
《1. 引言》
1. 引言
在未来基于第六代移动通信技术(6G)构建的网络中,前沿技术的关注重点将从人类转向智能机器[1]。与人类不同的是,这些机器通常分布在偏远地区[1],而在这些地区建设机器的目的是为了完成对时延十分敏感的工业生产任务[2-3]。因此,在即将到来的6G时代,在广域构建时延敏感物联网(IoT)的需求正在不断增加[1-3]。
然而,事实上地面基础设施难以在偏远地区部署[4-6],因而地面蜂窝网络在覆盖能力方面将会存在盲区[7]。因此,很难使用传统的第四代移动通信技术(4G)和第五代移动通信技术(5G)为偏远地区的机器提供服务。考虑到这一挑战,采用包括卫星和无人机(UAV)的非地面基础设施,来进行广域时延敏感IoT的设计是有益的,因此需要建立一个非地面网络(NTN)。特别是,需要一个具有特定覆盖模式的NTN为机器提供按需覆盖,以适应机器在偏远地区“沙漠绿洲”状(oasis-oriented)的不均匀分布。上述分析表明,NTN应在无蜂窝的网络架构下进行设计[8]。此外,由于机器对时延敏感业务的需求,来自机器的数据必须尽快由NTN完成处理。为了实现这一功能,动中通天线和边缘服务器可以一起被放在无人机上,以便NTN既能在卫星和UAV之间建立高速通信链路[9],也能在UAV上使用移动边缘计算(MEC)[10]快速处理数据。基于这种网络设计方法,我们可以在无蜂窝架构下构建MEC使能的NTN。然而,通信和MEC在NTN中会相互耦合,同时也会有复杂的传播环境影响,这些因素为NTN的设计带来了新的挑战。首先,由于偏远地区的复杂传播环境,在无蜂窝架构下实现“沙漠绿洲”状的按需覆盖设计是一项挑战[8]。此外,由于通信和MEC系统相互耦合,资源的协同编排设计方法也会更加复杂[10]。因此,我们需要研究MEC使能的NTN的具体设计方法,使这种网络能够进一步被用于广域时延敏感IoT。
《2. 文献综述》
2. 文献综述
对于广域IoT,窄带物联网(NB-IoT)是在传统蜂窝结构下设计的一种使能技术[11],而远程无线电(LoRa)技术的提出进一步扩大了IoT的覆盖范围[12]。此外,时延敏感网络(TSN)的提出在世界范围内引起了广泛关注,这种网络能够服务于时延敏感型的机器通信,其中工业自动化是主要的应用场景[13-15]。Lo Bello等[13]概述了TSN对各种工业系统的适用性。Liang等[14]对无线工业-工厂自动化(WIA-FA)技术及其应用场景进行了全面的调研。Luvisotto等[15]评估了无线高性能(WirelessHP)技术用于工业无线网络的可行性。这些研究促进了第三代合作伙伴计划(3GPP)构建的5G高可靠低时延通信(URLLC)[16]和工业IoT [17]的标准化。
由于地面蜂窝网络的覆盖盲区,NTN可能在6G中有一定的优势,其中NTN的标准化已在3GPP标准的第16版(R16)中启动[18]。未来,支持广域时延敏感IoT的NTN设计将在3GPP标准的第17版(R17)[19]中讨论。在现有研究中,基于卫星的IoT已被广泛讨论,因为它可以为广域IoT提供无处不在的覆盖[20-22]。De Sancrics等[20]研究了基于卫星的超远距离IoT的协议和体系结构。Cioni等[21]研究了卫星支持的大规模机器型通信(MMTC)的机遇和挑战。Zhen等[22]提出了一种优化的导频信号设计方法,该方法能够适应基于卫星的MMTC的以组为单位的随机接入模式。然而,基于卫星的IoT系统存在高时延和低效率等问题[20-22],这些问题导致基于卫星的IoT难以满足智能机器的通信要求[1]。
此外,UAV有潜力为广域时延敏感IoT提供按需服务[23-26]。在参考文献[23]中,针对基于UAV的IoT,论文提出了一种低时延路由算法,该算法使用无人机群设计了一种层次化的网络架构。参考文献[24]中提出了基于UAV的IoT设计方法,目的是支持实时的远程虚拟现实。参考文献[25]对IoT设备的上行链路(UL)功率进行了优化,以设计基于UAV的URLLC网络。在这篇文献中提出了基于UAV的全方位信任评估系统的设计方法,旨在从IoT设备可靠地收集数据[26]。为了进一步提高时延性能,现有研究进一步考察将基于UAV的IoT与MEC紧密融合[27-32]。参考文献[27]对UAV的三维部署进行了优化,以支持对时延敏感的IoT,其中UAV以云的形式进行组织。如参考文献[28]所述,作者提出的算法能够使基于UAV的MEC网络中的用户平均时延最小化。在参考文献[29]中,作者提出的方法面向智能IoT社区对无人机的轨迹进行了优化,其中也讨论了基于增强现实的案例分析。参考文献[30]考虑到严格的时延要求,提出了一种节能的多维度资源分配方案。在参考文献[31]中,作者提出了一种安装在UAV上的在线MEC服务器调度方案,该方案通过有效的资源利用机制保证了用户之间的时延公平性。此外,这篇文献还建立了一个基于多UAV的任务卸载系统,这一系统能够以可靠的方式让数据从IoT设备传输到MEC服务器上[32]。然而,基于UAV的网络通常缺乏持久性和稳定性[33],这些缺点在设计广域时延敏感IoT时将不可避免地成为使用UAV作为基站时的限制因素。
因此,将卫星和UAV与MEC联合使用有利于设计广域时延敏感IoT [10,34-35]。在参考文献[34]中,Liu等人提出了一种面向IoT的空-天-地-海一体化网络以任务为中心的智能体系结构。Cheng等[10]研究了面向IoT的空-天-地协同网络计算资源分配和任务卸载策略的联合设计,这一方案考虑了严格的时延约束,同时使用了一种基于学习的算法。Cao等[35]讨论了在风的影响下卫星UAV协同网络中UAV航迹和任务卸载策略的耦合问题。尽管现有研究已取得了上述进展,但在网络的无蜂窝架构下,当NTN与MEC需要进行一体化设计时,我们将遇到新的挑战。首先,由于复杂的传播环境,NTN无法完美地获取信道状态信息(CSI),这一问题导致在实现面向“沙漠绿洲”状分布的机器的按需覆盖时,网络设计方法十分复杂。其次,由于通信系统和MEC系统相互耦合,因此在MEC使能的NTN中无法以简单的方式实现通信和计算资源的协同编排。在之前的研究[8]中,我们讨论了卫星UAV协同网络的无蜂窝覆盖模式。在本研究中,我们继续针对广域时延敏感IoT的特点,讨论MEC使能的NTN的设计方法。表1 [11-12,14-17,20-22]总结了现有技术与相应研究领域之间的关系。
《表1》
表1 现有技术和本文关注的研究领域
| Specific area | Latency requirement | Coverage pattern | Technology | Refs. |
|---|---|---|---|---|
| Wide-area IoT | Large latency allowed | Cellular-based | NB-IoT | [ |
| Expanded cellular | LoRa | [ | ||
| Ubiquitous | Satellite-based IoT | [ | ||
| TSN | Sensitive to latency | Indoor | WIA-FA | [ |
| WirelessHP | [ | |||
| Cellular-based | 3GPP 5G URLLC | [ | ||
| 3GPP Industrial IoT | [ | |||
| Wide-area time-sensitive IoT | Oasis-oriented under a cell-free architecture | MEC-empowered NTN |
《3. 研究贡献》
3. 研究贡献
本研究提出了一种用于广域时延敏感IoT的MEC使能的NTN的设计方法。特别地,本文专注于NTN的设计,这一网络拟由卫星和UAV通过层次化协同的方式组成,同时考虑总的通信和计算时延作为网络时延性能的度量。本研究中的MEC使能的NTN将以时分方式在面向过程的优化框架下进行设计[8],以满足广域时延敏感IoT的服务需求,其中将基于大尺度CSI来建立使时延最小化的优化问题。随后,本文提出了一种面向过程的联合资源编排方案来求解上述时延最小化问题。本研究的主要贡献总结如下:
(1)针对MEC使能的NTN,本文提出了一个面向过程的优化框架。该框架可以以时分方式为层次化集成的卫星和UAV联合设计通信和MEC系统。随后,本文提出了一个总通信和计算时延最小化问题,其中在建模时使用大尺度CSI以可承受的代价刻画复杂的传播环境。
(2)由于本研究考虑的时延最小化问题是一个非凸的随机优化问题,本文首先证明了原问题可以转化为一个简化形式。随后,提出了一个对简化后问题的近似方法,这使得近似后的问题可以根据总通信和计算效率函数的性质进一步分解为多个子问题。
(3)本研究提出了一种联合功率分配和数据流调度方案来分别求解多个子问题,其中应用了块坐标下降和逐次凸近似技术。提出的方案以迭代的形式给出了面向过程的多维度资源联合编排方案。
本文的其余部分组织如下:第4节介绍系统模型和面向过程的优化框架;第5节介绍时延最小化问题的解决方案,其中引入了联合功率分配和数据流调度方案;仿真结果和讨论见第6节;结论见第7节。
《4. 系统模型》
4. 系统模型
图1展示了由层次化协同的卫星和UAV组成的MEC使能的NTN,其具有U个单天线IoT设备以及配备MEC服务器和M个天线的K个组成集群的UAV,同时有一个可通过网关将数据发送回云服务器的卫星。假设无人机沿着预定的圆形轨道围绕IoT设备飞行。这种模式可以在保证稳定性的情况下节约能源[36]。为了适应广域时延敏感IoT中的设备分布,本系统在无蜂窝架构下设计了层次化的NTN [8],其中可以观察到“沙漠绿洲”状的覆盖模式。基于这种覆盖模式,可以预先确定IoT设备和UAV之间的关联关系。为了简化数学分析,用户关联的指标集被表示为
《图1》
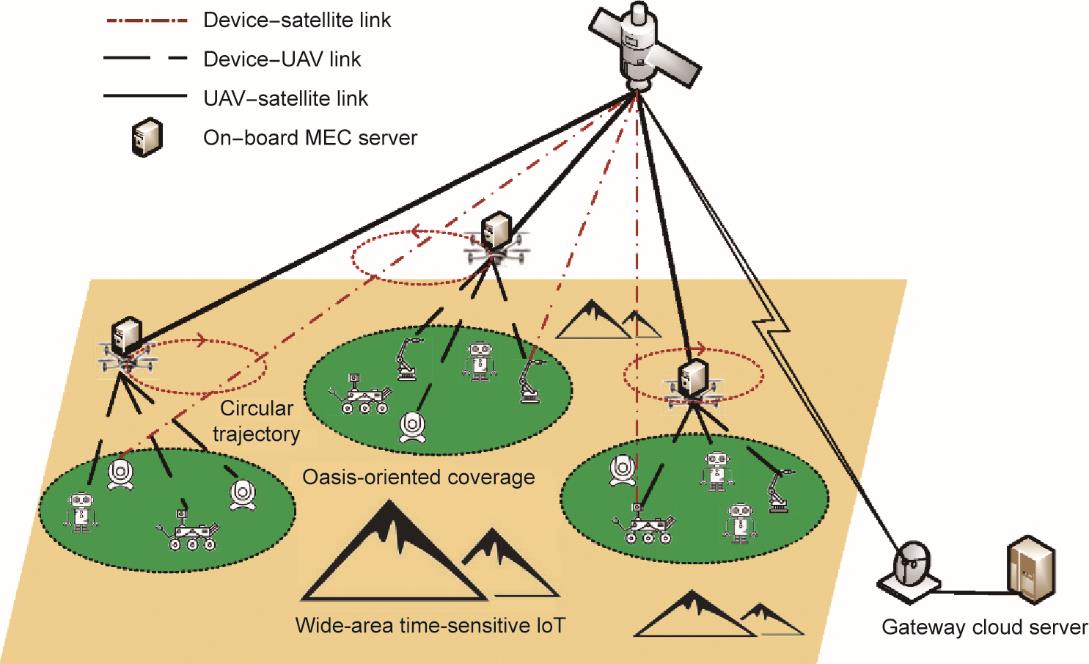
图1 面向广域时延敏感IoT的MEC使能的层次化NTN示意图。
在实际系统中,每个IoT设备的计算能力通常较弱,因此,IoT设备必须向卫星或UAV上传数据,以完成计算密集但时延敏感的任务[10]。在这一系统中,当云服务器成功接收到来自设备的所有数据后,我们认为整个通信和计算的过程结束[37-38]。我们假设第u个设备要上传的数据量为D。假设通信和计算过程在面向过程的框架下设计,这种设计框架能够管理UAV的移动性对数据传输的影响,从而降低优化整个过程的复杂程度[8]。如图2所示,在提出的框架下整个过程被划分为NT段。MEC使能的NTN的参数在每个时间段开始时更新,并假设在每个时间段期间这些参数是恒定不变的,并在不同的时间段中这些参数可能彼此不同。系统参数的更新间隔可表示为
(1)
(2)
《图2》
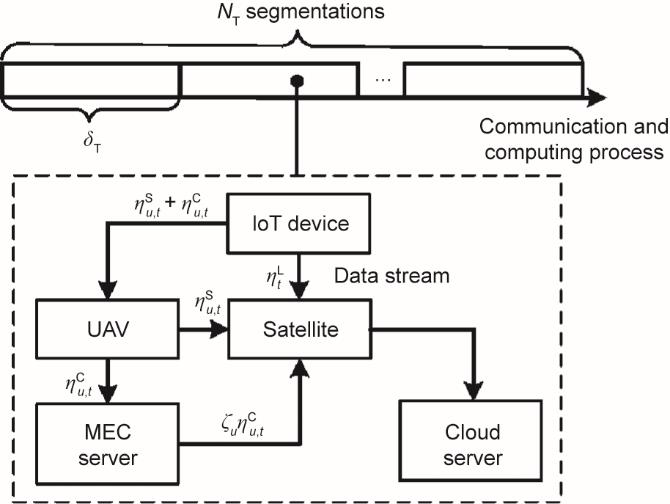
图2 在MEC使能的NTN中的面向过程的优化框架示意图。
在过程的每个时间段中,来自IoT设备的数据首先将传输到卫星或UAV上。在无蜂窝架构下,假设所有设备共享相同的频带[8],其中假设带宽为B。当IoT设备直接连接到卫星时,假设设备和卫星之间的UL速率为常数[41],即RL。此外,当IoT设备与UAV连接时,这些设备和UAV共同组成用于数据传输的多用户多输入多输出(MU-MIMO)UL系统。因此,第t个时间段中来自第k个UAV的第u个用户的接收信号公式可表示如下:
(3)
式中,
(4)
式中,
(5)
式中,
(6)
(7)
式中,
(8)
式中,
在本系统中,从设备到UAV的数据传输过程是在UAV起飞之前设计的,其时间尺度远远大于信道相干时间。因此,使用导频符号,UAV可以在信道相干时间内准确地估计式(4)中的UL CSI;然而,考虑到整个过程相对更大的时间尺度,在UAV起飞之前无法完全获得准确的CSI。因此,在设计数据传输过程时很难使用完美的CSI。特别地,我们将位置相关参数,即
(9)
式中,
在UAV从设备接收到数据流后,这些数据流被进一步调度用于通信和计算。为了保证系统稳定性,假设该系统在非阻塞模式下工作[39],其中数据流中的任何数据包都可以从设备传输到云服务器,而无需经过任何等待时间。因此,数据流的约束可表示如下[39]:
(10)
(11)
式中,
如果只有卫星被用于通信,则
(12a)
如果UAV只被用于通信,其上的MEC服务器不被用于计算,则
(12b)
如果UAV及其上的MEC服务器同时被用于通信和计算,则
(12c)
如式(12a)~(12c)所示,
基于式(1)~(12),本研究关注的时延最小化问题可表示为如下形式:
(13a)
(13b)
(13c)
(13d)
(13e)
(13f)
(13g)
式中,
《5. 面向过程的优化框架下的功率分配和数据流规划联合设计方法》
5. 面向过程的优化框架下的功率分配和数据流规划联合设计方法
《5.1. 问题分解》
5.1. 问题分解
通过观察式(13a)~(13d)可以发现,式(13)是一个非凸随机优化问题,难以使用现有工具直接求解。为进一步简化公式(13),给出
(14)
式中,
(15)
根据式(14)和式(15),
《图3》

图3 利用数值计算方法评估近似遍历速率的准确度。
基于式(14)和式(15), 式(13b)~(13d)中的
(16a)
(16b)
(16c)
(16d)
(16e)
(16f)
(16g)
(16h)
(17a)
(17b)
(17c)
(17d)
(17e)
(17f)
(17g)
(17h)
(18a)
(18b)
(18c)
(18d)
(18e)
(18f)
(18g)
(18h)
不难证明子问题式(16)~(18)相互独立。为了简单起见,如果将
《5.2. 的求解方法》
5.2. 的求解方法
根据式(16)中的约束条件,我们发现:式(16c)~(16g)对式(16a)中的目标函数没有影响。因此,式(16)可以等效地转换为:
(19a)
(19b)
(19c)
其中这一问题的解可以直接表示为:
(20)
此时系统参数的最小更新间隔可表示为:
(21)
备注1: 当仅使用卫星传输数据时,式(16)的解给出了联合资源编排方案。直观地说,我们证明了当
《5.3. 的求解方法》
5.3. 的求解方法
由于式(17b)~(17d)中
(22a)
(22b)
(22c)
(22d)
(22e)
(22f)
(23a)
(23b)
(23c)
(23d)
(23e)
(23f)
(23g)
式中,i为迭代索引。式(22)为功率分配子问题,式(23)表示数据流调度子问题。在下一部分,我们讨论式(22)和式(23)的求解方法。
《5.4. 的求解方法》
5.4. 的求解方法
不难证明式(22)是非凸的。根据文献[48]中的定理1,在将泰勒展开式应用于式(22b)、式(22c)和式(22d)之后,可以使用逐次凸近似技术迭代求解式(22)中的问题[49]。将迭代指数表示为j,式(22)中的问题可转化为:
(24a)
(24b)
(24c)
(24d)
(24e)
(24f)
式中
(25)
(26)
(27)
(28)
(29)
随后,可根据以下性质给出式(24)的解。
性质1:式(24)中的优化问题是凸的,其最优解是式(22)的一个可行解。
证明:见附录A。
性质1表明,可以使用传统的凸优化工具[46]求解式(24),这也表明可以使用式(24)的解迭代推导式(22)的解。算法1给出了该迭代方法的详细步骤。
《5.5. 的求解方法》
5.5. 的求解方法
可以看到式(23)中的问题是非凸的,这是因为式(23b)相对于
(30a)
(30b)
(30c)
(30d)
(30e)
(30f)
(30g)
我们发现式(30)是一个关于
在式(22)和式(23)中的问题得到求解后,根据块坐标下降技术[8],可通过联合使用算法1和算法2迭代得出式(17)的解。算法3总结了所提出的联合资源编排方案的详细步骤。
《5.6. 的求解方法》
5.6. 的求解方法
将式(18b)与式(17b)进行比较,我们可以得到以下性质:
性质2:式(18)的最优解必须满足
证明:观察到式(18b)与
使用性质2,式(18)可被化简为:
(31a)
(31b)
(31c)
(31d)
(31e)
(31f)
(31g)
上述问题可在
备注2: 式(17)和式(18)的解之间最重要的区别在于是否具备使用MEC进行计算的可能性。与备注1中的讨论类似,当
在算法1~3的基础上,我们提出了一种面向过程的联合资源编排方案,用于求解式(13)。方案的具体设计如算法4所述。从结果的角度看,使用算法4可以使系统获得最小的总通信和计算时延。
《5.7. 收敛性分析》
5.7. 收敛性分析
这里,分析算法1~3的收敛性。对于式(24)中的问题,在第j个迭代步骤中,有
(32)
因为根据性质1,
(33)
类似地,对于在第j个迭代步骤中式(30)中的问题,有
(34)
以上公式表明算法2可以保证收敛。因此,
(35)
根据式(32)~(35),可以得到:
(36)
这表明式(17a)中的目标函数随着i的增加而继续减小。由于式(17h)中的限制,目标函数一定存在一个下限。因此,以上分析证明了算法3的收敛性,并且证明了这一算法可以导出式(17)的局部最优解。
《6. 仿真结果与讨论》
6. 仿真结果与讨论
本文使用数值仿真来评估所提出算法的性能。NTN的参数设置为K = 7、M = 8以及U = 56,其中U个IoT设备分为K个用户组,每个设备与最近的UAV关联。根据参考文献[51]中的讨论生成设备和UAV的位置,其中用户聚集度设置为
首先,本研究通过数值仿真来评估所提出算法的收敛性能,其中设置
《图4》

图4 提出的算法的收敛性能。
随后,将提出的算法与其他方案进行了性能比较。首先,考虑一个简单的方案,即仅使用卫星进行通信。此外,还考虑了以下三个方案:
• 方案1:使用参考文献[37]中提出的带宽分配方法在多个设备之间分配总带宽,其中使用最大传输功率并应用贪婪的数据流调度策略,这一策略的实现可参考文献[10]中的方法。
• 方案2:将每个设备的传输功率设置为相等[8],其中为了满足数据流的约束,使用了功率回退的策略。同时,应用贪婪的数据流调度策略,这一策略的实现可参考文献[10]中的方法。
• 方案3:使用所提出算法的简化版本,其中假设
在仿真中,设置
《图5》
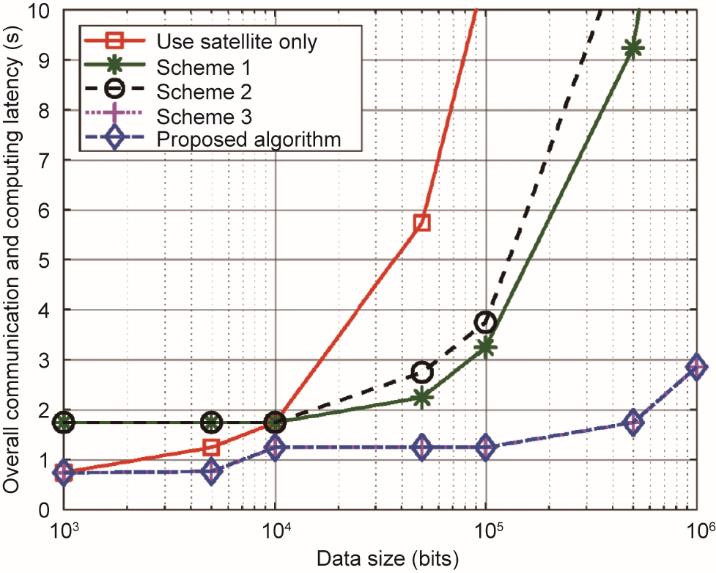
图5 当D较小时不同算法之间的对比。
《图6》
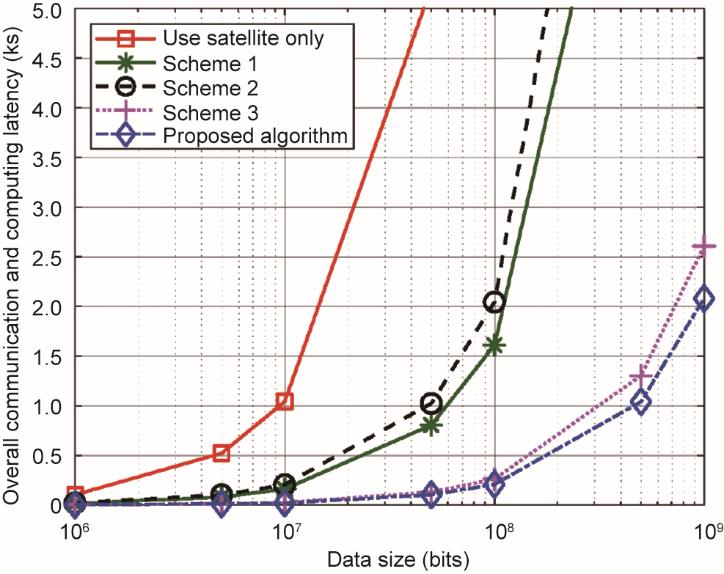
图6 当D较大时不同算法之间的对比。
《表2》
表2 在数据量不同时的总计算与通信时延
| Data size | Overall communication and computing latency derived by using the proposed scheme | ||
|---|---|---|---|
| Only use satellite for communication (s) | Use satellite and UAVs for communication without MEC (s) | Use satellite and UAVs for communication with MEC (s) | |
| 1 kbit | 0.74 | 1.24 | 1.74 |
| 10 kbit | 1.74 | 1.24 | 1.74 |
| 100 kbit | 10.74 | 1.24 | 1.74 |
| 1 Mbit | 104.74 | 5.24 | 3.24 |
| 10 Mbit | 1.04 × 103 | 46.24 | 22.74 |
| 100 Mbit | 1.04 × 104 | 451.24 | 213.24 |
| 1 Gbit | 1.04 × 105 | 4.50 × 103 | 2.12 × 103 |
图7中的曲线用于评估当过程使用不同的时间段数时,由所提出算法优化得到的最小总时延,其中设置
《图7》
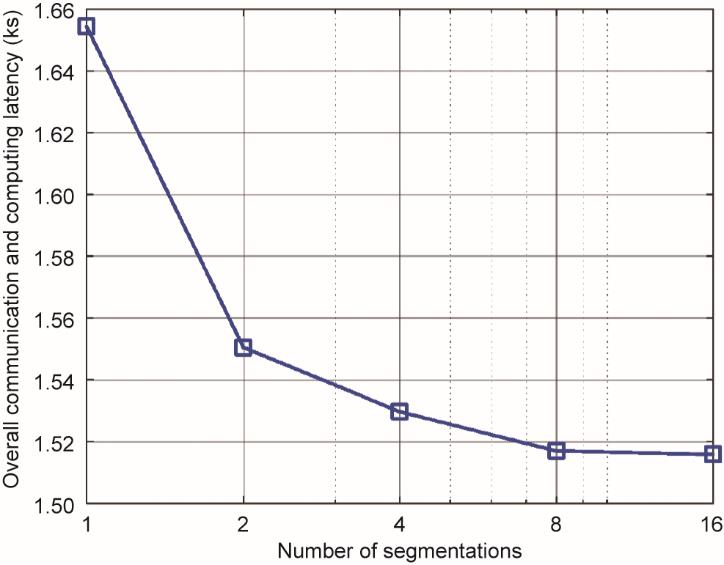
图7 总计算和通信时延与时间段数之间的变化关系。
图8中的曲线用于研究UAV的有效载荷对所提出算法的时延性能的影响,其中MEC服务器的平均吞吐量和UAV-卫星链路的最大数据传输速率不同。在这个仿真中,设置
《图8》
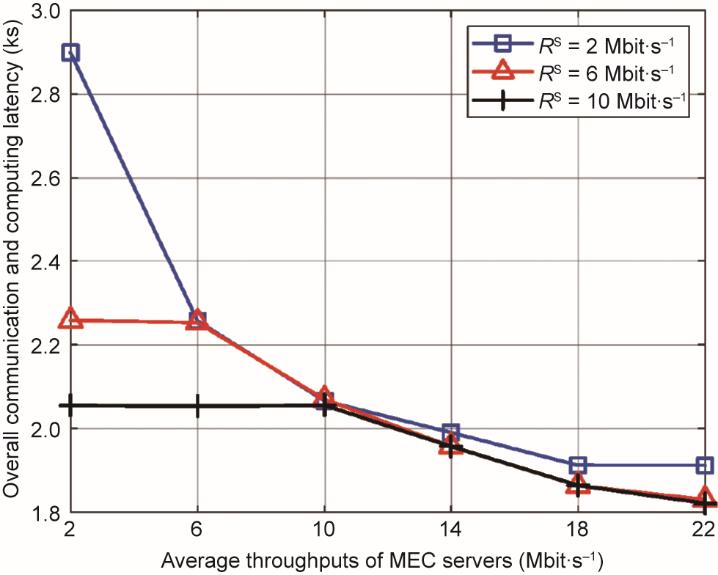
图8 在UAV-卫星链路的最大数据速率变化的条件下,总计算和通信时延与MEC服务器的平均吞吐量的关系。
图9用于讨论用户分布对系统时延性能的影响,其中考虑MEC服务器的平均吞吐量的变化。在仿真中,设置
《图9》
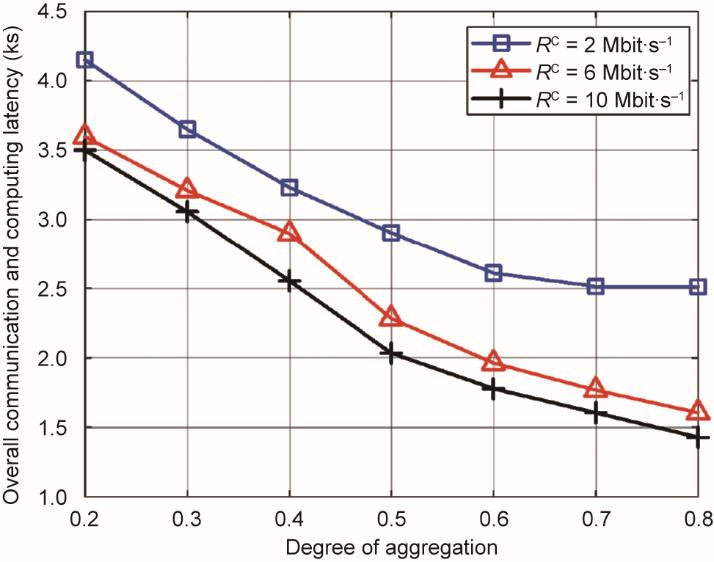
图9 在MEC服务器的平均吞吐量不同时,总计算和通信时延与用户聚合度的关系。
此外,我们评估了使用不同数量的IoT设备时网络时延性能的变化,如图10所示。在仿真中,设置
《图10》
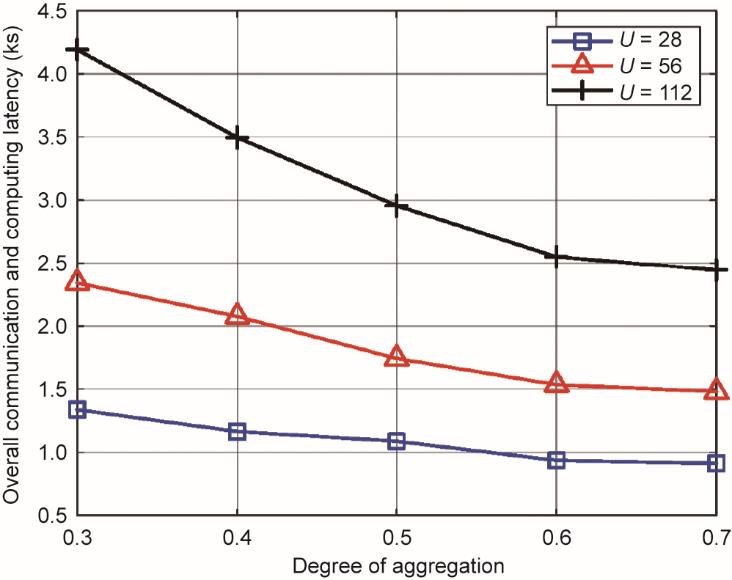
图10 在IoT设备数量不同的条件下,总计算和通信时延与用户聚合度之间的关系。
图11中的曲线用于探索UAV位置和系统时延性能之间的关系,其中设置
《图11》
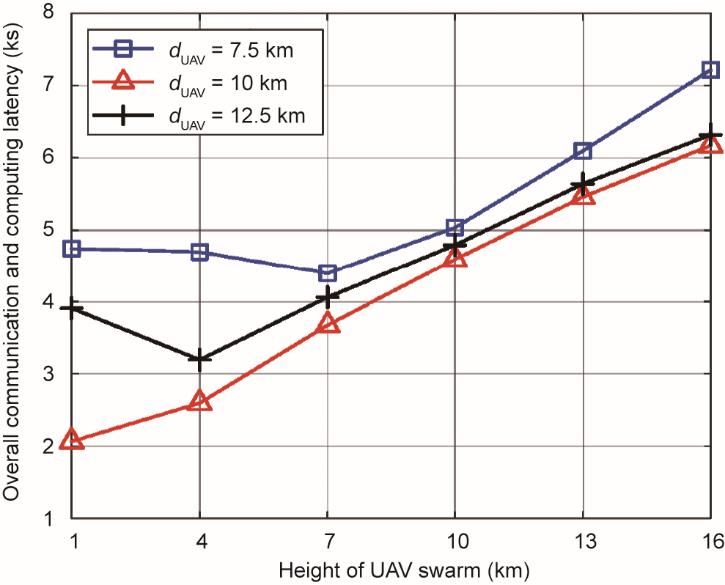
图11 总计算和通信时延与UAV集群高度间的关系,其中不同UAV间的距离也在变化。
《7. 结论》
7. 结论
在本研究中,我们讨论了用于广域时延敏感IoT的MEC使能的NTN的设计方法。为了联合设计层次化集成的卫星和UAV的通信及MEC系统,本文以时分方式提出了一个面向过程的优化框架。在此框架下,本文利用大尺度CSI提出了一个时延最小化问题。随后,将问题转化为简化形式,并进一步导出简化问题的近似问题。根据总通信和计算效率函数的性质,将近似问题分解为多个子问题。此外,通过联合使用块坐标下降和逐次凸逼近技术,本文提出了一种迭代算法来解决这些子问题。利用子问题的解,本文为MEC使能的NTN提出了一种面向过程的联合资源编排方案。仿真结果表明,与其他比较算法相比,本文提出的算法具有更高的性能。此外,仿真结果表明,所提出的面向过程的方案能够灵活地适应不同的数据量。结果显示,在实际系统实现时应适当预先设计UAV的有效载荷部署,以提高MEC使能的NTN的资源使用效率。最后,本文得到的结果表明,对于广域时延敏感IoT,将NTN与MEC相结合是能获得足够的增益的。











 京公网安备 11010502051620号
京公网安备 11010502051620号




