

《1、 引言》
1、 引言
可展开结构作为机构和结构的综合,是工程研究的前沿领域,同时也是航天航空领域工程问题的最佳解决方案之一。可展开结构是由杆、索和膜所组成的基本单元的延伸,具有配置简单和刚度优良的过约束系统。此外,可展开结构对尺寸和形状误差非常敏感[1‒5]。空间可展开结构具有以下特点:①结构单元和组合规则的多样化,使可展开结构的几何设计更加灵活;②刚度可通过内部索或膜的预张力进行改变;③拥有良好的可扩展性,有利于缩小原型研发、建模仿真和验证的规模,或扩大规模以满足潜在的任务需求;④可根据仿生学原理设计新型的可展开结构。
空间可展开结构技术是解决大尺寸航天器结构与火箭发射包络限制之间矛盾的主要手段。航天器结构最初以较小体积的折叠状态安装在载体上,在轨时通过地面的指令控制展开到工作状态。自20世纪90年代以来,在载人航天、探月工程、火星探测、大型太空望远镜、高分辨率对地观测等国家重大工程需求牵引下,我国的可展开空间结构技术取得了长足的进步。目前,我国可展开空间结构已成功应用或正在应用于卫星系统太阳能电池、大口径星载天线[6‒13]、空间站伸展臂[14‒19]、卫星通讯系统太阳翼[20‒24]、刚性与柔性太阳翼[25‒32]、火星及月球探测车[33‒39]等多个航天工程。目前我国在轨空间可展开结构的最大位形尺寸达到20~30 m,位形精度达到亚毫米级。哈尔滨工业大学冷劲松团队[40]在基于形状记忆聚合物复合材料(shape-memory polymer composites, SMPC)的释放机构研制方面取得了众多成果。在2020年,团队设计了弯曲构型的结构锁定机构并成功应用在CubeSat太阳翼的展开。另外,冷劲松团队[41]实现了针对改进展开同步性的进一步优化。因此,大型化、轻量化、高精度空间可展开结构已成为我国航天科技领域研究的热点问题。本文主要梳理我国空间可展开结构的典型空间应用及研究进展,探讨未来空间可展开结构的发展趋势。
随着可展开机构的发展,出现了许多用于研究其构型、运动学和动力学的设计理论。例如图论[42],一种广泛应用于可展开机构配置设计的拓扑方法,极大地丰富了机构的相关研究。对于具有多个回路和过约束的可展开机构,螺旋理论可以使用Denavit-Hartenberg(D-H)方法[43]进行机构的运动学分析。此外,基于螺旋理论,可以通过匹配运动链生成新的配置[44],并分析其运动奇异性[45]。近年来,折纸[46]用于从一个全新的角度来描述杆件机构的设计,进一步丰富了可展开机构的设计方法。
《2、 中国空间可展开结构研究进展及应用》
2、 中国空间可展开结构研究进展及应用
我国空间可展开结构经过多年的研究和发展,实现了在轨展开从一维伸展臂展开、二维平板阵列展开到三维结构展开的跨越式发展,包含空间大型网状天线、空间机械臂、空间太阳翼和深空探测领域可展开结构与机构等应用(表1)。
《表1》
表1 可展开结构类型
| Product | Types | Platform | Application |
|---|---|---|---|
| Large space mesh antennas | Framed deployable antenna | BD-3 | Global coverage positioning and navigation |
| Umbrella deployable antenna | CE-4 | Relay communication | |
| SAR antenna | HJ-1C | Environment and disaster monitoring | |
| Space solar arrays | Rigid solar array | DFH-4 | Energy supply |
| Semi-rigid solar array | DFH-5 | Energy supply | |
| Flexible solar array | China Space Station | Energy supply | |
| Deep-space exploration | Lunar rover | CE-3, CE-4 | Detection, collection, and analysis of samples on the lunar surface |
《2.1 空间大型网状天线》
2.1 空间大型网状天线
空间可展开网状天线具有大口径、收纳比高、轻量化等优点,能够满足整个卫星质量和火箭整流罩尺寸的限制。大口径可以提供高增益,而高收纳比、轻质量和可展开性可以克服发射阶段质量和尺寸包络的限制。我国在空间大型网状天线方面的研究起步较晚,经过多年的努力成功研制了多款空间大型网状天线,并应用于北斗导航、月球探测、中继通信等领域。典型应用包括北斗(BD)三号卫星的构架式可展开天线、嫦娥(CE)四号卫星的伞状可展开天线和环境(HJ)-1C卫星的合成孔径雷达(SAR)天线。
北斗三号是我国自主建设的具有全球覆盖能力的卫星定位导航系统[47]。北斗三号地球同步轨道(GEO)卫星配置了两副构架式可展开天线(以下简称构架天线),如图1所示。构架天线主要由构架天线反射器、多级展开装置、反射器安装支座、扫描机构、馈源组件组成。构架天线反射器采用四面体构架单元的结构形式,每个单元由三根腹杆、三根折叠杆、花盘及扭簧驱动部件组成,依靠自身弹簧部件驱动展开,天线反射器展开口径达5 m,收拢与展开尺寸之比可达1∶10左右。北斗三号构架天线结构复杂、在轨展开步骤多、展开冲击大,亟需突破天线反射器展开、高精度扫描控制等关键技术。这些关键技术首次实现了偏馈构架式可展开天线的在轨应用,为北斗卫星步入国际一流导航系统和中国北斗自主创新之路提供有力支撑。
《图1》
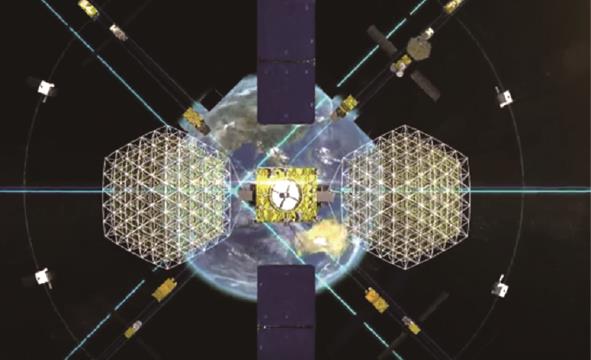
图1 北斗三号GEO卫星构架式可展开天线。
嫦娥四号中继星运行在绕地月L2点的halo轨道上,与着陆于月球背面的嫦娥四号着陆器和巡视器的最远通信距离达到79 000 km [48],如图2所示。同时受着陆器和巡视器的发射功率和天线口径的限制,导致中继星接收到的信号电平弱。为了能够保证中继通信链路的成功建立和性能,对中继通信天线的口径和增益提出了较高的要求。嫦娥四号中继星中继通信天线采用了固网结合伞状抛物面天线方案,如图3所示。天线口径为4.2 m,增益达到45 dB,有效地满足了远距离通信对天线性能的要求,解决了整星质量和发射尺寸包络限制带来的技术难题。
《图2》

图2 嫦娥四号中继星任务示意图。
《图3》
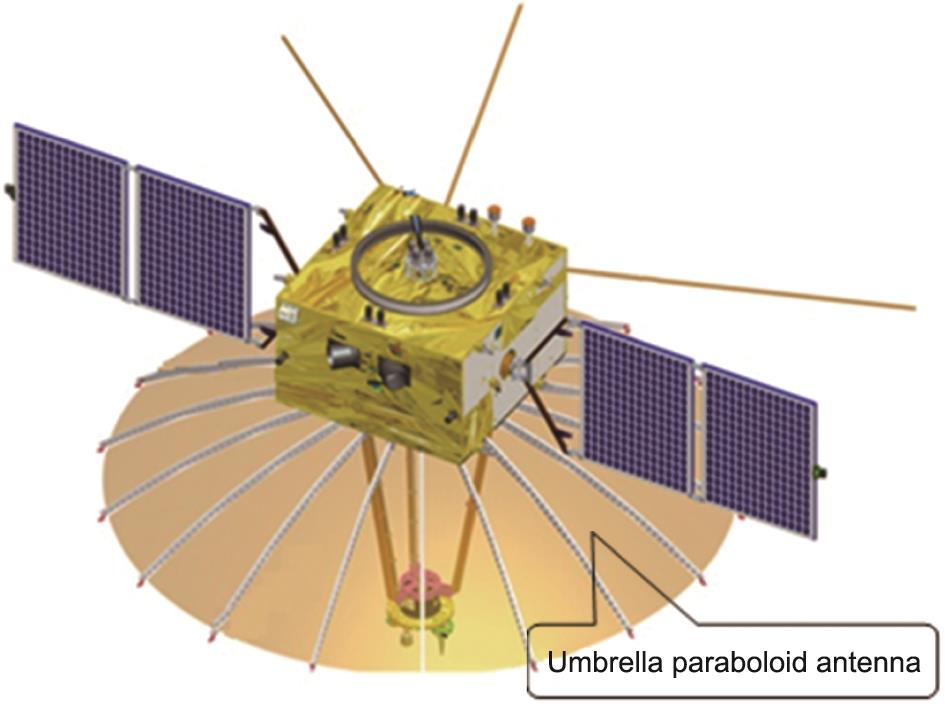
图3 伞状抛物面天线星上状态图示。
环境-1C卫星是中国用于环境和灾害监测的雷达卫星,能够进行全天候的观测。为了解决全天时的观测问题,环境-1C卫星的SAR天线采用了可展开抛物面构架天线和多波束馈源的技术解决方案[49]。与微带平面阵列和波导缝隙阵列天线相比,可展开构架天线具有折叠尺寸小、轻量化、易于实现多波束阵列和多极化等优点。所应用的构架式可展开天线主要包括反射器、馈源和展开组件。展开部件包括可展开臂、旋转机构、可展开馈电机构、第四支撑结构和减压装置。整个天线在轨展开顺序如下:第四支撑杆、馈电机构、天线展开臂和构架天线反射器(图4)。构架天线反射器由许多四面体结构的单元组成,每个单元包括三个腹杆、三个折叠杆和扭转弹簧驱动部件。构架天线的展开依赖于其弹簧驱动部件,其工作原理如图5所示。
《图4》

图4 SAR天线在轨展开过程。
《图5》
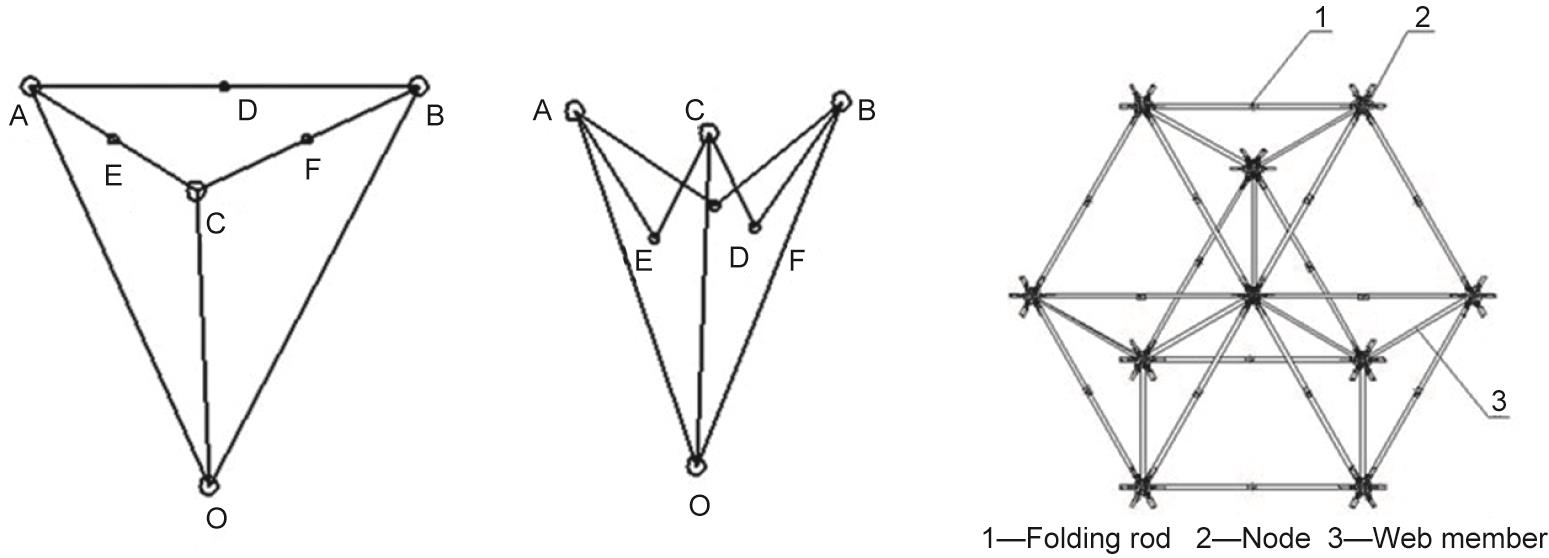
图5 SAR天线结构单元,A~0表示机构单元运动结点编号。
《2.2 空间太阳翼》
2.2 空间太阳翼
从20世纪80年代开始,我国开始研发可展开式太阳翼,截至目前,在轨成功飞行的太阳翼数量已经超过500个,目前,我国可展开式太阳翼根据产品形式主要分为:刚性太阳翼、半刚性太阳翼、柔性太阳翼。目前,发射的航天器以一维刚性太阳翼为主。中国东方红(DFH)四号平台太阳翼为大型一维二次展开刚性太阳翼。该太阳翼由连接架、基板(4块)和一套机构(包括一次和二次压紧释放机构、一次和二次展开锁定机构)组成,如图6所示。二次展开太阳翼与以往的一次展开太阳翼相比,需要通过特殊的展开机构实现最外侧板的二次展开的动作功能,尤其是外板的展开、锁定、解锁、再展开、再锁定的功能。并且,机构需要适应二次展开时的极低温度。为此,平台研发了特殊的二次展开技术:在卫星到达转移轨道后,一次压紧装置解锁,外板展开90°锁定;当卫星进入准同步轨道后,二次压紧装置解锁、连接架和其他各太阳能电池板展开到90°时,外板90°锁定的铰链自动解锁,并与连接架和其他各板同步展开和锁定,如图7所示。国内外刚性太阳翼性能对比如表2所示。
《图6》

图6 东方红四号增强型平台太阳翼展开状态构型。(a)东方红四号平台配置;(b)刚性太阳翼原理。
《图7》

图7 二次展开太阳翼在轨展开过程。
《表2》
表2 国内外刚性太阳翼性能对比
| Solar array | Deployment method | Substrate type | Configuration | Number of plates per array | Solar panel size (m × m) | Output power (kW) | Squeeze points in folded state | Type of battery |
|---|---|---|---|---|---|---|---|---|
| DFH-4 platform solar array | Secondary expansion | CFRP panel/aluminum honeycomb core sandwich structure panel | 1D, four solar panels | 4 | 3.30 × 2.36 | 13.5 | 8 | Triple-junction gallium arsenide (28%) |
| PaceBus4000 satellite platform solar array | Secondary expansion | CFRP panel/aluminum honeycomb core sandwich structure panel | 1D, four solar panels and two side solar panels | 6 | 3.66 × 2.22 | 10.5 | 8 | Monocrystalline silicon (12%) |
根据资源遥感卫星光学观测需求,此类卫星对太阳翼提出了较高的太阳翼展开频率指标要求(0.25~5.00 Hz)。针对此类卫星,太阳翼往往具有构型紧凑、翼面紧贴星体、绕星体纵轴的转动惯量小、便于卫星机动的特点。太阳翼平行于展开轴布置。
撑杆式太阳翼是一种根部可锁定的高刚度、轻量化太阳翼。太阳能电池板通过根部铰链与卫星侧壁结构直接相连[50]。为了满足敏捷卫星在轨快速姿态机动的需求,实现太阳翼的高刚度设计,撑杆式太阳翼采用带辅助支撑的构型设计,如图8所示。
《图8》

图8 撑杆式太阳翼展开状态构型。(a)带有辅助支架的太阳能电池板;(b)太阳翼平台。
目前,通信大平台对功率的需求在不断增大,由于发射包络限制,单块太阳能电池板的面积不能无限制增大。在太阳能电池板的光电转换效率无法大幅提升的情况下,若要增加太阳能电池阵的输出功率,只能增加太阳能电池板的数量;如果仍采用一维展开方案,太阳翼展开后呈“长条形”,刚度较低,对卫星飞行姿态控制影响较大。因此,当单翼太阳能电池板的数量达到6~8个时,通常就会采用“二维二次展开”方式。二维是指连接太阳能电池板的铰链轴线在展开后虽然处于同一平面内,但相互之间并非全部平行,如图9所示。“多次”是指太阳翼展开过程有多个阶段,中间有一个稳定的停留状态。这一措施主要用于应对高轨卫星在转移轨道飞行期间的小功率供电需求与较大变轨载荷需求。例如,我国新一代通信大平台——东方红五号平台就采用二维多次展开半刚性太阳翼,由连接架和6块太阳能电池板组成,如图10所示。
《图9》

图9 二维多次展开半刚性太阳翼。
《图10》
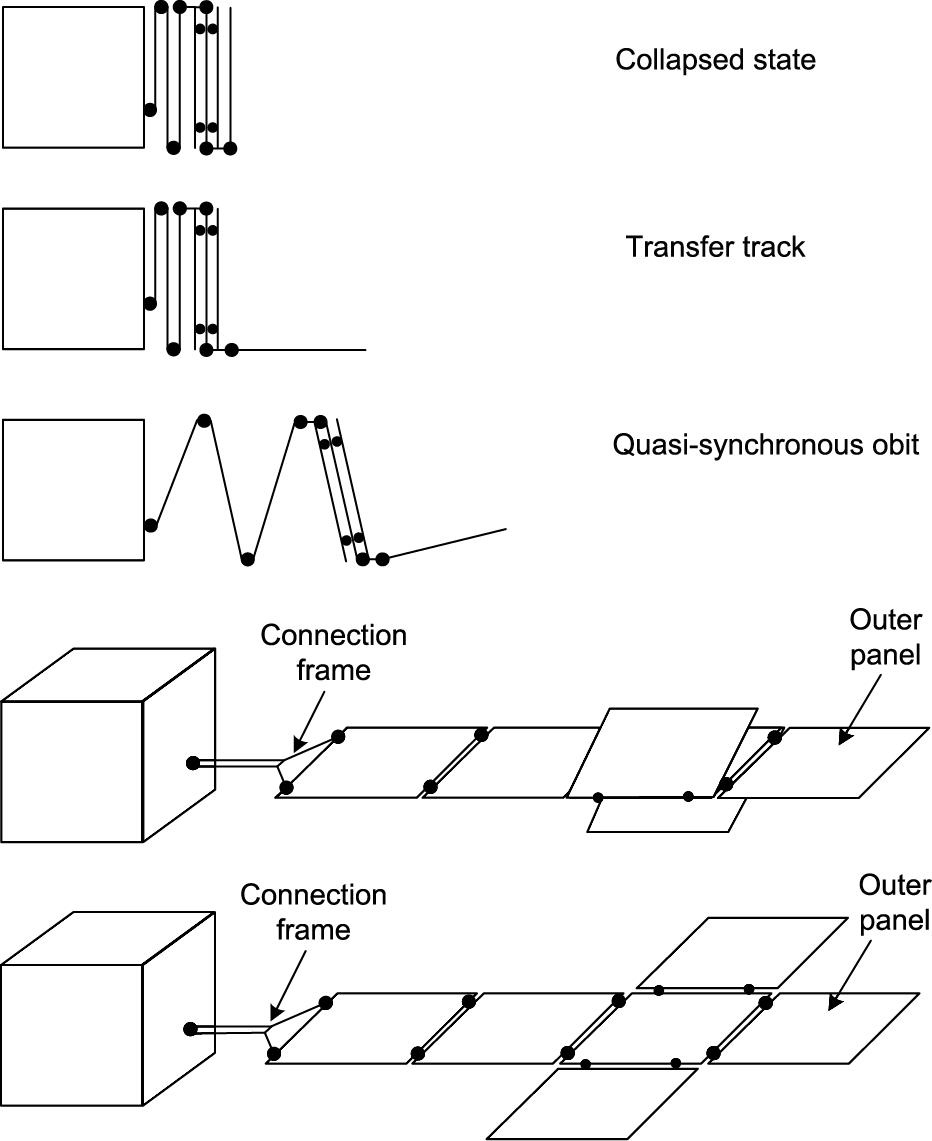
图10 东方红五号平台二维多次展开半刚性太阳翼。
近几年来,随着航天器平台功能的增强,能源需求快速增加,已经从低于几千瓦提高到几十千瓦以上,未来还会达到兆瓦级的应用需求。大面积可展开柔性太阳翼是解决我国大型航天器能源需求的重要产品和主要应用发展方向之一。2021年4月29日,我国首套柔性太阳翼空间站核心舱发射并成功展开,如图11和图12所示。单翼发电功率达9 kW、展开面积为67 m2、展开长度为12.6 m,采用6套有源机构、12套无源机构。与传统的刚性和半刚性太阳翼相比,柔性太阳翼收拢厚度约为16.8 mm,仅为刚性太阳翼的1/60。柔性基板采用超薄型轻质复合材料,单板厚度约为0.3 mm。
《图11》

图11 空间站柔性太阳翼。(a)折叠状态;(b)展开状态。
《图12》
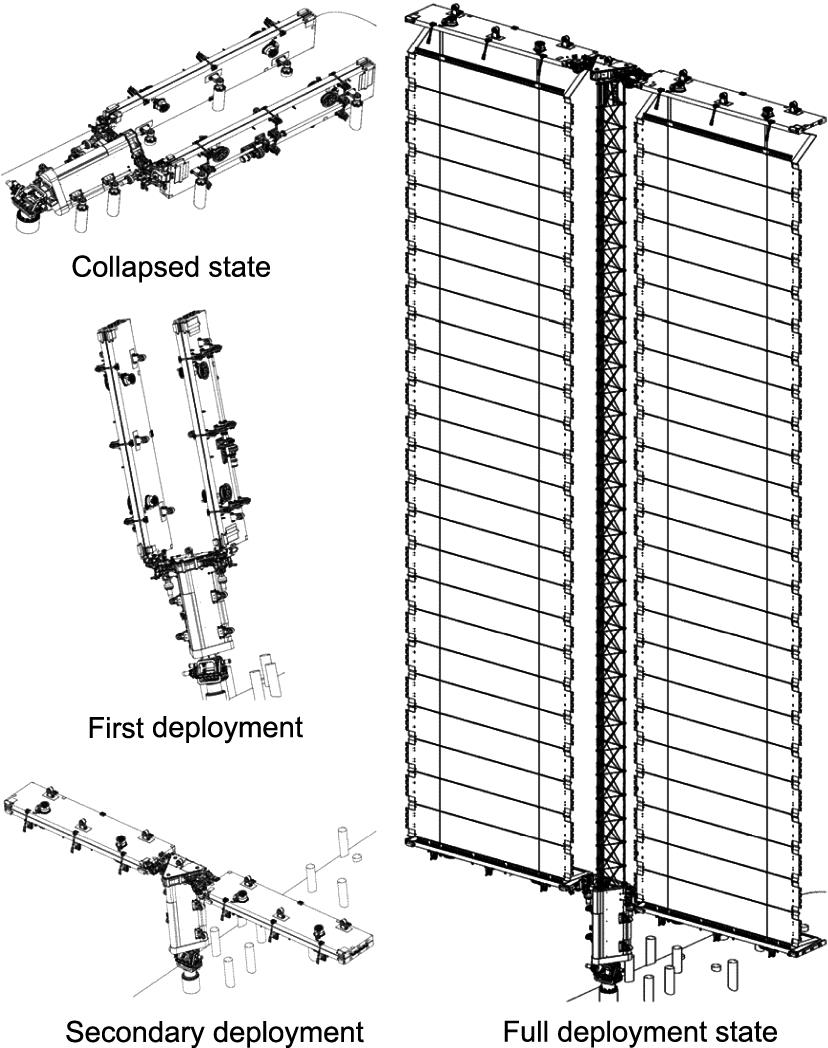
图12 柔性太阳翼在轨展开过程。
中国正在研发的柔性太阳翼是一种展开后形状呈近似圆形的太阳翼,太阳能电池被粘贴在多块柔性三角形薄膜上[51‒52],如图13所示。圆形太阳翼由箱板、太阳毯、压紧释放装置、中心展开机构等组成,太阳毯由柔性三角形薄膜及粘贴在薄膜上面的太阳能电池组成。
《图13》

图13 圆形太阳翼。
2006年,在碳纤维加固的SMPC的基础上,开发了一个阳光刺激的太阳翼基底原型。该原型被命名为Mission SMS-I,完成了在地球静止轨道的展开测试[53]。与传统的太阳翼相比,Mission SMS-I集成了传统的基底、支撑结构和展开功能。此外,Mission SMS-I的设计简单,没有复杂的机械部件。因此,Mission SMS-I是中国首创的SMPC轨道试验,也是世界上第一个SMPC地球静止轨道试验,如图14所示。
《图14》
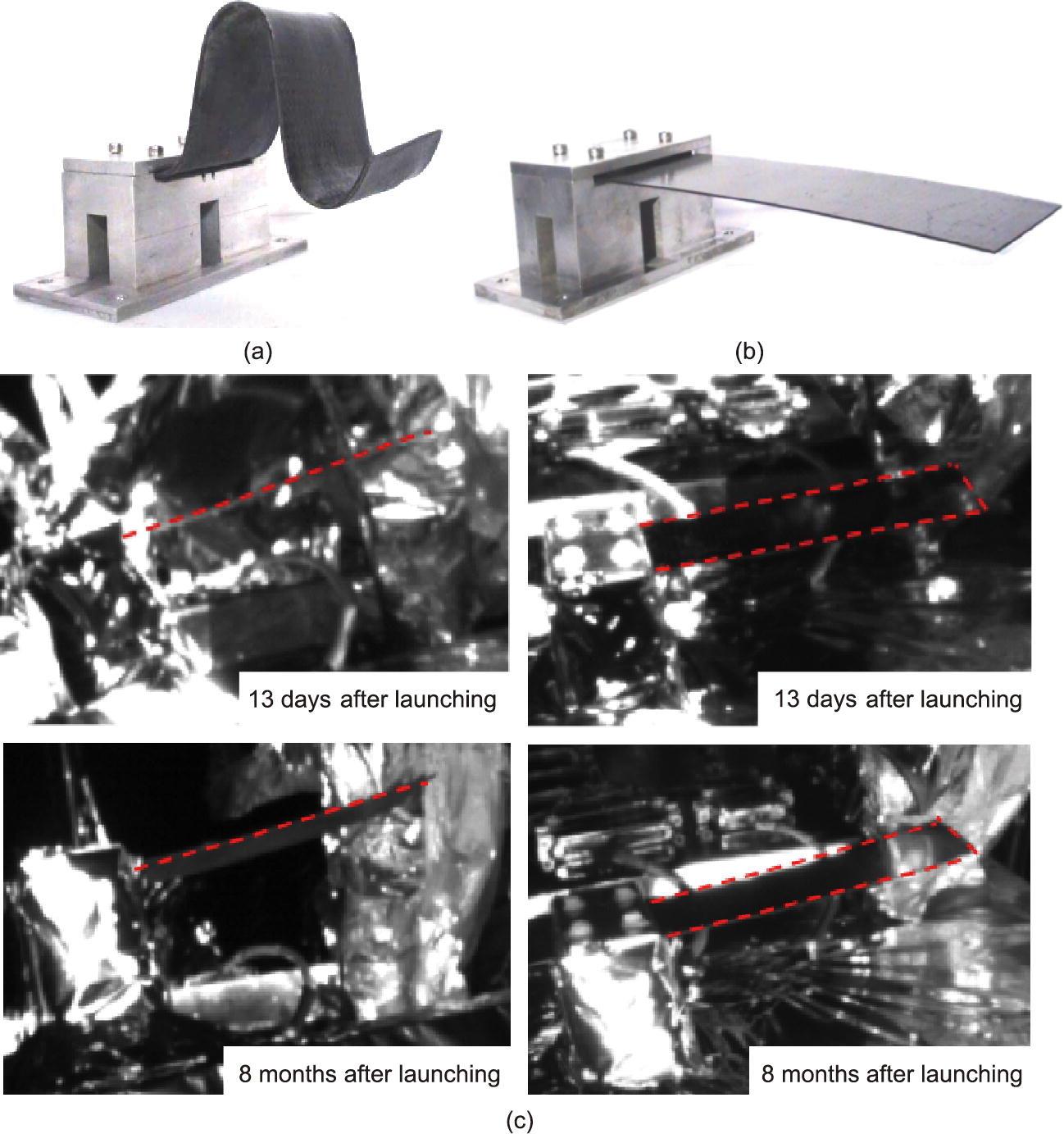
图14 Mission SMS-I。(a)收拢构型;(b)展开构型;(c)发射后13天和8个月的轨道图像。
2020年,一种SMPC柔性太阳翼系统(SMPC-FSAS)在世界上首次实现了基于SMPC的在轨展开[22]。一个由SMPC组成的透镜管驱动和展开SMPC-FSAS,该透镜管在发射过程中以卷曲的形式折叠,然后由基于氰化物的SMPC锁定机构锁定。当进入轨道并解锁后,柔性太阳翼的展开由透镜管驱动,如图15所示。
《图15》

图15 SMPC-FSAS飞行硬件的在轨释放和展开演示。(a-i)、(a-ii)太空中的解锁过程;(b-i)~(b-iv)太空中的展开过程。
《2.3 深空探测领域可展开结构与机构研究进展及应用》
2.3 深空探测领域可展开结构与机构研究进展及应用
深空探测是人类对天体或空间环境开展的探测活动,我国正处在由深空探测大国向强国转型的关键阶段。国家制定了月球、火星、木星及卫星、小行星、彗星和太阳系边际探测发展规划,已启动月球科研工作站和火星科学工作站建设工作,并计划适时启动载人探月等探测任务[54‒55]。
嫦娥三号/四号巡视器,又称“玉兔号”,如图16、图17所示[56‒57]。其展开结构与机构主要包括太阳翼机械部分、桅杆和机械臂,属于结构与机构分系统。其中,为减少系统质量资源消耗,太阳翼机械部分的右太阳翼采用单自由度步进电机驱动,实现对日定向转动;左太阳翼采用弹性组件展开并锁定的方案,从而配合热控分系统,通过太阳翼收拢覆盖散热面来达到切断舱内与外部环境热交换的目的,解决了月夜极低温环境和整机断电无自发热情况下的热控保温问题。同时,采用机构功能复用的系统设计思路,将相机和定向天线的指向机构综合集成于桅杆上,设计三自由度驱动的桅杆,可分时实现天线对地定向以及相机对周围360°范围成像。
《图16》

图16 嫦娥三号巡视器。
《图17》

图17 嫦娥四号巡视器。
作为一种智能材料,SMPC具有在环境刺激(如热、磁、电等)下保持暂时形状和恢复原始形状的能力。在中国第一次火星探测[天文一号(Tianwen-1)火星探测] 期间,这种智能材料也被用于在这颗红色星球上悬挂中国国旗[58‒59]。该机械装置的灵感来源于一幅古老的纸莎草卷轴,并运用了动态演示,如图18所示。这一验证将此智能材料的应用范围从地球静止轨道扩展到了深空,有望取得更多的突破。
《图18》

图18 天问一号火星探测器在火星登陆后展开五星红旗。(a)着陆平台;(b)巡视器。
《3、 空间可展开结构关键技术》
3、 空间可展开结构关键技术
《3.1 空间可展开机构设计》
3.1 空间可展开机构设计
《3.1.1. 大尺度可展开机构构型设计技术》
3.1.1. 大尺度可展开机构构型设计技术
空间可展开机构的构型设计要同时考虑展开稳定性、同步性、避奇异等机构学特性以及形面精度、大展收比、高刚度等结构学特性。此外,可展开机构展开过程可表现出不同的拓扑结构及不同的数学物理模型,其机构的拓扑构型为非定常构型,因此需要研究大型可展开机构的理论构型设计方法,以考虑可变拓扑的多种构型的影响。
《3.1.2. 大尺度可展开机构误差分析与精度设计技术》
3.1.2. 大尺度可展开机构误差分析与精度设计技术
由于制造工艺、装配的限制及空间极端环境的影响,大尺度可展开机构难免存在多种误差源,如构件的尺寸误差、运动副的间隙、构件的热变形等。由于机构运动和位姿的变化,机构误差的传递会引起不可控的构型变化,造成运动不同步、卡死与变形等机构失效情况。因此,对大尺度可展开机构进行误差分析与精度设计是极其必要的。
《3.1.3. 可展开结构设计和形成过程中的潜在运动奇异性》
3.1.3. 可展开结构设计和形成过程中的潜在运动奇异性
大型可展开机构是一个具有多个空间闭环和柔性结构的动态系统。机构的展开是一个从机构到结构的复杂转换过程。此外,在机构的展开过程中,存在潜在的运动奇异性。这种分叉/多分叉行为在相关研究中已有报道。迁移率和奇异性分析[60‒61]、迁移率和多分叉分析[62]、低阶对称机构模态以及可展开机构的分叉行为分析[63]是无法忽略的研究内容。
《3.2 空间可展开索膜结构成型设计》
3.2 空间可展开索膜结构成型设计
索膜结构是一种空间结构形式,其中高强度膜材料和索通过产生一定的预应力在空间中形成一定的形状。影响空间可展开索膜结构型面精度与稳定性的关键因素包括网面拓扑构型、网面几何布局以及索膜张力分布,涉及以下关键技术。
(1)型面误差分析与设计技术。网状天线的反射器是使用小三角形面或四边形面近似抛物面形成的。正确评估反射面几何形状的型面精度是设计高精度反射面的基础和前提。对于空间网状天线,较小尺寸的网格可获得更小的原理误差,但意味着更多的索网节点和索段数,增加了制造、装配和调试的难度,因此需要研究高效的型面误差分析与设计方法[64‒65]。
(2)静力与运动确定性拓扑构型生成技术。为保证空间网状天线的重复展开、收拢精度,要求天线结构具有运动及静力确定性。静力和运动确定性构型从拓扑结构上保证了网状型面在外荷载作用下的尺度稳定性,而且易施加平衡预张力获得所需的结构刚度[66]。
(3)几何预张力耦合设计技术。网状天线反射面由柔性索膜张拉而成,索膜材料本身不能受压也不抗弯,要使索膜结构正常工作必须引入适当的预张力。如图19,在保证高型面精度的同时,为了增加天线抗干扰能力,还要保证索段张力的均匀性,需要进行几何与预张力耦合设计[67‒69]。在图19中,
《图19》

图19 网状反射器测地线几何成型方法。
(4)性能退化预测及补偿技术。空间结构构件通常采用复合材料,其应力-应变关系表现为时间、应力及温度耦合相关的非线性黏弹性,导致其空间服役过程中的性能退化。为合理评估或延长空间结构使用寿命,涉及多源非线性耦合下非线性黏弹性力学建模、精度被动设计补偿以及在轨精度主动调整及补偿技术。
《3.3 空间可展开结构动力学分析》
3.3 空间可展开结构动力学分析
空间可展开结构具有收拢和展开两种状态,且从收拢状态到展开锁定状态涉及多柔体展开过程。为保证空间复杂环境下可展开结构的动力学性能,涉及以下关键技术。
(1)展开过程动力学建模求解技术。空间可展开结构含有绳索、薄膜以及薄壳等大柔性构件,为防止展开过程中绳索与绳索、绳索与桁架之间可能产生的接触缠绕与钩挂现象,需要进行网面管理。对于薄膜结构展开,需研究折叠方式对展开过程接触碰撞、展开到位后折痕对型面精度等影响。因此,需要对大柔性空间可展开结构的大尺度运动进行准确的刚-柔耦合建模[70],利用动力学分析获得可展开结构展开过程中的受力状态,以优化结构构型和尺度。
(2)展开过程可靠性设计及控制技术。可展开结构必经的展开阶段从不稳定状态到稳定状态,是最容易出现故障的环节之一。可展开结构可靠性很大程度上取决于关键的设计参数。展开过程控制设计主要是对展开过程进行运动规划,利用逆动力学分析获得展开过程的驱动力谱,以控制展开时间和降低展开到位后的冲击。
(3)空间环境下动力学分析及设计技术。空间可展开结构收拢状态要承受发射时的强烈振动与巨大冲击,在轨展开工作状态处于失重、辐射和±170 ℃的温度交变等外空环境,需要保证展开/收拢两状态下结构动力学性能最优,涉及两状态动力学性能综合设计技术。此外,需要研究考虑热交变下的空间结构热致振动问题[71‒72]。
《3.4 空间可展开结构环境适应性及地面验证》
3.4 空间可展开结构环境适应性及地面验证
空间可展开结构作为航天器的关键结构,一般安装于舱外,直接面对严苛的空间环境。针对各种空间环境,空间可展开结构作为一种大型复杂机械系统,需要重点考虑自身结构对发射过程及在轨运行期间的空间环境适应性。基于此,空间可展开结构研制阶段需充分考虑地面模拟环境下的验证试验技术。为确保空间可展开结构成功发射、可靠展开、稳定运行,其环境适应性和地面验证涉及以下关键技术。
(1)力学环境适应性。对于空间可展开结构,发射环境主要指在运载火箭动力飞行阶段及星箭分离阶段,由运载火箭产生、通过航天器平台传递给可展开结构的力学环境载荷,具体包括加速度、正弦振动、随机振动、噪声、冲击等。另外随航天器进入预定轨道后,可展开结构可能会承受其他载荷或自身正常工作引起的冲击、振动等力学载荷。
(2)空间热环境适应性。空间可展开结构的成功展开是所有机构、结构协同工作的结果,而温度条件是协同工作良好的前提条件,因此热设计要确保所有部件在轨展开时温度条件下均正常工作且配合良好。可展开结构展开到位后,在轨工作期间,由于航天器、地球及太阳之间的相互运动,不停地处于被太阳照射、被地球或航天器遮挡的循环过程中,与此对应的结构温度将不停处于高温、低温交变过程之中。温度交变及内部大温差都会引起结构尺寸发生变化[73],控制这种由温度引起的变形对空间可展开结构设计工作提出了很高要求,相应地,在研制过程中要进行必要的地面试验对结构性能进行验证。
(3)空间其他环境适应性。空间可展开结构在轨运行期间,不可避免地受到辐射环境、原子氧环境、真空环境等空间环境的影响,会造成可展开结构的材料、机构功能及性能改变[74‒77],因此可展开结构在设计阶段要根据航天器轨道环境和寿命进行环境适应性分析,严格选择材料和热控涂层等的类型。
(4)地面验证技术。与地面展开环境相比,空间可展开结构在轨展开阶段的环境包含无重力、真空、高低温等不同之处,而这些不同对结构性能、力学性能带来明显影响。由于运动部件众多、展开过程复杂,空间可展开结构研制阶段必须在模拟环境下开展充分、合理的地面验证,确保在轨成功展开。
《4、 空间可展开结构发展与趋势》
4、 空间可展开结构发展与趋势
空间可展开结构在射电天文、移动通信、空间科学、深空探测等方面发挥了越来越重要的作用。因此,为了适应快速的发展和需求,针对空间可展开结构,需要从以下几个方面进行深入的研究。
《4.1 网状天线》
4.1 网状天线
随着空间技术的不断发展及在移动通信、深空探测等方面应用的深入,空间大型网状天线发挥着越来越重要的作用,其发展也进入了新的阶段。
《4.1.1. 单体自展开式极大型天线》
4.1.1. 单体自展开式极大型天线
综合考虑性能、发射建造成本、技术成熟度等各方面因素,采用单体自展开方式仍是某些航天任务所需的极大型天线的实现方式之一。针对此类天线,需要开展高收纳比新型结构/机构设计技术研究。
《4.1.2. 轻质、高收纳比小型化网状天线》
4.1.2. 轻质、高收纳比小型化网状天线
未来空间卫星,尤其是商业航天卫星,正朝着小型化、微型化和组网化快速发展。小型网状天线具有收纳比高、轻量化、成本低、配置灵活等特点,可为微纳卫星平台提供简单、可靠、轻质的可展开天线,将是未来空间网状天线趋于小型化的一种重要的发展方向。小型网状天线在商业航天中主要的结构形式包括:折叠肋天线、缠绕肋天线、张拉桁架天线、环柱天线、可展开抛物柱面天线、可展开薄膜天线等。
《4.1.3. 有源馈电网状天线》
4.1.3. 有源馈电网状天线
传统的大型天线一般可分为反射面和相控阵两种体制。反射面天线具有系统简单、轻量化等特点,较适用于航天应用;相控阵天线是天线领域重要的发展方向,其波束灵活、扫描速度快,但其系统相对复杂、沉重,难以在轨实现极大口径。因此,可以结合反射面及相控阵二者各自的优点,既实现一定范围的电扫描,又能通过反射面实现较大增益。例如,在通信卫星中,可以利用相控阵馈源实现自动控制波束指向和增加波束数目等功能,利用反射面提高天线增益;在抛物柱面天线应用中采用相控阵馈源,可以实现一维扫描、另一维聚焦,满足多种航天任务的应用。
《4.1.4. 静电成形薄膜反射面天线》
4.1.4. 静电成形薄膜反射面天线
薄膜反射面天线具有精度高、轻量化、体积小、易于折叠和展开等优点。静电成形薄膜反射面天线使用边界索力、气体压力和静电力来确保由镀铝聚酰亚胺所形成的薄膜反射面的表面精度。与网状天线相比,静电成形薄膜反射面天线可以扩展到X、Ku波段或更高的频段,并可以通过静电调节实现主动表面控制。因此,薄膜反射面天线代表了未来超轻、高精度和大口径空间天线的一个重要发展方向[78‒79]。
《4.2 太阳翼》
4.2 太阳翼
随着航天技术的不断发展,对太阳翼的需求也在变化,呈现出不同的特点:通信领域随着电推进系统的应用,对太阳翼的功率需求由10 KW量级提升到30~50 KW量级;对低轨星座类型卫星提出批产、小包络、低成本需求;遥感领域主要是高刚度需求。因此太阳翼的发展也进入了新的阶段。
《4.2.1. 轻质、高收纳比太阳翼》
4.2.1. 轻质、高收纳比太阳翼
在太阳翼技术方面,刚性/半刚性太阳翼自身收拢包络、质量与其展开面积近似成正比,这种特性无法适应超大功率航天器需求,尤其是自身包络太大,将超出运载能力。而柔性太阳翼的收拢包络、质量与其展开面积呈显著的非线性特点:随着展开面积的增加,其质量、收拢包络增长缓慢。所以柔性太阳翼特别适用于超大功率及对包络要求苛刻的航天器。随着原材料、生产工艺技术的不断提升,卷式柔性太阳翼再次成为各航天大国研究的热点。从收拢包络、功率质量比等技术指标看,该类产品有望成为传统刚性、半刚性太阳翼的升级替代产品。
《4.2.2. 基于柔性电池的超柔性太阳翼技术》
4.2.2. 基于柔性电池的超柔性太阳翼技术
随着电池技术在高效薄膜型太阳能电池技术研究方面取得了重大突破,太阳能电池参与太阳翼收拢卷迭动作成为可能。这将带来空间太阳翼总体构型的全面革新,更薄、更轻的薄膜型太阳能电池与由无需增设缓冲材料的超轻柔性基底组合而成的全柔性太阳毯结构,具有巨大收纳比指标优势的卷迭式收拢压紧方案将成为未来空间太阳翼的主流技术方案。采用全柔性太阳毯结构、卷迭式收拢压紧技术方案后,太阳翼产品将从常见的长方体状收拢构型转变为圆柱状、薄型多边形构型,航天器的总体布局也将大大简化。太阳翼将在可扩展性、收拢包络、功率质量比等指标上远超现有产品,在展开刚度、展开惯量、抗过载能力方面将显著优于国内外现有的柔性太阳翼产品。
《4.2.3. 模块化和可更换太阳翼技术》
4.2.3. 模块化和可更换太阳翼技术
随着对超大型太阳翼需求的不断增加,以及对空间太阳能发电站等项目论证的需要,国外已经投入了大量经费开展此方面的研究。国内目前也开展了相关技术研究,但考虑功率需求都在兆瓦级以上,单个太阳翼实现此功能的技术和经济性较差,因此要求太阳翼能够实现在轨组装,模块化和可更换太阳翼也即将成为国内外重点发展方向之一。
《4.3 可展开机构》
4.3 可展开机构
可展开机构具有收拢和展开两种状态,为保证空间复杂环境下可展开机构的整体性能,涉及以下关键技术。
(1)空间可展开机构与卫星平台一体化设计。随着空间可展开机构向超大型化发展,卫星平台尺度远小于可展开机构展开后尺度,传统的以卫星平台为总体结构、以可展开机构为有效载荷的设计方法无法满足可展开机构大型化发展的需要。可展开机构已成为航天器的主结构,卫星本体作为服务平台,需要为可展开机构提供通信、导航、测控、推进、能源等保障。可展开机构与卫星平台成为不可分割的有机整体,需要按照可展开机构的功能要求导出卫星平台的设计输入,实现可展开机构与卫星平台的一体化设计。而目前国内外尚无成熟的一体化设计方法。
(2)新材料应用与结构轻量化。传统的可展开机构多为桁架式结构,主要由刚性杆件与关节铰链构成,采用电机控制。随着可展开机构的大型化,其本体质量急剧增大。可展开机构轻量化设计是亟需解决的关键问题之一。近年来随着材料技术的发展,新材料在可展开机构中获得越来越多的应用,如用碳纤维复合材料替代普通金属材料、用柔性索替代刚性构件、用由智能复合材料制作的驱动元件替代驱动电机、用薄膜材料替代刚性天线面板等。新材料应用大幅度降低了可展开机构质量,但也导致了系统刚度的降低,影响了在轨工作的稳定度,需通过多构态结构优化设计来提高系统刚度。
(3)超大型复杂系统动力学及控制。超大型可展开机构在轨工作时是一个大柔性系统,系统的第一阶固有频率甚至低于0.1 Hz,其动力学行为极其复杂;而且可展开机构由大量的杆、索、网(或膜)组成,存在大量柔性元件,传统的有限元动力学模型已不适用。近年来发展起来的绝对节点坐标法虽然可以处理大柔性问题,但还不能解决大规模柔性结构的动力学分析问题,在计算时间、计算效率等方面难以满足要求。超大型复杂柔性系统动力学建模与分析问题是可展开机构的关键问题。另外,超大型可展开机构对星体动力学与姿态控制产生很大影响,由于存在大柔性与大惯量问题,因此给卫星姿态控制和变轨调节带来很大挑战。
(4)大柔性展开机构地面试验与测试。目前二维重力补偿技术已较成熟,空间三维重力补偿技术尚不完善,尤其是大范围三维重力补偿问题,仍是国际上可展开天线面临的难题之一。另外,对于大柔性展开机构,一般采用摄影测量系统进行型面精度测量,现有的非接触式激光测振仪无法完成全尺寸样机的振动模态测试,需要采用缩小比例或局部性样机进行地面测试,再通过仿真软件和地面测试数据预示全尺寸天线机构在轨状态下的工作性能参数。建立大型可展开机构的虚拟仿真与地面实物测试的天地一体化验证系统十分必要。
《4.4 在轨型面调整》
4.4 在轨型面调整
在轨天线系统的需求和要求朝着轻量化、高精度、高频段方向发展,对在轨天线系统进行主动精度控制和调整研究对于空间航天器的发展具有重要的学术和工程意义。
《4.4.1. 固面天线在轨型面自适应补偿技术》
4.4.1. 固面天线在轨型面自适应补偿技术
毫米波和亚毫米波遥感载荷的需求对于大型、高精度轻质反射器提出了越来越高的要求。影响固面天线型面精度的主要因素为制造装配误差和在轨热变形,需要研制高精度智能材料或结构,以补偿反射器结构型面误差。
《4.4.2. 在轨可重构天线技术》
4.4.2. 在轨可重构天线技术
传统天线系统采用固定反射面,所照射的服务区固定不变,限制了其使用范围。可重构天线通过新材料和新型作动器改变天线所需的赋形波束,以照射多个服务区域,具有一星多用、节约发射成本等优点。
《4.4.3. 可展开薄膜光学技术》
4.4.3. 可展开薄膜光学技术
空间薄膜衍射系统具有轻量化、直径大、公差宽松以及可折叠展开等优点,能显著减小发射体积和质量,大幅度降低制造难度和发射成本。但由于薄膜自身厚度较薄,导致难以进行形状精度控制。需要采用新工艺、新结构和新型作动器技术,补偿空间热交变和较大温度梯度导致的型面偏差。
《4.4.4. 在轨主动指向与对焦调整技术》
4.4.4. 在轨主动指向与对焦调整技术
由于装配误差、热变形、卫星平台伸展臂的展开误差导致天线波束指向偏差和性能下降,因此需要天线具有在轨主动指向和对焦调整技术,实现天线波束指向在装配误差和微振动下的精确调整功能,提高波束在轨指向性能和稳定性。
《4.5 在轨组装及建造技术》
4.5 在轨组装及建造技术
尺寸达千米量级的超大型航天器,如空间太阳能发电站、超大型空间载荷(SAR、天基雷达等)、超大型空间科学探测器[甚长基线干涉测量(VLBI)、天基望远镜等]和未来空间城市等,将在未来空间资源利用、高分辨率对地观测、宇宙奥秘探索和长期在轨居住等太空活动中扮演越来越重要的角色。受限于运载火箭的单次运载能力,目前超大型空间结构系统最有前景的构建方式之一是通过结构模块化可展开结构设计、多次发射及在轨组装来完成。需要进行有人或无人参与的可展开结构模块在轨组装技术研究。此外,相比单体展开和在轨组装方案,在轨建造受运载能力的约束小、成本低、扩展性强,将逐渐成为太空在轨建造的重要手段,是公里级超大型空间结构在轨建设和维护最有效的途径。需要研究可展开结构在轨自组装、在轨增材制造等新技术。
《5、 结论》
5、 结论
随着航天科技的发展,空间可展开结构发挥着更加重要的作用。我国在开展可展开结构关键技术的研究中取得了很大的进展和成果,但目前相关的理论和试验研究还不够系统、不够成熟。文中综述了当前我国可展开结构研究的最新进展,指出了为适应未来空间技术的发展,可展开结构还需要研究的问题,并提出了用于解决问题的思路,为下一阶段对可展开结构进行深入系统的研究提供了借鉴。











 京公网安备 11010502051620号
京公网安备 11010502051620号




