取平均值来确定的。测试过程中对样品S1进行三个测试并取平均值,最终确定PEN的WVTR为5.30×10-2 g∙m-2∙d-1,标准偏差为1.23%。考虑到与MOCON仪器测得的0.74 g∙m-2∙d-1标准值[13]相比有一定的数据偏离,因此本文在PI-MUP系统上测量的WVTR使用了13.96的线性校正因子进行校准,得到的最终不确定性为1.25%。此方法的最终极限灵敏度与最低测量下限可以做出如下推算:在渗透开始之前,QMS背景噪声信号约为5.36×10-12 Torr,以可靠的信噪比为1进行推算,对应的WVTR检测下限约为6.13×10-4 g∙m-2∙d-1。这个下限取决于本文中所涉及的真空系统的极限真空度,一般认为极限真空度越低,越能够实现高灵敏度的WVTR测量。
《图5》
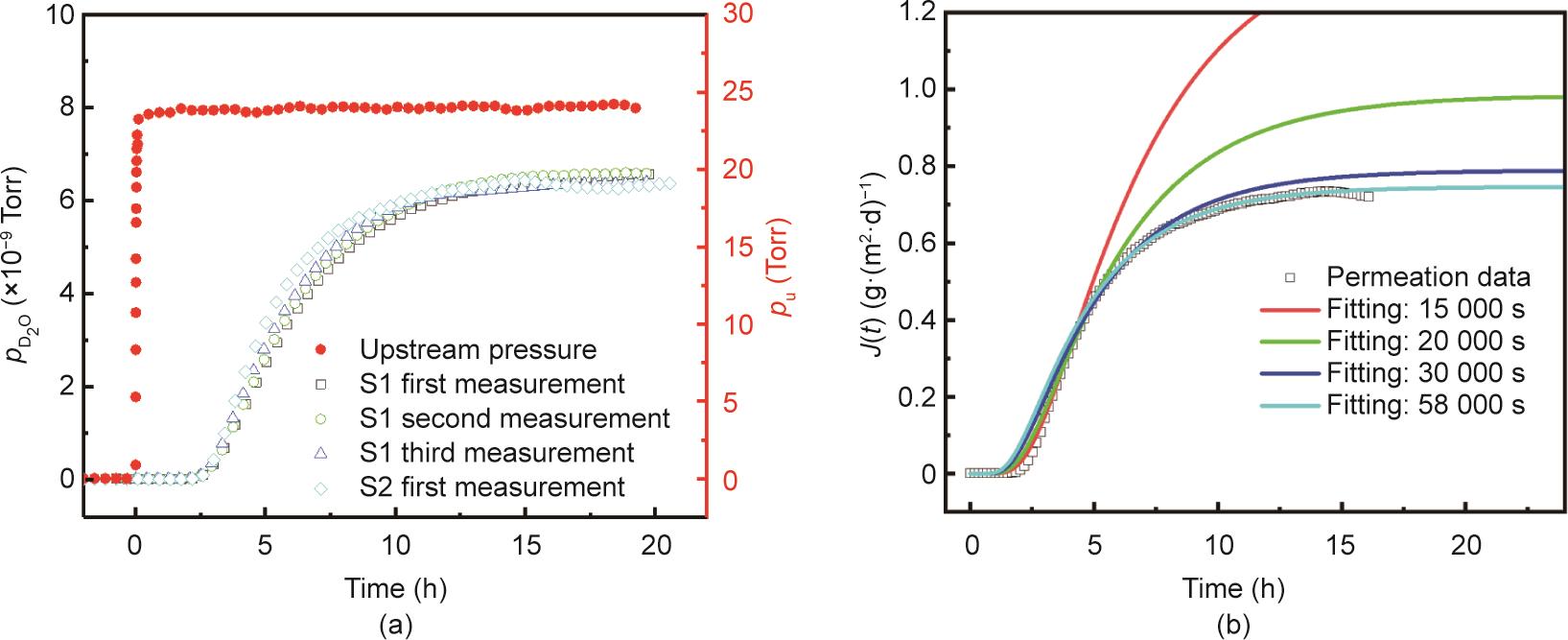
图5 在25 °C/100% RH下使用静态模式测试的水蒸气(D2O)透过PEN的渗透数据。(a)水蒸气下游分压与上游压力(红色)关于时间的相关变化;(b)渗透与时间的拟合渗透模型。
上述渗透实验的结果可用于评估第2.1节中开发的渗透模型的准确性。如图5(b)所示,模型对测试数据的准确性受拟合选择的数据范围的影响。一般来说,拟合的数据越少,与模型的偏差越大,因此在0~30 000 s的数据范围内(总数据范围的初始50%),结果显示没有出现显著偏差。
本文提出的渗透模型允许从非稳态结果预测稳态渗透结果,如表1所示为基于初始30 000 s的非稳态数据,预测得到的稳态渗透率(Js)和扩散系数(D),其预测数值大小均接近稳态测量记录的相应值[31]。
《表1》
表1 使用静态模式在25 °C/100% RH下的测量和预测渗透特性的比较
| Data range (s) | Measured (g∙m-2∙d-1) | Forecasted (g∙m-2∙d-1) | Relative error | Measured (× 10‒13 m2∙s-1) | Forecasted (× 10‒13 m2∙s-1) | |
|---|---|---|---|---|---|---|
| 0‒58 000 | 0.733 | 0.746 | 1.83% | 0.94 | 0.92 | 0.9945 |
| 0‒30 000 | 0.733 | 0.764 | 7.64% | 0.94 | 0.85 | 0.9932 |
| 0‒20 000 | 0.733 | 0.985 | 34.32% | 0.94 | 0.73 | 0.9943 |
| 0‒15 000 | 0.733 | 1.410 | 92.94% | 0.94 | 0.62 | 0.9943 |
《3.2. 动态测量》
3.2. 动态测量
采用动态法进行了氦气通过PEN的渗透试验,设置每个动态循环抽真空时间为120 s,累积时间为20 s,检测时间为8 s(指定为120 s‒20 s‒8 s)。图6(a)展示了一个典型循环的实际测量氦分压变化和提取的分压跃变Δp,分压的这种变化与图2(d)中概述的预期趋势一致。
《图6》

图6 使用动态模式测试的氦气渗透PEN数据,抽真空时间为120 s,累积时间为20 s,每个测试周期的检测时间为8 s。(a)单个代表性周期中分压的变化和相应的Δp;(b)实验渗透率与线性外推标准渗透率的比较。
按照上述步骤,稳态氦渗透率(JS)为施加的上游压力(pu)的函数,其中,JS使用方程 (9)从ΔpS推导获得。图6(b)显示了实验获得的JS与pu的对比,表现了在1个大气压条件下测试的标准渗透率,并将其进行线性外推得到其他压力条件下的标准渗透率。由图可知JS和pu之间存在线性关系,这表明氦气在PEN中的渗透系数与施加的上游压力无关。通过计算线性外推标准渗透率的斜率与从实验测量的线性斜率之间的比值,可以获得0.879的校正因子,这表明与压力无关的氦渗透系数与没有非线性相互作用的间隙扩散机制一致[32],这也为从1个大气压开始线性外推标准渗透率的有效性提供了依据[21]。
在25 ℃/62.5% RH下采用动态法测试水蒸气通过PEN的渗透率,循环时间设置为 300 s‒150 s‒10 s。图7(a)显示在整个测试过程中多个测量周期下QMS水蒸气分压的变化,图7(b)则显示了其中两个特定循环的数值变化。如图7(c)所示为通过提取每个测量周期的分压跃变Δp并绘制其与时间的关系图。随着渗透的进行,Δp的值逐渐增加,直到在ΔpS达到稳态水平后计算得到稳态渗透率JS。与静态测试模式类似,动态测试方法的渗透模型的准确性受到为拟合选择的非稳态渗透数据范围的影响。如图7(d)所示,前15 000 s(总数据范围的初始35%)的选择没有观察到显著偏差。稳态渗透率与渗透模型偏离的原因可能是在渗透接近稳态的后期,水与PEN内部之间存在的非线性相互作用。
《图7》
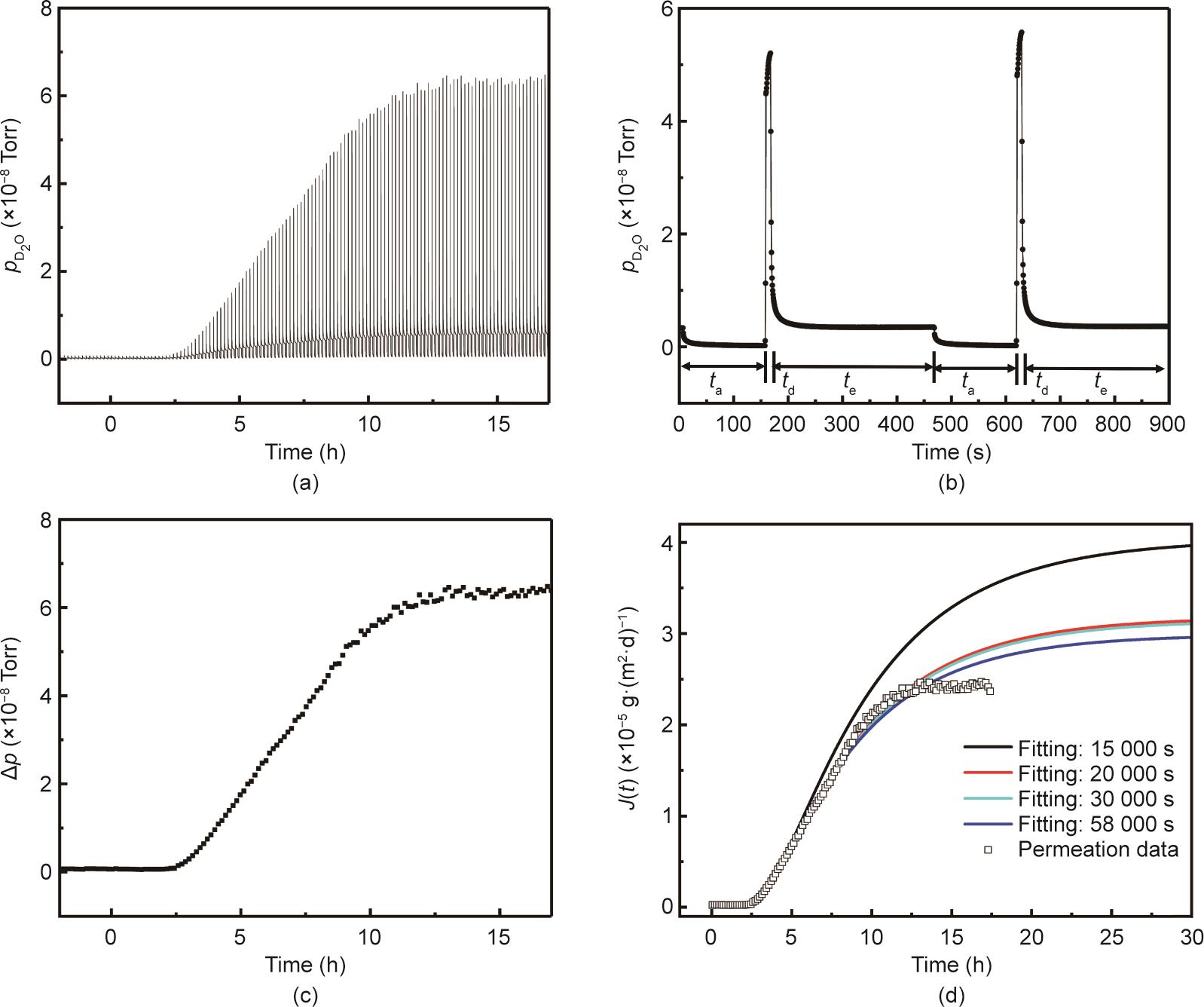
图7 在25 °C/62.5% RH下使用动态模式测试水蒸气(D2O)对PEN的渗透,每个测试周期中抽真空时间为300 s,累积时间为150 s,检测时间为10 s。(a)整个测试期间分压的变化;(b)在单个代表性循环中分压和相应Δp的变化;(c)整个测试期间由于渗透而增加的Δp;(d)渗透与时间的拟合渗透模型。
实验获得的JS作为上游压力pu的函数如图8所示。JS与pu可以拟合为幂函数
《图8》
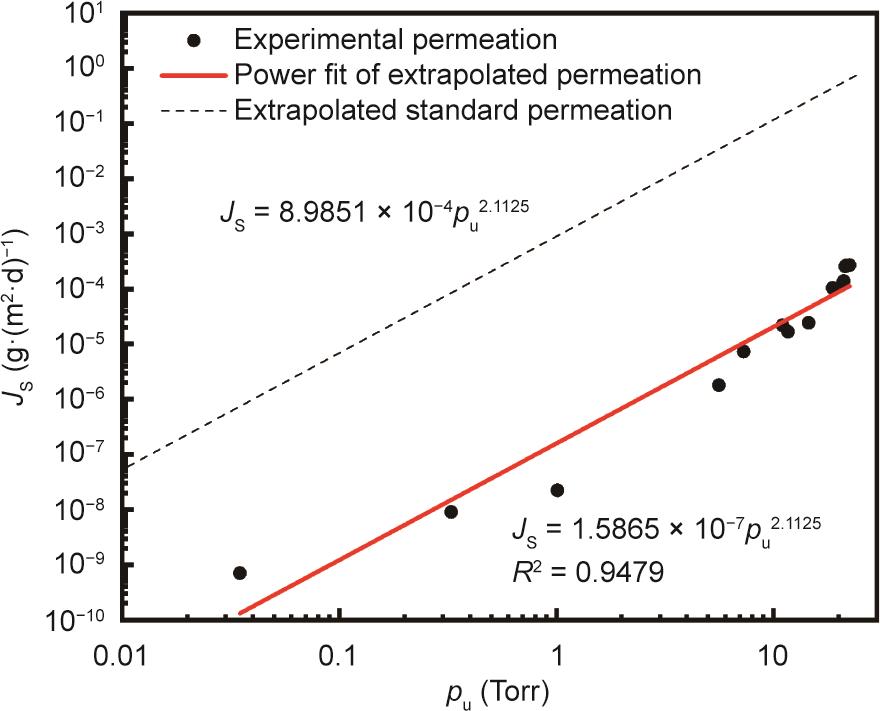
图8 水蒸气透过PEN的实验渗透数据与标准渗透曲线.
《图9》
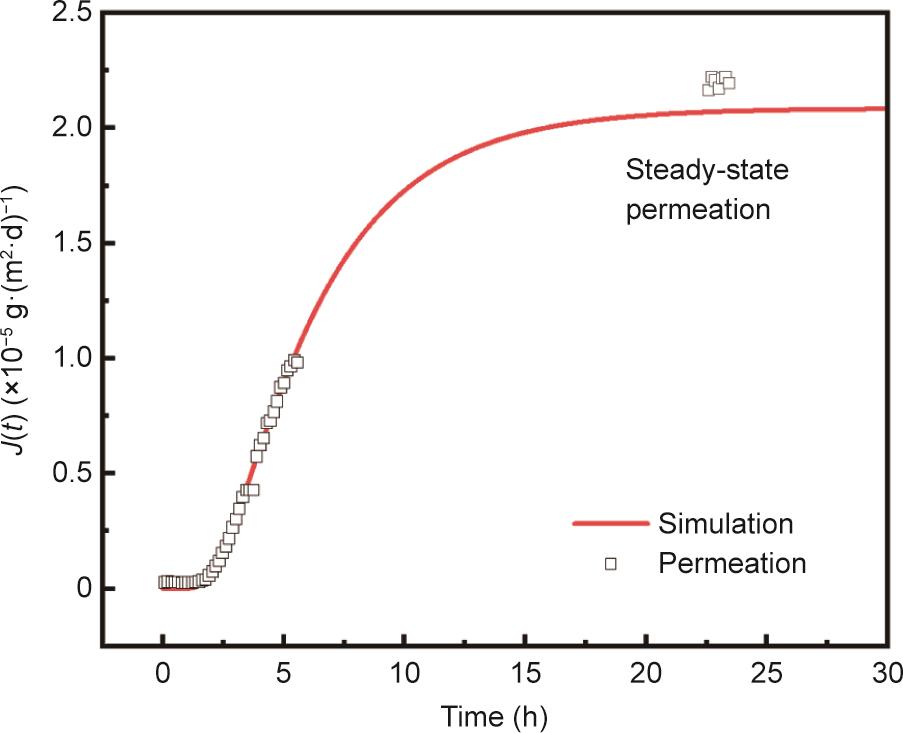
图9 在25 °C/46% RH下使用动态模式(未校准)预测的PEN稳态WVTR图。
J(t)的动态测试结果也已用于评估在第2.1节中为动态方案开发的渗透模型的准确性和预测能力。通过将记录的J(t)数据拟合到式(2)和式(7)中概述的模型,以及通过将测量的J结果与基于初始20 000 s的模型预测的结果进行比较,来评估已记录的测试数据的准确性。
如图9所示,在初始5.6 h记录的非稳态数据与R2 = 0.9977的模型拟合良好;预测的稳态WVTR为2.12×10-5 g∙m-2∙d-1(未校准),也与大约22.5 h的测试周期内获得的实验值[2.22×10-5 g∙m-2∙d-1(未校准)]非常吻合。表2为施加不同上游压力得到的渗透数据之间的比较。其中非稳态数据与模型拟合良好,拟合JS与实测数据差异在37%以内。表2中所列相对误差的变化可能是由于腔室所有吸附的差异造成的。考虑到室壁吸附以及任何非线性渗透效应都会影响最终渗透模型的可靠性,本文中的动态渗透测试模型目前存在进一步改进的空间,尽管如此,通过应用现有的稳态预测模型,WVTR测量时间也被证明能够缩短约75%的测量周期。
《表2》
表2 动态模式下不同上游压力下测量和预测稳态渗透率的比较(预测基于初始20 000 s的非稳态数据)
| RH (%) | Calibrated | Measured | Forecasted | Relative error | ||
|---|---|---|---|---|---|---|
| 5.61 | 23.4 | 0.034 | 1.98 × 10-6 | 1.89 × 10-6 | 4.87% | 0.9436 |
| 7.30 | 30.4 | 0.059 | 7.55 × 10-6 | 7.04 × 10-6 | 6.77% | 0.9910 |
| 11.03 | 46.0 | 0.143 | 2.22 × 10-5 | 2.09 × 10-5 | 5.93% | 0.9958 |
| 14.54 | 60.6 | 0.256 | 2.45 × 10-5 | 2.91 × 10-5 | 18.80% | 0.9815 |
| 18.75 | 78.1 | 0.439 | 1.05 × 10-4 | 1.43 × 10-4 | 36.38% | 0.9993 |
| 21.46 | 89.4 | 0.584 | 2.58 × 10-4 | 3.39 × 10-4 | 31.30% | 0.9992 |
| 22.43 | 93.5 | 0.641 | 2.76 × 10-4 | 3.41 × 10-4 | 23.33% | 0.9995 |
《3.3. OLED器件的应用》
3.3. OLED器件的应用
利用PI-MUP系统,我们对封装好的OLED器件的阻隔性能进行了测试,获得了OLED上的Al2O3/SiN双层复合封装膜的WVTR。测试结果与标准RA测试的结果进行了对比。在以PEN为基板的OLED上,复合封装膜底层的SiN的制备采用了等离子体增强化学气相沉积(PE-CVD),顶层的Al2O3的制备则采用了原子层沉积(ALD)[35‒36]。SiN和Al2O3层的厚度分别为870 nm和50 nm。图10(a)和(b)分别显示了在25 ℃/100% RH下由于稳态水蒸气在(D2O)渗透通过PEN与复合膜的QMS信号,其中PEN设置为参比样品。复合膜的渗透过程需要约5 d才能达到稳态,WVTR计算为7.29×10-5 g∙m-2∙d-1,比PEN基材低4个数量级(7.4×10-1 g∙m-2∙d-1)。此外,利用光学显微成像监测了OLED器件在RA测试过程中所采用的60 ℃/90% RH的高温高湿条件下的结构转变过程,如图10(c)所示。经过复合膜封装的OLED器件在高温高湿的恶劣环境下的寿命超过615 h,对应25 °C/100% RH环境下的最大WVTR值位于10-5~10-6 g∙m-2∙d-1范围(根据OLED性能要求做出的推算)[37‒38]。因此,PI-MUP渗透测试与RA测试所获得的WVTR结果基本相符。此外,我们也在量子点光致发光器件上开发了复合封装膜[图10(d)],以防止水和氧气渗透进入量子点薄膜,从而显著提升器件的可靠性。因此,PI-MUP系统的WVTR测试结果可以指导柔性显示器件封装层的设计和优化。
《图10》
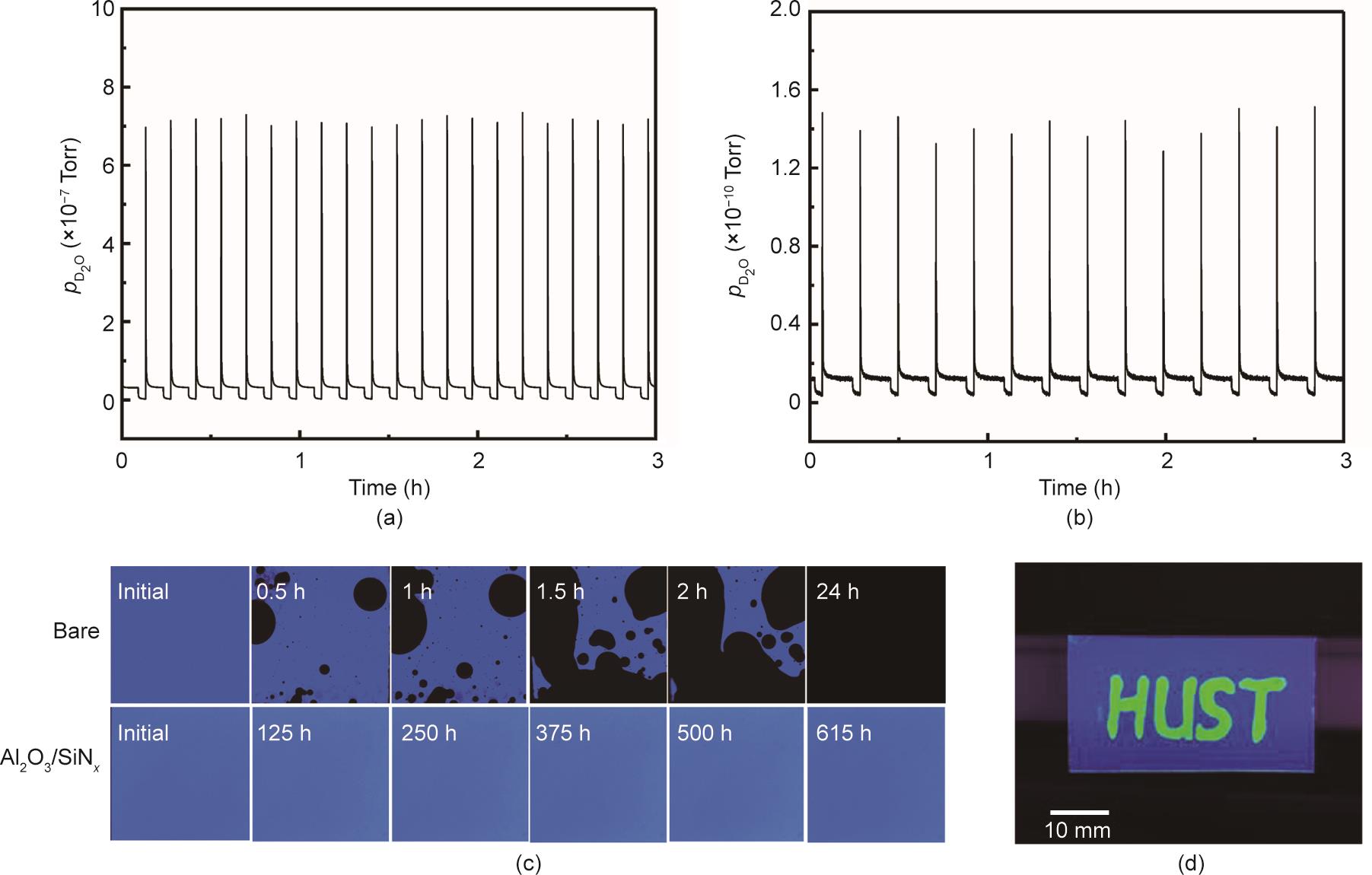
图10 在25 °C/100% RH下使用动态模式测试水蒸气(D2O)透过PEN(a)和复合封装膜(b)的稳态渗透数据;(c)60 °C/90% RH的加速老化环境下,带有和没有复合封装膜的OLED在不同时间的光学显微照片;(d)具有复合封装膜的量子点光致发光器件。
《4. 结论》
4. 结论
本文开发了一种用于灵敏和快速地测量水蒸气渗透的预测工具。它将预测渗透模型集成到高灵敏度QMS分析设备中。通过采用基于时间积分的动态模式进行测试,提高了WVTR测量灵敏度与测量下限;经过校准后,最终WVTR的检测下限在10-7 g∙m-2∙d-1量级,满足了超高阻隔渗透测量的灵敏度要求。此外,本文提出的预测渗透模型可以根据非稳态结果预测稳态渗透率,从而将测量周期缩短约75%。本文还介绍了此测量方法在高阻隔封装OLED器件渗透测试中的实际应用,其结果指标与RA测试相当。基于这样的性能突破,本文目前的方法和仪器能够为有效检测超阻隔水蒸气渗透提供了有力支持。此外,由于可以灵敏、准确和快速地测量微量气体/蒸汽的渗透,本文提出的方法可以推广至其他各种工程应用中,包括聚变反应堆中的氢同位素渗透检测、清洁能源燃料箱中的氢泄漏检测以及太空环境下机械结构或电子封装的密封性的评估等。











 京公网安备 11010502051620号
京公网安备 11010502051620号




