
《1、 引言》
1、 引言
口径为500 m的球面射电望远镜(FAST)于2016年在中国贵州省建成,是世界上最大、最强的单碟射电望远镜。口径110 m全可动的奇台射电望远镜(QTT)现已开始筹建,建设单位为中国科学院新疆天文台。建成后,它将成为世界上最大口径的全可动射电天文望远镜[1‒2]。虽然FAST在3 GHz以下的工作频段比QTT要灵敏得多,但它的天空覆盖范围有限;相比之下,QTT将在150 MHz至115 GHz的工作范围内运行,并具有全天空覆盖的功能。
QTT的天空覆盖范围和频率覆盖范围将使其成为一种用途非常广泛的仪器,可以观测许多分子线发射以及银河系中心,并大大提高脉冲星引力波测量的准确性。QTT所需的指向精度为2.5角秒(arcsec),这对于质量为6000 t、高度为100 m、反射表面积为26个篮球场面积的望远镜结构来说是极难实现的[3‒4]。以位于墨西哥普埃布拉省Sierra Negra山顶的大型毫米波望远镜(LMT)的指向误差为例[5],在误差补偿之前,LMT的服务环境、机械校准和伺服控制引起的指向误差分别为10.76角秒、5角秒和7.74角秒[6‒7]。但是,传统的设计思想对多个误差源一视同仁;因此,望远镜的最终指向精度非常有限[8]。为了满足QTT设计中极高的指向精度要求,测量中应识别关键误差源;然后,对关键误差源进行优先级控制。
望远镜的结构误差是影响其指向精度的关键因素。误差源主要涉及基座、反射面或轮轨的变形[9]。焊接轮轨是通过焊接制成的,单轨之间采用相对光滑的轮轨接头,可以使整体轮轨经久耐用。以高难度焊接工艺为代价的焊接轮轨适用于高精度和高负载的望远镜[10]。然而,轮轨的加工和焊接过程引入了随机误差,主要包括微观表面误差和宏观轮轨不平度[8,11‒12]。这两个尺度上的误差会导致望远镜的方位轴和俯仰角轴出现误差,从而影响指向精度[13]。
在早期轮轨误差对望远镜影响的研究中,研究人员通过测量仪器获得轮轨误差数据。通过几何转换公式,将不平度直接转化为望远镜方位角和俯仰角的误差[14]。此外,Pisanu等[15]考虑了轮轨误差和温度漂移引起的方位框架变形对指向精度的影响。Kong等[16]研究了轮轨误差测试数据并进行了实验以确定指向精度。然后根据测试数据分析了轮轨误差与指向精度的关系。此外,研究人员还研究了非线性轮轨误差对望远镜指向性能的影响[17]。先前的研究表明,轮轨误差是望远镜设计、建造和运行阶段必须不断考虑的关键误差源。轮轨的结构误差具有明显的多尺度性,但在误差建模中却没有考虑到这一点。因此,指向误差与轮轨误差之间的准确关系尚未建立。这一不足是本文提出的逆向设计策略的基础。
具有有限元建模(FEM)或时域有限差分(FDTD)的高级迭代计算通常用于表面性能预测。但是,这种传统的设计过程受到人为引导的固有误差的影响。本研究基于双尺度误差模型及该误差对望远镜指向的影响机理,提出一种轮轨表面的逆向设计方法,可有效搜索和优化表面结构的核心参数以达到用户要求的表面特性。该模型是一种有效的大型轮轨表面逆向设计技术,有助于减少传统曲面设计中的计算量和人力资源,避免复杂的专业迭代仿真和参数化扫描研究,可为缺乏机械知识的用户服务。
《2、 轮轨误差对望远镜指向精度的影响》
2、 轮轨误差对望远镜指向精度的影响
《2.1 轮轨误差测试数据来源与特征分析和验证》
2.1 轮轨误差测试数据来源与特征分析和验证
根据某些大型射电天文望远镜[如LMT、Robert C.Byrd Green Bank Telescope (GBT)]的大量实验数据分析结果,可以初步假设这些大型望远镜的轮轨误差数据服从高斯分布[18]。在实际工程应用中,这一结论还应通过使用偏度系数法和峰度系数法等测试方法进行验证[19‒20]。这两种方法的详细描述如下:
(1)
(2)
式中,
如果不均匀测试数据的偏度和峰度都接近于零,则可以确认数据集整体服从高斯分布。对于一组测试数据样本,如果计算的偏度为正,则与数据集遵循标准高斯分布的情况相比,峰度呈现出向较小值侧的偏差。相反,如果计算的偏度为负,则与数据集遵循标准高斯分布的情况相比,峰度呈现出向较大值侧的偏差。如果峰度计算为正,则该分布相对标准高斯分布更锐利。但是,如果计算峰度为负,则该分布相对标准高斯分布更平坦。如果测试数据服从高斯分布,那么偏度和峰度也相应地服从高斯分布,数学期望值为零。偏度和峰度的均方根(RMS)值可以表示如下:
(3)
(4)
式中,
假设轮轨误差的测试数据服从高斯分布,则置信度系数α可以设置为0.05(α=0.05)。当偏度系数Sk > 1.96 σs和峰度系数Uu > 1.96 σu时,假设无效,测试数据集不服从高斯分布。否则,假设成立;也就是说,测试数据集服从高斯分布。
《2.2 轨道误差的双尺度模型》
2.2 轨道误差的双尺度模型
轮轨的结构误差主要包含两个方面:单轨加工产生的随机误差和轮轨使用过程中重力引起的变形。这两种类型的误差具有不同的来源和分布特征[21‒22]。加工过程的误差是随机的,呈现高频率和小振幅特征。结果表明,它被确定为小尺度误差,并通过周期函数计算。另一方面,自重变形是系统性的,表现为低频大振幅;因此,它被描述为大尺度误差。基于两种尺度分布的特征,大尺度轮轨误差采用傅里叶级数[23]仿真,小尺度轮轨误差作为拟合残差,采用分形函数[24]建模。最后,建立了轮轨不平度的双尺度误差模型,如式(5)所示。
(5)
式中,
如式(5)所示,轮轨误差的拟合精度由
(6)
(7)
(8)
《3、 基于指向误差的轮轨误差允许值》
3、 基于指向误差的轮轨误差允许值
《3.1 轮轨误差对指向精度误差的影响》
3.1 轮轨误差对指向精度误差的影响
为研究轮轨误差对望远镜整体结构和指向精度的影响,本实验建立了4个坐标系,如图1所示。
《图1》

图1 望远镜坐标系示意图。B:反射体的方位角。
(1)大地坐标系(
(2)方位轴坐标系(
(3)俯仰轴坐标系(
(4)反射体坐标系(
如图2所示,黑线为方位坐标系中方位框架的初始位置。点1、2、3和4代表4个滚轮,它们的高度值为
(9)
(10)
式中,r是轮轨的半径。
《图2》
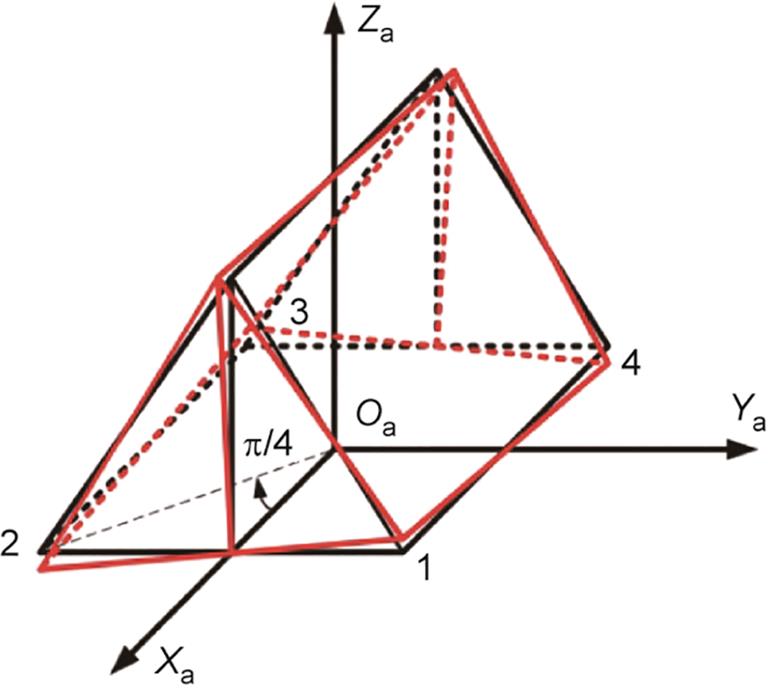
图2 轮轨误差引起的方位坐标系倾斜变形。
此外,轮轨误差导致方位架的变形;这会导致方位架本身的扭转,使俯仰角轴围绕Z轴旋转,如图3所示。由滚轮1和2之间的高度差引起的俯仰轴平移为
(11)
式中,he是俯仰轴的长度。
《图3》

图3 轮轨误差引起的方位架畸变。
轮轨不平度引起的方位坐标系摄动矩阵表示如下:
式中,
轮轨整体倾斜会导致方位轴倾斜,安装方位轴时初始偏移为零。考虑到轨道误差,坐标变换可表示为:
(12)
式中,
由轮轨误差引起的指向误差可以描述如下:
(13)
然后,可以将反射体坐标系中的指向误差转换为大地坐标系中的方位角和俯仰角误差。方位角误差为
(14)
式中,
如果只考虑轮轨误差对指向精度的影响,则
(15)
《3.2 轮轨误差容许值的逆向求导》
3.2 轮轨误差容许值的逆向求导
目前,望远镜指向精度的误差分布是一个复杂的工程问题,在设计阶段需要综合考虑多个因素[25]。通过结合工程经验、有限元结构分析、控制模型仿真、实测数据、工程估算等多种技术手段,可以确定各种误差源引起的分布式指向误差[26]。由于每个误差源都会影响望远镜的指向精度,因此可以假设由这些误差源引起的指向误差记为
(16)
根据第2节的验证结果,如果轮轨误差的测试数据服从高斯分布,则可以从概率统计的角度进一步推导出轮轨误差与指向精度的关系模型。相应地,在确定了轮轨误差(σ)的RMS后,就可以计算出由其引起的天线方位角和俯仰角的指向误差的RMS值。随后,可以基于获得的误差分布推导出允许的跟踪误差值。望远镜的简化如图4所示。
《图4》

图4 望远镜的简化示意图。
如图5所示,用4个点来支撑望远镜的方位架和轮轨,分别记为点1、2、3、4。方位架的底部结构是由这4个点组成的正方形。如果只考虑轮轨误差,则指向误差可描述如下:
《图5》

图5 望远镜方位架和轮轨支撑点的位置。
(17)
式中,
令
式(17)可简化为以下表达式:
(18)
假设
(19)
因此,
(20)
使用卷积定理,可以得到式(21):
(21)
式(21)具体表示为:
(22)
令
则式(22)可进一步表示为:
(23)
我们将
(24)
我们假设
(25)
(26)
因此,
(27)
式中,
我们将望远镜总指向误差中由轮轨误差引起的部分表示为
(28)
因此,
(29)
《4、 实验验证》
4、 实验验证
《4.1 GBT的实验验证》
4.1 GBT的实验验证
GBT是位于美国西弗吉尼亚州格林班克的国家射电天文台(NRAO)的射电望远镜,同时也是世界上几个最大的拥有单碟反射器的望远镜之一。目前,该望远镜由绿岸天文台运营。它高146 m,重7700 t。碟形天线尺寸为100 m×110 m;精度补偿后,最高指向精度为2角秒。GBT是典型的偏置射电望远镜,工作频率范围为0.1~116 GHz。GBT的轮轨由48条轮轨组成,直径为64 m,全长201 m。轮轨误差的RMS为0.0568 mm。
轮轨误差的测试方案描述如下[28‒29]。一块已知厚度和硬度的木板被放置在轮轨上以校准倾角仪。随后,旋转测距仪以测量轮轨。具体测量过程如下。首先将倾角仪安装在测距仪底部的4个滚轮装置上,并在滚轮下方放置一个钢盘。当轮子经过时,倾角仪会倾斜。如果方位架以恒定速度旋转,则通过放大或缩小钢盘厚度与倾角仪读数的比例来获得倾角仪读数与轨迹误差之间的关系。因此,该方法对轮轨的整体轮廓都进行了研究。采用这种基于数据分布特征的验证方案,本实验绘制了GBT轮轨误差测试数据的分布直方图,如图6所示。
《图6》
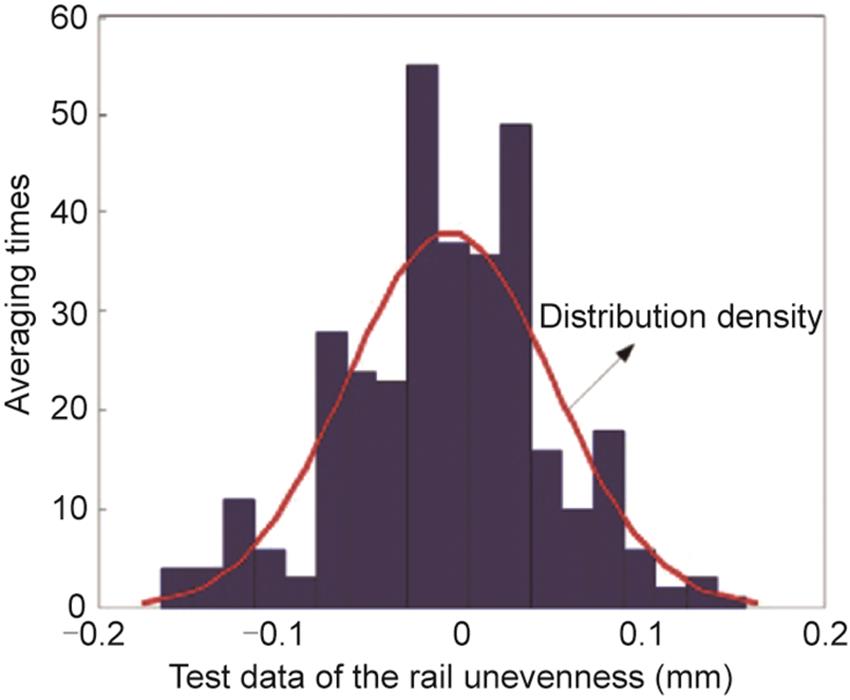
图6 GBT轮轨误差测试数据分布直方图。
通过相关系数检验法分析,GBT无标度区间范围为[0.116,0.901],分形维数采用基于小波变换的分形维数法求解,GBT的分形维数为
《图7》

图7 GBT轮轨误差对比研究。
为了测量指向精度,本实验首先确定了一个无线电源列表;然后,用望远镜进行了交叉扫描观察。在观测过程中,本实验记录了望远镜在相关时间内的指向精度和辐射功率。对射电点源在俯仰角或方位方向进行扫描观测后,得到了功率在俯仰角或方位方向的变化曲线。指向精度误差的存在导致功率最大值和无线电点源的位置偏差。因此,望远镜在俯仰角方向的指向精度误差是通过在俯仰角方向扫描射电点源得到的,通过在方位方向上扫描得到该方向上的误差。
以GBT为例,本实验根据测试数据和式(17)构建了指向误差模型。然后,对应的轮轨误差允许值由指向误差的RMS值反向推导,根据式(27)给定轨迹误差的允许值,重新计算指向误差并与测量值进行比较(
《表1》
表1 计算的指向误差与GBT的测量值之间的比较。GBT的口径为64 m,轮轨的RMS为0.0568 m (°)
| RMS | Pointing error | ||
|---|---|---|---|
| Calculated values (arcsec) | Measured values (arcsec) | Relative errors (%) | |
| 0.2591 | 0.2382 | 8.77 | |
| 0.2589 | 0.2407 | 7.56 | |
| 0.3663 | 0.3386 | 8.18 | |
《4.2 LMT的实验验证》
4.2 LMT的实验验证
LMT的口径为50 m,副反射面直径为2.5 m。它位于墨西哥普埃布拉州,是世界上最大的毫米波射电望远镜[30‒31]。其观测波段为0.85~4 mm (75~350 GHz),表面精度为0.07 mm,指向精度为1角秒。轮轨直径为39.6 m,由20条轮轨组成。轮轨误差的RMS为0.1697 mm。用于LMT的测试方案与用于GBT的相同。本实验使用基于数据分布特征的验证方案,还绘制了LMT轮轨误差的测试数据分布直方图,如图8和图9所示。
《图8》

图8 LMT轮轨误差测试数据分布直方图。
《图9》

图9 LMT轮轨误差对比研究。
表2给出了LMT的计算指向误差与测量值的比较,最大误差为6.5%。
《表2》
表2 LMT的计算指向误差与测量值的比较。LMT的口径为39.6 m,轮轨的RMS为0.1679 m (°)
| RMS | Pointing error | ||
|---|---|---|---|
| Calculated values (arcsec) | Measured values (arcsec) | Relative errors (%) | |
| 1.2399 | 1.3022 | 4.78 | |
| 1.2368 | 1.3228 | 6.50 | |
| 1.7513 | 1.8562 | 5.65 | |
《4.3 密云实验验证》
4.3 密云实验验证
北京密云50 m望远镜口径为32.5 m,由21条轨迹组成,全长102.1 m,RMS误差为0.3136 mm。根据相关系数检验方法,确定密云望远镜的无标度区间为[0.263,1.156],利用基于小波变换的分形维数法计算出50 m天线的分形维数为D = 1.1521,使用轨迹不平度函数进行建模,ε1=2%,ε2=25%,ε3=20%,密云天线轨迹不平度的局部描述如图10所示。
《图10》
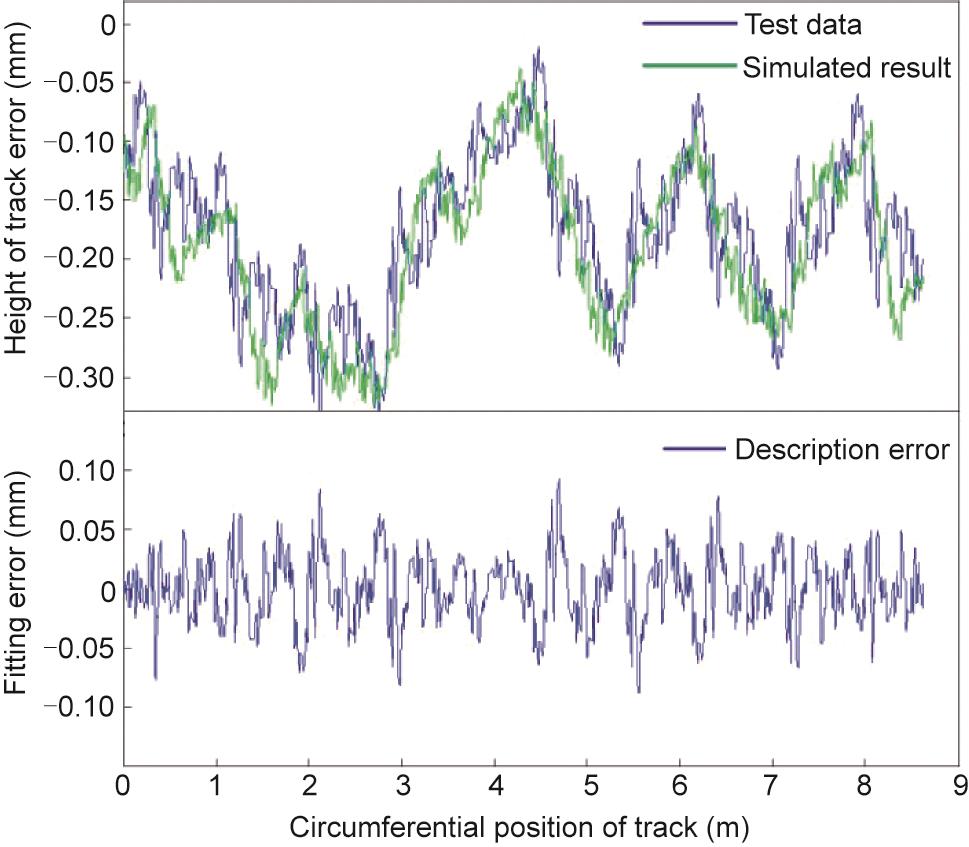
图10 密云望远镜轮轨误差对比研究。
《5、 结论》
5、 结论
传统的设计方案无法充分满足QTT等大比例望远镜极高的指向精度要求。为了降低QTT设计与制造的难度,本研究提出了一种轮轨表面的逆向设计方法。基于轮轨表面的误差特性,首先提出了双尺度模型来描述轮轨误差。然后,推导了轮轨误差对指向精度的影响机理。最后,使用这种策略,本研究从轮轨误差引起的指向误差中反向推导出轮轨误差的容许值。在GBT和LMT等望远镜工程上对所提的设计方法进行了实验验证。将所提出的方法与实测数据进行对比分析,结果表明本文所提出的设计方法是高效可行的。











 京公网安备 11010502051620号
京公网安备 11010502051620号




