《1. 引言》
1. 引言
随着近几十年来计算科学和技术的快速发展,数值建模和仿真已经广泛应用于科学研究和工程应用中,成为重塑、探索、解析和预测复杂系统动力学行为必不可少的方法[1‒2]。然而,随着科学技术和现代社会的快速发展,人们所关心的物理系统动态行为越来越复杂,以至于不能再简单地将其视为纯连续系统[3‒4]。这种复杂系统的出现极大地挑战了目前的建模和仿真方法。
图1展示了一些例子。在生态系统中[图1(a)],系统的运行和演化模式会因为各类离散事件的发生而产生本质性的变化[5‒6]。另一个例子是如图1(b)所示的新冠病毒肺炎(COVID-19)的传播和控制,政府会根据病毒感染模式的变化进行防控措施的调整,如城市封闭、禁止旅行等,而这些防控措施的调整又会反过来影响和决定一种病毒传播的新感染模式[7‒8]。在工程应用中,化学工程中的温度等连续状态与相变等离散事件相互作用[9];机器人控制中脚部撞击和膝盖锁定会导致模式转换[10],类似的例子还有很多。显然,上述系统都不能简单地建模为纯连续系统。它们表现出一种混杂特性,即连续状态和离散事件的共存。
《图1》

图1 广义混杂系统及其多时间尺度特性的示例。(a)生态系统中的离散事件。这些事件的时间尺度非常小。(b)新冠病毒防控中的离散事件。在离散事件的小时间尺度过程中(如从封城措施发布直至执行的阶段)可能出现短时的人流峰值。(c)在电力电子变换系统中,在给定的控制下,半导体器件的开关事件决定了能量流的传递情况。在开关的过程中,纳秒级开关瞬变会导致电磁能量的“突然”变化,有时还会导致系统故障;这一问题在兆瓦级电力电子系统中尤为突出。
另一类工程系统,也是本文研究的主要系统,是电力电子系统,如图1(c)所示。电力电子系统已经被广泛应用于电能变换的各个领域。尤其是考虑到气候变化和能源危机,兆瓦级电力电子系统已经被广泛应用于新能源发电和并网领域,作为新能源和电网、用户之间必不可少的接口设备。在电力电子系统中,原本连续的电压和电流通过引入功率半导体开关器件被“离散化”[13]。因此,该系统表现出连续状态和离散事件的共存,可以被定义为混杂系统。
“混杂系统”的概念一经提出[14]就很快成为一个热门研究领域[4,15‒16]。最早的混杂系统是由离散信号控制的连续状态系统[17]。但是发展到现在,混杂系统已经包括了连续状态和离散事件之间的混杂及其相互作用[15]。然而,上述定义和讨论仍然无法完备描述目前工程系统中复杂的混杂特性。在实际系统中,离散事件不可能瞬时发生。由于时间是事物存在的量度,在离散“事件”中间必然有一个时间间隔,尽管它通常太快(时间尺度太小)而难以被察觉。从物理的角度看,离散事件仍然具有时间尺度较小的连续瞬变过程;这导致混杂系统具有突出的多时间尺度特征(图1)。离散事件的瞬变过程在很多情况下具有重要意义,特别是当事件的小时间尺度过程所对应的物理能量量值很大时[18]。一个典型的例子是兆瓦级电力电子系统中的开关瞬态过程[图1(c)]。由于功率等级高,大电磁能量的“突变”和“不平衡”极有可能导致系统故障[19‒21]。
传统的混杂系统概念基于理想的离散事件假设,不能描述事件的瞬态过程。因此,在本文中,我们引入并定义了广义混杂系统(generalized hybrid system, GHS)的概念,以更具一般性、更完备地描述真实物理系统的混杂特性。我们将GHS定义如下:GHS是由时间驱动的连续动力学过程和事件驱动的离散动力学过程组成的多时间尺度动力学系统,其中大时间尺度连续过程包含离散事件,离散事件又包含小时间尺度连续瞬变过程。
在GHS中,连续状态和离散事件作为两种不同类型的变量同时存在、相互作用,共同决定系统的动力学行为。与此同时,系统内存在两种不同时间尺度的连续状态,导致在能量和功率较大的物理场景中必须考虑突出的多时间尺度特性。这样的GHS不仅在物理世界中很常见,而且可以被视为动态系统的一种更一般的形式。对如此复杂的动态行为,一大挑战即是如何对GHS进行有效和高效的建模仿真。
本文的其余部分按如下思路撰写。第2节总结了使用传统方法建模和仿真解算GHS的挑战。第3节基于GHS的多时间尺度特性,提出数值凸透镜建模方法,以实现状态量的离散,来应对GHS中多时间尺度行为带来的挑战。所提出的方法对于不同工程应用中的GHS具有一般性的应用价值。更具体地说,我们聚焦于如何对兆瓦级电力电子系统进行建模和求解。第4节展示了所提出的方法在兆瓦级电力电子系统中的应用。最后,第5节给出本文的结论。
《2. 广义混杂系统建模仿真的挑战》
2. 广义混杂系统建模仿真的挑战
《2.1. 一般性的广义混杂系统面临的建模仿真挑战》
2.1. 一般性的广义混杂系统面临的建模仿真挑战
在传统的建模和仿真方法中[22],时间被当作独立的变量来构建系统模型并确定相应的求解方法,这称为时间离散方法。这种方法是一个自然的想法:既然时间是事物存在的量度,那么研究一个动态系统就是探索基于时间的系统动力学行为变化。然而,时间是连续均匀流动的,没有质变;而与此相反,GHS中的状态变量不仅可以累积,而且可以发生质的变化。换句话说,当某个条件满足时,系统将切换到另一种模式,并以完全不同的模式继续新的变化。在这种情况下,基于时间离散的数值实验会面临重要的问题:时间的离散点可能不是事件发生的确切时刻,导致此类方法无法准确建模解算离散事件对系统动力学行为的影响。因此,在此类方法中,必须采用极小的时间步长才能准确定位离散事件并解算事件发生过程中的小时间尺度瞬态行为,从而导致效率极低,甚至计算发散。
《2.2. 兆瓦级电力电子系统面临的建模仿真挑战》
2.2. 兆瓦级电力电子系统面临的建模仿真挑战
2.1节对建模和解算GHS时遇到的挑战进行了一般性的讨论。我们现在详细讨论兆瓦级电力电子系统,以展示更具体的案例。电力电子系统的建模整体可以分为三类:平均模型[23‒24]、理想模型[25‒27]和机理模型[28‒30]。平均模型消除(平均化)了一个或几个开关周期内的开关动作,因此将GHS转换为纯连续系统。这使得考虑闭环控制的分析和设计,基于传递函数和波特图[31]等已有的数学工具有效开展。在GHS的概念中,平均模型只关注了大时间尺度的连续动态过程。离散事件的影响被忽略,其切换瞬态也一并被忽略。如果要考虑离散开关事件,可以采用理想开关模型,该模型已经在许多系统级仿真工具中得到广泛应用[26]。这一模型考虑了“大时间尺度连续-离散”过程,但仍然忽略了离散事件的瞬态过程。
现有的开关瞬态模型是基于半导体物理的复杂等效电路,如图2 [28]所示。这种物理模型放弃了离散事件的假设,转而将半导体开关描述为小时间尺度的连续系统。然后GHS再次被转换为纯连续系统,但这次是转换为考虑开关瞬态的小时间尺度系统。从理论上讲,物理模型准确地描述了小时间尺度的瞬变过程。实际应用中,这些物理模型也已在电力电子商业仿真工具中实现[29,32],并已用于包含少量开关器件的电路和系统仿真研究中。然而,在包含大量开关器件的兆瓦级电力电子系统应用中难以使用此类模型[33‒34]。这里举一个例子:包含24个开关器件的50 kV⋅A固态变压器,采用开关瞬态模型仿真[35]。虽然这仅是一个中等规模的电路,但仿真花费了大约9 h才能完成,并且在数值解算过程中经常遇到仿真发散。可以预见,几乎不可能在可接受的时间内基于开关机理模型来解算规模更大的兆瓦级电力电子系统,同时确保收敛的仿真结果。
《图2》
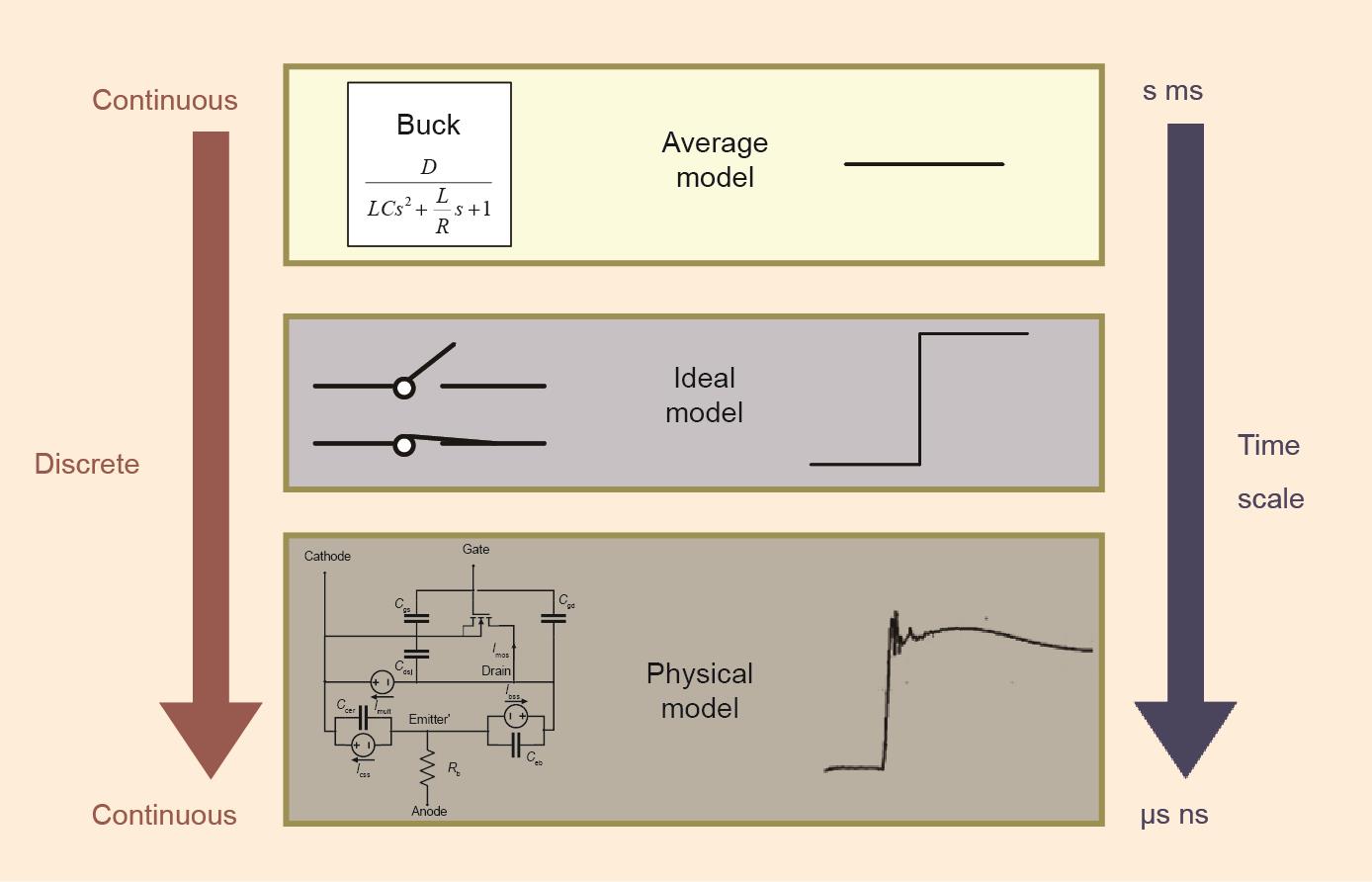
图2 兆瓦级电力电子系统的现有建模方法主要包括平均模型、理想开关和瞬态模型。每种模型关注了GHS“连续-离散-连续”一体化过程的一个方面,也就是关注了不同的时间尺度。对于平均模型,图中,D是占空比,L、C和R分别是buck电路中的电感、电容和电阻。对于瞬态模型,图中,Cgs、Cgd和Cdsj是金属氧化物半导体电容,Imult、Icss和Ibss是IGBT模型中的等效电流源,Ccer和Ceb是IGBT模型中的等效电容,Rb是连接到阳极的等效电阻,Imos是金属氧化物半导体沟道电流。
综上所述,在兆瓦级电力电子系统中对“连续-离散-连续”的一体化过程进行建模仍然具有很大的挑战性。现有方法以时间为变量来建模,因此,只能关注某个方面(即连续/离散)和某一时间尺度。
由于存在大量的离散事件,针对兆瓦级电力电子系统这一广义混杂系统进行仿真求解同样具有很大的挑战性。现有的方法,如状态空间方法[26‒27]和节点分析方法[36],以及与之相对应的各种固定或可变步长的积分方法[37],都属于时间离散方法的范畴,如图3所示。对于具有数百或数千个半导体开关的电力电子系统,不同开关事件的发生通常是异步的;即使对于相对较低的开关频率,如1 kHz,解算系统中的1000个开关也可能导致事件每秒发生100万次。这导致仿真速度很慢,收敛性很差。
《图3》
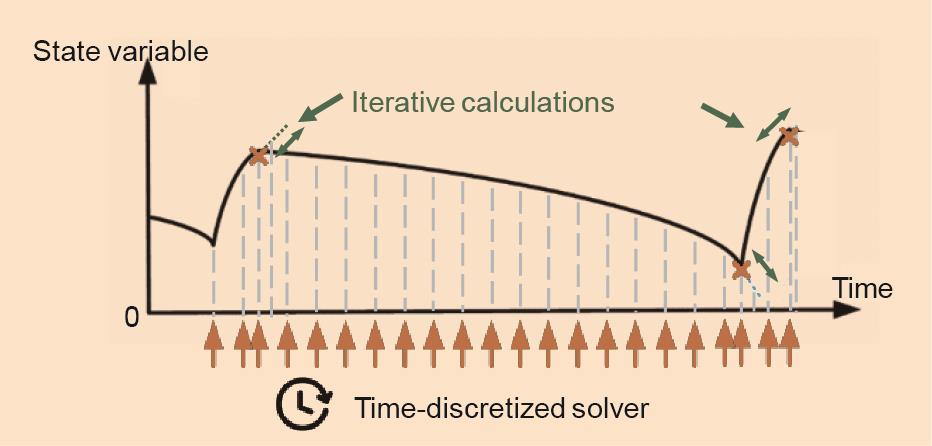
图3 时间离散求解方法示意图。
《3. 实现状态离散建模解算的数值凸透镜方法》
3. 实现状态离散建模解算的数值凸透镜方法
为了解决上述广义混杂系统建模解算的挑战,我们提出状态离散的思想。其基本思路是改变状态变量和时间变量的主从地位。为了实现状态离散建模解算,我们通过与光学类比,提出一种数值凸透镜(NCL)方法。尽管光学和计算科学是两个独立的领域,但它们具有相同的目标:观察。在光学实验中,如果不能清楚地看到物体的某一部分,可以使用凸透镜对其进行放大。这启发我们将数值实验中的系统变量与光线进行类比,使之具有“频率”和“强度”,从而当它们通过NCL时具有不同的折射率。这样,我们就可以挑选出发生质变的变量(这意味着它们的放大成像足够清晰,可以观察到),让清晰的成像触发数值实验。这形成了一种“选择性”的数值实验,其中我们交换了状态和时间的主从地位。具体来说,基于NCL,状态的离散(即成像过程)触发系统的求解,时间的离散相应确定。这样,我们可以有效地将离散的求解点与系统状态的质变相匹配,而无需进行不必要的计算,从而实现准确快速的数值实验。
《3.1. 基于NCL的广义混杂系统分形模型》
3.1. 基于NCL的广义混杂系统分形模型
要进行数值实验,首要任务是进行数值建模。借助NCL,我们可以建立GHS的“分形模型”(图4)。在分形模型中,系统动力学行为根据它们在时间尺度上的差异被解耦为不同的组合,这些组合被定义为不同的动力学平面。快平面中的动力学过程是慢平面中离散事件的瞬态过程。在每个平面中,系统动力学行为可以用混合自动机模型[25,38]建模。使用NCL观察分形模型时,系统变量将通过透镜成像。这个过程被称为“状态离散”。清晰的成像可以触发数值求解。特别是,当离散事件发生时,NCL会将其放大到一个新的动力学平面,并将数值实验切换到这个平面进行,其中系统的小时间尺度行为被描述为一个新的“小型混杂系统”。当这个离散事件结束时,数值实验将切换回之前的平面。通过这种方式,可以将不同时间尺度的动力学过程解耦,从而提高数值实验的求解速度和收敛性,并保证较高的精度。上述思想与几何学中的分形思想非常相似:对分形几何的研究表明,在不同的空间尺度上观察一个系统的几何特征时,通常会发现部分与整体有着惊人的相似性;同样,在数值实验中,借助NCL,我们可以在不同的动力学平面上观察不同时间尺度的系统动力学行为,并且可以将不同平面上的动力学行为相似地建模为混杂系统。因此,我们将这种多时间尺度广义混杂系统的数值模型称为“分形模型”。
《图4》
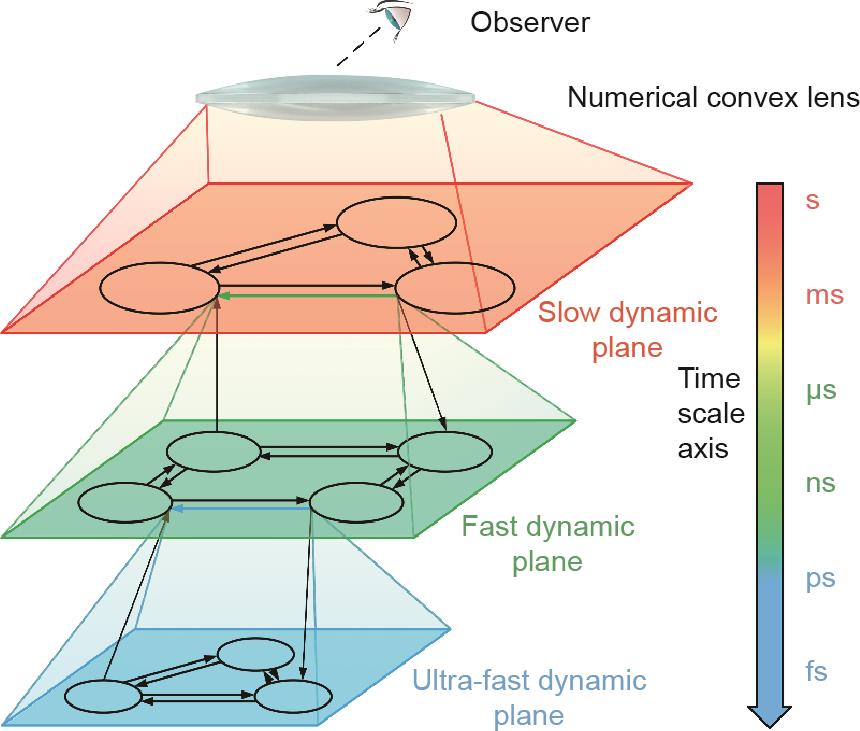
图4 基于数值凸透镜建立GHS的分形模型。GHS表现出突出的多时间尺度特征。基于数值凸透镜,我们可以将系统动力学行为解耦为不同的组合,并将它们定义为不同的动力学平面。每个平面中的离散事件可以通过数值凸透镜放大并建模为一个新的动力学平面。
在分形模型中,系统动力学行为根据它们在时间尺度上的差异被解耦为不同的组合,并定义为不同的动力学平面。例如,如图4所示,系统动力学分为三组,定义为三个不同的动力学平面:①包含秒到毫秒尺度动力学行为的慢过程动力学平面;②包含微秒到纳秒尺度动力学行为的快过程动力学平面;③包含皮秒到飞秒尺度动力学行为的极快过程动力学平面。通过这种方式,可以解耦区分不同时间尺度的过程。
在每个平面中,混杂系统可以建模为混杂自动机[38],如图5所示。混杂自动机模型是如下四类元素的集合。
《图5》
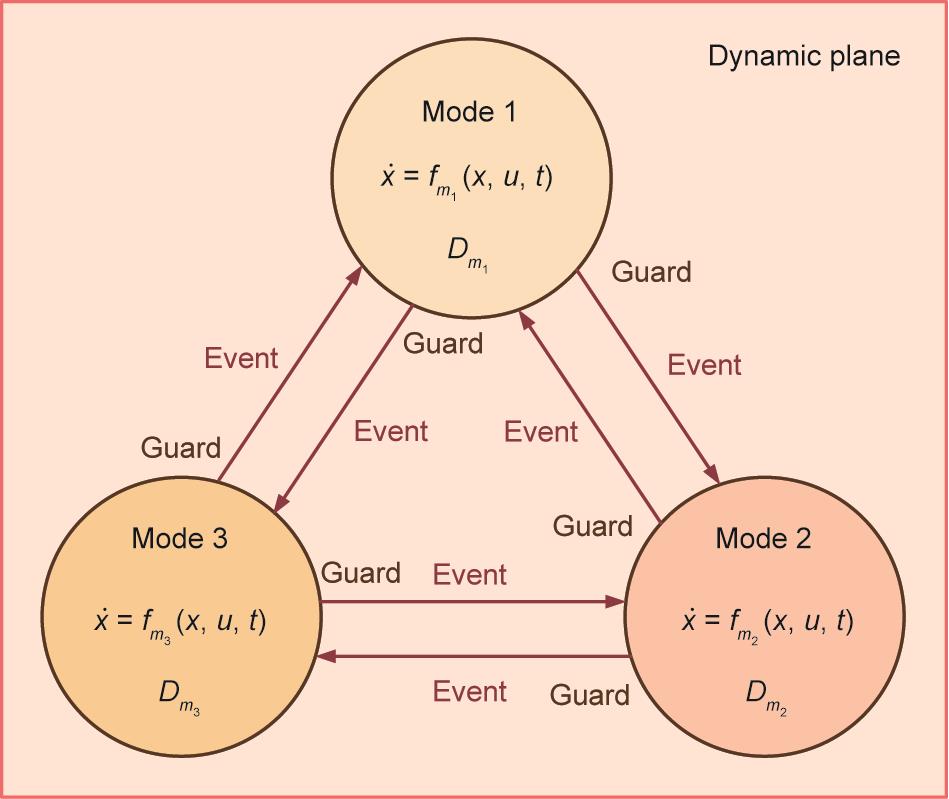
图5 单个动力学平面的混杂自动机模型。该模型包括四类元素:变量、模式、守卫和事件。动力学平面包含一组所有可能的模式及其守卫条件和切换事件。
《(1). 变量》
(1). 变量
①时间变量t。
②状态变量:系统内部能够完整描述系统动态行为且没有冗余的一组变量。
• 连续状态变量x:随时间连续变化的状态变量。
• 离散状态变量d:随时间不连续变化的状态变量。
③输入变量u:系统外部能影响系统内动态行为的变量。输入变量可以是连续的或离散的。
《(2). 模式》
(2). 模式
系统的动力学运行模式。离散变量的组合D决定了一种模式。在不同的模式下,系统动力学行为的运行规律是不同的,也就是说对应的数学模型是不同的。例如,在图5中,对于第k个模式m,我们可以将系统动力学行为描述为以下常微分方程(ordinary differential equation, ODE):
(1)
《(3). 守卫》
(3). 守卫
确定是否会发生从一种模式到另一种模式转换的条件。通常,守卫条件是几个不等式的组合逻辑:
(2)
式中,c为特征变量,可以用状态变量来表示;vth为对应的阈值。当不等式(2)成立时,系统状态将保持在当前模式;当特征变量越过阈值时,会引起不等式布尔值的变化(不等式不再成立),从而触发混杂系统的模式转换。
《(4). 事件》
(4). 事件
混杂系统的模式转换。当前模式的守卫条件更改其布尔值时,会触发一个事件。
《3.2. 基于数值凸透镜的广义混杂系统状态离散解算》
3.2. 基于数值凸透镜的广义混杂系统状态离散解算
本节介绍如何求解GHS的分形模型。根据NCL原理(图6),系统变量会解耦成不同的光线,经过清晰成像的变量将被挑选出来,并会自发地驱动数值实验。从一般意义来说,为了解决由连续状态和离散事件组成的GHS,对这两类具有不同性质的元素需要采用不同的成像原理。下面详细说明如何使用NCL求解GHS。
《图6》

图6 通过数值凸透镜观察GHS的分形模型。在求解分形模型时,连续状态的颜色(频率)和离散事件的光强反映了数值实验对该变量的关心程度,其中前者的数值含义是连续状态的数值误差,后者的数值含义是离散事件特征变量的权重。这两种变量通过数值凸透镜时呈现出不同的折射率,从而可以挑出清晰成像的变量,即发生质变的变量,从而自发地驱动数值实验。图中,yblue和yred分别是蓝光和红光的像高,fblue和fred分别是蓝光和红光的焦距。
设u0为物体与透镜的距离,y0为物体的高度,y为图6中的成像高度。我们假设,为了人眼能够清晰辨识,图像的高度应该大于分辨率阈值ylim,也就是说,
(3)
根据成像原理,可以得到某种颜色的像高y如下所述:
(4)
式中,f是系统变量通过透镜时的焦距。焦距f、折射率n和等效曲率半径R之间的关系可描述为:
(5)
因此,通过联立方程(3)~(5),我们可以推导出清晰观察像的条件:
(6)
这里,为简单起见,我们定义一个新的参数β来表示透镜系统中的常数:
(7)
那么清晰观察像的条件等价为:
(8)
剩下的问题变成了:系统变量折射率n的定义是什么?如上所述,GHS包含两种类型的系统变量:连续状态和离散事件。由于这两种变量具有不同的性质,它们在NCL方法中的成像原理是不同的。在NCL方法中,我们将它们与光线进行类比,赋予连续状态不同的颜色(频率),赋予离散事件不同的强度(光强)。根据凸透镜的折射原理,不同颜色或强度的光,其折射率不同,焦距也不同,它们的像自然会在空间上分离,大小不一。
对于连续状态,以单变量为例,我们将其比作一束具有可变颜色的单色光,其在某一时刻的颜色对应的频率称为数值角频率。在这里,我们将数值角频率定义为数值实验中的数值误差。目前,已经有许多为纯连续系统设计的算法可以提供每个时间步的局部数值误差估计,如广泛使用的ode45算法[37]和其他各类算法[39‒40]。与光学中的柯西色散公式相类似,连续状态的折射率Δn1与数值角频率ω具有如下非线性关系:
(9)
式中,b是透镜的“色散系数”。关系函数Δn1 (ω)表示了NCL对于连续状态的求解特性。
对于离散事件,再次以单变量情况为例,我们将其比作一束强度可变的光束,其强度I在某一时刻反映了离散事件的权重。在这里,基于方程(2),我们将强度定义为:
(10)
式中,cbase是特征变量c的基准值。公式(10)表明,离散事件的特征变量越接近阈值,离散事件的权重越大,在数值实验中的优先级越高。真实的透镜材料可能具有非线性,对不同强度的光表现出不同的折射率,这就是光学中的克尔效应。受此现象的启发,我们赋予NCL类似的效果,并定义折射率Δn与光强I之间的关系如下:
(11)
式中,K是透镜的克尔系数。K反映了透镜的另一个解算属性,即求解离散事件的误差控制能力。
考虑到连续状态和离散事件的成像原理,我们可以得到折射率的完整表达式如下:
(12)
对于连续状态,我们认为它们具可变频率和恒定强度,并且令
《3.3. 兆瓦级电力电子系统的建模求解》
3.3. 兆瓦级电力电子系统的建模求解
为了将上述方法应用于兆瓦级电力电子系统的仿真,本小节在电力电子应用中给出NCL(包括分形模型和求解算法)相关概念的详细解释。为了建立电力电子系统的分形模型(图4),我们根据时间尺度将系统动力学行为分为两层平面。第一层平面描述了大时间尺度的系统级动态过程,其中功率开关的导通和关断被视为离散事件。当开关处于稳定状态(导通状态或关断状态,分别建模为小电阻或开路)时,系统可以用状态方程来描述:
(13)
式中,为状态向量,的每个元素是一个独立的状态变量,即电容电压和电感电流;为输入向量,的每个元素都是系统的一个输入,如电源。此外,公式(13)说明,状态方程fsw的形式取决于,即开关函数向量,其中,的每个元素是开关的开关状态(开或关)。
对于模式切换,即离散事件,模型需要为每个切换事件定义守卫,如公式(2)所示。在这里,我们列出了离散事件的守卫条件。
对于二极管开关,其开通的守卫条件是其电压vD大于零:
(14)
其关断的守卫条件是电流iD小于零:
(15)
对于主动开关(如MOSFET或IGBT),其守卫条件由系统控制确定。在电力电子中,脉冲宽度调制(pulse width modulation, PWM)常被用于产生开关信号[41],其中当参考波形vref(由系统状态决定)与载波波形vcar相交时,产生一次开关动作。因此,主动开关的守卫条件为:
(16)
至此,分形模型中的第一层动力学平面已经建立。为了描述第一层平面中离散事件的瞬态过程,即半导体器件的开关瞬态,需要建立第二层动力学平面的混杂模型。在这里,为了建模开关瞬态行为,我们使用参考文献[20]中提出的分段解析瞬态(PAT)建模方法。在PAT模型中,根据半导体器件内部的物理机制将开关瞬态分为不同的阶段(图7)。每个阶段对应于第二层动力学平面中的一种模式(图5中的一个圆圈)。
《图7》
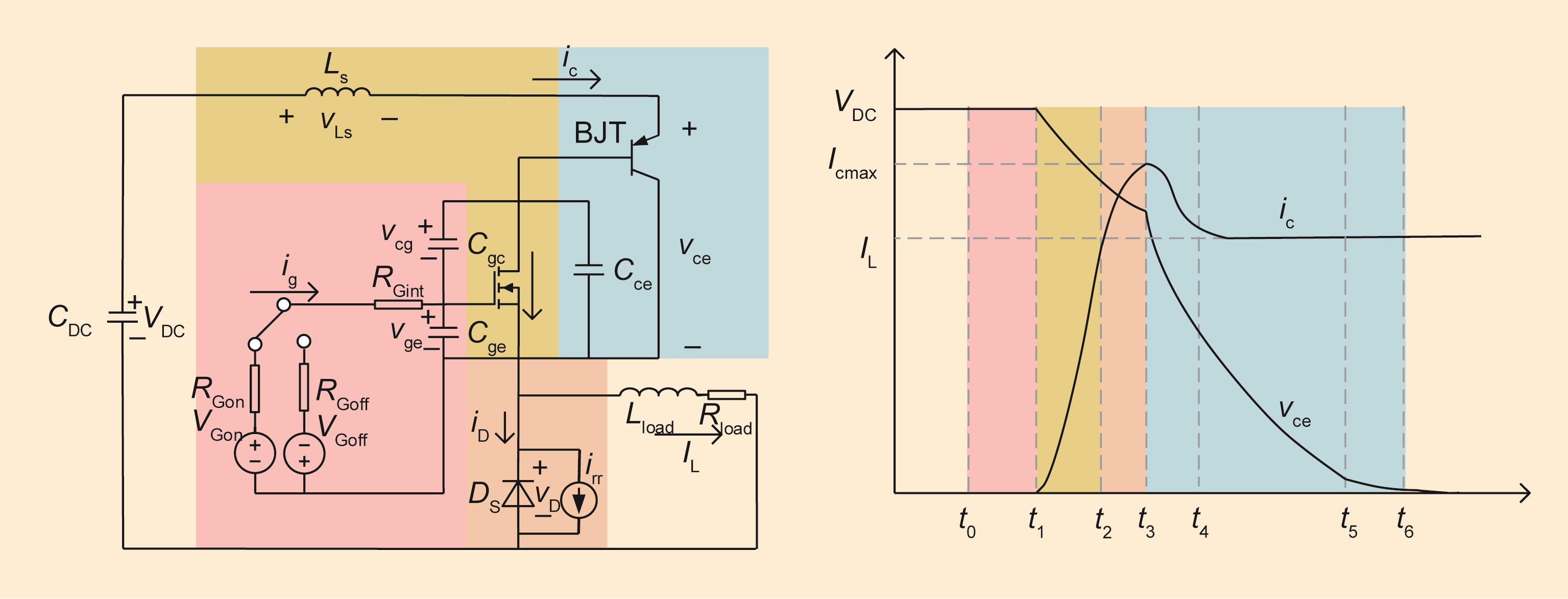
图7 IGBT-二极管开关对的PAT模型。半导体内部复杂的物理机制被解耦,如左边的电路图所示。在开关瞬态的每个阶段只考虑主要机制,如右侧波形所示。机理和阶段之间的关系用颜色标记。BJT是指双极结型晶体管。Ls是杂散电感,vLs是其两端的电压。CDC是直流母线电容,VDC是其两端的电压。VGon、VGoff、RGon和RGoff是栅极驱动电压和电阻。RGint是栅极节点的内阻。Cgc、Cge和Cce是IGBT的结电容,而vcg、vge和vce是它们两端的电压。DS是二极管,vD是它两端的电压,irr是它的反向恢复电流,iD是通过它的电流。Lload和Rload是负载的电感和电阻,IL是通过负载的电流。iC是通过IGBT的电流。ig是IGBT的栅极驱动电流。Icmax是开启瞬态期间IGBT的最大电流。t0 ~ t6是每个阶段的时刻。
现在我们已经建立了系统的分形模型,具有两层动态平面;下一个任务是用NCL求解分形模型。根据NCL原理,我们的任务包括:①确定连续状态变量的数值角频率;②确定离散事件变量的数值光强;③按照成像原理求解系统。下面描述这些概念在电力电子系统中是如何定义的。
首先,如上所述,数值角频率是数值误差的估计,取决于积分算法。对于非刚性的电力电子电路,我们可以使用柔性自适应离散状态(flexible adaptive-discrete state, FA-DS)积分算法来计算连续状态的数值解[39]。根据该算法,数值角频率定义如下:
(17)
式中,x是状态变量之一(电容电压或电感电流);xbase是x的基值;p是积分算法的阶数;x (+1)表示x的第(p+1)阶导数;Δt表示自上一个计算时间点以来数值积分持续的时间(积分步长)。
对于离散事件,每个离散事件的数值光强度的定义已在方程(10)中给出。我们将离散事件求解基值定义为分形模型中所有阈值变量[方程(14)~(16)]以及算法设置的绝对容差之间的最大值。
根据公式(8)~(12)和公式(17),我们就可以基于NCL成像来解算电力电子系统。其中,有三个参数可以控制仿真精度,即b、K和β,它们分别控制连续状态、离散事件和整体仿真的误差容限。一旦清晰的成像触发了新的计算,我们可以使用离散状态算法来计算连续状态,或者使用割线法[39]来定位离散事件的发生时间。此外,离散事件将被放大到下层动力学平面以解算开关瞬态。
《4. 应用和验证》
4. 应用和验证
本节介绍状态离散方法在大容量电力电子系统中的应用。以一个2 MW容量的可再生能源系统为例,对所提出的建模和仿真方法进行测试和验证。图8说明了系统的一种运行模式,其中包含了可再生能源和储能,而关键接口设备即为连接电网、可再生能源、储能和各种类型负载的四端口电能路由器(electric energy router, EER)[34]。
《图8》
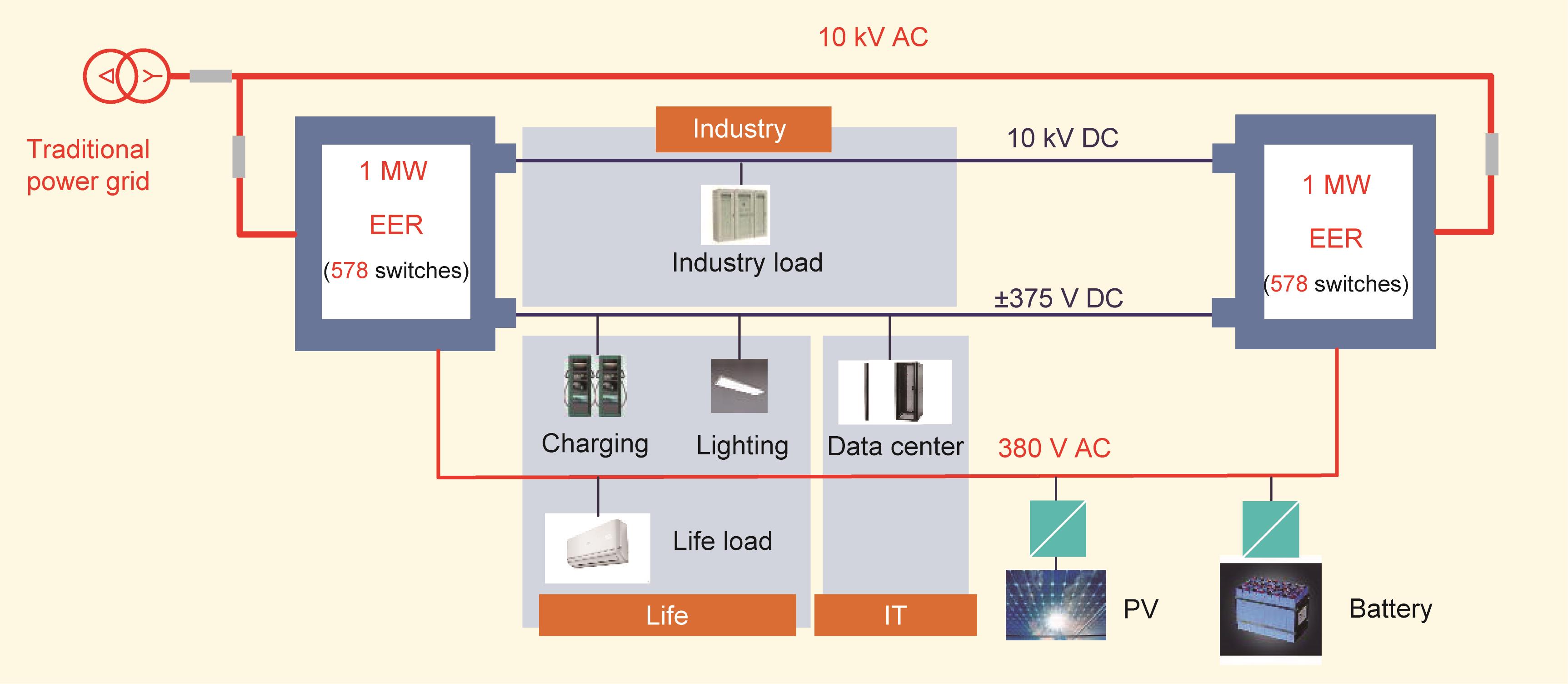
图8 所研究的电力电子系统结构示意图。
EER的拓扑结构如图9所示。在所研究的系统中,一个EER包含576个开关器件;理论上,这意味着系统总共有2576种可能的运行模式。此外,每个模式转换都伴随着纳秒级的电磁瞬变过程。这使得系统无法使用当前可用的任何时间离散方法和工具来解算,除非大大简化其数学模型;而这种简化会导致精度降低。另一方面,即使通过忽略离散事件的瞬态过程进行简化,仿真仍然需要很长时间(长达数小时或数天)。因此,由于数值建模和求解的挑战,传统上此类系统的设计和分析主要依靠经验或简化计算。
《图9》

图9 所研究的电能路由器(EER)的拓扑。它包含一个10 kV高压交流(HVAC)端口、一个10 kV高压直流(HVDC)端口、一个±375 V低压直流(LVDC)端口和一个380 V低压交流(LVAC)端口。20 kHz高频交流母线作为EER内部的交流总线。一台EER装置包含87个子模块(SM)和72个高频变压器(HFT)。
为了更好地阐述所研究案例中分形模型的概念,我们在这里给出分形模型的数学形式,以EER中的一个HVDC子模块为例。对于上层平面,我们可以推导出两种模式的状态方程如下:
(18)
(19)
式中,iLHD为通过子模块电感的电流;vCHD为子模块电容两端的电压;Ron为MOSFET的导通电阻;vin为子模块最左侧的输入电压。
对于两种模式之间的过渡,按照PAT模型,小时间尺度平面也被划分为不同的模式,如图7所示。如果我们将t0和t1之间的阶段定义为模式L1,将t1和t2之间的阶段定义为模式L2,可以得到以下模型:
(20)
式中,Ls为杂散电感;vSHD2、vSHD3、ivSHD1和iSHD4为MOSFET的等效电压和电流源,其表达式由PAT模型[20]给出。基于上面的分形模型,可以为EER系统搭建一个数值实验平台。基于此,测试了一个EER的0.2 s负载变化动态过程。与时间离散方法相比,数值凸透镜实现的状态离散方法可以显著提高计算效率[图10(a)]。选择商用的电力电子专业仿真软件作为比较基准,所有测试均在同一台个人电脑上进行,配备4.20 GHz Intel Core i7-7700K CPU和32 GB内存。在仿真200 ms动态过程时(忽略切换瞬态,因为现有工具无法解算大规模系统的开关瞬态过程),数值凸透镜在相同精度下实现了1000倍以上的提速,将仿真时间从近4 h缩短到10 s左右[图10(b)和(c)]。这个结果是在普通的个人计算机上实现的,没有使用基于多核并行计算的加速技术。此外,数值凸透镜可以利用分形模型求解离散事件的切换瞬态过程,即纳秒级电磁瞬态过程,结果与实验结果吻合(该模型的仿真耗时为608 s)。目前尚没有其他商业软件具备仿真此类大规模系统开关瞬态过程的能力;其他软件只能近似地将离散事件视为瞬时事件[图10(d)]。数值凸透镜的精度和速度使兆瓦级电力电子系统的设计和分析发生了极大的变化:设计人员都能够高效准确地验证其设计方案,研究系统多
《图10》

图10 2 MW EER系统的数值实验。(a)EER样机和内部结构图,以及时间离散和状态离散方法原理的比较。(b)、(c)数值凸透镜与基于时间离散的商业软件之间仿真结果(b)和仿真速度(c)的比较。(d)数值凸透镜与使用理想开关模型的商业软件之间的开关电流仿真结果的比较。
时间尺度动力学行为,引入人工智能算法实现自动化设计和迭代等。
本文进一步仿真了EER的另一种工况,以证明所提出的数值凸透镜能够分析系统多个时间尺度动力学行为的相互作用。在真实的EER系统中,在交流高频母线上可以观察到2 MHz的高频振荡[42]。由于图10所示的拓扑结构,这种2 MHz的振荡对系统的稳定运行有很大的影响。它会产生显著的电磁干扰(electromagnetic interference, EMI)并导致控制系统发生故障。这种高频行为高度依赖于小时间尺度的开关瞬态,同时对系统的整体性能也有很大影响。因此,这一现象是系统中多个时间尺度之间紧密联系的典型场景[43]。利用数值平台,我们研究了传统栅极驱动[图11(a)]和主动栅极驱动(主动驱动的设计细节见参考文献[43])[图11(b)]的高频振荡现象。仿真结果表明,使用主动控制的栅极驱动可以在很大程度上减轻高频振荡,从而减轻相应的EMI干扰。
《图11》
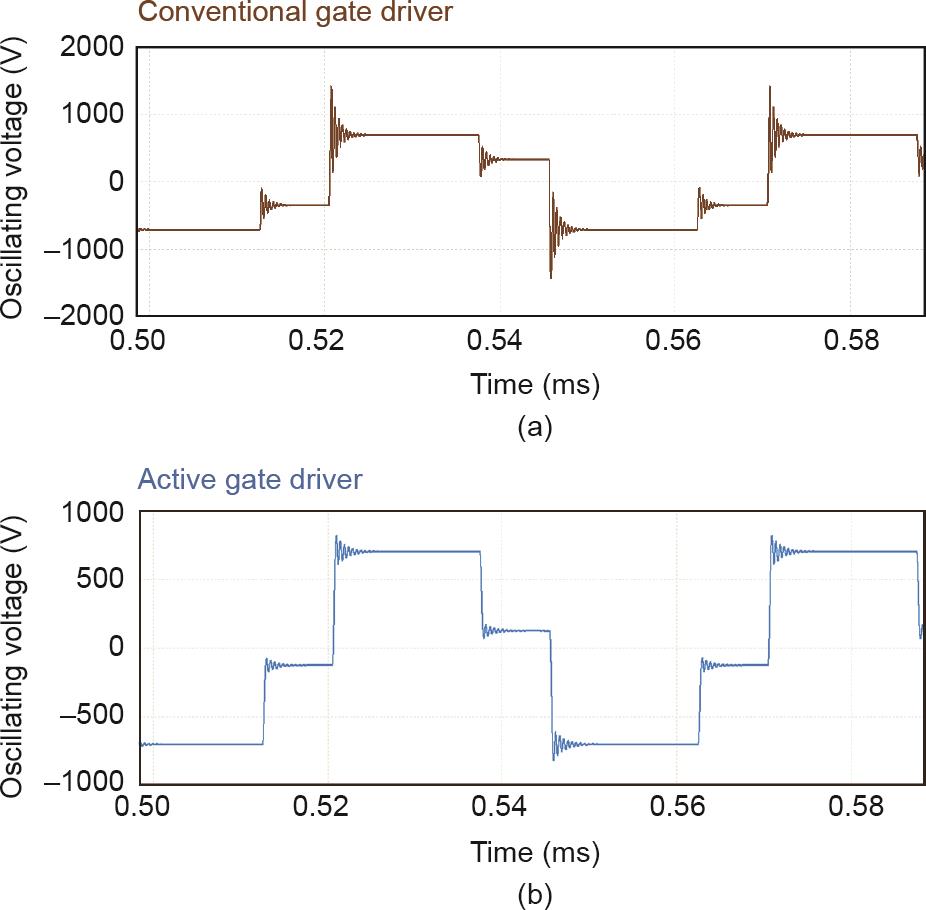
图11 传统栅极驱动(a)和主动栅极驱动(b)下的高频振荡仿真结果对比。
《5. 结论》
5. 结论
尽管时间离散的建模仿真方法已经能够较好地解决纯连续系统数值解算的问题,但对于目前工程应用中更加复杂的广义混杂系统则难以高效解算。此类系统包含了多个时间尺度的连续状态和离散事件。为了解决这一瓶颈,本文提出了数值凸透镜方法,实现了广义混杂系统的状态离散建模和仿真。在所提出的方法中,仿真计算点由数值凸透镜的成像触发,其中成像过程代表系统状态的离散化。因此,离散点可以自然地与广义混杂系统内的离散事件匹配。
本文所提出的思想方法可以广泛应用于多个工程领域中一般性的广义混杂系统。我们在兆瓦级、大规模电力电子系统中应用并验证了所提出的方法,基于所提出的方法实现了1000倍的仿真提速。此外,本方法具有在这种大规模系统中仿真纳秒级开关瞬态过程的能力,没有发散问题。本方法将提高工程系统数值实验的计算能力,解决广义混杂系统建模仿真的瓶颈问题。











 京公网安备 11010502051620号
京公网安备 11010502051620号




