
《1、 引言》
1、 引言
可重复使用运载火箭(RLV)技术是国家和商业航天发射行业中低成本且可靠的空间运输有效方法[1]。因此,在快速成型和增强发射密度方面已逐渐成为主导趋势[2]。通过回收和重新使用大量翻新的可回收发射系统部件,可以大大降低空间通信、侦察和民用遥感的使用成本。从而使人们能够以更经济的方式探索和开发太空资源[3]。
与伞降方案和翼型方案相比,采用垂直着陆回收方案的优点在于着陆面积小、使用和维护相对容易。由于蓝色起源公司的New Shepard火箭[4]和Space X公司的猎鹰系列火箭[5]已经成功完成了具有里程碑意义的回收任务,垂直着陆回收方案被认为是私营航天机构的首选[6‒8]。稳定着陆是整个回收过程的最终阶段,对于可重复使用运载火箭技术的成功实施至关重要。New Shepard太空舱和猎鹰9号火箭所采用的腿式着陆机构为软着陆提供了更高的可靠性、可行性及足够的安全性。这种应用可以追溯到阿波罗登月舱,该机构采用由铝合金管和吸能蜂窝构成的四足组件作为支撑起落架以适应月球地形[9]。此外,DC-X [10]和DC-XA原型机的支撑系统也采用了类似的改进型伸缩机构[11]。
与桁架式结构或机构创建的着陆支撑系统相比,可重复使用运载火箭充分利用了可展开机构的大折展比、着陆支撑区域大、高效缓冲着陆冲击的优势。New Shepard火箭采用一组带有液压缓冲元件的并联连杆机构,在回收的最后阶段提供软着陆[4]。四腿着陆机构可以完全折叠在舱体内,而不会影响升空时的空气动力学特性。此外,猎鹰系列火箭还采用多级串联伸缩结构的四腿展开机构作为着陆支撑系统,为飞行器的稳定着陆提供了较大的支撑区域[12]。
除了上述研究成果,研究人员还对可重复使用运载火箭关键部件的着陆动力学和性能优化进行了大量研究。为了揭示着陆性能的参数化规律,Zhang等[13]建立了包含初始运动和姿态变化的动态仿真模型以确定可重复使用运载火箭的极端着陆条件。文献[14]考虑了可重复使用运载火箭着陆支柱柔性变形。因此,在研究腿式着陆机构的最终阶段时,行星着陆器和可重复使用运载火箭具有共同的理论基础。文献[15]提出了一种用于月球着陆器的可变阻尼减振器(SA),以防止整个装置在倾斜表面倾覆。文献[16]进一步提出了相应的姿态控制策略,并在半主动起落架系统上进行了实验验证。这些研究成果的优点有利于腿式机构的设计、分析和实现,为可重复使用运载火箭着陆提供安全可靠的保障。
本文提出了一种新型的可展开腿式着陆机构(LDLM),并通过展开和软着陆试验对其性能进行了实验验证。本研究的主要工作可以概括为以下几点。
(1)采用多目标遗传算法(NSGA-II)进化算法建立多目标优化范式,以获得指导可展开腿式着陆机构原型样机设计的最优尺度参数。优化后的支撑机构采用Watt-II型六杆机构。这种可展开腿式着陆机构具有着陆支撑区域大、轻量化、连杆内力合理等优点。
(2)提出了一种重力控制的展开方案,充分利用优化后的Watt-II型六杆机构实现被动展开动作。与现有起落架的展开策略相比,该方案只需轻微的气动初始推力就可以触发机构展开,而不需要使用高压氦气资源,避免了在整个展开阶段进行全程的液压/气动驱动。
(3)研制了全功能可重复使用运载火箭缩比样机,并进行了关键性能验证。实验结果表明,所设计的可展开腿式着陆机构实现了快速平稳的展开(持续时间小于1.5 s),且对座舱的姿态扰动较小(偏航和俯仰波动小于6°)。此外,在0.2 m自由落体测试中,样机提供了令人满意的冲击衰减(加速度峰值小于10g)。为未来的可重复使用运载火箭提供了一种潜在的腿式起落架替代方案。
本文的其余部分结构如下。第2节为可展开腿式着陆机构的概述。第3节详细介绍了可展开腿式着陆机构的多目标优化、展开方案和缓冲性能。第4节给出了展开试验和软着陆试验的实验结果。最后,第5节介绍了结论和今后工作的范围。
《2、 可展开腿式着陆机构概述》
2、 可展开腿式着陆机构概述
《2.1 机构介绍》
2.1 机构介绍
可展开腿式着陆机构如图1(a)所示,由Watt-II型六杆机构、展开触发装置、锁定机构、缓冲器、足垫组成。4个相同的可展开腿式机构沿圆周方向布置在缩比的运载器舱体上,如图1(b)所示。Watt-II型六杆机构经过精心选择和优化设计,在完全展开时可以提供大的着陆支撑区域,同时在完全折叠时结构十分紧凑。这为可重复使用运载火箭在着陆和起飞阶段提供了方便。展开动作的触发装置是气动驱动的,当开关打开时,可以提供瞬时推力来展开每条支腿。此外,锁定机构是定制的,以便在腿部完全展开时为Watt连杆提供就位锁定。此外,为了充分减轻着陆时足部与地面的碰撞效应,在每条支腿的足垫附近安装了一个带有定制铝蜂窝的缓冲器。
《图1》
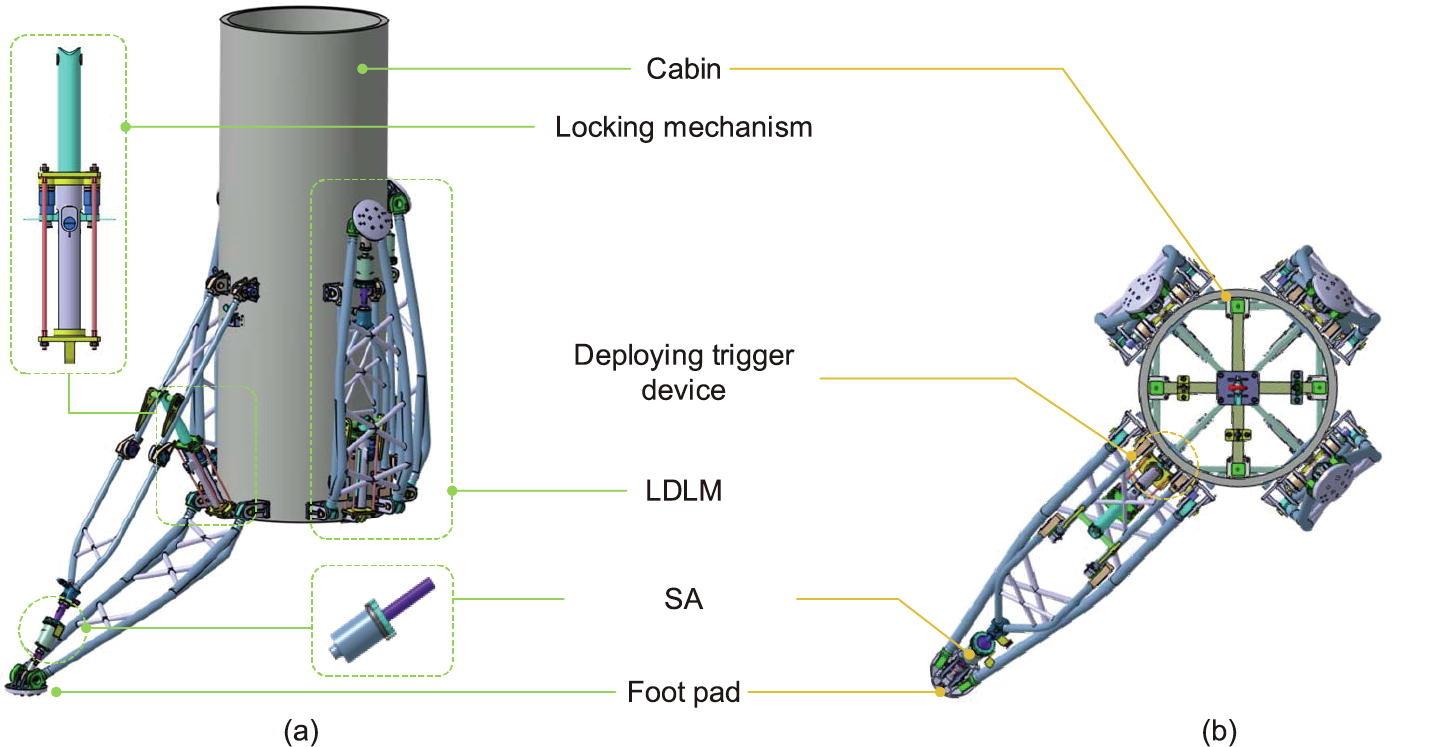
图1 基于Watt-II型六杆机构的可展开腿式着陆机构结构图。
锁紧机构和展开触发装置的细节分别如图2(a)、(b)所示。每个支腿都配备了气动驱动触发装置,其中Watt-II型六连杆机构从初始位置锁定器中释放,以便在气缸产生的脉冲推力下展开。此后,当支腿完全展开时锁定机构启用。锁定机构采用嵌套式筒体结构,在展开过程中上筒体沿下筒体内腔轴线延伸。设计了一种两级弹簧销锁定机构,以保证锁定功能的可靠性。一级锁销限制上气缸在展开结束时的反弹,随后,二级锁销固定一级锁销的销钉,从而提供双重保证,以保持最终完全展开时支腿结构稳定。
《图2》

图2 着陆装置的展开触发装置和锁定机构结构图。
《2.2 工作原理》
2.2 工作原理
可展开腿式着陆机构的主要工作模式为展开模式和锁定模式。在展开模式下,每条支腿都由气动触发,初始驱动释放。当足垫到达底部极限位置时,机构立即切换到锁定模式,其中两级弹簧销锁定机构完全锁紧,等待运载火箭垂直着陆命令。上述工作模式的具体情况如图3所示,图中按时间顺序展示了整个展开过程中相关辅助部件的工作状态。
《图3》
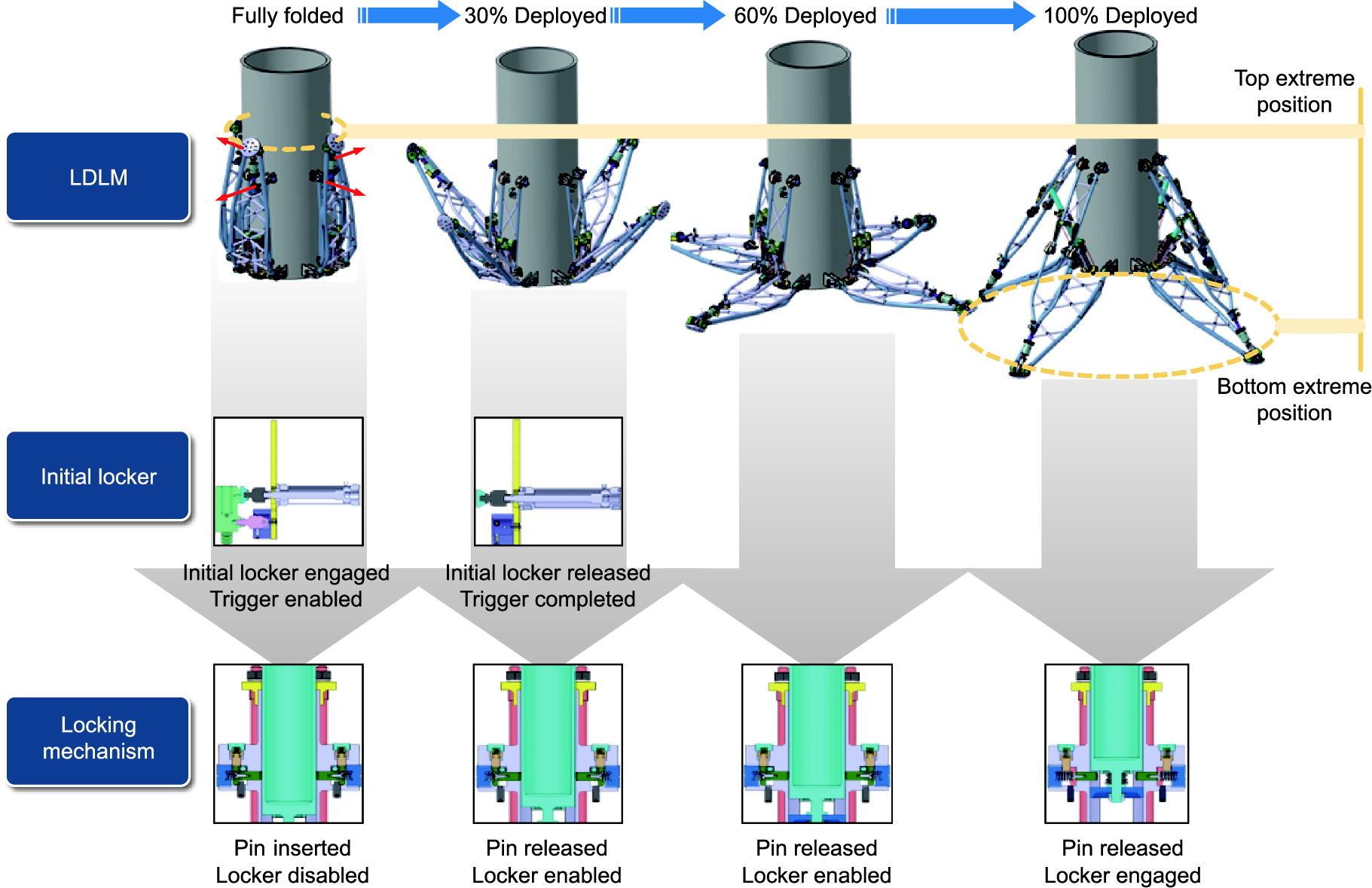
图3 可展开腿式着陆机构的展开流程及关键组件的对应状态。
《3、 可展开腿式着陆机构的研制》
3、 可展开腿式着陆机构的研制
《3.1 基于Watt连杆的着陆机构优化设计》
3.1 基于Watt连杆的着陆机构优化设计
考虑着陆机构的优化设计,整个优化设计概要如图4所示。考虑着陆支撑区域、轻量化和低连接内力等特性,将当前设计任务转化为多目标优化问题。该过程从拓扑选择开始,其中根据Watt-II原理演变选择首选拓扑方案。随后,对所选拓扑进行参数化以进一步制定具有多目标函数和基本约束的优化范式,并获得单腿基本配置的最佳尺度参数,并以此方案设计了可展开腿式着陆机构样机。详细的细节将在后续章节中阐述。
《图4》
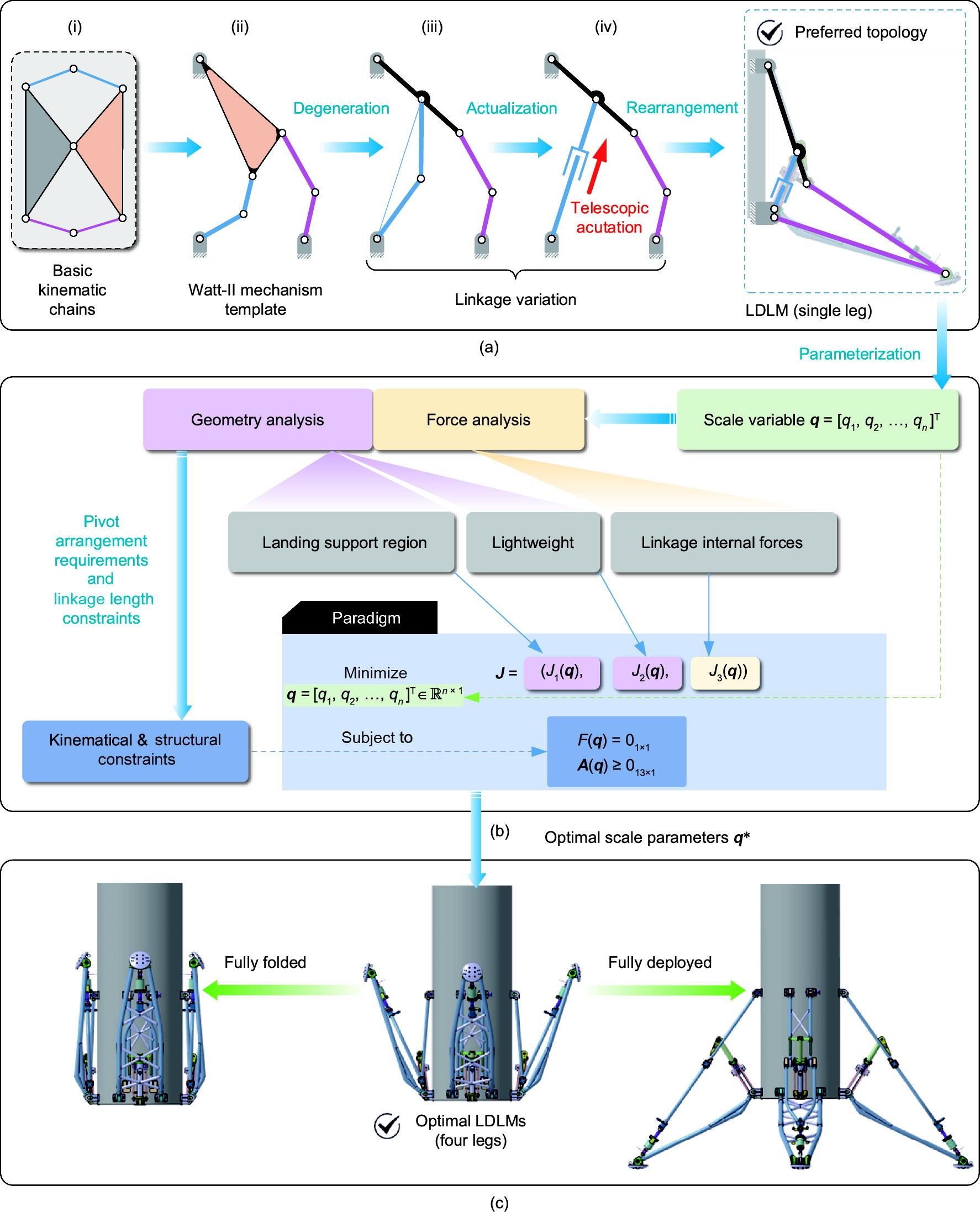
图4 可展开腿式着陆机构的多目标优化过程概要。
《3.1.1. 拓扑选择》
3.1.1. 拓扑选择
拓扑选择从基本运动链的起点开始[图4(a)中(I)]。对于函数生成问题[17],传统的四杆机构只有三个独立的连杆(或等效的设计变量),相比之下,六杆机构(即Watt-II、Stephenson-II和Stephenson-III型)通过精心安排相关控制点[18],可以提供足够的设计可能性来满足可展开腿式着陆机构的工作要求。为了简化机构综合并易于实现,选择如图4(a)中(II)所示的Watt-II机构作为基本构型来构建预期的可展开腿式着陆机构。进一步,将图4(a)中(II)结构改为图4(a)中(IV)结构以得到更好的拓扑方案,并用尺度向量
《图5》

图5 首选拓扑可展开腿式着陆机构的参数化。(b)中红色箭头表示α1~α3的正角方向。
利用尺度变量q1~q9并结合三个固定转轴(A、B、C)、三个运动点(D、E、F)和两个辅助点(G、H)表示待设计连杆组在全展开状态下的拓扑结构,如图5(a)所示。为保证可展开腿式着陆机构成功执行展开动作,改进的Watt-II机构的理想构型如图5(b)所示。引入三个额外的辅助角度变量(α1、α2、α3)来表征完全收拢时可展开腿式着陆机构的可行连杆解,而引入角度变量(θ1、θ2、θ3)来简化第3.1.2节中的公式推导。图5(c)显示了可展开腿式着陆机构在预定平面上的着陆支撑区域。本文采用由4个接触足垫构成的支撑多边形内切圆的直径作为定量评估腿式支撑机构稳定性的通用评定方法[19‒21],进一步评估可展开腿式着陆机构完全展开时的静态稳定裕度。
《3.1.2. 优化范式》
3.1.2. 优化范式
可展开腿式着陆机构的优化设计主要包括以下目标。首先最重要的是,可展开腿式着陆机构应提供足够大的支撑区域,以利用可展开Watt-II机构来增强运载火箭的静态稳定性。其次,通过优化分配各个连杆组件的连杆长度,从几何尺度的角度来看,构成可展开腿式着陆机构单腿的整体连杆应该是轻量化的。最后,在着陆时应抑制各连杆之间的内力,以避免过大的冲击载荷对结构造成破坏。将上述目标转化为变量q1~q9的标量,构成优化目标函数。
对于第一个目标,用支撑多边形内切圆直径来量化可展开腿式着陆机构落地时的支撑区域,如图5(c)所示。根据几何关系,该目标函数可以被表示为一个无量纲函数。
(1)
式中,DR为舱室直径;Dsp为支撑多边形的内切圆直径;Hg为LDLM的离地间隙;J1()为RLV静态稳定性的指标;LDH为足垫的长度偏差,LDH = 120 mm;LCD为点C与点D之间的距离,表示为
(2)
对于第二个目标,采用引入连杆机构等效线密度的等效质量法[22],将复杂连杆机构质量计算简化为平面连杆长度累积问题。假设连杆是均质的且为各向同性,Watt-II连杆的总质量MWatt可估算为
(3)
式中,ρ为连杆的等效线密度(常量);
(4)
式中,LAD、LBF和LFG分别是链路AD、BF和FG的长度;
随后,第二个目标的无量纲目标函数定义如下:
(5)
式中,MCabin = 634 kg为舱体质量,引入该质量对Watt-II连杆机构的质量进行缩放,使得标量函数[式(5)]与其他目标函数具有可比性。
最后,对第三个目标进行准静力分析。如图6所示,通过在可展开腿式着陆机构的足垫处添加最大落地冲击载荷,确定各个连杆之间的内力。垂直施加于足垫处的冲击载荷Fadd可表示为Fadd = Fmagδ(t),其中δ(t)为标准Dirac-δ函数,Fmag为冲击幅值。在一定强度的冲击载荷Fadd下,各连杆之间的内力以合力的形式表示,得到矢量公式如下:
《图6》
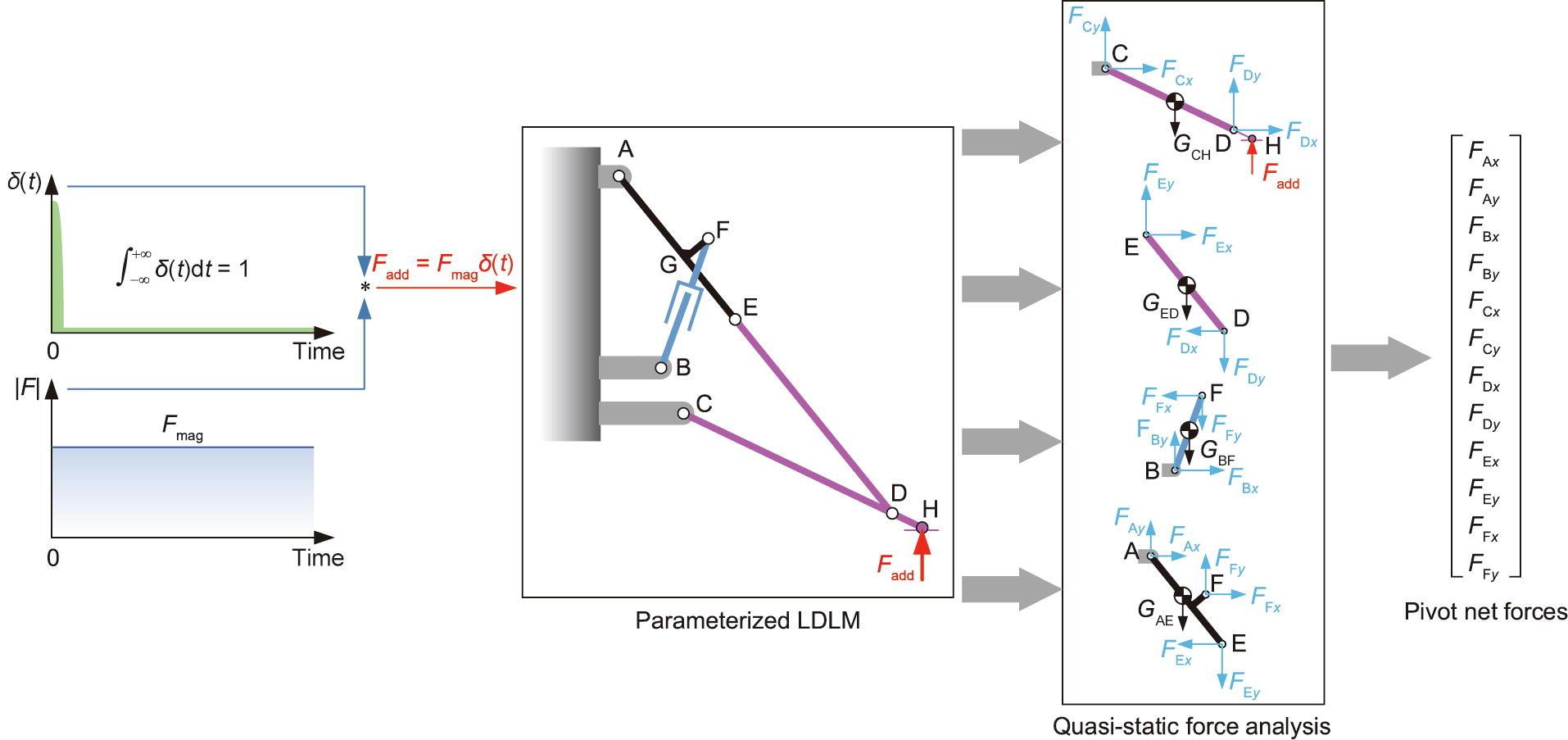
图6 一定水平冲击载荷Fadd下的可展开腿式着陆机构准静力分析示意图。
(6)
式中,
(7)
式中,vrel为运载火箭垂直着陆速度,vrel = 1.98 m·s-1(相当于自由落体高度0.20 m);MRLV和Mgnd分别为运载火箭与地面的质量;kcontact = 2.4 × 105 N·m-1为运载火箭与地面之间的等效刚度。其中,Mgnd>>MRLV满足式(7)中
(8)
最终,按舱体质量缩放的pivot最小化的第三个目标函数定义如下:
(9)
式中,g = 9.81 m·s-2为重力加速度。设计变量的非线性约束包括等式约束和不等式约束。对于前者,应保证着陆机构完全展开时的离地间隙可为发动机排气喷管提供足够的空间(运载火箭的缩比模型),可以得到
(10)
式中,
对于后一部分,提出了三类尺度约束来确定Watt-II机构。
(1)连杆长度约束。为了保持构型的可行性,需要限制Watt-II机构的连杆长度,从而得到关键连杆长度的边界范围,如表1示。
《表1》
表1 Watt-II机构关键连杆长度的边界
| Linkage | Lower bound (mm) | Upper bound (mm) |
|---|---|---|
| CD | 1500 | 2200 |
| BF | 600 | 1200 |
| GF | 0 | 50 |
| ED | 1500 | 2100 |
计算边界条件,推导得到式(11)中的非线性约束条件。
(11)
式中,
(2)连杆控制点约束。连杆控制点A~G应同时满足q8 > q7 > q9、q6 > q5 > q4和q3 > q2 > q1,可以写成以下形式:
(12)
式中,
(3)辅助角度约束。在机构完全收拢的情况下,辅助角α1、α2、α3必须为正,这样着陆机构才能顺利展开而不会发生阻塞,推导出以下约束条件。
(13)
式中,中间变量σ由附录A中Part I提供。通过组合多目标函数[式(1)、式(5)、式(9)]和非线性约束[式(11)、式(12)、式(13)],得到优化后的形式:
(14)
式中,()是由非线性不等式约束的复合矩阵,其中() = [1, 2, 3]T。
《3.1.3. 主要结果》
3.1.3. 主要结果
为了解决优化问题[式(14)],在个人计算机端 (Intel Core i7处理器,3.2 GHz,内存32 GB)使用遗传算法NSGA-II [24]来求得帕累托最优解集[25]。种群大小、帕累托影响因子和代数分别设为250、0.3和300。帕累托最优解为29的非支配解如图7所示。观察图7(a)~(c)的帕累托解集趋势,可以明显看出目标函数J1与J2、J1与J3之间的关系是矛盾的,因此应在静稳定性、轻量化和连杆内力之间进行权衡。在确定帕累托最优解集之后,需要选择最佳的解决方案以达到更好的效果。
《图7》
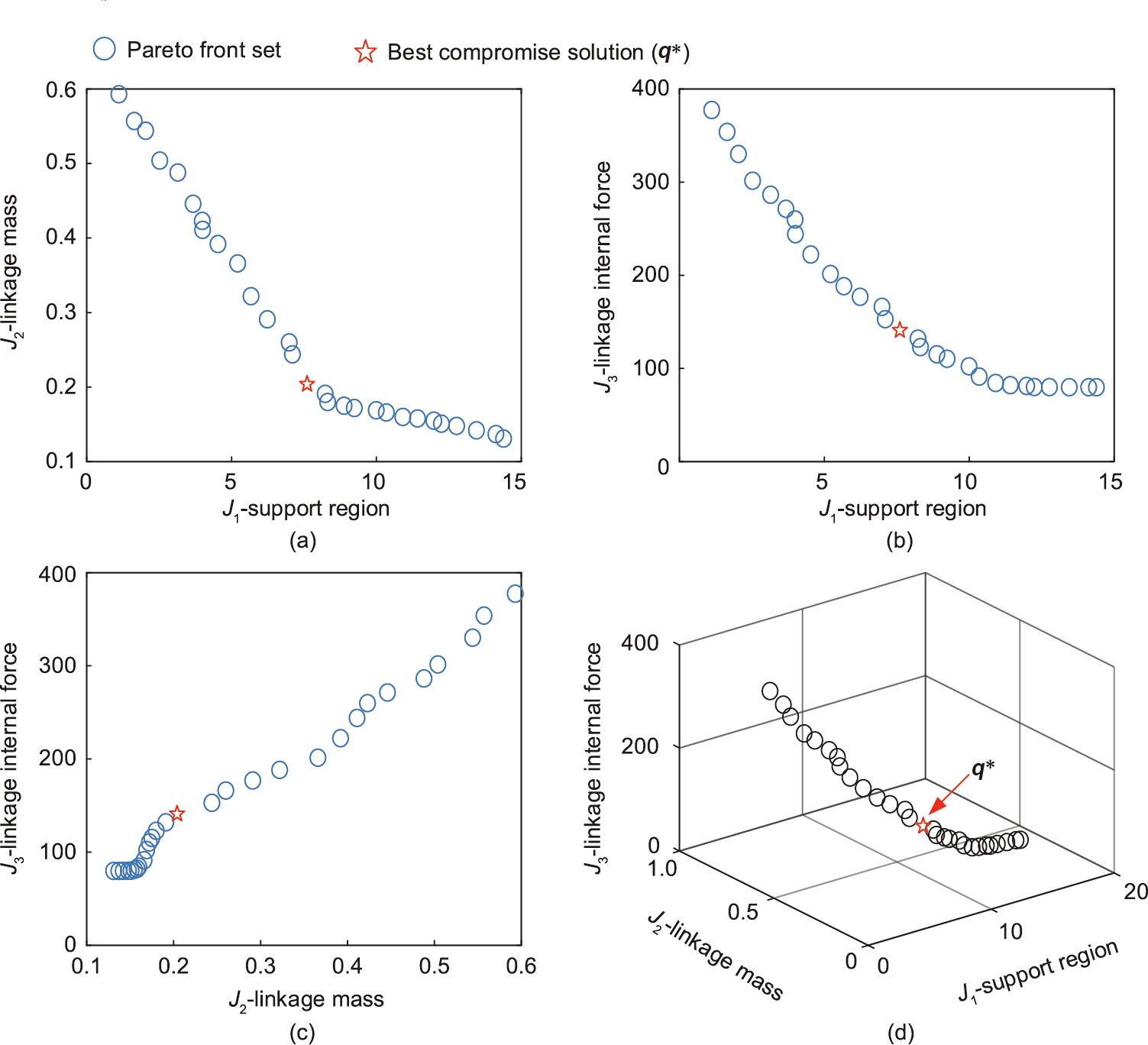
图7 基于NSGA-II在二维和三维目标空间中的帕累托最优解求解优化问题(18)。红星表示采用TOPSIS方法得到的最佳折中方案。
本文在不依赖额外专家知识的情况下,采用优劣距离法TOPSIS方法[26]找到优化问题的最佳折衷方案[式(14)]。为使解决方案更加理想,采用Shannon熵度量[27]对每个NSGA-II解决方案进行排序。最终得到了针对29个帕累托最优解的有限集的最佳折衷解*(关于排序程序的详细信息见附录A中Part II)。最后采用表2所示的最佳折衷方案*作为腿式可展开着陆机构物理设计和制造的参考长度参数。
《表2》
表2 腿式可展开着陆机构设计变量优化结果
| Design variable | Value (mm) |
|---|---|
| 1449.72 | |
| 1550.25 | |
| 2630.66 | |
| -7.54 | |
| 92.02 | |
| 1821.45 | |
| 1844.33 | |
| 2232.66 | |
| 42.87 |
《3.2 重力控制展开的布置方案》
3.2 重力控制展开的布置方案
由于着陆装置机械结构简单并且耐用,气动驱动系统可从完全收拢位置触发着陆机构,如第2.2节所述。4个气缸(AirTAC SC-50-200-S)通过流量控制阀(AirTAC PSL802A)进行控制,并通过统一的同步命令启动电磁阀(AirTAC 4V2108B),如图8所示。在实际展开过程中,输入空气压力设置为0.6 MPa,以保证每个气缸运动同步,从而推动每个展开机构以0.5 m·s-1的爆破速度从初始定位锁中释放。此外,单个气动触发系统在初始推动每个腿式可展开着陆机构时的功耗约为753.98 W。在释放初始定位锁后,着陆机构由于受到重力的影响立刻进入展开状态。此外,在完全收拢的构型下,着陆机构的质心位于主轴C的前外侧,因此在随后的动作中会发生轻微的偏转以促使机构更好地展开。
《图8》

图8 气动触发系统示意图。
《3.3 多级蜂窝缓冲器》
3.3 多级蜂窝缓冲器
设计缓冲器的关键问题在于如何在压缩腔内使用理想的结构或变形材料吸收足够的能量。为此,本方案采用多级铝蜂窝芯压溃缓冲器。缓冲器的基本组成如图9所示,其中展示了定制蜂窝芯的具体细节。位于一级蜂窝芯和二级蜂窝芯之间的隔板将内腔分成不相连的两部分,从而在压缩一级蜂窝芯的同时为二级蜂窝芯提供平滑的挤压。寻找最恶劣的着陆条件对于缓冲器的设计至关重要,考虑在最恶劣着陆条件下单腿着地吸收冲击,结合着陆时刻系统的动能和缓冲器长度缩短引起的运载火箭质心位置变化所产生的重力势能,可以得到总体能量(OE)的最大估值:
(15)
式中,EOE = 1.8 × 103 J为单腿在最恶劣着陆条件下所吸收能量的最大估计值;MRLV = 1.12 × 103 kg为运载火箭的总质量;vrel = 1.98 m·s-1为运载火箭的质心着陆速度(相当于自由落体高度0.2 m);ΔHcomp = 132 mm为缓冲器长度缩短导致运载火箭的质心允许下降的最大高度;μ为单腿吸收能量的比例因子,μ = 0.5表示50%的EOE应被先接触地面的单腿缓冲器吸收。
《图9》
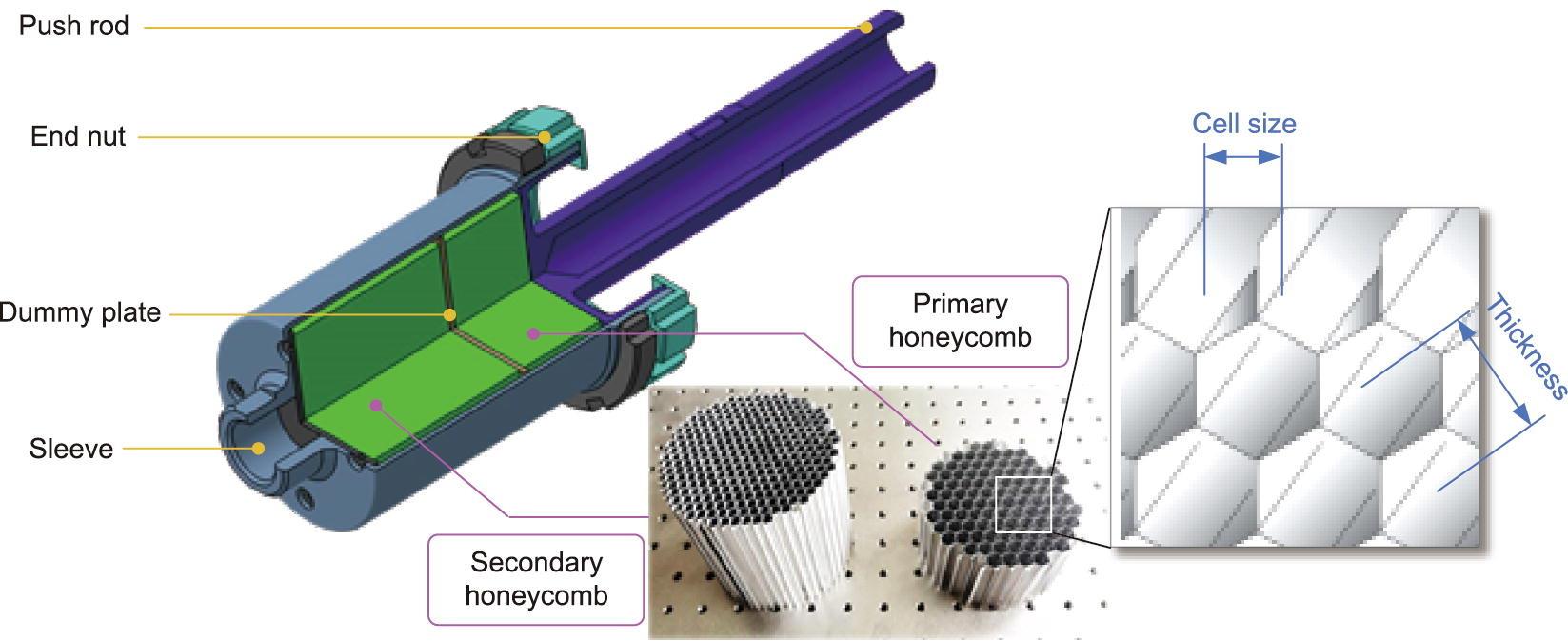
图9 多级铝蜂窝芯缓冲单元结构。
为了满足EOE的能量吸收要求并使着陆期间运载火箭的质心峰值加速度平稳衰减,本文设计了一级和二级蜂窝芯的参数,如表3示。此外,为了分析所使用的材料在缓冲器中的力学性能,进行了相关模拟实验,结果如图10所示。在模拟过程中,采用ANSYS/LS-DYNA软件对规定的铝六角蜂窝进行有限元分析。在物理实验中,定制的蜂窝试样放置在INSTRON 5969测试系统上进行裸压和稳定压缩测试。
《表3》
表3 多级铝蜂窝芯参数规格
| Stage category | Length (mm) | Diameter of section (mm) | Cell size (mm) | Sheet thickness (mm) |
|---|---|---|---|---|
| Primary honeycomb | 72 | 98 | 8.66 | 0.07 |
| Secondary honeycomb | 125 | 98 | 5.20 | 0.06 |
《图10》
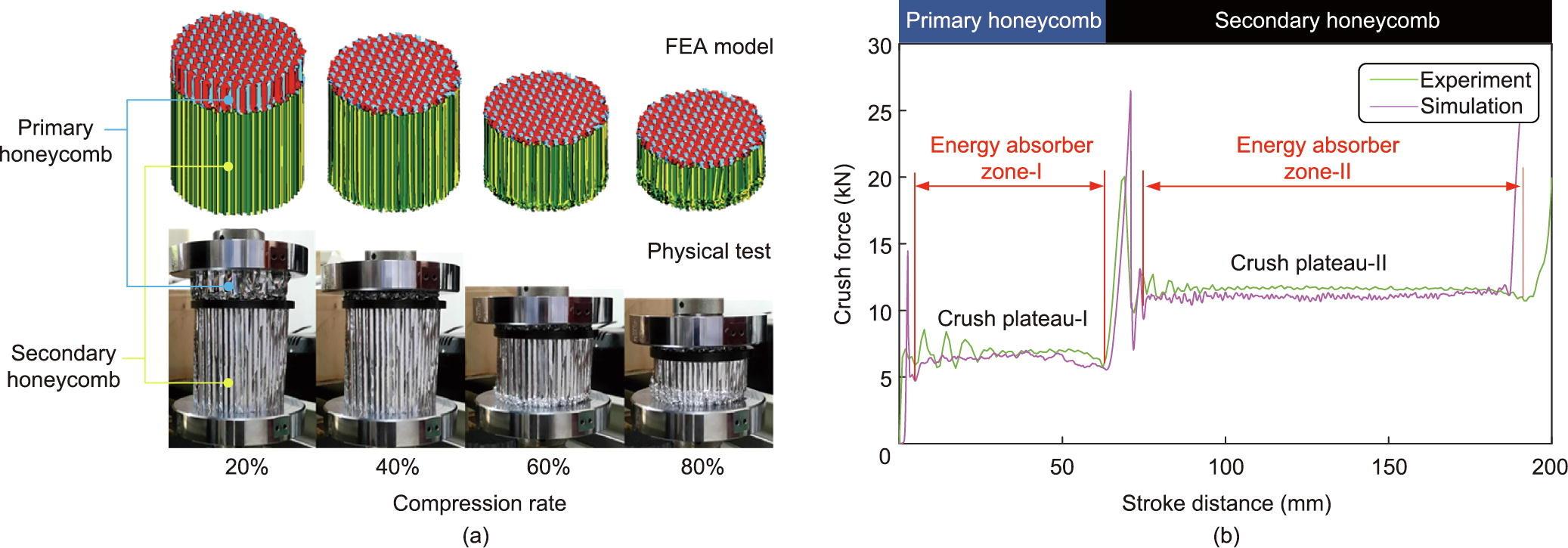
图10 多级铝蜂窝芯的实验和有限元模拟结果。
在有限元分析和实验结果中,蜂窝的变形规律相似,如图10(a)所示。对比图10(b)仿真结果和实验结果,可以看出冲程-压力曲线有着相似的趋势。一级蜂窝和二级蜂窝的力都较为平稳,这为缓冲器提供了稳定、平稳的反作用力。在物理试验中,一级和二级蜂窝的压力大小分别为(6.38 ± 0.35) kN和(10.90 ± 0.15) kN。根据吸能区划分,多级蜂窝芯的有效吸能大于1822 J,说明在最恶劣着陆条件下,缓冲器可以满足吸能要求。此外,可以在图10(b)中观察到一级蜂窝和二级蜂窝在弹性变形初始阶段都出现了峰值,为防止冲击效应加剧,应将其消除。在实际操作中,所有蜂窝试件在安装到缓冲器套筒之前都进行了预压缩处理,目的是改善其力学性能。
《4、 实验和结果》
4、 实验和结果
《4.1 实验设置》
4.1 实验设置
实验环境布置如图11所示。为了验证可重复使用运载火箭腿式可展开着陆机构的功能和性能,使用多传感器采集进行着陆机构的展开和软着陆试验。实验中采用的传感器的详细信息如表4所示。使用计算机结合辅助DAQ系统控制释放器触发、系统监控和传感器采样任务。
《图11》

图11 带有关键传感器的可重复使用运载火箭样机实验设置。
《表4》
表4 实验中采用的传感器
| Sensor category | Vendor/type | Mounted position | Measurand | Test Occupation |
|---|---|---|---|---|
| IMU | Xsens (Germany)/MTi-G-710 | Cabin body | Cabin posture | Deploying |
| Accelerometer | ChengTech (China)/CT1010S | Footpad and cabin | Acceleration of footpad and cabin | Soft landing |
| Load cell | Customized | SA | Crush force of SA | Soft landing |
| Distance sensor | Panasonic (Japan)/HG-C1200 | SA | Compression of SA | Soft landing |
| Encoder | BOCHEN (China)/BC58T12 | Pivot A of LDLM | Deploying angle of LDLM | Deploying |
《4.2 展开测试》
4.2 展开测试
在运载火箭垂直悬挂、着陆机构完全收拢、初始锁闭合条件下,各着陆腿同时由气缸触发,着陆机构开始执行展开动作,动态图片如图12所示。4个着陆腿在从初始锁释放后成功展开,当各个支腿到达底部极限位置时,每个着陆腿的锁定机构完全接合,参见图3,从而为可展开机构的结构强度和稳定着陆提供可靠的支持。
《图12》
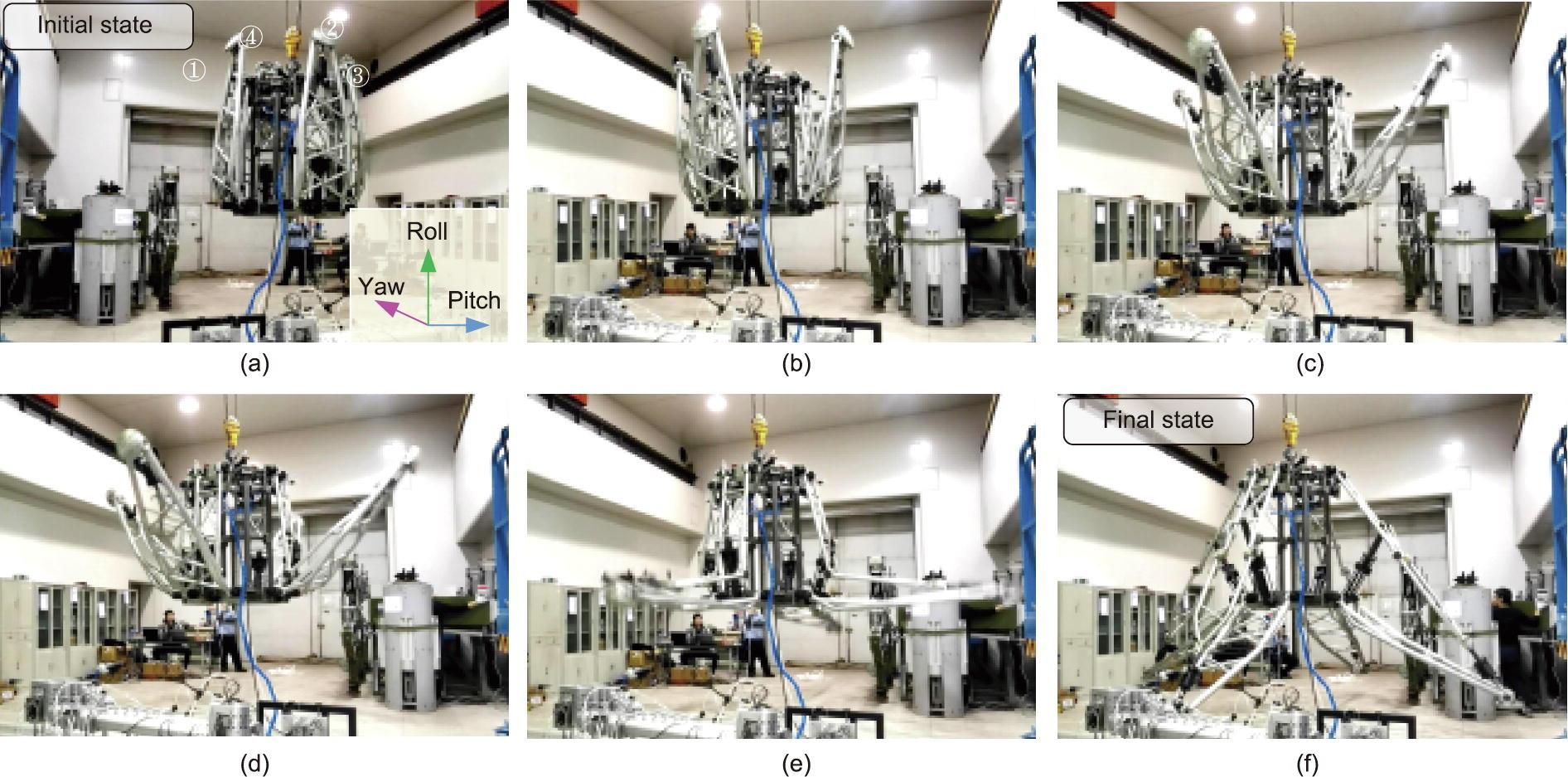
图12 静态悬挂的着陆机构展开过程图片。初始状态和最终状态分别用蓝色和黄色突出显示。(a)中的数字为相应着陆腿的标签,插图表明了舱体的朝向。
为了进一步研究腿式可展开着陆机构的展开性能,图13(a)绘制了4个着陆腿支点的运动来表示各支腿的实际展开过程。展开所需时间大致小于1.5 s。4种受重力作用的着陆腿在展开阶段表现出同步运动的效果。通过观察每个着陆腿的峰值行程[图13(a)中局部视图],各支腿完全展开状态的最大时间延迟为0.052 s,发生在曲线LDLM1和LDLM3之间。不完全同步的主要原因是由于制造和装配误差,各个着陆腿之间存在一定的动态特性差异,而这些差异在展开过程中不能由着陆腿本身的重力进行自我调整。通过进一步引入半主动控制来操纵每个支腿的运动并补偿动态特性的不一致,可以改善这种现象。
《图13》
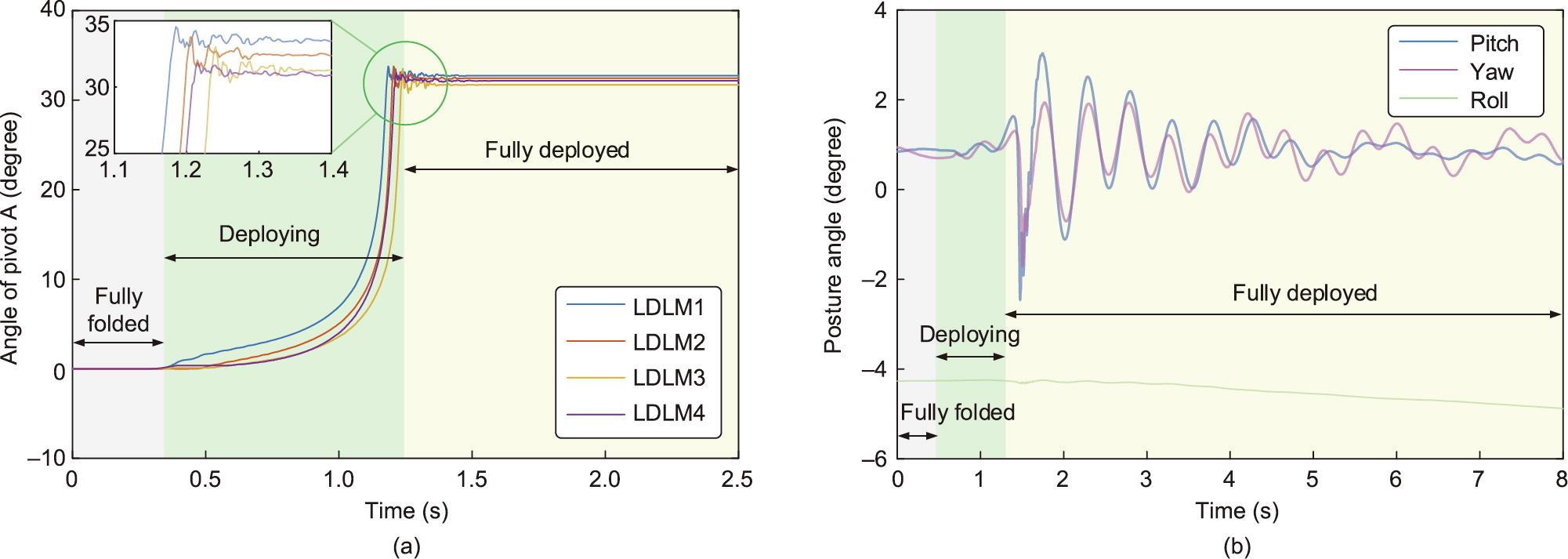
图13 着陆机构展开试验结果。(a)铰链A的关节角。(b)舱体姿态角。完全收拢、展开过程和完全展开的区域分别以灰色、绿色和黄色突出显示。
图13(b)还显示了展开试验时舱体的姿态角度。根据惯性测量单元(IMU)的记录数据,在采样率为500 Hz时,展开阶段俯仰角和横摆角的最大波动值分别为0.46°和0.55°;在整个测试过程中,它们分别达到了5.72°和3.94°。在达到完全展开状态后,姿态角的增加是由悬挂点的摆动引起,随着运载火箭恢复稳定,这种角度的增加逐渐减弱。因此,本文所设计的着陆机构具有高展开/折叠比和着陆支撑区域大的优点,其展开运动平稳,且不会对舱体本身产生明显的姿态扰动,这有利于真实运载火箭在接近着陆时的姿态控制。
《4.3 软着陆测试》
4.3 软着陆测试
在测试中,通过无线释放器连接的运载火箭机体垂直悬挂,离地间隙为200 mm(相当于着陆速度为1.98 m·s-1)。当无线指令触发释放时,箭体经历自由落体,软着陆的图片如图14所示。试验中,加速度计分别布置在足垫、舱底部位、几何中心(GC)和顶部,同步测量箭体的过载加速度。加速度计传感器会全程测量着陆撞击所经历的整个过程。如图15(a)所示,当箭体触地时,足垫处的着陆冲击接近75.20g。但是经过各个缓冲器的缓冲后,舱体底部和GC的峰值分别急剧下降到14.51g(142.34 m·s-2)和9.38g(92.02 m·s-2)。这表明,设计的多级铝蜂窝芯缓冲器有效地吸收了冲击能量,为运载火箭的着陆提供了安全保障。
《图14》
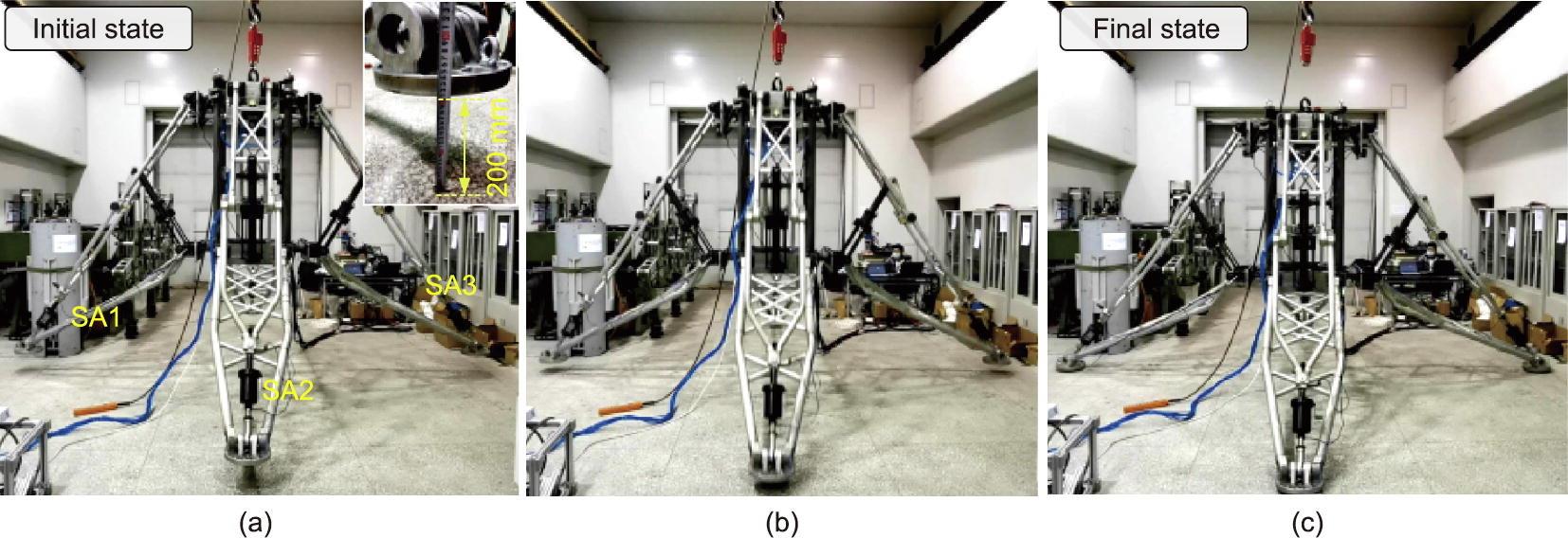
图14 箭体软着陆过程图片。插图显示离地间隙(200 mm)。(a)中的数字为缓冲器对应的标签。
《图15》
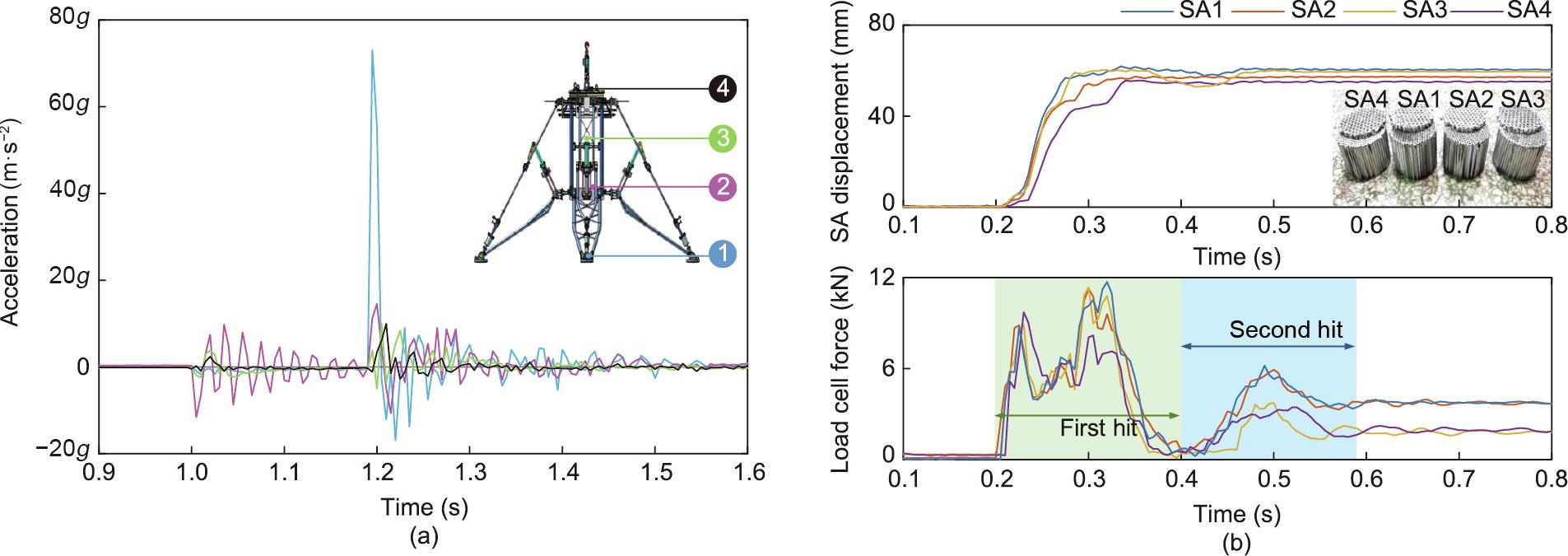
图15 多级铝蜂窝芯运载火箭软着陆试验结果。(a)通过箭体上的分布式加速度计测量的过载加速度。(b)整个测试过程中4条腿的缓冲位移和压力数据。插图为着陆后的蜂窝压溃图。第一次接触和反弹对应的区域分别用绿色和蓝色表示。
根据激光位移传感器和压力传感器的采样数据,4个着陆腿的缓冲器位移和挤压力如图15(b)所示。缓冲器1、缓冲器2和缓冲器3也有类似的平稳期,这与3.3节中提到的力学性能一致。此外,还可以从缓冲器的位移看出四腿的着陆顺序。然而缓冲器4在I阶段保持稳定,而不像缓冲器1至缓冲器3那样经历双稳定阶段,这意味着缓冲器4在进入II阶段稳定之前,主要能量被前着陆腿吸收。此外,还可以观察到4条着陆腿的第二次撞击都能够吸收剩余的冲击(大约占着陆时总能量的21%)。图16表示了预压缩量分别为4.68 mm(原厚度的6.5%)和6.25 mm(原厚度的5%)的一级和二级单个蜂窝芯的变形结果。由此可见,多级蜂窝方案利用一级蜂窝较低的力稳定期迅速抑制了着陆初期的冲击,随后利用一级蜂窝和二级蜂窝同时吸收了大量的着陆能量。实验结果证明所设计的缓冲器可以为运载火箭在着陆时提供足够的缓冲性能。
《图16》
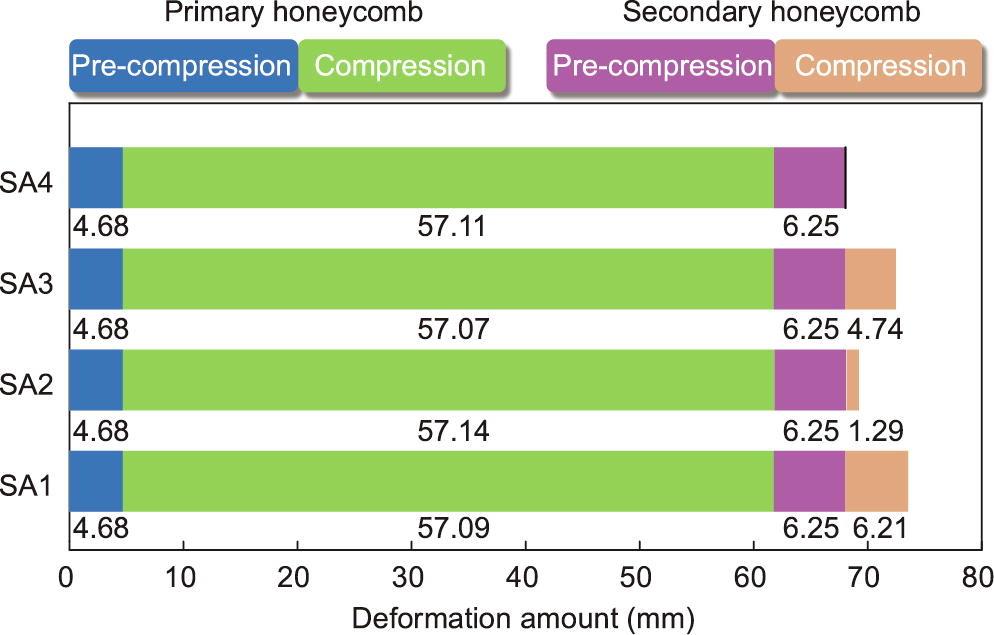
图16 软着陆试验中单个蜂窝芯的变形程度。预压缩处理分别应用于每个缓冲器的一级和二级蜂窝。
《5、 讨论》
5、 讨论
实验结果表明,所研制的着陆装置能够快速平稳地展开,姿态波动较小,可以有效地减小着陆冲击。这是独特的着陆机构与提出的基于重力控制的展开方案和多级蜂窝式缓冲器相结合的结果。与现有采用伸缩式(猎鹰-9,Falcon-9)和平行式(新谢泼德,New Shepard)支撑机构相比,所研制的着陆装置最显著的特点是优化的Watt-II型六杆机构具有着陆支撑区域大、轻量化、连杆内力合理等优点。此外,所提出的着陆装置展开方案具有双重优点。首先不需要使用高压氦资源,只需要轻微的气动初始推动就可以触发展开。其次不需要使用全范围液压或气动驱动,而是通过重力的作用被动展开,使得展开过程更加顺利。
然而,还需要进行大量的研究来进一步提高所提出的着陆装置的性能和实用性,以实现该机构在全尺寸运载火箭上的应用。首先需要考虑所开发的规模化着陆装置样机与全尺寸原型之间的性能一致性问题。优化后的Watt-II在结构上比现有的伸缩并联机构更复杂。这种现象将在全尺寸原型起落架的质量/惯性规格中得到反映和放大,预计将使用具有良好力学性能的轻质高强度材料来制造起落架。但是考虑在制造过程中使用的各种材料可能违反了式(3)中的均质假设,因此可以使用线性密度加权的连杆长度累积来改变质量估计Mwatt,以更新原始优化范式。此外,在应用于全尺寸运载火箭时,由于尺度效应和舱体状态差异,第4.2节测量的舱体静态悬挂的展开时间可能会发生变化。
其次,基于重力控制展开的成功实施依赖于所设计的着陆装置中各个铰链节点的可重复展开平滑度。旋转/移动关节的任何卡滞或阻动都将直接影响其展开过程,甚至导致失效。对于所选择的具有多个铰链关节的Watt-II型六杆机构,这种非光滑行为更有可能出现在移动关节中,尤其在应用于全尺寸原型时,如图2(b)中所设计的锁定机构所采用的圆柱型运动副。从实际应用的角度来看,自润滑减摩材料和热保护装置是制造旋转接头的一种潜在解决方案,以提高着陆装置展开动作的平稳性和可靠性。此外,在空间允许的情况下,可将带有径向辅助支撑的轻型滑动机构集成到伸缩锁紧机构中,以提高圆柱型运动副的抗弯强度和轴向导向性能。
再次,所开发的起落架在重力控制展开时是被动的,这是4个可展开腿式着陆机构不能严格同步的内在限制。由于缺少机械系统和控制方法上的协调工具,在这种情况下无法克服和补偿由初始气动推动和单个可展开支撑机构的动力学差异引起的异步。这个问题可以通过以下方法缓解:在机械层面,可以将小型的同步耦合器安装在舱内,被动协调4个可展开腿式着陆机构的展开过程。在控制层面,可以采用半主动可调阻尼器同步控制策略实现可展开腿式着陆机构的闭环展开控制。
最后,应进一步提高腿式可展开着陆机构的可靠性和可维护性,并将该机构用于全尺寸可重复使用运载火箭原型。尽管展开和缓冲在内的关键性能已经得到实验验证,但未来研究还需要考虑磨损、腐蚀、疲劳和机构损坏。必须提供对关键故障模式、不可靠原因以及可回收性系统评估,以揭示所提出的腿式可展开支撑机构在未来应用中的适用性限制。
《6、 结论和未来的工作》
6、 结论和未来的工作
本文提出了一种新型可展开腿式着陆机构。以Watt-II型六杆机构为基本构型,采用着陆支撑区域、轻量化和连杆机构内力等多目标优化设计支撑机构。此外,研制了具有重力控制展开、双备份锁定、多级缓冲等功能的缩比样机并进行实验验证。实验结果表明:设计的可展开腿式着陆机构在0.2 m自由落体着陆试验中能够实现快速平稳的展开(持续时间小于1.5 s,姿态波动小于6°),同时具有良好的着陆冲击衰减效果,加速度峰值小于10g。在未来的研究中,现有的优化方法将从平面机构扩展到空间机构,提供多种具有更佳内在性能的可展开机构构型。此外,将重点研究主动展开控制以产生同步展开动作,从而最大程度地减少对可重复使用运载火箭姿态稳定性的动量扰动。最后,对所提出的可展开腿式着陆机构的可靠性和可维护性进行系统评估和改进,以提高该机构在未来可重复使用运载火箭中的适用性。











 京公网安备 11010502051620号
京公网安备 11010502051620号




