
《1、 引言》
1、 引言
许多国家已将电动汽车(EV)列入促进能源转型的国家发展战略。过去10年,电动汽车的部署一直在迅速增长,2018年全球电动汽车的存量超过500万辆。在新政策情景下,2030年全球电动汽车存量将超过1.3亿辆[1]。随着电动汽车渗透率的提高,需合理调度电动汽车充电以避免造成配电网的负荷峰谷差和损耗的增加、线路过载和电压越限[2]。此外,电动汽车每天有90%的时间处于不行驶状态[3],且其电池具有快速响应系统需求的能力[4],因此电动汽车放电还可作为需求响应的重要组成部分以促进电力系统的优化和安全运行[5]。目前对电动汽车需求响应策略的研究[6‒8]大多以电动汽车充放电功率为控制变量来建立相关控制模型,并根据平滑可再生能源发电的不确定性和负荷波动[6,9]、降低成本或功率损耗[7,10‒11]、提供辅助服务等[2,12‒15]具体目标进行优化。而作为制定电动汽车需求响应策略的基础环节,电动汽车响应能力的评估具有重要意义。
大量电动汽车促使交通网和电网在地理空间上深度耦合。交通诱导信息影响下电动汽车用户的路线选择将决定电动汽车的入网状态。考虑用户出行需求和电网运行情况,电动汽车通过充放电实现与电网的交互。显然,电动汽车的响应能力在很大程度上取决于三个关键因素:①电动汽车入网状态,即电池状态(SOC)和入网时间;②由预计出发时间和所需SOC体现的用户出行需求;③直接决定交通诱导信息和电动汽车对电网响应的信息系统可靠性。
目前,电动汽车响应能力评估研究可分为两大类。第一类以SOC为指标。文献[16‒18]认为一旦SOC超过给定阈值,电动汽车就会放电,从而实现电动汽车响应能力的快速评估。但对用户出行需求的忽略使得放电后的SOC可能远低于实际需要。因此,第二类研究则在评估电动汽车响应能力的同时考虑用户出行需求。文献[19‒20]假设电动汽车只有在放电后SOC仍能满足用户需求时才放电,但却忽略了用户放电后再次充电的可能性。文献[21]将电动汽车入网时间与所需充电时间的差值作为评估电动汽车放电能力的指标。但该差值使用的相对指标不能反映响应能力的绝对情况。
计算电动汽车入网状态及其出行需求的三种常见方法包括基于随机变量的拟合法[22‒23]、出行链法[24‒25]及基于空间维度不确定性的方法[26‒28]。出行链法利用用户的出行目的地构建空间链,并结合交通网状态计算电动汽车的出行时间链,从而确定电动汽车的出行时间、里程等变量。与其他两种方法相比,该方法能考虑交通网络对用户出行行为的影响,真实地反映用户出行时间和距离之间的耦合关系。随电力物理网络和信息系统的深度融合,配电网络成为一个典型的信息物理系统(CPS),并被称为信息物理配电网络(CPDN)[29]。此外,智能配电网络的运行和控制也强烈而深刻地依赖于信息系统[30‒34]。
目前,广泛的CPDN可靠性评估研究可以分为两大类。第一类研究在分析信息系统与物理系统相互作用的基础上,修正电力物理网络中的元件可靠性模型,然后仍以传统方式分析后果并计算可靠性指标[35‒37]。第二类研究则关注强烈依赖于信息系统的特定功能,建立信息故障与功能故障之间的映射关系,然后再计算可靠性指标[29,38‒39]。尽管文献[40‒41]等电力系统可靠性评估工作已经考虑了电动汽车,但在确定电动汽车响应能力时,交通网和电网中的信息系统都被认为是完全可靠的,忽略了信息系统可靠性对可靠交通诱导信息提供及电动汽车-电网双向互动的影响。
为了有效评估电动汽车的响应能力,本文提出了一种新的考虑用户出行需求及集成于电网和交通网中的信息系统可靠性的评估方法。首先,提出了新的信息-电力-交通耦合系统架构,并提出了信息系统可靠性模型。然后,提出了考虑交通诱导信息可靠性的电动汽车入网状态计算方法。此外,基于所提出的反映用户出行需求的电动汽车充电需求松弛度指标实现了对电动汽车响应能力的评估。在由RBTS BUS6和北京交通网络构建的信息-电力-交通系统上进行了大量测试,验证了所提方法的有效性。
本文的其余部分组织如下。第2节介绍了信息-电力-交通耦合系统架构。第3节介绍了信息系统可靠性模型。第4节提出了考虑交通诱导信息可靠性的电动汽车入网状态计算方法。第5节进一步介绍了考虑用户出行需求的电动汽车响应能力的评估方法。第6节提供了算例结果并进行讨论,而第7节则对工作进行了总结和归纳。
《2、 信息-电力-交通耦合系统》
2、 信息-电力-交通耦合系统
图1显示了信息-电力-交通耦合系统的架构。电动汽车数量的增加促进了电网和交通网在地理空间上的耦合。电网和交通网的运行和控制都强烈而深刻地依赖于信息系统。对于电网,配电主站通过信息系统监测和控制电网,并通过电动汽车聚合商与电动汽车实现信息交互和充放电管理。对于交通网,交通控制中心采集实时交通数据后生成并发布交通诱导信息,电动汽车在此基础上进行出行路线选择。电网和交通网中信息系统的基本结构如下所述。
《图1》

图1 信息-电力-交通耦合系统架构。
《2.1 电网信息系统》
2.1 电网信息系统
如图2所示,配电网信息系统由骨干层和接入层组成。主干层是位于配电主站与配电子站/电动汽车聚合商之间基于同步数字体系(SDH)的网络。接入层包括两部分:配电子站和智能电子设备(IED)之间由光线路终端(OLT)和光网络单元(ONU)构建的以太网无源光网络(EPON),以及电动汽车聚合商和电动汽车之间基于EPON和Wi-Fi的网络。
《图2》
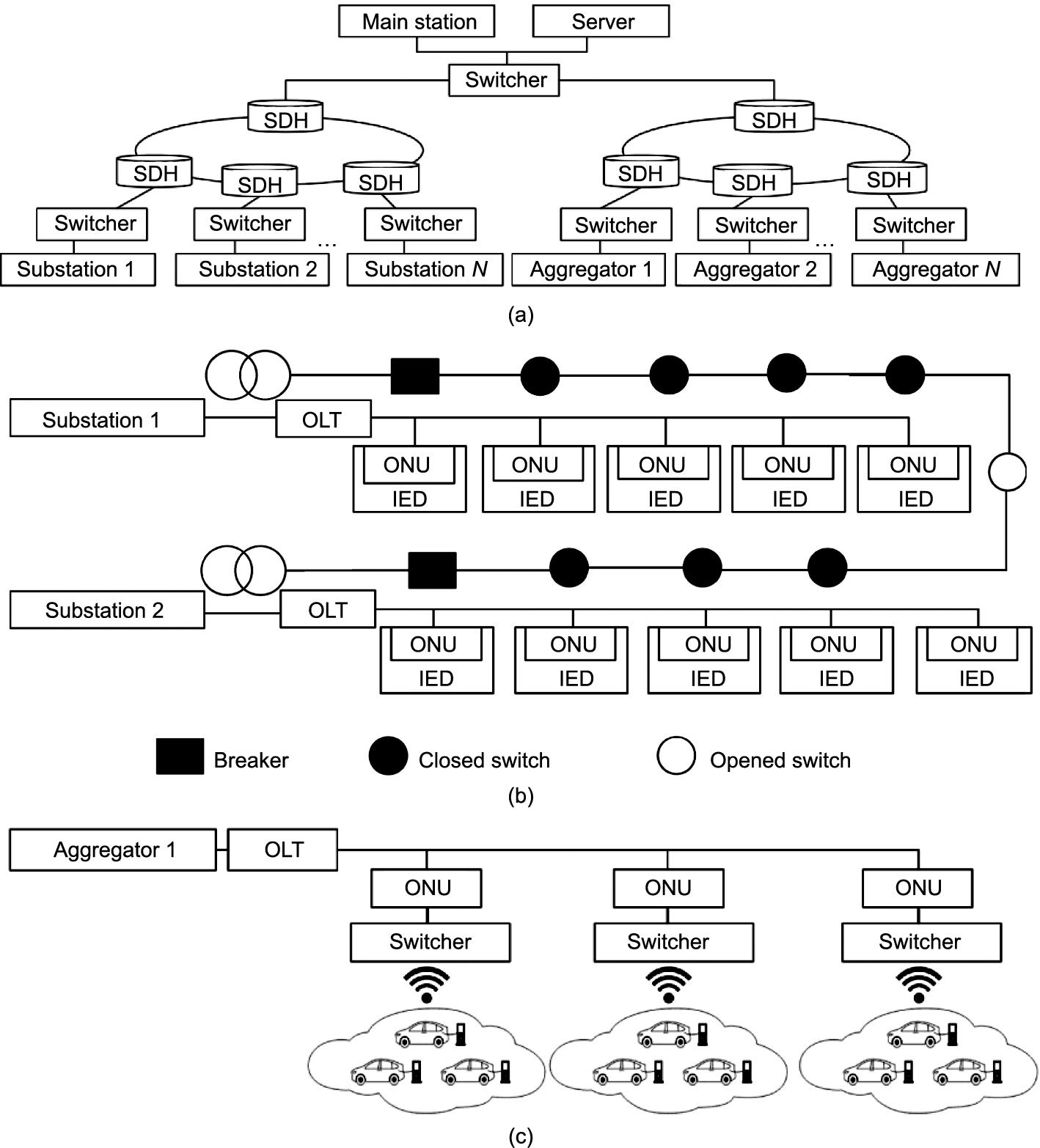
图2 配电网信息系统。(a)主站与子站/聚合商间的骨干层;(b)子站和IED间的接入层;(c)电动汽车聚合商和电动汽车间的接入层。
《2.2 交通信息系统》
2.2 交通信息系统
交通信息系统由交通控制中心、交通子站、交通信息采集装置等组成。在如图3所示的基本结构中,骨干层采用SDH连接交通控制中心和交通子站,而接入层采用EPON连接交通子站和采集装置。交通控制中心采集交通数据,生成和发布交通诱导信息,并对交通网进行调度。本文选取最广泛使用的环形感应线圈检测器作为交通信息采集装置。
《图3》

图3 交通信息系统的基本结构。(a)骨干层;(b)接入层。
同时,交通控制中心本身是一个基于局域网的由数据库服务器、应用服务器、调度台等设备组成的系统[42]。数据库服务器存储交通数据和交通诱导信息,然后应用服务器提取信息并将信息传输到不同的发布平台。图4为交通诱导信息发布系统的基本结构,其中采用了两个数据库服务器和两个应用服务器来提高可靠性。
《图4》
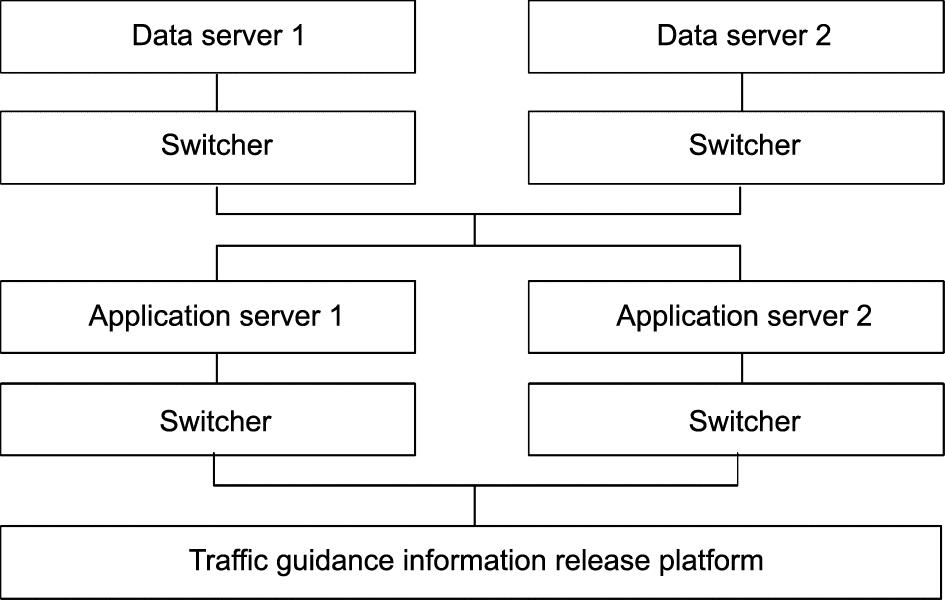
图4 交通诱导信息发布系统的基本结构。
因此,图3和图4中信息系统的可靠性将分别影响交通诱导信息的生成和发布。
《3、 信息系统可靠性模型》
3、 信息系统可靠性模型
《3.1 物理元件可靠性》
3.1 物理元件可靠性
一个双状态马尔可夫模型被用来描述物理元件的故障和修复。运行状态持续时间(故障时间,TTF)和中断状态持续时间(修复时间,TTR)可依据公式(1)和公式(2)进一步计算。
(1)
(2)
式中,
《3.2 信息传输可靠性》
3.2 信息传输可靠性
测量数据和控制信号等信息是通过信息网络传输的。信息网络的连通性和性能决定了信息传输的可靠性。
《3.2.1. 信息网络连通性》
3.2.1. 信息网络连通性
信息网络可以用一个无向连通图来表示,设为= (V, E)。所有设备都被抽象为节点(包括通信线路),用V = {v1, v2, …, v}表示;节点间的连接关系被抽象为边,用E = {e1, e2, …, e}表示。邻接矩阵() = a()定义如下:
(3)
式中,代表信息网络的无向连通图;V是节点v的集合;E是边e的集合;x、y是对应节点的编号。
可达性矩阵= p()用于描述节点v和v间的连通关系p,其定义如下:
(4)
k步可达性矩阵计算如下:
(5)
然后将中的非零元素设置为1,即得到可达性矩阵,从而可确定网络的连通性。
《3.2.2. 信息网络性能》
3.2.2. 信息网络性能
信息网络的性能可以从时延、丢包、误码等方面进行评估。端对端信息传输完成后,接收端将返回一个响应包,以确保信息被可靠地传输。通过数据重传可以有效避免丢包和误码的影响。因此,本文只考虑信息传输过程中的时延约束,并采用正态分布对其不确定性进行建模[43]。若时延超过给定阈值,则代表信息传输失败。
《4、 考虑交通诱导信息可靠性的电动汽车入网状态》
4、 考虑交通诱导信息可靠性的电动汽车入网状态
《4.1 考虑交通诱导信息可靠性的路线选择》
4.1 考虑交通诱导信息可靠性的路线选择
出行时间是影响用户路线选择的最重要因素,本文假设用户根据公式(6)~(8)选择出行时间最短的路线。
(6)
(7)
(8)
式中,r和s分别为道路两端的节点;c(t)代表通过道路(r, s)所需时间的时间阻抗;V(t)是由环形感应线圈检测器收集的交通流量;l和v(t)是道路(r, s)的长度和车速;v0和C分别为道路(r, s)的设计车速和容量;α1、α2和α3是给定的模型参数。
考虑图3所示信息系统的可靠性,信息元件和传输故障可能导致检测器数据丢失,采用相邻时段数据的平均值填补丢失数据[44]。V(t)和c(t)将被更新如下:
(9)
(10)
考虑图4所示信息系统的可靠性,当交通诱导信息发布失败时,电动汽车用户将根据如下所示的感知阻抗c
(11)
式中,Δc(t)是时间阻抗的感知误差,服从均值为0的Gumbel分布。
综上所述,考虑交通诱导信息可靠性,用户将根据公式(12)和公式(13)进行路线选择。
(12)
(13)
《4.2 电动汽车入网状态》
4.2 电动汽车入网状态
出行链被用来模拟电动汽车用户的日常出行。如图5所示,用户i的出行链由空间链和时间链组成。
《图5》
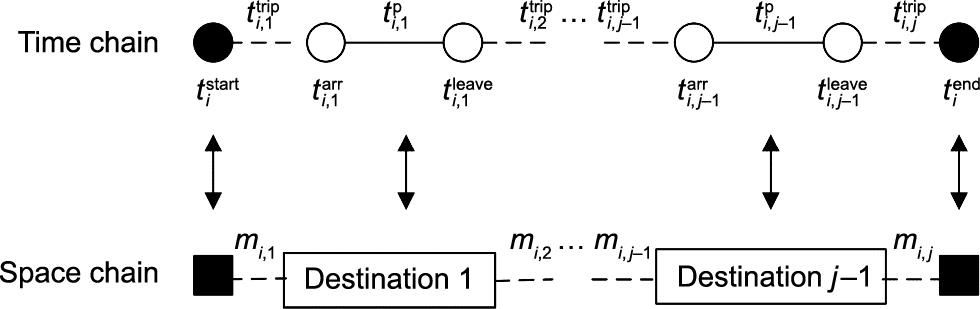
图5 出行链。
(1)空间链:节点代表用户的出行目的地,两节点间的连线代表用户的驾驶路径,m,代表第j次出行里程。
(2)时间链:节点代表时间点,t
下面将进一步介绍出行链中变量的计算方法。
《4.2.1. 空间链》
4.2.1. 空间链
(1)电动汽车每日出行计划。采用基于活动抽样的出行计划模型[45]生成空间链。其中,以居住区作为用户日常出行的起点和终点,而目的地包括工作区、商场、医院、居住区(即中途回家)和景区。根据活动变量的统计概率对电动汽车的每日出行计划进行抽样。如果目的地包括工作区,那么应该将该工作区目的地放在第一位。而如果目的地包括居住区(即中途回家),那么应该将该居住区目的地放在除开始和结束目的地外的随机位置。其他目的地则随机安排。
(2)考虑交通诱导信息可靠性的里程。正如第4.1节所述,用户根据公式(12)和公式(13)选择路线,然后m,和消耗电量
(14)
(15)
式中,S是所选路线的所有道路的集合;w(t)是依据参考文献[46]提出的方法计算的电动汽车1 km耗电量;B是电动汽车的电池容量。
《4.2.2. 时间链》
4.2.2. 时间链
(1)日行程起始时间。
(16)
式中,
(2)目的地间行驶时间。
(17)
(3)目的地的离开时间。如果出行从工作区开始,那么
(18)
式中,
如果出行从其他地区开始,那么
(19)
(20)
式中,
《4.2.3. 快充分析》
4.2.3. 快充分析
当SOC满足以下条件时,用户将改变其路线并选择最近的电动汽车充电站进行快速充电:
(21)
电动汽车充电站现有的快充充电机一般都是以一定大功率将SOC充到80%左右后,采用小功率对电池进行慢充。因此,本文认为用户在快速充电站将电动汽车SOC充至80%后即离开。快充时间可计算如下:
(22)
式中,ΔSOCstation是从当前目的地到充电站的耗电量,而Pchf是额定快充功率。
《4.3 电动汽车入网状态计算流程》
4.3 电动汽车入网状态计算流程
图6概述了计算电动汽车入网状态的流程。
《图6》
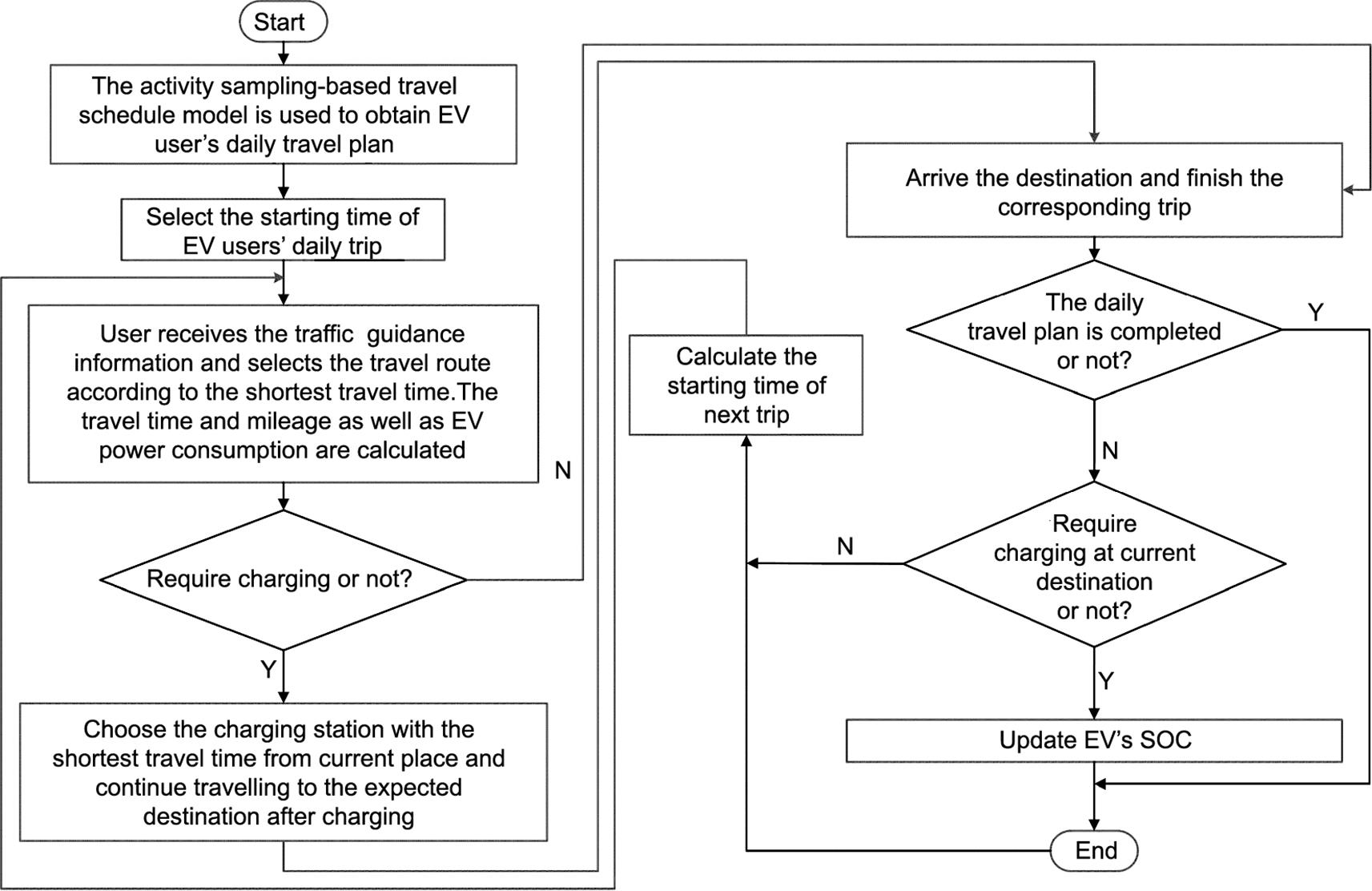
图6 电动汽车入网状态计算流程。
《5、 考虑用户需求的电动汽车响应能力评估》
5、 考虑用户需求的电动汽车响应能力评估
《5.1 电动汽车充电策略》
5.1 电动汽车充电策略
电动汽车大部分时间停在居住区和工作区,在其他区域停留的时间相对较短。在配电主站-聚合商的分层控制结构中,当电动汽车i在居住区或工作区接入电网时,聚合商将进行以下充电优化以使系统总负荷变化最小。
(23)
s.t.
(24)
(25)
(26)
(27)
式中,Pch,(t)是第i辆电动汽车在t时刻的充电功率;P‒1(t)为t时刻配网系统的总负荷,由非电动汽车负荷功率和前i-1辆电动汽车的充电功率组成;
公式(23)~(27)中的变量可计算如下:
(28)
(29)
(30)
(31)
(32)
式中,
《5.2 基于充电需求松弛度的电动汽车响应能力》
5.2 基于充电需求松弛度的电动汽车响应能力
所提电动汽车充电需求松弛度如下:
(33)
式中,tleave - t 代表t时刻第i辆电动汽车的剩余可充电时间,而(
依据L(t),电动汽车可分类如下:
(1)L(t) < 0:电动汽车从当前时刻持续充电至离网时刻仍不能满足出行电量需求。
(2)
(3)
(4)
为减少电动汽车电池损伤,电动汽车SOC应不低于20%,t时刻可放电的电动汽车应满足公式(34):
(34)
然后,t时刻考虑用户出行需求的电动汽车响应能力
(35)
为表征电动汽车出行时SOC与出行电量需求的关系,定义电动汽车用户满意度为:
(36)
式中,N为全部电动汽车数量,而Ns为出行时SOC能够满足用户出行电量需求的电动汽车数量。
《6、 算例》
6、 算例
本文以图7所示的包含RBTS BUS6 [48](上层)和北京交通网络(下层)的系统作为研究对象。将由北京五环内的高速公路(红线)和主干道(蓝线)构成的交通网络等效为一个25 km × 25 km的连通图,其中路网节点被置于相应的单位长度为1 km的网格节点上。选取电动汽车渗透率为50%,私家车与居民用户的比例为1.86 [47],则区域内共包含2370辆电动汽车。表1提供了对应北京交通网络的RBTS BUS6的负荷点。信息元件的可靠性参数以及RUTS BUS6和北京交通网络的详细信息可以在文献[48‒51]中找到。仿真关注以1 h为间隔的日前优化场景并通过MATLAB平台实现。
《图7》
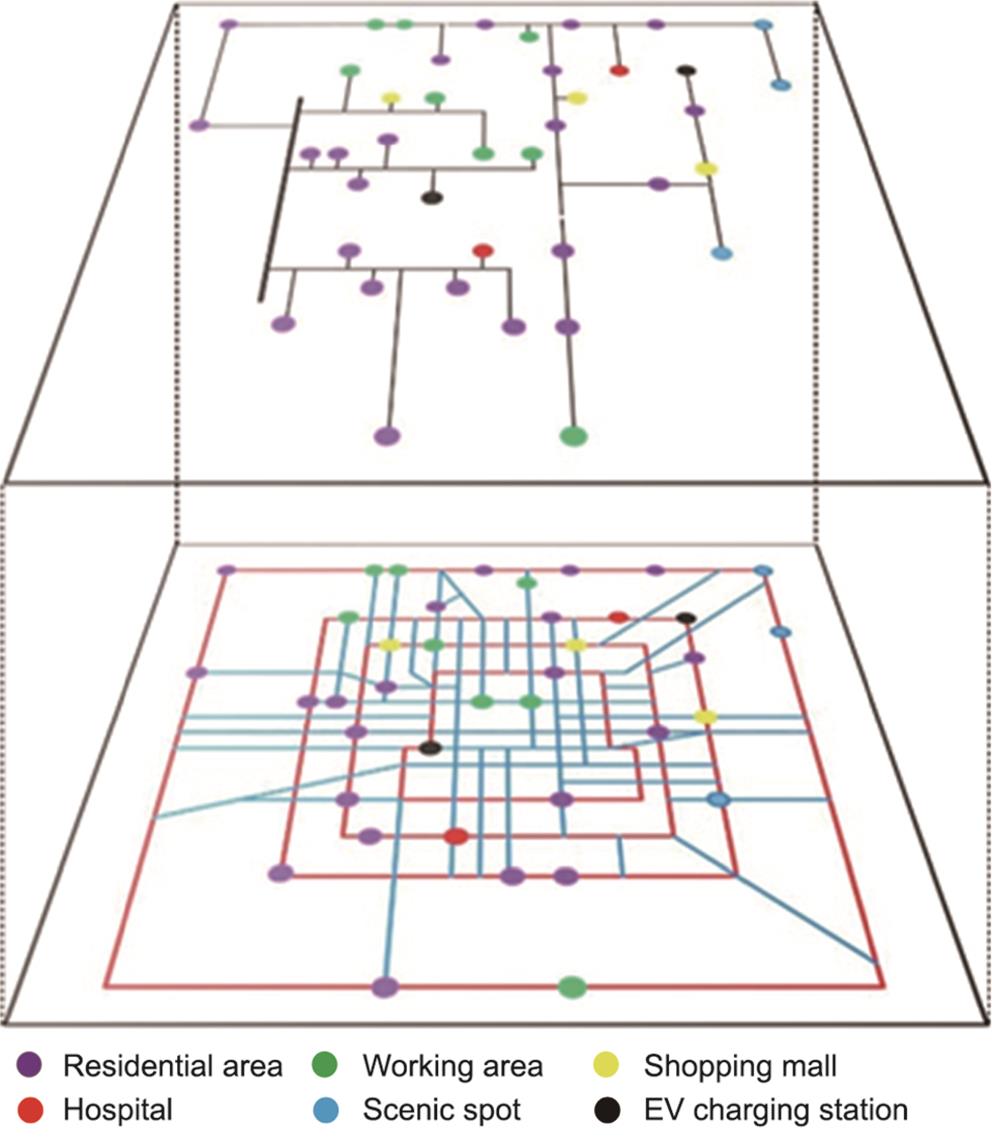
图7 电力-交通耦合网络研究案例。
《表1》
表1 对应北京交通网络的RBTS BUS6负荷点
| Area | Load points |
|---|---|
| Residential area | 1, 2, 3, 4, 7, 8, 9, 10, 11, 13, 18, 19, 22, 23, 25, 27, 28, 29, 31, 33, 36, 39 |
| Working area | 6, 14, 16, 17, 20, 21, 24, 30 |
| Shopping mall | 15, 26, 38 |
| Hospital | 12, 32 |
| Scenic spot | 34, 35, 37 |
| Charging station | 5, 40 |
《6.1 电动汽车响应能力评估》
6.1 电动汽车响应能力评估
算例1(Case 1):当满足公式(34)时,电动汽车就可以放电。
算例2(Case 2):当SOC高于某个阈值时,电动汽车就可以放电,该阈值分别设置为80%、70%、60%和50% [16]。
算例3(Case 3):只有当放电后的SOC高于用户出行电量需求时,电动汽车才能放电[20]。
如图8所示,居住区电动汽车在不同放电判据标准下的响应能力明显不同。因为大部分返家电动汽车的SOC不能满足用户随后的出行需求,算例3的响应能力明显低于其他判据标准下的响应能力。上午11:00至次日凌晨2:00,算例1的响应能力高于算例2。而2:00以后,因为在算例1中用户的需求应始终被满足,而接近电动汽车出行时间时放电会导致电动汽车出行时电量不能满足用户需求,算例1的响应能力开始下降并低于算例2。
《图8》
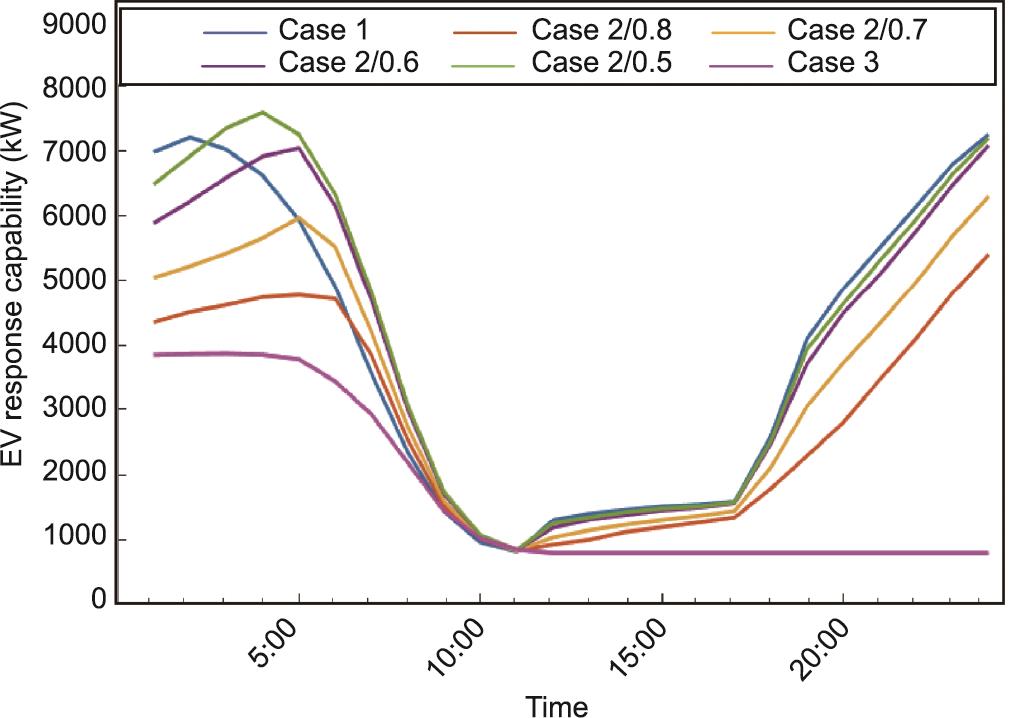
图8 居住区电动汽车的响应能力。
图9描述了居住区电动汽车用户的满意度。在算例1和算例3中,用户满意度始终为1。在算例2中,用户满意度从中午12:00到晚上24:00保持接近1,但从凌晨1:00到上午11:00明显下降。此外,SOC阈值越低,满意度越低。
《图9》

图9 居住区电动汽车的用户满意度。
如图10和图11所示,工作区电动汽车在不同放电判据标准下的响应能力和用户满意度与居住区相似。值得注意的是,如图12所示,由于工作区内SOC为50%~60%的电动汽车数量几乎为0,算例2的响应能力在50%和60%的阈值下几乎一样。
《图10》

图10 工作区电动汽车的响应能力。
《图11》
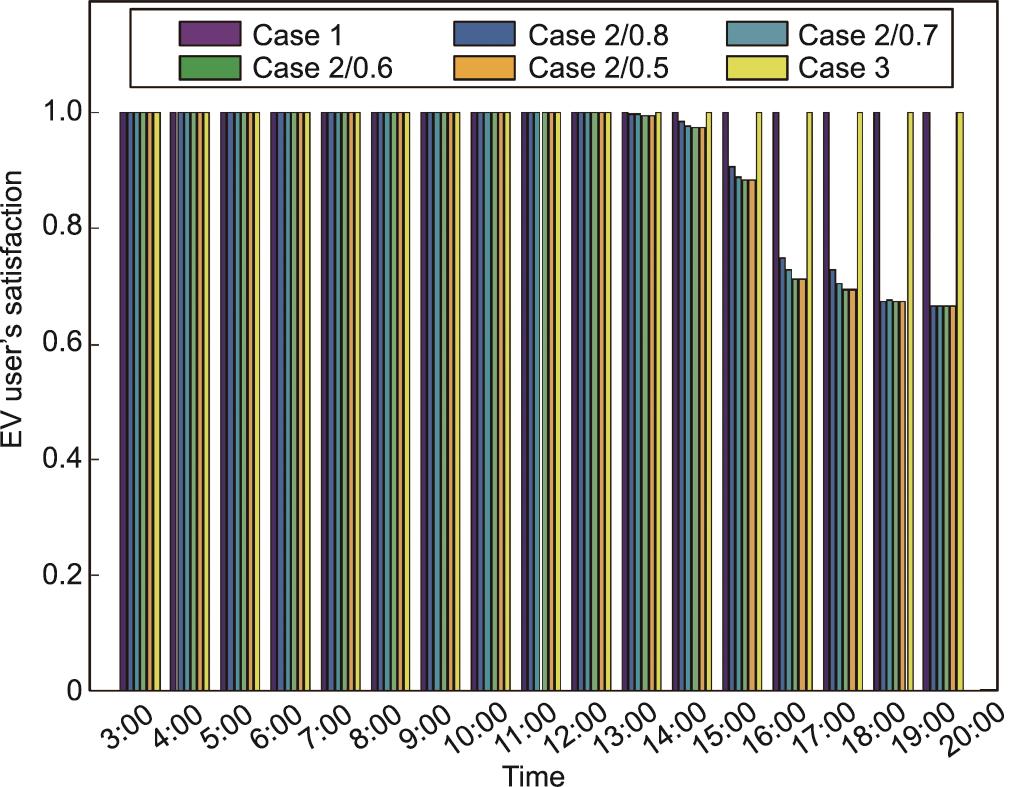
图11 工作区电动汽车的用户满意度。
《图12》

图12 工作区电动汽车SOC的分布。
可以看出,基于所提方法获得的电动汽车响应能力可以最大程度地满足用户的出行需求。
《6.2 交通诱导信息对电动汽车出行的影响》
6.2 交通诱导信息对电动汽车出行的影响
表2提供了考虑交通诱导信息生成和发布可靠性的电动汽车出行结果。当交通诱导信息完全可靠时,电动汽车用户可以准确识别交通网络状态并选择耗时最短的路线,但其里程和电量消耗可能会增加。相反,不可靠的交通诱导信息生成或发布将导致日均出行时间的显著增加及到达工作区和返回居住区时间的延迟。图13和图14提供了电动汽车到达工作区和返回居住区时间的概率分布。可以发现,不可靠的交通诱导信息生成和发布对应的时间概率分布比较接近,均明显落后于交通诱导信息完全可靠的概率分布。在交通诱导信息发布不可靠情况下,用户依据在交通网络中的感知阻抗选择路线,从而可能选择里程最短而非时间最短的路线,使得用户的出行时间变长,而与行驶里程相关的日均里程、日均耗电量、快速充电比例、平均快充电量等参数则变小。
《表2》
表2 交通诱导信息对电动汽车出行的影响
| EV trip data | Completely reliable | Unreliable generation | Unreliable release |
|---|---|---|---|
| Average daily travel time (h) | 1.7101 | 2.8367 | 2.6082 |
| Average daily mileage (km) | 46.4090 | 46.1728 | 42.4838 |
| Average time of arriving at the working area | 8.3527 | 8.6306 | 8.6051 |
| Average time of returning to the residential area | 19.1347 | 19.9713 | 19.7362 |
| Average daily power consumption | 0.5158 | 0.5174 | 0.4817 |
| Proportion of fast charging | 10.9243% | 11.2978% | 7.1428% |
| Average fast charging energy | 0.0713 | 0.0723 | 0.0463 |
《图13》
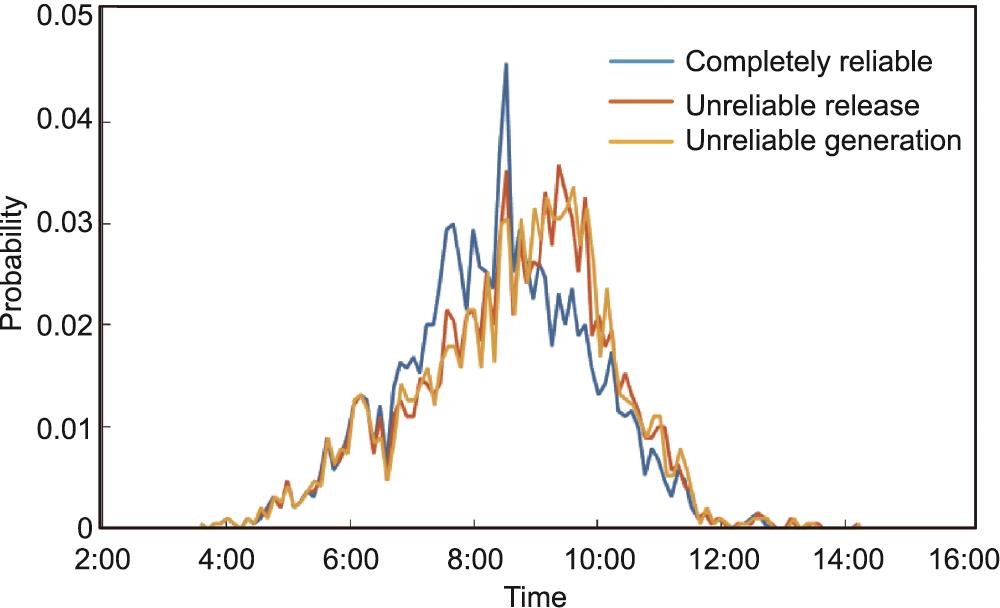
图13 电动汽车到达工作区时间的概率分布。
《图14》
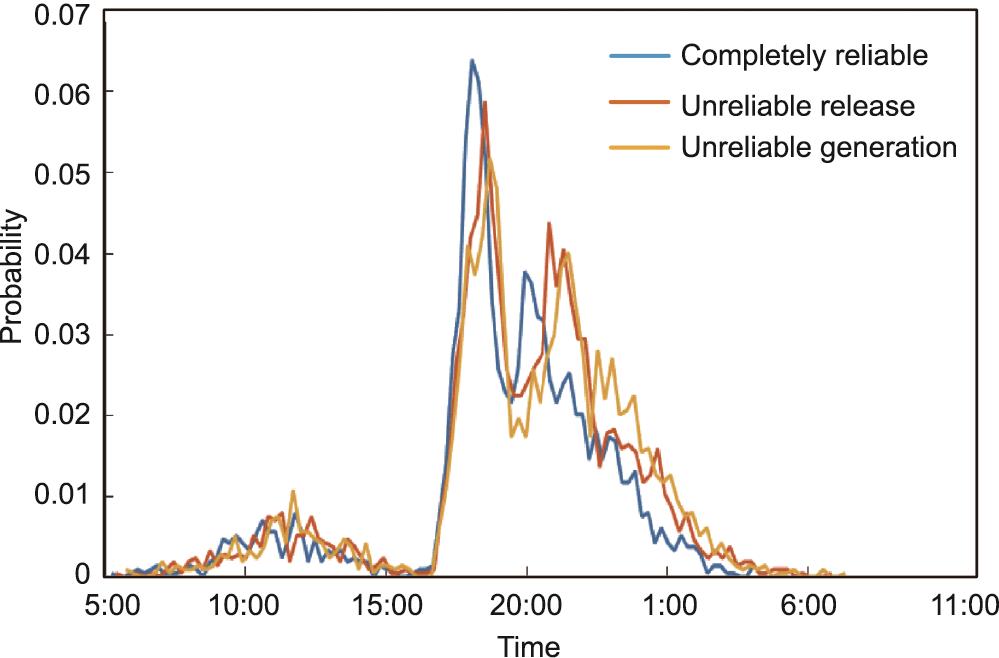
图14 电动汽车返回居住区时间的概率分布。
《6.3 信息系统可靠性对电动汽车响应能力的影响》
6.3 信息系统可靠性对电动汽车响应能力的影响
算例1(Case 1):信息系统完全可靠。
算例2(Case 2):假设电网信息系统完全可靠,考虑交通信息系统可靠性影响。
算例3(Case 3):假设交通信息系统完全可靠,考虑电网信息系统可靠性影响。
算例4(Case 4):综合考虑交通信息系统和电网信息系统可靠性。
图15显示了不同情况下工作区和居住区电动汽车的响应能力。显然,信息系统可靠性对电动汽车的响应能力有很大影响,算例2~4中的响应能力均比算例1低。交通信息系统可靠性对电动汽车响应能力的影响主要集中在电动汽车入网时段,而电网信息系统可靠性则始终影响电动汽车响应能力且影响程度更大。这是因为在电动汽车充电/放电控制过程中需要进行多次实时通信和连接,提高了信息传输不可靠的概率,导致部分电动汽车处于不可控状态,从而使系统响应能力明显下降。
《图15》
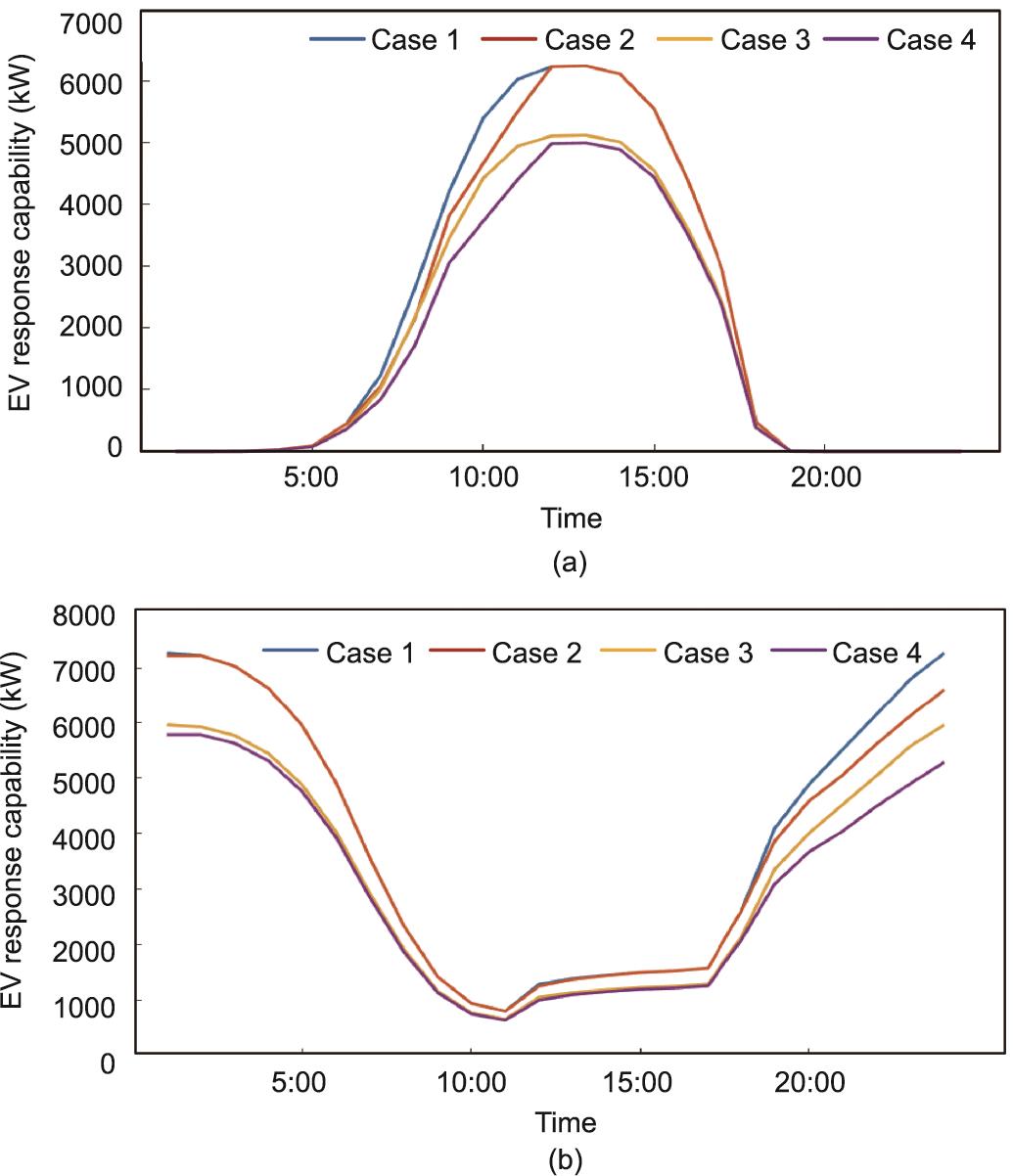
图15 不同情况下工作区和居住区电动汽车响应能力。(a)工作区电动汽车响应能力;(b)居住区电动汽车响应能力。
《7、 结论》
7、 结论
本文提出了一种考虑用户出行需求及集成于电网和交通网的信息系统可靠性的电动汽车响应能力评估方法。基于改进的包含北京交通网络和RBTS BUS6的测试系统的结果表明,本文提出的基于电动汽车充电需求松弛度的方法可在始终满足用户出行需求的同时最大化电动汽车的响应能力。不可靠的交通诱导信息生成或发布将影响电动汽车出行并最终延迟电动汽车的入网时间。信息系统可靠性对电动汽车响应能力影响很大,其中相比交通信息系统,电网信息系统的影响更大。
相比其他方法,本文所提出的方法不仅更准确有效地评估了电动汽车的响应能力,还可为信息-电力-交通系统的联合规划和优化运行提供支撑。此外,本文仅从交通诱导信息方面考虑了交通信息系统的影响。而在未来工作中应进一步考虑交通信息系统在交通系统调度中的作用。并且,动态热定值(DTR)系统在升级电网方面拥有强大的潜力。鉴于DTR中有许多传感器和聚集器,其间的广泛通信也是不容忽视的。因此,为了处理插电式电动汽车可能造成的线路过载问题,在未来工作中还将考虑DTR信息系统的可靠性。同时,鉴于网络攻击风险越来越大,可能导致传输中断、传输延迟、信息篡改及其他信息系统故障,网络攻击对CPDN中电动汽车响应能力的影响也不容忽视。本文已经对前两种影响进行了讨论,在下一步工作中也将对信息篡改进行研究。











 京公网安备 11010502051620号
京公网安备 11010502051620号




