
2015, Volume 1, Issue 3
Engineering >> 2015, Volume 1, Issue 3 doi: 10.15302/J-ENG-2015063
A Precision-Positioning Method for a High-Acceleration Low-Load Mechanism Based on Optimal Spatial and Temporal Distribution of Inertial Energy
The Key Laboratory of Mechanical Equipment Manufacturing & Control Technology of Ministry of Education, Guangdong University of Technology, Guangzhou 510006, China
Next Previous
Abstract
High-speed and precision positioning are fundamental requirements for high-acceleration low-load mechanisms in integrated circuit (IC) packaging equipment. In this paper, we derive the transient nonlinear dynamicresponse equations of high-acceleration mechanisms, which reveal that stiffness, frequency, damping, and driving frequency are the primary factors. Therefore, we propose a new structural optimization and velocity-planning method for the precision positioning of a high-acceleration mechanism based on optimal spatial and temporal distribution of inertial energy. For structural optimization, we first reviewed the commonly flexible multibody dynamic optimization using equivalent static loads method (ESLM), and then we selected the modified ESLM for optimal spatial distribution of inertial energy; hence, not only the stiffness but also the inertia and frequency of the real modal shapes are considered. For velocity planning, we developed a new velocity-planning method based on nonlinear dynamic-response optimization with varying motion conditions. Our method was verified on a high-acceleration die bonder. The amplitude of residual vibration could be decreased by more than 20% via structural optimization and the positioning time could be reduced by more than 40% via asymmetric variable velocity planning. This method provides an effective theoretical support for the precision positioning of high-acceleration low-load mechanisms.
Keywords
high-acceleration low-load mechanism ; precision positioning ; spatial and temporal distribution ; inertial energy ; equivalent static loads method (ESLM) ; velocity planning
Figures
Fig. 1
Fig. 2
Fig. 3

Fig. 4

Fig. 5
Fig. 6
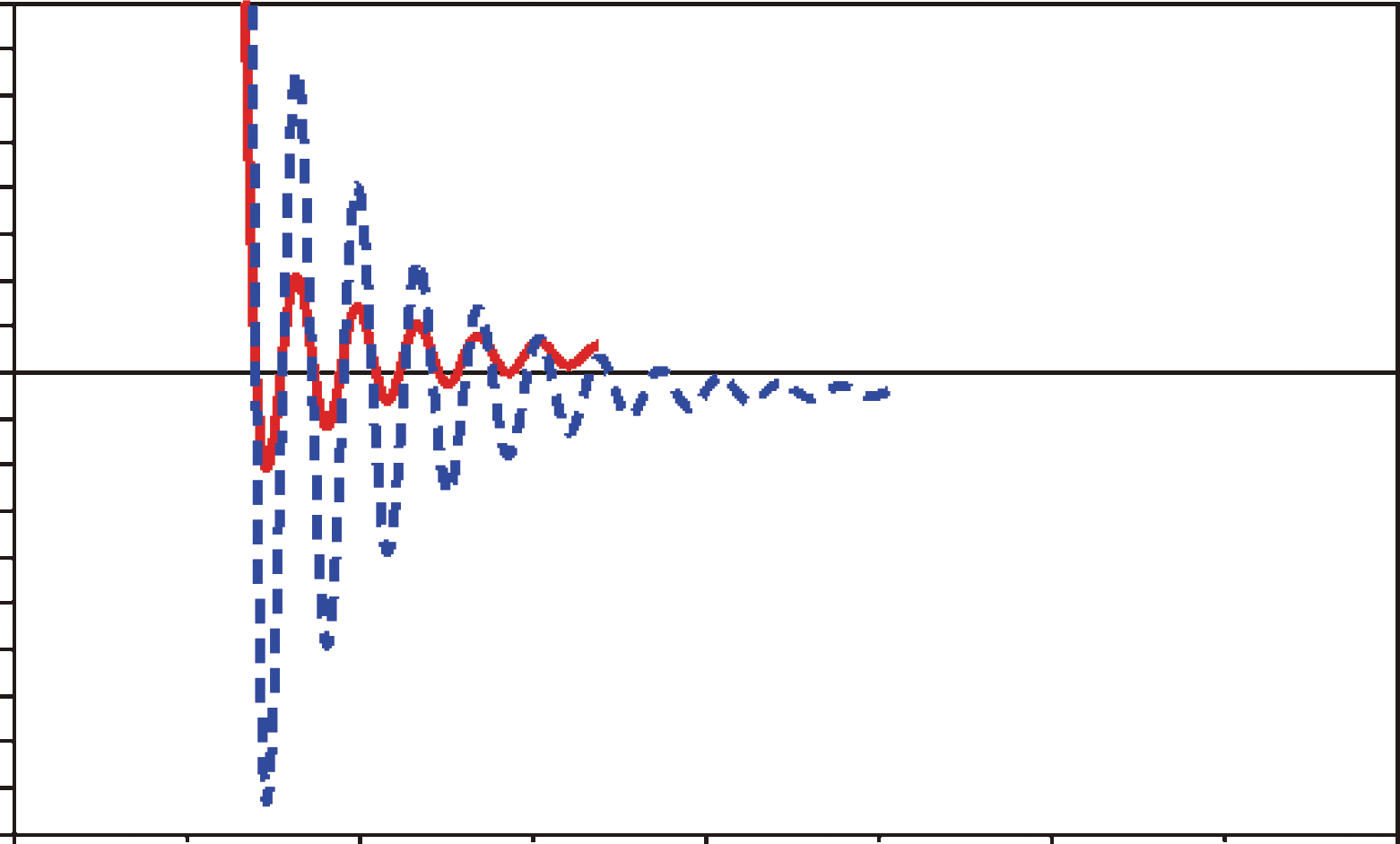
Fig. 7
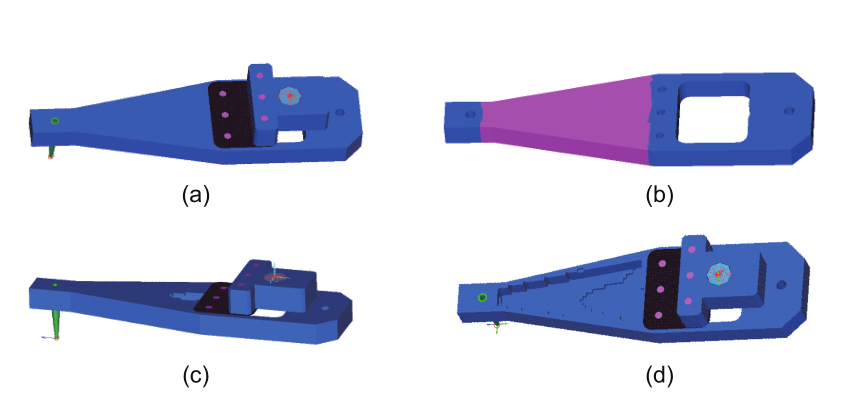
Fig. 8
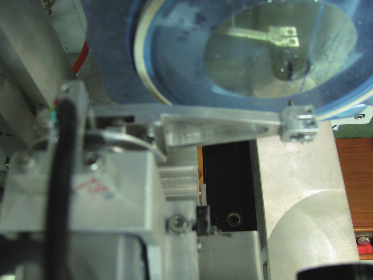
Fig. 9
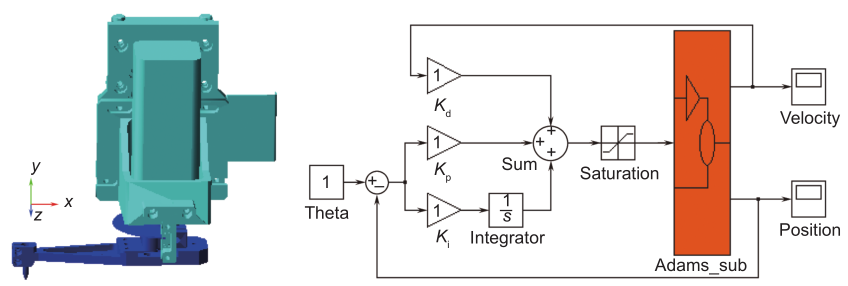
Fig. 10
References
[ 1 ] H. Ding, L. M. Zhu, Z. Q. Lin. Accurate positioning and operation of high acceleration and high precision stage for IC packaging. Prog. Nat. Sci., 2003, 13(6): 568–574 (in Chinese)
[ 2 ] Z. H. Feng, H. Y. Hu. Advances in dynamics of high-speed mechanisms. Adv. Mech., 2002, 32(2): 196–204 (in Chinese)
[ 3 ] O. Wallrapp. Review of past developments in multibody system dynamics at DLR—From FADYNA to SIMPACK. Vehicle Syst. Dyn., 2004, 41(5): 339–348 link1
[ 4 ] W. S. Choi, G. J. Park. Structural optimization using equivalent static loads at all the time intervals. Comput. Method. Appl. M., 2002, 191(19−20): 2105–2122 link1
[ 5 ] G. J. Park, B. S. Kang. Validation of a structural optimization algorithm transforming dynamic loads into equivalent static loads. J. Optimiz. Theory App., 2003, 118(1): 191–200
[ 6 ] W. S. Choi, G. J. Park. Structural optimization using equivalent static loads at all time intervals. Comput. Method. Appl. M., 2002, 191(19−20): 2105–2122 link1
[ 7 ] Y. I. Kim, G. J. Park. Nonlinear dynamic response structural optimization using equivalent static loads. Comput. Method. Appl. M., 2010, 199(9−12): 660–676 link1
[ 8 ] M. K. Shin, K. J. Park, G. J. Park. Optimization of structures with nonlinear behavior using equivalent loads. Comput. Method. Appl. M., 2007, 196(4−6): 1154–1167 link1
[ 9 ] H. A. Lee, Y. I. Kim, G. J. Park, R. M. Kolonay, M. Blair, R. A. Canfield. Structural optimization of a joined wing using equivalent static loads. J. Aircraft, 2007, 44(4): 1302–1308 link1
[10] B. S. Kang, G. J. Park, J. S. Arora. Optimization of flexible multibody dynamic systems using the equivalent static load method. AIAA J., 2005, 43(4): 846–852
[11] K. D. Nguyen, T. C. Ng, I. M. Chen. On algorithms for planning S-curve motion profiles. Int. J. Adv. Robot. Syst., 2008, 5(1): 99–106
[12] K. Zheng, L. Cheng. Adaptive s-curve acceleration/deceleration control method. In: Proceedings of the 7th World Congress on Intelligent Control and Automation. Chongqing, China, 2008: 2752–2756
[13] P. H. Meckl. Optimized s-curve motion profiles for minimum residual vibration. In: Proceedings of the 1998 American Control Conference. Philadelphia, PA, USA, 1998: 2627–2631
[14] H. Z. Li, Z. Gong, W. Lin, T. Lippa. A new motion control approach for jerk and transient vibration suppression. In: Proceedings of 2006 IEEE International Conference on Industrial Informatics. Singapore, 2006: 676–681
[15] Z. J. Yang. Topological optimization approach for structure design of high acceleration mechanisms using equivalent static loads method. J. Mech. Eng., 2011, 47(17): 119–126 (in Chinese)
[16] Z. J. Yang, X. Chen, R. Kelly. A topological optimization approach for structural design of a high-speed low-load mechanism using the equivalent static loads method. Int. J. Numer. Meth. Eng., 2012, 89(5): 584–598
[17] H. Li, M. D. Le, Z. M. Gong, W. Lin. Motion profile design to reduce residual vibration of high-speed positioning stages. IEEE/ASME T. Mech., 2009, 14(2): 264–269 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




