
《1、 深海海底勘探》
1、 深海海底勘探
大部分海洋资源都位于海底,如深海锰结核、富钴结壳、热液硫化物等。海底是海洋科学观测的主要区域[1‒6],在海底建造的许多人工建筑需要进行监测和维护。例如,热液喷口区域周围的深海生物的长期和缓慢的生长模式需要用常驻潜器进行观察和监测[7]。此外,对海底的监测也引起了军事力量的高度重视。
到目前为止,由于各种技术上的困难,能够协助人类到达海底的手段很少[6,8]。潜水器是用于水下探索的主要工具(图1),如自主潜水器(AUV)、遥控潜水器(ROV)、海上滑翔机等,它们将人类探索的范围扩展到了以前无法到达的未知区域。AUV的机动性不受脐带电缆的限制;然而,它们的鱼雷形状和欠驱动特性使它们很容易被困在海底附近。ROV本质上欠驱动系统,因此其在复杂地形中的航行能力不足,连接甲板控制站的脐带电缆进一步降低了ROV在有限空间内的机动性。深海潜水器(DSV)可以将人类带到海底,但通常工作区域受到很大限制。在地形复杂或导航空间狭窄的情况下,传统的潜水器的应用受到很大的限制。
《图1》
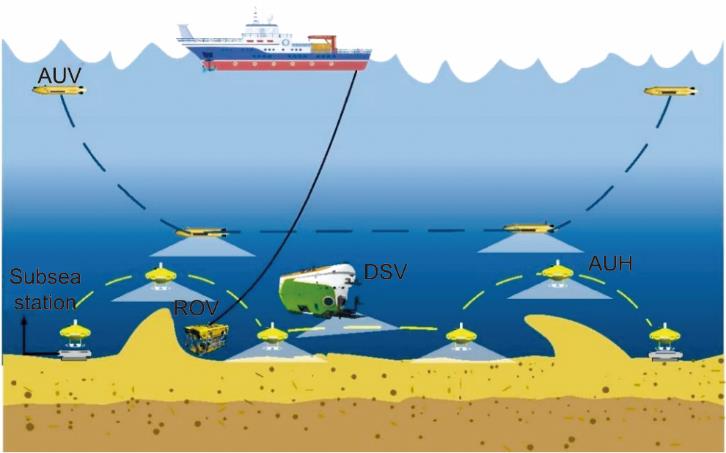
图1 各种水下无人潜水器。AUV:自主潜水器;ROV:遥控潜水器;DSV:深海潜水器。
随着海洋设备和技术的发展,潜水器呈现出越来越多的新形式(图2)。履带式的潜水器可直接在海底移动,被广泛应用于长期监测[9‒10]和深海取样[11]。轮式车辆通常重力较小,这限制了其机动性[12]。一些潜水器使用仿生结构和运动系统[13],模仿鱼类[14‒18]、蝠鲼[19‒21]、章鱼[22‒23]和螃蟹[24]等生物的运动方式,也逐渐被开发出来。
《图2》

图2 海底潜水器的种类。
对海底的近距离观测探测,需要新型的潜水器,它们能够逼近海底或在海底工作,能在海底起降,能在任何高度悬停[25]。现有的潜水器原型并不足以提供一个有效的平台来进行海底的原位近距离探测和大规模观测。主要挑战体现在三个方面:①潜水器必须以超灵活的方式调整姿态和方向,以适应复杂的海底环境;②为了避免过于频繁地浮出海面,潜水器必须在海底进行充电和数据传输;③潜水器必须能够在复杂的海底水声环境中导航,并完成海底接驳对接,以获得电能并实施通信。
我们试图设计并成功研发一种可以在海底附近自主巡航的潜水器。①常驻海底的工作方式对其外形设计有特殊要求。一方面,潜水器需要在靠近海床的水平面上任意方向机动;另一方面,潜水器需要在大范围内航行,因此需要旋转体结构和水平方向的流线型外形来减小阻力。②新型潜水器被设计成由海底基站支撑,提供电力和数据传输。③需要利用声光导航确保成功对接到基站。
《2、 AUH——AUV家族的新成员》
2、 AUH——AUV家族的新成员
《2.1 新概念的提出》
2.1 新概念的提出
受底栖生物魟鱼的启发,我们研发了一种圆碟形的潜水器——AUH(图3),它可以在海底起降,并在任何高度悬停。它可以配备各种传感器进行科学调查,必要时甚至可以配备一两个机械手来执行工作。AUH既可以在AUV模式下工作,也可以与水下停机坪协同工作。水下导航采用被动逆超短基线(pi-USBL)加上惯性测量单元(IMU)完成,并根据实时传感信息和地理位置调整路径。在不同AUH之间采用水声通信方式进行网络通信。
《图3》

图3 受魟鱼所启发的AUH。
自主执行任务的续航能力是无人自治式潜水器设计中的一个重要挑战。水下基站的使用可以使潜水器进行接驳充电和数据上传/下载,这提供了一种在不影响推进和有效载荷功率预算的情况下延长潜水器运行时间的方法[26‒30]。然而,由于水中存在水流和障碍物,以及基站和潜水器之间的相对动态方向差异,自主水下对接变得尤为复杂。因此,一个强大的对接制导系统是确保潜水器成功对接的核心和关键组成部分。AUH的对接基座为水下停机坪,如图4所示。
《图4》
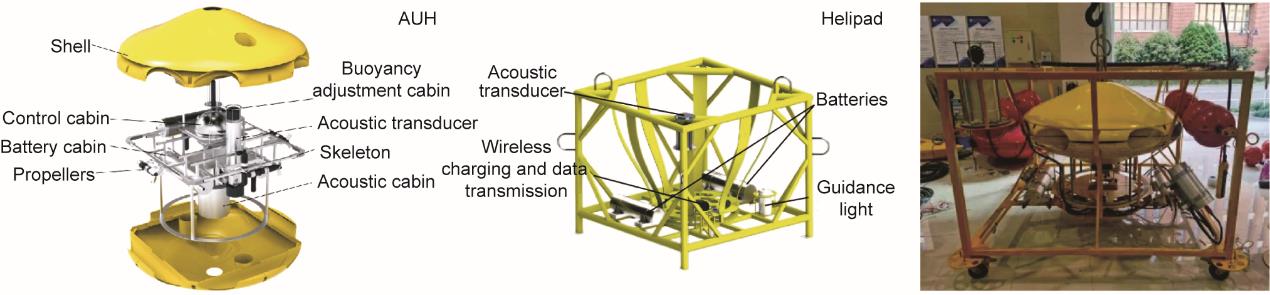
图4 AUH及其海底停机坪。
根据AUH与水下停机坪的合作模式,系统运行有三种场景:①水下停机坪与海底观测站连接,AUH在网络中作为移动平台运行:②由水面船通过光电复合电缆布置水下停机坪,AUH在水下停机坪的支撑下进行海底长期作业;③AUH工作在AUV模式下,无需水下停机坪。这三种场景可根据工作需求来进行确定。
《2.2 AUH的发展》
2.2 AUH的发展
基于之前的经验,我们开发了一系列AUH原型[31‒37],并逐步开始产品化过程。AUH可以配备各种类型的传感设备,以适应不同的应用场景。AUH的发展演变如图5所示,其中,数字表示原型机的启动年份。Mini-AUH是第一代概念原型,具有四个水平螺旋桨和一个光学定位系统,它验证了圆碟形AUH的基本运动。基于mini-AUH的概念,我们开发了一个直径为1 m的S-AUH,配有简单的声学定位系统,以进一步研究水动力特点和悬停性能。在国家重点研发计划项目的资助下,我们设计开发了功能更全面的G-AUH,实现了如声学定位、浮力调节、无线充电、在声光制导下与水下停机坪对接等功能。G-AUH工作水深为1000 m,并且在千岛湖和中国南海进行了测试。2019年,我们开始定制针对不同应用场景开发的AUH。ICE-AUH是为观测北极冰层下的藻类而设计的。ICE-AUH配备了声学定位系统,能够以信标为中心完成极坐标定位。Coral-AUH是为珊瑚礁生态观测而设计的,配备了高清(HD)摄像机,以及叶绿素计、盐度计、pH计、浊度计和溶解氧浓度计等多种传感器。OT-AUH是与浙江欧深泰海洋科技公司合作开发的工程机原型,面向各种工业应用场景,搭载不同的载荷,以满足不同的应用需求。
《图5》
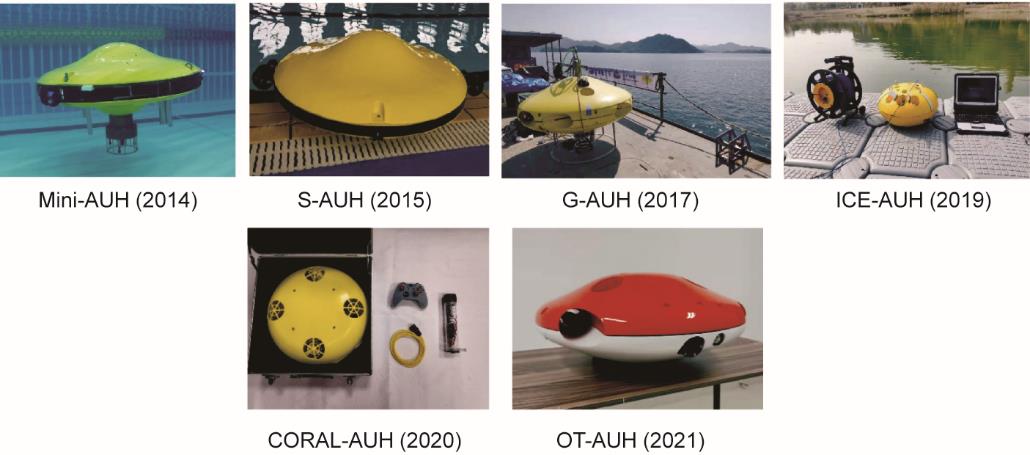
图5 AUH系列样机的发展与进化。
《3、 AUH实现》
3、 AUH实现
《3.1 系统集成》
3.1 系统集成
AUH系统由AUH本体、控制台和水下停机坪组成(图6)。AUH进一步可分为支撑结构及通信、控制、驱动、操作、导航和辅助模块(可充电电池通过能源管理系统为所有单元提供电力)。
《图6》

图6 系统架构。DVL:多普勒速度记录仪。
AUH详细的结构组成如图4中的左图所示。AUH的外壳是一种呈圆碟形的薄壳,主要用于保护AUH内部部件免受水流的破坏性冲击,并提供优异的水动力性能。骨架是AUH内承载及固定压力舱、螺旋桨、传感器和其他部件的重要结构。压力舱为控制系统硬件和电池、浮力调节装置及相关部件提供保护。驱动模块由2~4个垂直方向螺旋桨、2~4个水平螺旋桨、浮力调节系统和重力调节系统组成。
AUH采用声光组合导航方案(图7)。在一定距离内,AUH通过声学换能器确定其位置,并向水下停机坪方向导航。在接近水下停机坪时,AUH逐渐调整姿态以对准目标方向。靠近后,AUH通过机器视觉算法跟踪导航灯,精确调整位置和姿态,成功与水下停机坪对接。
《图7》
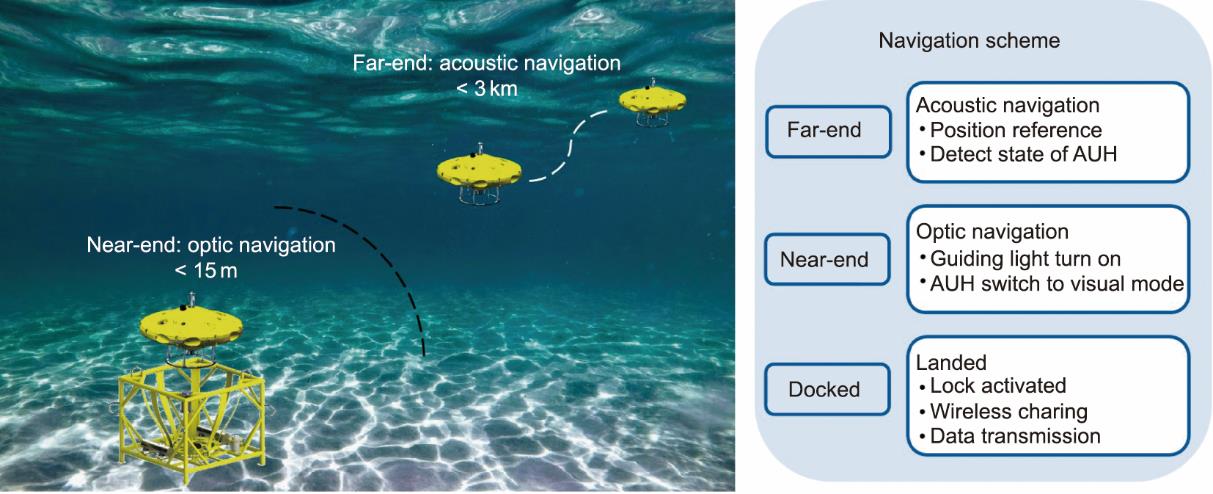
图7 声光组合导航方案。
图8进一步说明了AUH水声定位系统的独特性。与传统的超短基线(USBL)定位系统(收发器安装在母船下方,应答器安装在海底目标上)不同[38],我们的pi-USBL系统由放置在母船或海底站的单个声学信标和移动AUH上的被动接收阵列组成。pi-USBL定位系统的优势主要体现在以下三个方面[39‒42]:① pi-USBL系统具有成本低、功耗低、重量轻的特点;②与传统的USBL系统一样,潜水器能够通过声学通信设备获得瞬时声学测量,而无需等待上层测量;③信标的全向定位脉冲使多潜水器无源接收机能够同时进行自定位和导航,这对多潜水器应用具有重要意义。
《图8》
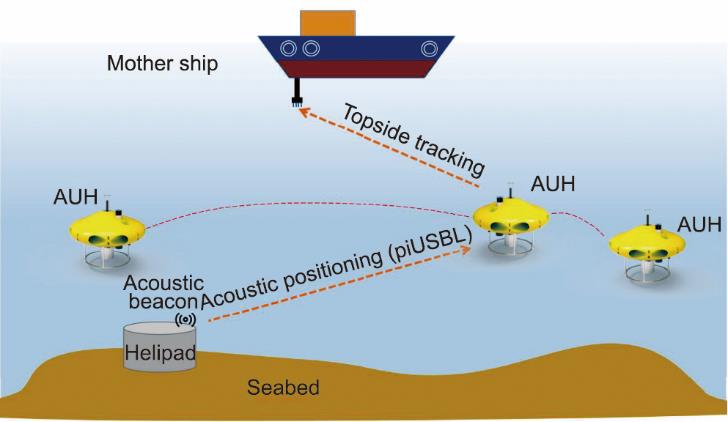
图8 AUH入坞直升机坪。
《3.2 野外试验》
3.2 野外试验
在水池和湖泊进行了一系列初步试验后,研发团队在南海进行了海上试验,如图9所示。海上试验的目的是测试AUH的操作性能,如机动性和导航能力。在pi-USBL和声光组合导航下,AUH能够完成直线前进、全周转向、定点悬停、浮沉、在水下停机坪降落和起飞等机动性测试。在水面船上的控制台可以清楚地看到水下停机坪的运行状态,如图10所示。
《图9》

图9 AUH的中国南海海试。
《图10》

图10 水面船上的控制平台。LED:发光二极管。
在海上试验中,AUH在声光导航下成功地与水下停机坪对接了两次,并与水下停机坪进行了无线充电。水下停机坪是水下机器人的重要平台,是潜水器安全停靠和可靠运行的保障。对近海底巡航、水下停机坪起降、全方位转向、定点悬停、无线充电、声导航跟踪等功能进行了综合试验,证明了AUH的可靠性。
《4、 观点》
4、 观点
我们提出了一种新型的海底驻留式潜水器——AUH,它可以在海底起降并定点悬停。它可以潜入海底并清晰地观察海底,并搭载用于科学调查的相机和传感器。此外,通过与水下停机坪合作,AUH可以通过充电和数据连接在海底长时间停留。与其他潜水器有所不同,AUH以灵活的轨迹巡航,这使其成为在大范围内进行海底精细勘探的理想平台。因此,AUH可以作为现有有线观测网络[43]的重要补充,在整个深海中常规运行,这对支持下一代深海过程的研究至关重要。
另一方面,AUH的缺点也很明显:较大的身体横截面积导致更大的阻力(MethodsX),这使得AUH难以在水下快速巡航或长距离旅行。此外,由于没有电缆进行人工辅助操作,无论是AUV还是AUH都无法进行机械臂抓取等精细的水下操作。由于实验条件的限制,现阶段没有进行水下停机坪辅助下的海底长时间续航、多AUH协同等实验。
总的来说,AUH具有自己独特的特性,这使得它们非常适合某些专用场景。AUH与其他潜水器、ROV和鱼雷型传统AUV的综合比较如表1所示。很明显可以看出,应该如何紧急改进AUH以及它们适合使用的地方。
《表1》
表1 自主水下直升机与其他潜水器相比的优缺点

《5、 结论》
5、 结论
本文提出了一种“魟鱼”式的潜水器,并可以配有水下停机坪,可在特定海域内长期连续完成海底的科学调查、目标探测等任务。具体而言,这项工作的贡献包括:首次研发了AUH原型机,能够①执行全周转向、悬停、在海底自由着陆和从海底起飞等功能;②通过水下停机坪进行无线充电和数据传输以实现长期驻留海底工作;③通过声光复合导航系统与水下停机坪精确对接。AUH作为一种新型的潜水器,在海洋技术领域是一个全新的概念,能够较好地解决海洋AUV的发展与实现。
我们在最近的研究中提出了一些观点。
(1)传统的海洋科技研究主要利用船舶、卫星、ROV、AUV、浮标、循环浮标、滑翔机等进行海洋探索,但由于现有水下平台的限制,无法轻松地进入海底。海底观测站点提供对固定站点的长期实时观测,但范围极其有限。
(2)AUH的发展填补了海底无人自主潜水器(AUV)的空白,对海底作业具有重要意义。AUH的研究扩展了AUV的理论体系。AUH这个名称是中国海洋技术研究人员为海洋技术领域贡献的一个新名词,已被广为接受并在一些主要的海洋科学与技术期刊上频繁使用。
(3)一系列的学术和行业应用证明,AUH已经使海洋,特别是海底的长期作业潜水器成为可能。但是,在水动力优化、减小阻力、近海底水声导航、水下停机坪就地发电等方面,还需要更多的关注和进一步的研究。
(4)为了深入提高AUH的水平和应用,需要发展和完善高精度传感器、水声通信、近海底导航、自主算法等相关技术。
(5)进一步发展AUH技术,将面临巨大的技术、资金和运营挑战。这项工作必须以一个或多个有远见的目标为指导,并得到强有力的财政支持。尽管如此,AUH的发展使得加强人类与海洋的互动成为一个日益可实现的目标。同时对于增强对海底的地球物理、地球化学和生物学理解的潜力,特别是拓展海底的资源勘探、目标探测等工程应用,AUH将可成为一个新的里程碑。











 京公网安备 11010502051620号
京公网安备 11010502051620号




