
2020, Volume 6, Issue 8
Engineering >> 2020, Volume 6, Issue 8 doi: 10.1016/j.eng.2019.09.001
Precise Orbit Determination for the FY-3C Satellite Using Onboard BDS and GPS Observations from 2013, 2015, and 2017
a School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China
b German Research Centre for Geosciences (GFZ), Potsdam 14473, Germany
c National Space Science Center, Chinese Academy of Sciences, Beijing 100190, China
d Beijing Key Laboratory of Space Environment Exploration, Beijing 100190, China
Next Previous
Abstract
Using the FengYun-3C (FY-3C) onboard BeiDou Navigation Satellite System (BDS) and Global Positioning System (GPS) data from 2013 to 2017, this study investigates the performance and contribution of BDS to precise orbit determination (POD) for a low-Earth orbit (LEO). The overlap comparison result indicates that code bias correction of BDS can improve the POD accuracy by 12.4%. The multi-year averaged one-dimensional (1D) root mean square (RMS) of the overlapping orbit differences (OODs) for the GPS-only solution is 2.0, 1.7, and 1.5 cm, respectively, during the 2013, 2015, and 2017 periods. The 1D RMS for the BDS-only solution is 150.9, 115.0, and 47.4 cm, respectively, during the 2013, 2015, and 2017 periods, which is much worse than the GPS-only solution due to the regional system of BDS and the few BDS channels of the FY-3C receiver. For the BDS and GPS combined solution (also known as the GC combined solution), the averaged 1D RMS is 2.5, 2.3, and 1.6 cm, respectively, in 2013, 2015, and 2017, while the GC combined POD presents a significant accuracy improvement after the exclusion of geostationary Earth orbit (GEO) satellites. The main reason for the improvement seen after this exclusion is the unfavorable satellite tracking geometry and poor orbit accuracy of GEO satellites. The accuracy of BDS-only and GC combined solutions have gradually improved from 2013 to 2017, thanks to improvements in the accuracy of International GNSS Service (IGS) orbit and clock products in recent years, especially the availability of a high-frequency satellite clock product (30 s sampling interval) since 2015. Moreover, the GC POD (without GEO) was able to achieve slightly better accuracy than the GPS-only POD in 2017, indicating that the fusion of BDS and GPS observations can improve the accuracy of LEO POD. GC combined POD can significantly improve the reliability of LEO POD, simply due to system redundancy. An increased contribution of BDS to LEO POD can be expected with the launch of more BDS satellites and with further improvements in the accuracy of BDS satellite products in the near future.
Keywords
Fengyun-3C ; LEO precise orbit determination ; Onboard BDS and GPS ; BDS code bias ; BDS/GPS combined POD
Figures
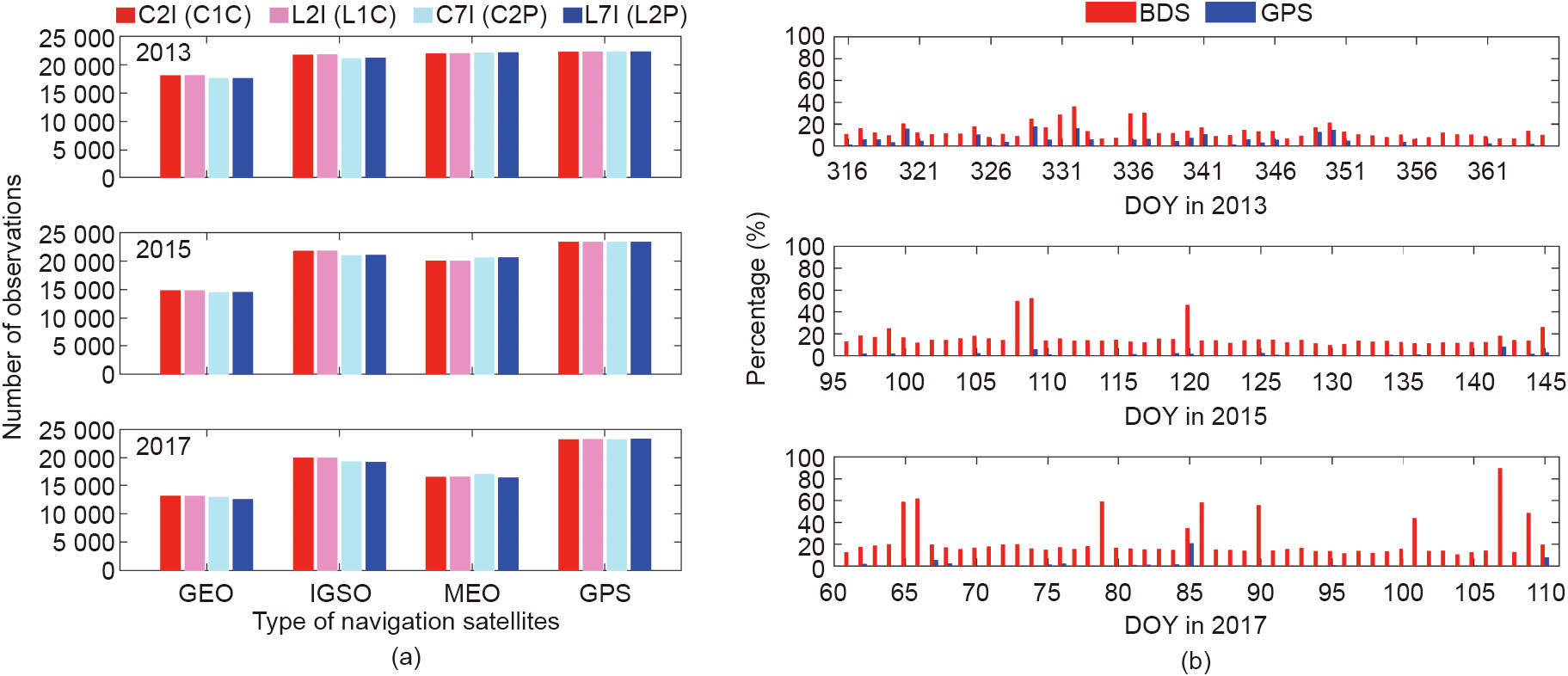
Fig. 1

Fig. 2

Fig. 3
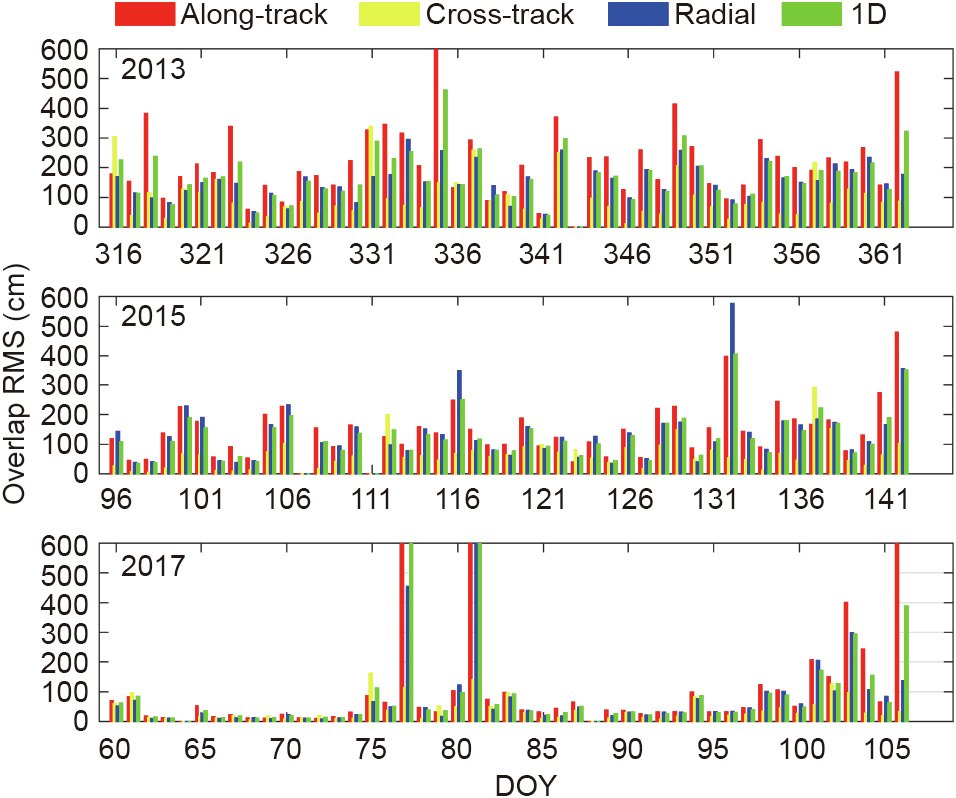
Fig. 4

Fig. 5
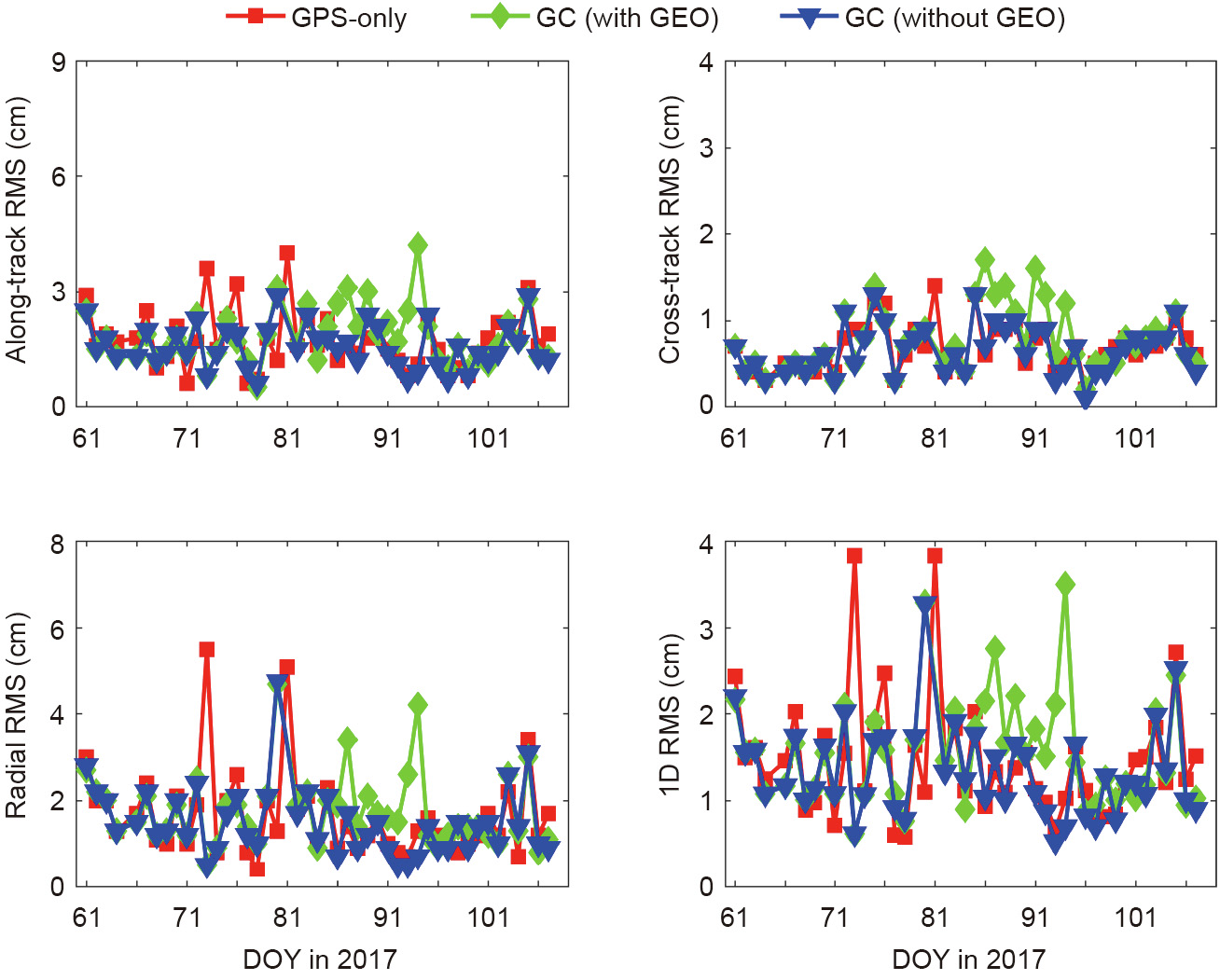
Fig. 6
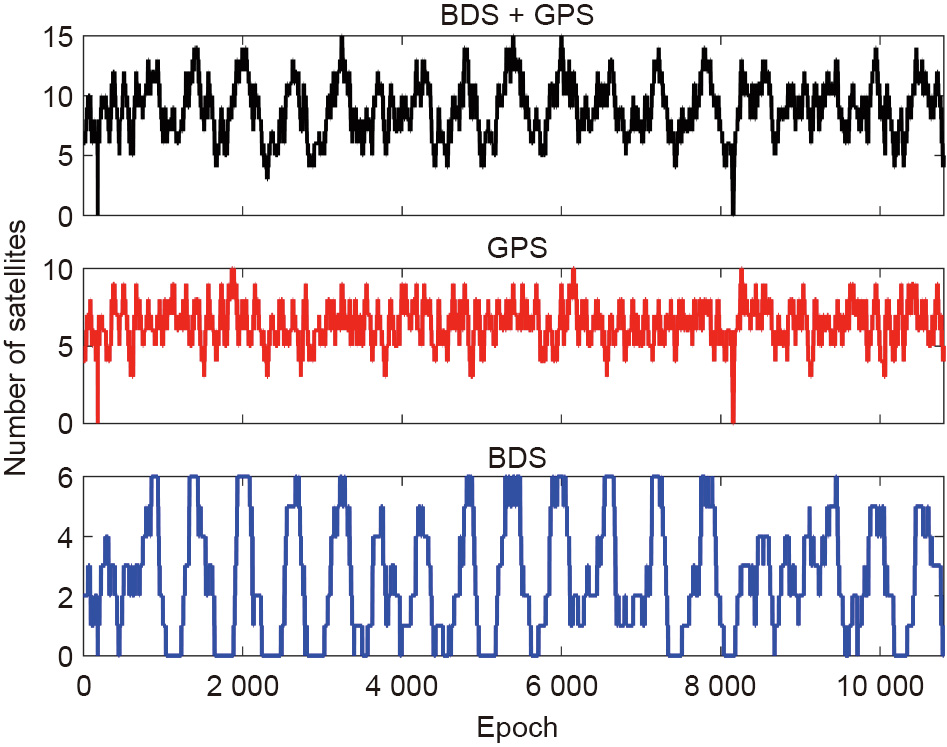
Fig. 7

Fig. 8
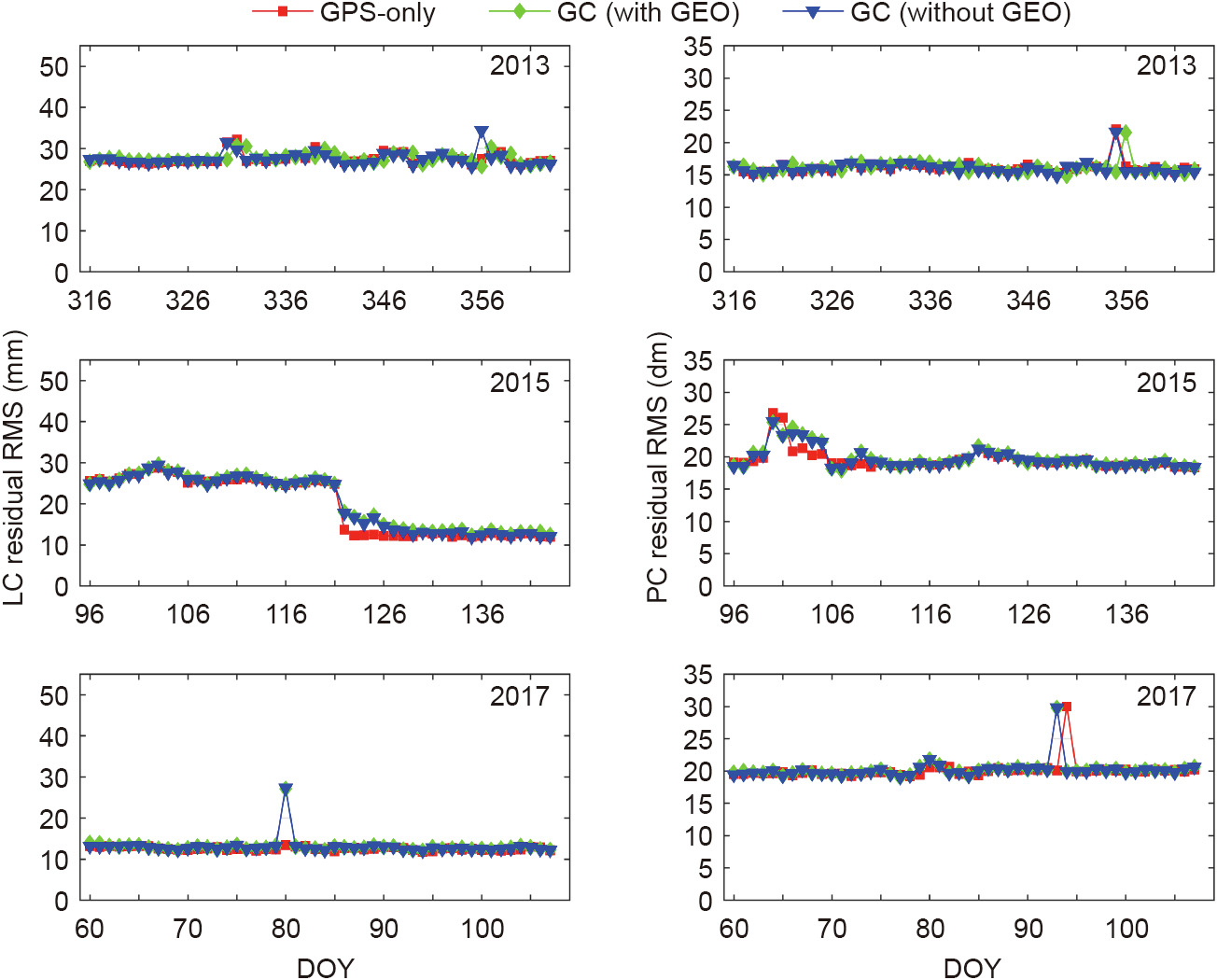
Fig. 9
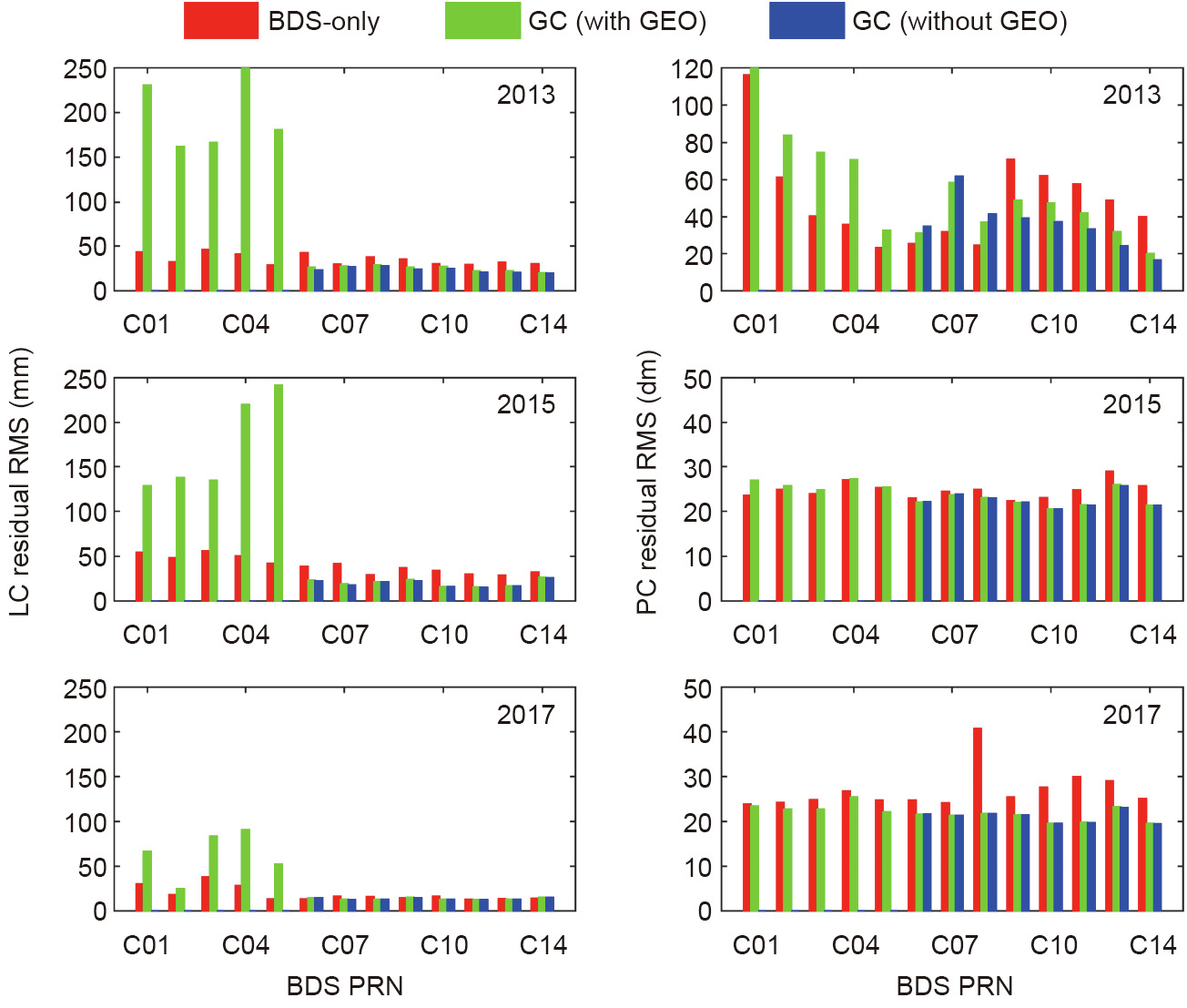
Fig. 10
References
[ 1 ] Tapley BD, Ries JC, Davis GW, Eanes RJ, Schutz BE, Shum CK, et al. Precision orbit determination for TOPEX/POSEIDON. J Geophys Res Oceans 1994;99 (C12):24383–404. link1
[ 2 ] Kang Z, Tapley B, Bettadpur S, Ries J, Nagel P, Pastor R. Precise orbit determination for the GRACE mission using only GPS data. J Geod 2006;80 (6):322–31. link1
[ 3 ] Bock H, Jäggi A, Meyer U, Visser P, van den Ijssel J, van Helleputte T, et al. GPSderived orbits for the GOCE satellite. J Geod 2011;85(11):807–18. link1
[ 4 ] van den Ijssel J, Encarnação J, Doornbos E, Visser P. Precise science orbits for the Swarm satellite constellation. Adv Space Res 2015;56(6):1042–55. link1
[ 5 ] Zhao Q, Guo J, Li M, Qu L, Hu Z, Shi C, et al. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J Geod 2013;87 (5):475–86. link1
[ 6 ] Li X, Zhang X, Ren X, Fritsche M, Wickert J, Schuh H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci Rep 2015;5:8328. link1
[ 7 ] Li P, Zhang X, Guo F. Ambiguity resolved precise point positioning with GPS and BeiDou. J Geod 2017;91(1):25–40. link1
[ 8 ] Xu A, Xu Z, Ge M, Xu X, Zhu H, Sui X. Estimating zenith tropospheric delays from BeiDou navigation satellite system observations. Sensors 2013;13 (4):4514–26. link1
[ 9 ] Li M, Li W, Shi C, Zhao Q, Su X, Qu L, et al. Assessment of precipitable water vapor derived from ground-based BeiDou observations with Precise Point Positioning approach. Adv Space Res 2015;55(1):150–62. link1
[10] Li X, Zus F, Lu C, Dick G, Ning T, Ge M, et al. Retrieving of atmospheric parameters from multi-GNSS in real time: validation with water vapor radiometer and numerical weather model. J Geophys Res Atmos 2015;120 (14):7189–204. link1
[11] Li M, Li W, Shi C, Jiang K, Guo X, Dai X, et al. Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J Geod 2017;91 (11):1313–27. link1
[12] Xiong C, Lu C, Zhu J, Ding H. Orbit determination using real tracking data from FY3C-GNOS. Adv Space Res 2017;60(3):543–56. link1
[13] Zhao Q, Wang C, Guo J, Yang G, Liao M, Ma H, et al. Enhanced orbit determination for BeiDou satellites with Fengyun-3C onboard GNSS data. GPS Solut 2017;21(3):1179–90. link1
[14] Cai Y, Bai W, Wang X, Sun Y, Du Q, Zhao D, et al. In-orbit performance of GNOS on-board FY3-C and the enhancements for FY3-D satellite. Adv Space Res 2017;60(12):2812–21. link1
[15] Dow JM, Neilan RE, Rizos C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J Geod 2009;83(3–4):191–8. link1
[16] Guo J, Xu X, Zhao Q, Liu J. Precise orbit determination for quad-constellation satellites at Wuhan University: strategy, result validation, and comparison. J Geod 2016;90(2):143–59. link1
[17] Uhlemann M, Gendt G, Ramatschi M, Deng Z. GFZ global multi-GNSS network and data processing results. In: Rizos C, Willis P, editors. IAG 150 years: Proceedings of the IAG Scientific Assembly; 2013 Sep 1–6; Postdam, Germany. Cham: Springer; 2015. p. 673–9. link1
[18] Schmid R, Dach R, Collilieux X, Jäggi A, Schmitz M, Dilssner F. Absolute IGS antenna phase center model igs08.atx: status and potential improvements. J Geod 2016;90(4):343–64. link1
[19] Rebischung P, Schmid R. IGS14/igs14.atx: a new framework for the IGS products. American Geophysical Union Fall Meeting 2016; 2016 Dec 12–16; San Francisco, CA, USA, 2016. link1
[20] Dilssner F, Springer T, Schönemann E, Enderle W. Estimation of satellite Antenna Phase Center corrections for BeiDou. International GNSS Service Workshop 2014; 2014 June 23–27; Pasadena, CA, USA, 2014. link1
[21] Berger C, Biancale R, Ill M, Barlier F. Improvement of the empirical thermospheric model DTM: DTM94—a comparative review of various temporal variations and prospects in space geodesy applications. J Geod 1998;72(3):161–78. link1
[22] Wanninger L, Beer S. BeiDou satellite-induced code pseudorange variations: diagnosis and therapy. GPS Solut 2015;19(4):639–48. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




