当谷歌于2010年推出其自动驾驶原型车时,其车顶上安装的重达13 kg的旋转式圆柱形光探测和测距(LiDAR)传感器引来大批评论,包括部分嘲讽之声[1‒2]。甚至连谷歌的自动驾驶汽车开发项目负责人也玩笑似地说这些设备形似肯德基快餐连锁店用来装炸鸡的桶[3]。但这些传感器也是车上最昂贵的部件,单个售价达75 000美元[1]。除了不够美观外,受尺寸、成本和其他条件所限,这些装置并不适用于消费型汽车(图1),更别提应用于手机和安全设备等可能使用激光雷达的产品[3]。
《图1》
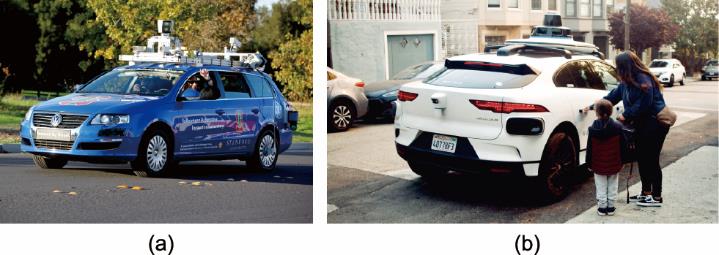
图1 美国加利福尼亚州帕洛阿尔托市斯坦福大学推出的大众自动驾驶原型车(a),和谷歌自动驾驶汽车独立子公司Waymo(美国加利福尼亚州山景城)推出的机器人出租车(b),它们的特点在于车顶安装了大型激光雷达装置,以帮助车辆探知周围环境并进行导航。来源:(a)网络相册(Flickr)(CC BY 2.0);(b)Waymo(公共领域)。
但在此后的短短十年间,激光雷达设备从体积到成本均大幅缩减。这些轻巧便宜的设备足以设置在某些消费电子产品中,如苹果公司的iPhone手机[4]。部分国家的消费者也可购买安装了隐蔽式激光雷达设备的汽车,少数制造商已开始出售采用该技术的量产车型,例如中国小鹏汽车公司和美国Lucid Motors电动汽车公司[5‒6]。作为老牌汽车制造商,通用汽车公司和沃尔沃汽车公司将在接下来的一年销售配备了激光雷达的自研汽车[7‒8]。
许多现有激光雷达设备将必要的光发射和检测组件集成至一个计算机芯片,从而大大缩减体积和成本——尽管业内对其中哪一个设备(如果有)符合固态标准的意见大相径庭[9]。这些激光雷达设备并非旋转激光阵列,而是采用多种其他策略绘制周围环境地图,包括微镜和微振液晶。这些策略的优劣之争逐渐升级,目前仍未能确认其中最有效的策略。美国加利福尼亚州立大学伯克利分校的电气工程和计算机科学系教授Ming Wu表示,寻找将所有激光雷达组件集成到单颗芯片的最佳方法是“一项有巨大挑战性的研究,也是行业的‘圣杯’”。
激光雷达设备通常每秒钟发射数百万激光脉冲,激光脉冲被设备周围的物体(如行人、骑自行车的人、其他汽车、路面、建筑物和树林等)即时反射回来[10]。随后,传感器将检测反射,并据此建立“点云”,即一种连续刷新的环境三维重建方法(图2)[11]。自动驾驶车辆通常还依赖雷达和摄像头等其他传感器。但激光雷达更具吸引力,因为它能提供高空间分辨率并且能够测量与物体之间的距离和物体的速度,甚至在最恶劣的天气下依然能正常工作[12]。几乎所有研发自动驾驶汽车的公司都接受了激光雷达,而特斯拉成了格格不入的抵制者——其首席执行官埃隆·马斯克曾将激光雷达称为“徒劳无益的差事”[12]。
《图2》
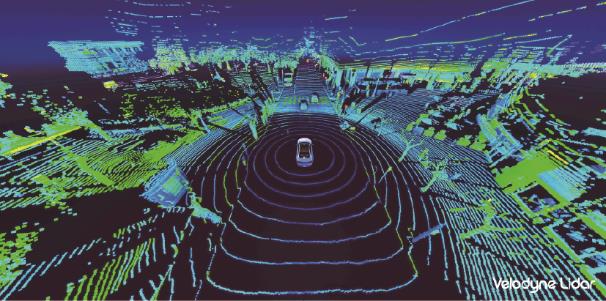
图2 如图所示,当自动驾驶汽车行驶时,其激光雷达系统会为周围环境创建一个持续更新的三维地图,即“点云”。来源:Velodyne LiDAR(公有领域)。
激光雷达的功能使其同样能应用于其他各类设备,包括无人机、仓储和配送机器人、追踪机场乘客数量的人群管理系统、安全监控和警用测速枪等。iPhone手机中的激光雷达可帮助摄像头对焦,提高对焦标尺的精度,并允许增强现实,以便用户将虚拟信息和物体(如游戏角色、商店的商品价格或家具)叠加到现实环境中[4]。
与标准旋转式激光雷达相比,片上激光雷达设备具备多种优势[11]。例如,人们对自动驾驶汽车车顶激光雷达装置的主要关注点之一在于:如车辆需在崎岖路段行驶十年乃至更长时间,其活动部件是否耐用[11]。很多片上激光雷达设备并未采用可能断裂或磨损的活动部件,因而提高了耐用性[9]。Wu表示,因为片上设备采用与计算机芯片相同的互补金属氧化物半导体(CMOS)技术,所以半导体代工厂有可能以低成本生产海量片上设备,使其得到广泛应用。
但理想的基于芯片的激光雷达汽车设备必须满足严苛的要求,它需要从200 m外仅依靠10%的反射率就能探测到物体,提供至少120° × 20°的视场以及0.1°的角分辨率[9]。此外,每套装置的理想成本应当约为100美元。为满足上述性能和成本标准,十多家公司和大量学术研究人员采取了多种方法来研发和改进片上激光雷达设备[13]。
工程师们必须解决的问题之一在于如何扫描周围环境以识别潜在危险。安装于车顶的旋转式激光雷达设备可能不够美观,但能轻易满足该功能[14],并能360°全景拍摄车辆环境。但Wu表示,扫描对于片上设备而言“是最困难的事”。在采用了所谓的微机电系统(MEMS)的设计中,可通过调整微镜的角度使激光扫过视场[11]。押注这一策略的公司包括初创公司Blickfeld(德国慕尼黑)和Innoviz(以色列),后者与大众汽车公司签订了合同[15‒16]。但MEMS技术受到了抨击,因其使用了可能经不起频繁使用的活动部件[17]。
另一种扫描策略采用具有多排天线的光学相控阵,其中每个天线发射具有特定相位的激光脉冲[11]。不同天线发出的脉冲合成相干波束。如需改变波束方向,这种设备可改变某些天线产生的激光相位,从而产生干扰。干扰的相消性和相长性将决定波束的指向。“这项技术的优点在于通过电子的方式改变相移以控制方向,从而避免使用机械运动部件。”美国加利福尼亚州洛杉矶南加州大学的电气和计算机工程系教授Hossein Hashemi说。
Hashemi和他的同事根据该方案研发了数个原型设备,包括一种包含1024个天线的一维扫描设备,该设备可集成于5.7 mm × 6.4 mm的芯片[18]。包括Wu及其同事在内的其他研究人员也对该方案开展了研究[19]。但Hashemi表示这项技术面临着巨大的障碍。阵列中的元件需要相隔半个波长,对于激光雷达而言,即0.5~0.75 m。“你需要把所有必要的组件统统塞进这样狭小的空间。”他认为这会限制设备的分辨率[20]。
2022年,Wu及其同事描述了另一类片上激光雷达,这是一种类似于数码相机传感器的焦平面开关设备[20‒21]。芯片上有16 384个像素,其中每一个都包含一个激光发射天线,天线发射的激光穿过透镜,透镜将激光导向目标。这些天线也能感知周围物体反射的激光。该设备通过将激光导向特定的天线模式来移动扫描波束。该团队在试验中将激光雷达设备集成至10 mm × 11 mm的芯片,实现了70°的水平视场以及10 m外1.7 cm的距离分辨率[20‒21]。Wu表示这种焦平面开关激光雷达设备迄今尚未投入生产,但他已和同事成立了一家衍生公司并打算将这种芯片商业化。
对于各公司和研究人员正在推行的扫描策略而言,以上策略只是九牛一毛。如何扫描环境只是工程师们在设计片上激光雷达设备时必须考虑的方面之一。另一方面是如何确定该环境中与物体之间的距离。大多数激光雷达设备使用飞行时间传感器测量激光脉冲反弹时间[14]。但调频连续波设备通过比较原始波束和返回波束的频率计算距离[22]。激光雷达设计的其他方面也有所不同,包括其使用的激光类型[14]。
总部位于英国剑桥的技术和产品研发公司The Technology Partnership的顾问Alex Coney表示,虽然部分专家预测行业会出现重大变革,部分现有制造商会因此消失[23],但已上市的产品表明片上激光雷达“显然正在成熟,但还有待提升”。
他认为成本是该行业需要改进的关键领域之一。各公司通常对其激光雷达设备的价格讳莫如深,但总部位于美国加利福尼亚州圣何塞的激光雷达开发商Luminar透露,它为2022年上市的沃尔沃新车型制造的传感器价格为500~1000美元,远高于其在车辆系统中的目标价格(100美元)[24]。因为高端产品的买家们愿意承担这笔费用,所以苹果为其iPhone手机配备了激光雷达[25]。但在2021年,苹果的竞争对手三星以成本高昂且消费者对此不感兴趣为由宣布不再生产配置激光雷达的手机[25]。但Wu表示,他希望该成本会随着企业大规模生产半导体形成的固有效率优势而下降。











 京公网安备 11010502051620号
京公网安备 11010502051620号




