
《1、 引言》
1、 引言
振动控制(有时也被理解为减振或隔振)涵盖了一系列针对保护主结构从而使系统免受外部动态激励的影响的技术。其被广泛地应用于航天、机械和土木等相关结构中,包含噪声控制[ 1]、车辆悬挂减振[ 2~ 3]、卫星振动控制[ 4]、大型土木结构在强台风和强地震作用下的减振保护[ 5]等。现有的振动控制技术大致上可被分成三类:被动式控制、半主动式控制和主动式控制[ 6],而三者各有优劣。其中被动控制不需要任何外部反馈系统和能量供给,仅仅通过改变结构的固有性质或消耗系统的动能而达到振动控制效果。相比之下,主动控制一般通过施加基于反馈信号的最优主动控制力而达到最优的控制效果。但巨大的能量需求很大程度上限制了其在大型结构中的应用(如土木基础设施结构),此问题在偏远地区能量供给不便的情况下显得尤为突出。半主动控制则介于被动控制和主动控制之间。它在相较主动控制耗能更少的情况下,能够取得一个相较被动控制更好的控制效果。 表1总结了针对上述三种振动控制技术的一些既有观念。
《表1》
表1 不同种类振动控制技术之间的比较
| Category | Control performance | Feedback system required | Power consumption | ||
|---|---|---|---|---|---|
| Conventional | → | Emerging | |||
| Passive | Low | No | Zero | → | Negative |
| Semi-active | Medium | Yes | Medium | → | Self-powered |
| Active | High | Yes | High | → | ? |
尽管如此,近年来出现的一些新兴技术使得上述既有观念产生了一定变化。例如,被动控制和半主动控制的能耗问题,就因为一些新型基于振动的能量采集技术的出现而被重新定义。能够同时提供阻尼并进行能量采集的双功能阻尼器的出现,使得原本的被动阻尼器摇身一变成为能量回收装置(即从零能耗变成了负能耗),其中的电磁装置实现了动能向电能的转化,而电能则可被电容或可充电电池存储起来以供未来之需[ 7? 8]。鉴于电磁阻尼器已经在振动控制装置中得到了广泛应用(如电磁质量阻尼器或驱动系统[ 9? 10]、电磁分流阻尼器[ 11]、电磁惯质阻尼器[ 12? 13]),这种能量采集范式可在多种应用中得到实现。例如,通过将调谐质量阻尼器(TMD)与能量采集阻尼器结合而得到的能量回收调谐质量阻尼器已被成功研发[ 14]。Zhang等[ 15]回顾了有关具备能量回收功能的减振器的一些最新进展。电动汽车中具备能量回收功能的刹车系统,也是此类可做能量采集的被动阻尼器研究大类中的一个重要科研方向[ 16? 19]。
许多科研人员同时也开始了有关自供能半主动振动控制的探索。例如,Cho等[ 20]提出了一种结合了磁流变(MR)阻尼器和电磁感应装置的混合系统;其中后者可为前者供能。这种自供能的半主动控制系统也在实验室和足尺的拉索上进行了测试[ 21]。Chen和Liao [ 22]又在此原型的基础上通过结合电磁组件和磁流变组件而进一步改进了该装置,并对其进行了实验验证。
相比之下,自供能主动式振动控制设备的研发,则是一项更具颠覆性但也更有挑战性的任务。对此,既有的研究主要聚焦在两种策略上。第一种策略是通过利用两套独立的单元来分别实现能量采集和主动控制功能,其想法与上述自供能半主动控制方案类似。例如,Scruggs和Iwan [ 23]提出了一种能量回收控制器网络的方法,将一个位置上采集到的能量应用到另一个位置的振动控制当中。Suda等[ 24]通过在主悬挂与次悬挂中分别安装一个能量采集电机与一个主动控制器,来实现一套自供能主动车辆隔振系统。第二种策略则是通过让控制装置在被动(能量采集)和主动(能量消耗)之间轮流运作而达到目的。Nakano和Suda [ 25]继而依照此策略将文献[ 24]中的同一设备应用到了卡车驾驶室的隔振中。Tang和Zuo [ 26]通过主动调谐质量阻尼器实现了部分线性二次高斯(clipped LQG)控制。但是上述两种策略中的主动控制仍依赖于外部电源,否则主动控制力仍将无法完全实现。因此,上述两种策略还不能实现真正意义上的自供能主动控制效果。
所以一种真正的自供能主动振动控制系统的可行性仍有待论证。据此,让我们首先审视一下主动振动控制系统中的能量流动。 图1展示了一个典型的主动隔振系统中,控制器的力与速度的关系曲线。当曲线落于一三象限内,则主动控制器的瞬时输出功率为正(即做能量采集),而若曲线在二四象限内,则瞬时输出功率为负(即做能量消耗)。因此,如果一三象限内被包络的面积大于二四象限,则净能量输出应当为正( 图1)。那么我们能否将这个结论推广到更普遍的振动控制中呢?值得注意的是,主动式振动控制是结构控制技术中的一个特殊子集,最终目标是最小化主结构的动能。尽管我们可以允许某一时刻的瞬态能量流动为负,但是为了避免系统失稳,应避免整体向主结构净注能情况的发生(即负能量输出)。因此理论上讲,通过将主动控制中的瞬态能量存储起来并反馈到之后的振动周期中,是可以实现自控能主动控制的。
《图1》
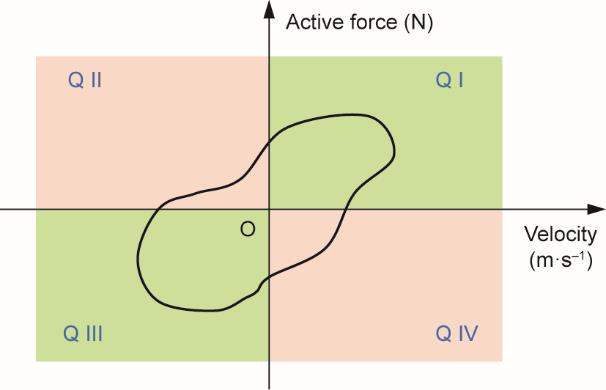
图1 主动隔振系统中典型的力-速度曲线。Q:象限。
上述这一概念迄今仍未完全实现,且实际过程中可能会比上述理想情况更加复杂也更具挑战性。因此本文首次提出并探索了一种新型自供能主动式振动控制系统;并对其结构拓扑、工作原理与系统的能量分析等方面进行了介绍与讨论。此外,所提出的系统也被应用于一套主动隔振台中来实现经典的天钩控制算法。其主动控制表现与自供能特性通过数值和实验研究都得到了成功验证。
《2、 自功能主动控制器的设计》
2、 自功能主动控制器的设计
《2.1 系统拓扑结构》
2.1 系统拓扑结构
图2展示了所提出的自供能主动控制器被放置到一个受到地动激励的单自由度隔振系统中的情况。此系统主要包含四个模块:电磁控制器(EM Actuator)模块、连接可充电电池的H桥电路模块、单片机(MCU)模块和传感系统模块。
《图2》

图2 自供能主动控制系统的原理图。 m h:结构质量; k h:结构刚度; c h:结构阻尼系数;Acc:加速度;Vel:速度; F ctrl:控制力;A和B:电磁装置的两个连接端口;M 1~M 4:金属氧化物半导体场效应晶体管(MOSFET);Arduino:开源MCU平台(
其中电磁控制器模块能够提供与大型结构相匹配的控制力[ 27? 28]。在电路中,电磁控制器用一个电动势(EMF)与线圈所带来的内阻( R 0)与内感( L 0)来表示。电磁控制器两端的相对运动会产生电动势,而流经其中的电流会产生控制力( F ctrl):
(1)
式中, K em是电机系数,它仅与电磁控制器本身的性质有关;
单片机模块则会基于检测到的信号决定目标控制力的大小,将其转化成脉冲宽度调制(PWM)信号并对H桥电路进行操控。在本文中,开源单片机系统(Arduino Uno)被用来实现上述整合功能,包括数据检测与采集、数据处理、控制算法的执行及数据输出。接收到的模拟信号(本文中包括绝对与相对速度),会通过板载数模转换器进行数字化采样。而控制算法将通过Arduino自带的基于C语言的集成开发环境(IDE)提前上传到单片机中。该控制算法将基于采集信号进一步决定PWM信号的占空比。
H桥电路因为允许能量的双向流动,常常作为一种典型的开关型整流器[ 29]。尽管H桥传统上会被用在电机驱动中,但最近在能量采集应用中吸引了更多关注[ 30]。Liu等[ 31]利用PWM控制下的H桥电路来提高压电材料的能量采集效率。一种类似的H桥电路也被用来调谐电磁能量采集设备以提高采集效率[ 32? 33]。Hsieh等[ 29]将H桥电路应用到可能量回收的隔振系统中,用来模拟不同的电阻阻值或实现半主动天钩控制。
本文中H桥电路既是控制器,同时又是能量采集电路。如 图2所示,H桥电路作为电磁控制器模块与可充电电池之间的接口来控制电池的充放电。H桥电路由四个MOSFET组成。两个对角的MOSFET成为一组,分别被标记成M 1-M 4和M 2-M 3,然后由Sig 1和Sig 2分别进行控制,从而使两个对角组同时进行高频的(通常从几千赫兹起)开关过程。本文所使用的是四个N型MOSFET。N型MOSFET只在其门节点上所施加的PWM信号为高电平(超过阈值电压 V GS)时才被接通。考虑到 图2中A、B两点的电压一直在波动,高位MOSFET(即M 1和M 3)需要额外的自举电路(bootstrap circuit)或一个门驱动去实现相应的控制。
可充电电池在这里面扮演一个集“能量储存”与“能量供应”于一体的双重角色。除了可充电电池,超级电容也经常被应用于能量采集当中。但是鉴于可充电电池相比超级电容电压更加稳定,所以在本文稍后的概念验证测试中最终选用了镍氢电池作为能量单元。
《2.2 系统原理》
2.2 系统原理
为避免短路对系统造成损伤,就要求对角组开关应交替进行“开”和“关”,这意味着Sig 1与Sig 2不能同时为高电平。因此Sig 1和Sig 2的占空比应当大致满足 D 1 + D 2 = 1的关系。如果PWM信号的开关周期为 T PWM = 1/ f PWM(其中, f PWM是PWM频率),那么M 1和M 4会在 t 1 = T PWM? D 1区间内接通(即Sig 1为高电平),而M 2和M 3会被关闭(即Sig 2为低电平)。此时,A接口连接在了电源的正极,而B接口接地。当控制信号在同一周期内变换之后,在周期内剩余时间 t 2 = T PWM?(1 - D 1),Sig 1变为低电平而Sig 2转为高电平。
如果假设流经控制器和电感的电流( i)自右向左为正,则在每一个开关周期内基于基尔霍夫电压定律都有如下的关系:
(2)
(3)
式中, V m是瞬时电动势; V batt是可充电电池的电压; R total是总电路的电阻,其中包含了电机内阻( R 0)和来自电池、连接线和其他元器件(如MOSFET)的电阻。在极短时间内的一个PWM周期中, V m和 V batt被认为是常值,电机电流为稳态,其变化均应接近于零。因此流经电磁控制器的电流可通过联立求解 式(2)、 式(3)得到:
(4)
依据 公式(1),流经电机的电流会相应产生一个控制力:
(5)
又因为占空比 D 1
(6)
式(6)揭示了可实现电流范围能通过增大电源电压( V batt)来实现。
公式(4)中所列明的关系也得到了实验验证。在实验中,电磁控制器模块被一个串联的电感( L 0 = 0.1 H)加电阻( R total = 16 Ω)加电池( V m = 2.5 V)进行了替换,来模拟一个恒定的输入电动势。可充电电池的电压( V batt)为12 V。H桥中用到四个N型MOSFET(型号:IRF840A),其DS端口间内阻( R MOS)为0.85 Ω,已经被计入总电阻( R total)中。此套实验设备与3.2节中所描述的单自由度实验基本相同,只是其中的电磁控制器模块被替换成了等效电池。有关此套装置的细节和图片可参见3.2节的内容。 图3展示了控制器电流与占空比( D 1)之间的关系,其理论曲线来自 公式(4),数值模拟结果利用了MATLAB中的SIMULINK工具箱得到。 图3中数据的相互吻合也印证了 公式(4)与SIMULINK模型的准确性。
《图3》
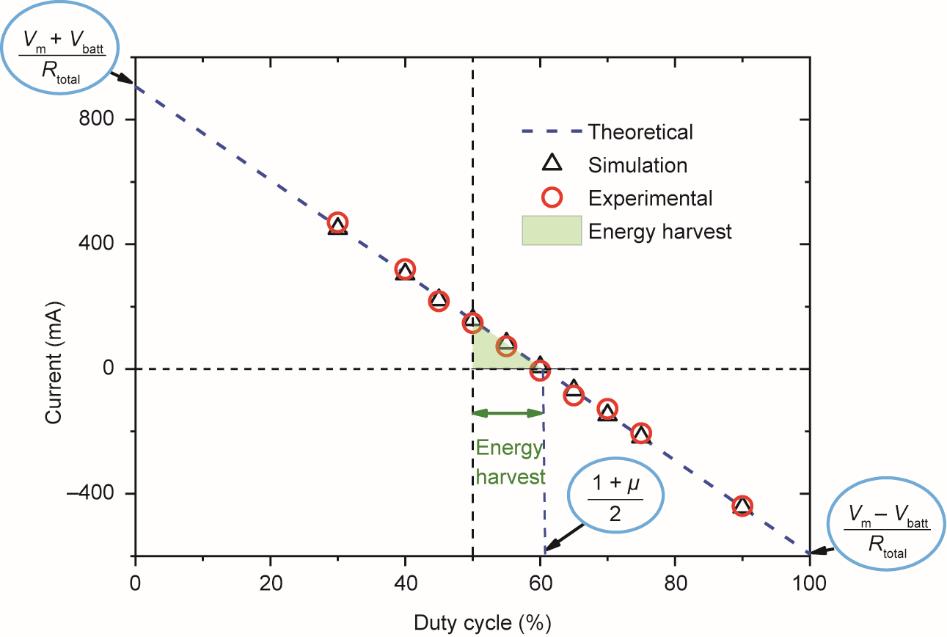
图3 流经控制器的电流与控制信号的占空比( D 1)之间的关系。
图4展示了电磁控制器的控制力(- F ctrl)与相对速度(
《图4》
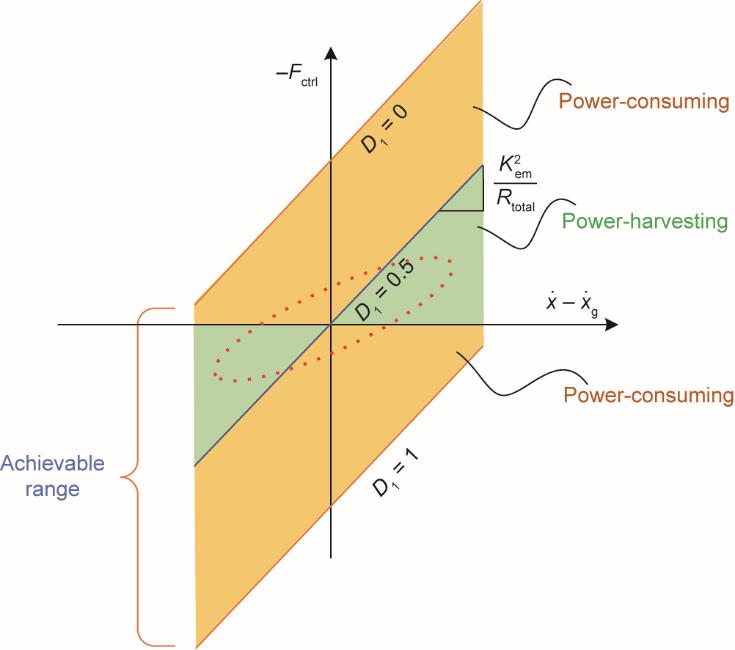
图4 主动控制力与相控制器对速度平面内能量消耗和能量采集的分界图。
《2.3 功率分析》
2.3 功率分析
本节将着重讨论通电磁控制器与可充电电池之间的能量流动。在一个极短的PWM周期内,通过控制器的电流 i [ 公式(4)所定义]可被认为是一个常值;而电池电流的幅值保持不变,方向则由H桥电路的连接(开关)方式决定。当电磁控制器的电流方向为正(自右向左),电池在 t 1和 t 2时间内将分别进行充电和放电过程。进而整体能量采集或消耗的功率则由 t 1和 t 2的相对时长所决定。故在一个PWM周期内的平均功率(即瞬时功率)可写成:
(7)
将 公式(4)带入 公式(7)得到:
(8)
瞬时输出功率( P)如果为正,则系统进行能量采集;如果为负,则反向由电池向结构注入能量。 公式(7)阐明了电磁控制器与可充电电池间的功率交换取决于H桥的占空比。我们进而可得到对应正瞬时功率的占空比范围是:
(9)
式中, μ = V m/ V batt。并可由 公式(8)得到相应的电流条件为:
(10)
图3中绿色范围对应了 μ > 0(也就是 V m > 0)的情况下,可进行能量采集的范围。
将 式(1)和 式(4)带入 式(10)中,可得到如下的在力-速度关系中进行能量采集的条件为:
(11)
图4所示的力-速度图像中的绿色区域代表了能量采集范围,而黄色区域则代表了能量消耗范围。其边界线是一条斜率为
鉴于力-位移曲线并不能一直保持在绿色区域内,若想实现一个自供能主动控制系统,需令一定周期内的平均输出功率保持为正:
(12)
图4中的虚线展示了在一个完整振动周期内的典型控制力-速度关系。只要力-速度曲线覆盖的绿色面积大于黄色面积,系统整体就处于能量采集模式。这个过程中,可充电电池将在绿色范围内采集能量并将其暂时储存,并在黄色范围内重新利用这些能量来进行主动控制。
注意上述推导默认的是结构的振动频率远小于H桥的开关频率;前者一般是从几赫兹到几十赫兹,而后者一般都超过了几千赫兹。如若不然,上述控制力将不能通过所提出的装置实现。
《3、 利用自供能控制器实现的主动隔振》
3、 利用自供能控制器实现的主动隔振
在本节中,所提出的自供能主动控制器被应用于单自由度隔振系统中( 图2),我们对其振动控制表现与能耗同时进行了数值与实验验证。本节的主动控制策略选用了天钩控制算法。
《3.1 数值建模和控制策略》
3.1 数值建模和控制策略
图2所示的单自由度结构的运动方程可写成:
(13)
式中, m h、 c h和 k h分别为单自由度结构的质量、阻尼和刚度系数; x、
(14)
经典的天钩控制策略(被控物体与虚拟吊顶之间存在一个假想阻尼器)[ 34]所能提供的控制力为:
(15)
式中, c sky为假想阻尼器的阻尼系数。随着 c sky数值的增加,主动控制效果也会相应提高。所以本研究中选取了不同的 c sky数值来实现不同级别的控制效果。
进而可得隔振系统的传递方程计算为:
(16)
式中, X和 X g由 x和 x g经傅里叶变换得到; r = ω/ ω n是地面输入频率与系统自然频率(
联立 式(5)和 式(15)可得到对应控制力的占空比为:
(17)
这个占空比随后会被输入到H桥中来实现相应的控制力。尽管本文只探究了天钩控制策略,但是所提装置和方法也可以实现其他多种主动控制策略。
图5展示了自供能主动振动控制系统的框图。其中包含主结构的状态空间模型、天钩控制策略、计算占空比的前馈控制算法、H桥电路和电磁控制器。此外电磁控制器的寄生阻尼力也在图中得以展现。作用于主结构的总控制力形成了一个闭合环路。
《图5》

图5 自供能主动振动控制系统模拟天钩控制算法的框图。
当单自由度结构受到了地动荷载[
(18)
式中, H为 式(16)中所见的传递函数。因此,在一个完整周期内的平均输出功率(输出到电池或从电池中消耗)为:
(19)
式中, T = 2 π/ ω是简协地面激励的周期。
图6则展示了在MATLAB Simulink中建立的完整的自供能主动隔振系统。模拟中的机械和电子参数的赋值均与实验保持一致。由于系统PWM频率为2 kHz,因而Simulink模拟中的计算步长被定为10 -6 s,用以保证每个周期内可采集到足够数量的点。此数值模型可用于验证上述理论结果并辅助下述实验设计。
《图6》

图6 自供能主动控制系统的Simulink模型。
《3.2 实验设计》
3.2 实验设计
图7展示了主动控制隔振台(即上述单自由度系统)的全套实验搭建。其中的三个主要组成部分(即控制模块、H桥模块和单自由度系统)已用灰色方框标出。
《图7》

图7 自供能主动控制系统的Simulink模型实验搭建。HIP4082芯片上的三字母缩写可参考数据手册(
此主动隔振台包含一块由四根竖直弹簧悬挂的质量板( 图8中4号物体),并由此限定了所搭建的单自由度体系将于竖直方向进行运动。预设的地动荷载输入信号将首先经由放大器放大,并进而驱动一个355 mm × 355 mm的振动台来对上述系统施加竖向地面激励。所提出的电磁控制器( 图8中的电机B)被安装在质量板与振动台之间。
《图8》
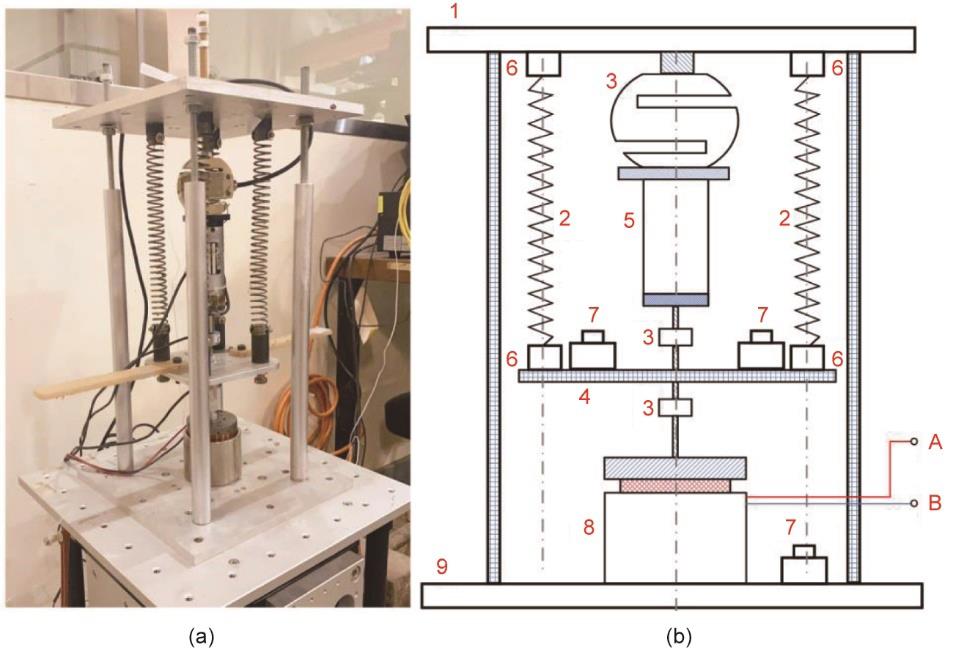
图8 隔振台实验搭建的照片(a)和示意图(b)。1:顶板;2:弹簧;3:测力计;4:质量板;5:电机A(测量);6:连接件;7:加速度计;8:电机B(控制);9:底板。
质量板的绝对加速度可通过固定其上的两个加速度计测得。相应的绝对速度则可通过对实时采集到的加速度信号进行积分(抗混叠转换器)得到。隔振板与振动台之间的相对速度信息通过另一个传感电机( 图8中的电机A)进行测量。因为框架的上板也被固定到振动台之上,所以两个电机相当于并联且所受相对振动也相同。此外,流经电磁控制器(电机B)的电流可通过测量一个与之串联的小电阻( R s = 1 ?)两端的电压得到。
本文所采用的单片机为Arduino Uno(意大利),其上的芯片为ATmega328(美国),时钟频率为16 MHz并拥有14个输入/输出(I/O)端口和四个模拟信号输入端口。其典型的功率消耗为250 mW。如对系统能耗敏感,可换用Arduino Pro Mini(意大利)或者自主搭建的单片机(去除非必要零件)来显著减小能耗。此外,上述质量板的绝对速度、电机电压与电路电流均通过单片机以200 Hz进行采集,进而对相关数据进行处理并执行相应的控制算法(如 图5、 图6中的单片机模块所示)。所涉算法是通过Arduino AG提供的基于C语言的开源集成编译环境(IDE)进行编译并上传至单片机。单片机输出的PWM信号频率为2 kHz,所对应PWM周期为500 μs。
电磁控制器的两个端口( 图2、 图7、 图8中展示的端口A、B)经由H桥电路与可充电电池相连。 图9展示了印制电路板(PCB)的布局和一个搭载了H桥电路的成品PCB(35 mm × 60 mm)的照片。H桥电路由四个N型MOSFET组成并由一个如 图7所示的全桥驱动进行控制。这里引入全桥驱动主要是为了正常触发两个在源端(source pin)有电压波动的高位MOSFET。上述单片机中输出的PWM信号将传递给此全桥驱动。 图7中 R 1的数值将决定上述两个互补的PWM信号之间的空载时间,用以避免短路情况的发生。依照使用手册,本文中所选用的 R 1 = 10 k?会提供一个0.5 μs的空载时间。可充电电池组则由三个镍氢电池串联而成,提供一个12 V的电压。此外本实验用到了一个额外的电感来增加内感数值,从而使电流曲线更加得平滑。
《图9》
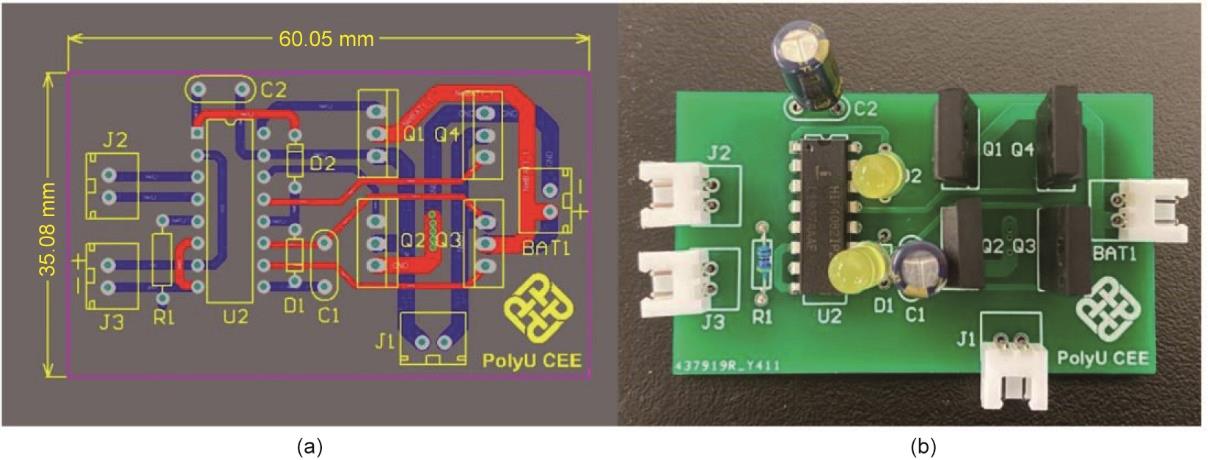
图9 H桥模块。(a)PCB布局;(b)PCB原型板照片。PolyU CEE:香港理工大学土木及环境工程学系。
除了对控制算法所要求的反馈信号进行采集外,为了更好地评估振动控制效果及其能耗表现,我们引入了更多的传感器。振动台的加速度由一个额外的加速度计所采集测量。质量板和振动台的速度则通过两个激光位移计进行采集。电磁控制器所提供的控制力通过一个力传感器进行采集。上述测量值均不用于控制算法,所以通过另一套采样频率为10 kHz的采集系统进行采集。此外流经电池的充放电电流则通过一套采样频率为100 kHz的采集系统进行采样。其采样频率为PWM信号频率的50倍,从而用于确认PWM信号的占空比。
表2总结了实验中所涉及的主要参数,而主要仪器和设备的型号则被列于 表3。此套隔振装置受到的地动加速度恒为0.18 g,激励频率范围为3~15 Hz。其所模拟的两个天钩系统的阻尼系数( c sky)分别为20 N?s?m -1和40 N?s?m -1,进而对其控制效果和能量进行了分析。
《表2》
表2 主动隔振台的主要参数
| Item | Parameter | Symbol | Value |
|---|---|---|---|
| SDOF structure | Mass a | 1.5 kg | |
| Stiffness | 3 100 N·m -1 | ||
| Damping coefficient | 2.86 N·s·m -1 | ||
| Angular natural frequency | 45.46 rad·s -1 (~7.23 Hz) c | ||
| EM motor A (sensing) | Motor constant | 7.474 V·s·m -1 (or N/A) | |
| EM motor B (control) | Motor length | 64 mm | |
| Shell length | 55 mm | ||
| Motor constant | 41 V·s·m -1 (or N/A) | ||
| Motor inner resistance | 5.5 Ω | ||
| Motor inductance | 0.012 H | ||
| Parasitic damping coefficient b | 30 N·s·m -1 | ||
| Circuit | Added inductance | 0.1 H | |
| Sensing resistance | 1 Ω | ||
| Total resistance | 16 Ω | ||
| Arduino Uno | ATmega328 | 16 MHz | |
| Nominal power consumption | 250 mW |
《表3》
表3 实验所用仪器与零件的型号
| Item | Part number |
|---|---|
| Accelerometer | B&K 4370 (Denmark) |
| Data acquisition system (high frequency) | TiePie HS5 (Netherlands) |
| Data acquisition system (low frequency) | KYOWA, EDX-100A (Japan) |
| EM motor A (sensing) | Baldor LMNM2-1F5-1F1 (USA) |
| EM motor B (control) | VCM Tech Co. (China) |
| Full bridge driver | HIP 4082 (Japan) |
| Inductor | Hammond 195T5 (Canada) |
| Laser displacement transducers | KEYENCE, LK-50 (Japan) |
| MCU | Arduino Uno (Italy) |
| Ni?MH batteries | Varta (Ireland) |
| N-MOS | IRF840A (USA) |
| Shake table | APS 420 (USA) |
| Signal converter (anti-aliasing) | KD5008C (China) |
《3.3 时滞的影响》
3.3 时滞的影响
图10展示了实验和预设电磁控制力之间的对比图像。前者利用 公式(1)通过所测电机电流计算得到,而后者标示了采集到的绝对速度与阻尼系数( c sky = 40 N?s?m -1)的乘积。尽管实验得到的控制力与预设控制力的幅值非常接近,但两者间可观测到一个 τ = 0.01 s的时滞。这个时滞或由数据处理过程导致(涉及数模转换、传递、同步和控制算法的执行)。针对时滞的典型解决方案是增加一个补偿器[如比例-积分-微分(PID)控制器];但由于时滞并非本文的研究重点且考虑到其在本文中的影响有限,因此在本文相应的控制方案中并未引入补偿器。
《图10》
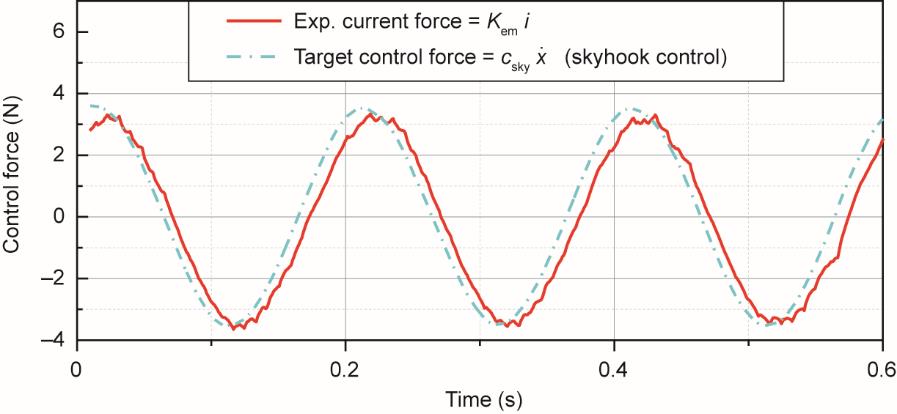
图10 时域中控制力的测量值与目标值之间的比较( c sky = 40 N·s?m -1,激振频率 f = 5 Hz,采集频率 f sample = 10 kHz)。Exp:实验。
但是如果考虑主动控制中的时滞现象,则 公式(16)中的传递方程可改写为:
(20)
通过 公式(20)可看到时滞带来的影响与频率有关,且该影响在高频下会被放大。因而我们在SIMULINK模型中也通过在控制力与结构之间增加一个时滞模块( 图6中左下角所示)来引入并分析时滞效果所造成的影响。同时,考虑了时滞影响的理论传递函数和数值模拟对主动隔振系统的动力学特性有着更准确的描述,其结果也可以更好地与实验数据进行比对。
《3.4 功率分析》
3.4 功率分析
图11展示了天钩系数为 c sky = 40 N?s?m -1,振动频率为5 Hz时,流经电磁控制器的电流、可充电电池的电流和相对应的功率在时域内的曲线。
《图11》

图11 时域内电机与可充电电池之间的能量交换( c sky = 40 N·s?m -1, f = 5 Hz)。(a)控制器电流和电池内功率流;(b)控制器电流和电池电流,所选时间窗展示了能量消耗和能量采集的位置;(c)放大后的时间窗展示了能量消耗(①)与能量采集(②)的细节。
图11(a)中的绿色虚线是电动势(EMF)除以 R total得到的曲线。所以依据 公式(11),其包络的绿色阴影部分面积代表了能量采集区域。当经过电磁控制器内的电流不断进出绿色阴影部分面积时,系统则持续在能量采集与能量消耗两种模式下进行交替变换。图中竖向红色虚线标明了控制器电流(橙色电流)与能量采集区域(绿色阴影)的交点。这些竖线也相应将全部时域范围划分成了如 图11(a)中所示的能量采集和能量消耗两种区间。鉴于流经电池的电流持续进行着高频变换(充放电), 图11(a)中所展示的功率曲线是每0.002 s(大致4 PWM周期)计算一次平均值而得到的平均功率曲线。可观察到此功率曲线上的零点位置与上述竖直的红色分割线相重合。整体来看,当电机电流在绿色区域内,电池的瞬时功率为正(能量采集);与此相反,当电机电流在绿色区域外,则电池的瞬时功率则为负(能量消耗)。
图11(b)特别展示了与 图11(a)所示时域范围内相对应的电池电流图像。流经电池的电流(灰线)依照PWM信号的频率(2 kHz)进行方向变换,且每一个PWM周期内正、负电流(分别代表了充、放电过程)的幅值基本维持不变;而流经电磁控制器的电流则以一个较慢的频率(5 Hz)进行变换。因为在一个PWM周期内控制器电流交替与两个相反流向的电池电流接通,所以控制器电流在单侧上应包络电池电流曲线。
我们又在能量消耗和能量采集范围内各自选取了两个具有代表性的时间窗[ 图11(b)、(c)中分别标记为
图12分别展示了两个有代表性的实验组图[(a) c sky = 40 N?s?m -1、 f = 3 Hz,(b) c sky = 40 N?s?m -1、 f = 7 Hz]所对应的控制力与速度图像。其分别对应了能量消耗与能量采集两种情况。通过力传感器采集到的总力包含了电磁力和寄生阻尼力。前者可控而后者不可控。实验得到的电磁力是根据 公式(1)通过测量得到的电流计算而来。整体来看,模拟得到的电磁力与实验结果基本吻合,也侧面验证了考虑了时滞的数值模型的准确性。
《图12》
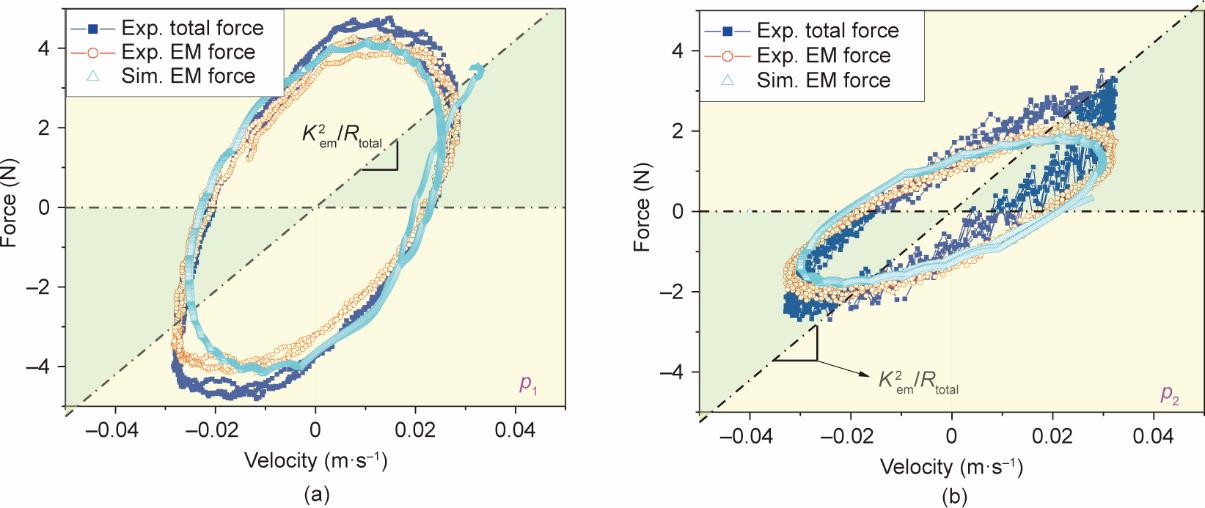
图12 能量采集和能量消耗的实验结果。(a)能量采集( c sky = 40 N·s?m -1, f = 3 Hz);(b)能量消耗( c sky = 40 N?s?m -1、 f = 7 Hz)。Sim:模拟; p 1和 p 2与图13和图14中的标记点相对应。
图4中所展示的瞬时采集功率范围与消耗功率范围也在 图12中标出。 图12(a)、(b)中椭圆形的力-速度曲线均会经过上述两个范围。 图12(a)中的椭圆形曲线更多地落在绿色区域外。依照 公式(11),实验与模拟下的平均输出功率分别为-80 mW和-59 mW。与之相反, 图12(b)中的曲线则有更大的面积落在绿色区域内,其实验与模拟结果经计算分别可得平均输出功率为8 mW和3.6 mW。此正输出功率表明此时主动控制器进行了能量收集。
图13展示了所有情况下的理论、模拟和实验得到的平均功率。三种数据的相互吻合再次印证了理论与数值模型的有效性。整体来看,随着天钩的阻尼系数的增加,其隔振效果得到了增强,但平均输出功率却有所下降。 图13中的 p 1和 p 2两点分别对应3 Hz和7 Hz激励的工况,并与 图12(a)、(b)相对应。
《图13》

图13 天钩控制算法下主动隔振系统的输出功率。Theo:理论。
在有较强振动控制需求的共振区间6~10 Hz内(对应的频率比 r ∈ [0.8, 1.4]),可实现能量采集模式下的主动隔振效果(符合天钩控制策略)。然而在低频范围内( r < 0.7),此主动隔振系统将消耗能量。而当频率比 r > 2.07时,尽管理论数据表明系统整体将进行能量采集,但模拟和实验结果均说明因为H桥电路中其他位置的能量损耗,其输出功率将会略小于零。
虽然系统的自供能特性未能在全工况下得以实现,但我们却可以通过减小系统总电阻( R total)来扩大 图13中的能量采集范围进而对其加以改善。此外,我们更关注的是使其在共振区间内可以产生优异的隔振效果;而系统在共振区间外也将对 c sky的数值变得不敏感,进而我们可以通过在共振区间外选取一个更小的 c sky值来权衡能耗与隔振控制效果。
需要指出的是上述有关能耗平衡的讨论只考虑了电磁控制器,而没有关注传感器与单片机的能耗。然而,本文仅进行了一个针对小型结构的概念验证实验,而传感器与单片机的能耗在之后针对大型结构的振动控制应用中则可以忽略不计。
《3.5 控制效果》
3.5 控制效果
图14展示了主动隔振系统在不同工况下所得到的理论与实验的传递函数曲线。其中绿色实线代表了仅有寄生阻尼工况下的基准无控情形。黑色点线记录了被动控制组的传递曲线(结构与地面间接入了被动黏滞阻尼 c = 20 N?s?m -1和 40 N?s?m -1)。红色虚线对应了 公式(16)中所定义的理想天钩系统下的理论曲线,而蓝色点划线则展示了 公式(20)中所定义的考虑了时滞作用的天钩系统的理论曲线。此两组的相互比对展示了时滞作用所带来的负面影响(特别是在高频区域内)。此外,前文详细讨论过的两点( p 1和 p 2)已用粉色圆圈圈出。
《图14》

图14 天钩控制算法下的传递函数曲线。
两组阻尼系数下( c sky = 20 N?s?m -1和40 N?s?m -1),相符良好的实验与理论数据也侧面印证了主动天钩控制效果的成功实现。整体来看,主动天钩控制可得到远好于相应被动控制下的隔振效果。由 c sky = 40 N?s?m -1的工况可观察到对应曲线上的共振峰已变得很不明显。
《4、 结论》
4、 结论
本文创新性地提出了一套自供能主动式振动控制方案,用以突破传统主动控制方法中的供能瓶颈。文中详细阐述了其系统设计、工作原理、能量流动、控制算法、控制效果等方面,并开展了理论、数值和实验三方面的论证。所提出系统的有效性与可行性,也通过其在主动隔振系统中的应用得到了有效印证。本文所得结果阐明通过操控PWM控制信号的占空比,不仅可以精确产生所需的主动控制力,而且允许电磁控制器在不同能量模式间(能量采集或能量消耗)进行变换。因而我们首次实现了一个真正意义上的自供能主动控制系统,并在不需要外部能量输入的情形下实现了经典天钩隔振控制算法。
尽管本文只展示了天钩控制算法及其自供能的可行性,但是所提出的方案与装置本质上提供了一个具有普遍意义上的解决方案。其他多种主动控制策略亦可通过更新单片机中的算法并添加所需的相应传感器而轻松实现。因此,所提出的自供能主动控制方案预期可对现存不同应用中的多种主动控制技术产生深远影响。











 京公网安备 11010502051620号
京公网安备 11010502051620号




