
2015年 第1卷 第1期
《工程(英文)》 >> 2015年 第1卷 第1期 doi: 10.15302/J-ENG-2015006
美国国防部先进研究项目局举办的机器人大挑战赛的参与和崎岖地面行走的滑雪式步态
Department of Electrical and Computer Engineering, Ohio State University, Columbus, OH 43210, USA
下一篇 上一篇
摘要
本文简要介绍了美国国防部先进研究项目局举办的机器人大挑战赛的历史,并将关注的焦点放在了2012机器人挑战赛上。作为该挑战赛DRC-HUBO队的成员,我们为完成崎岖地面的任务提出了不同的方法,如增大脚踏板、转换成四足行走等。同时,本文还介绍了一种帮助提高仿人机器人运动稳定性的新步态——滑雪式步态。本文对该步态的稳定性进行了分析,并利用稳定度裕量从两种备选的步进顺序(爬行-1和爬行-2)中进行选择。接下来,本文对滑雪式步态中冗余的闭链系统进行力/力矩分析,通过最小化总耗能量来确定关节力矩。根据稳定性分析和力/力矩分析,我们设计了一种手杖长度,使其可以支撑HUBO2仿人机器人平台稳定地实现爬行-2步态。最后,通过将本文的试验结果和两足步行进行对比,验证了滑雪式步态的可行性。同时,介绍了我队在该机器人挑战赛上的表现。
关键词
图片
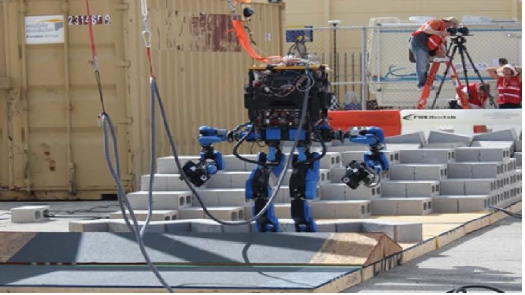
图1
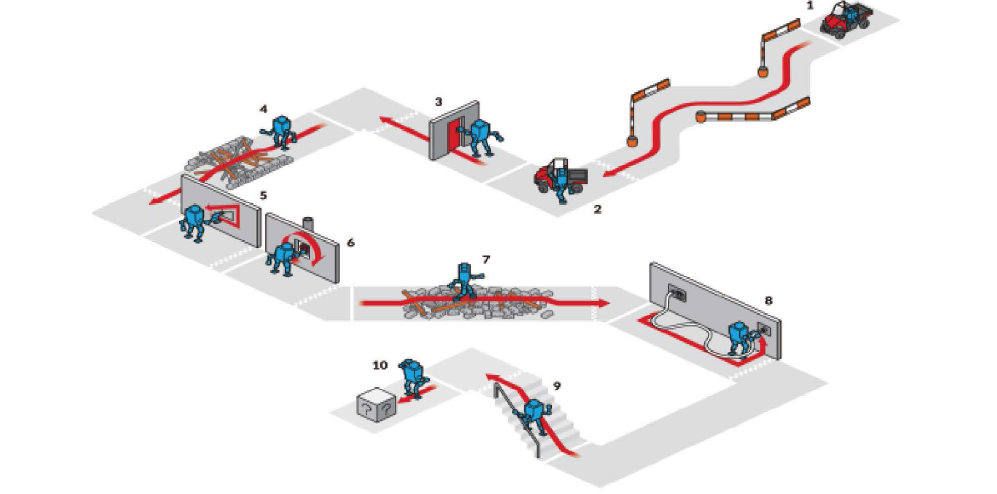
图2
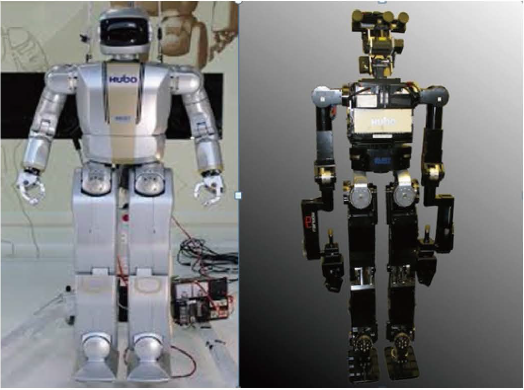
图3

图4

图5
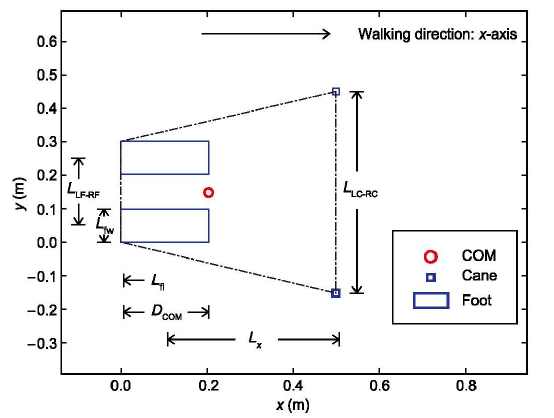
图6

图7
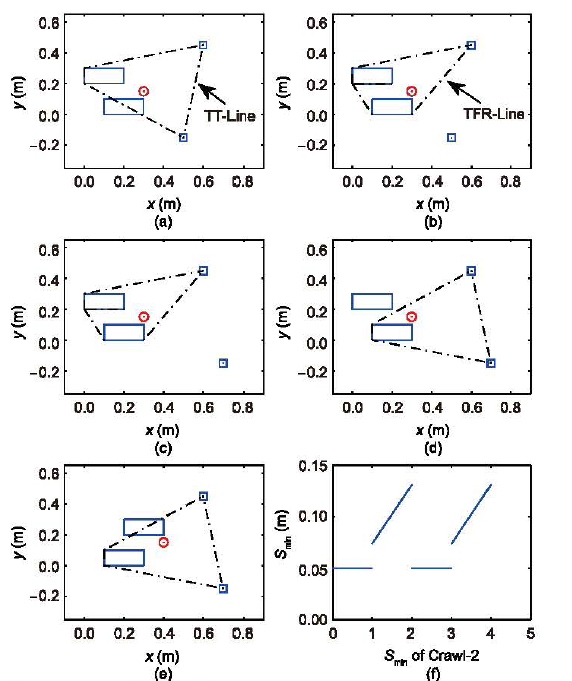
图8

图9

图10

图11

图12

图13
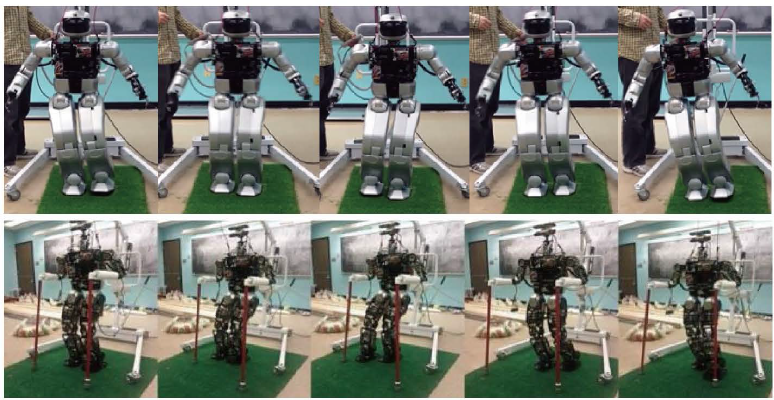
图14
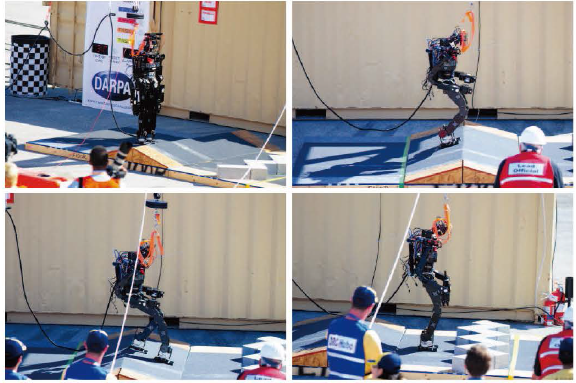
图15
参考文献
[ 1 ] DARPA. http://www.darpa.mil/about.aspx
[ 2 ] J. Markoff. Google cars drive themselves, in traffic. New York Times, 2010, 9
[ 3 ] Self-driving car test: Steve mahan. http://www.google.com/about/careers/lifeatgoogle/self-driving-car-test-steve-mahan.html
[ 4 ] Z. Sun, G. Bebis, R. Miller. On-road vehicle detection: A review. IEEE Trans. Pattern Anal. Mach. Intell., 2006, 28(5): 694–711 链接1
[ 5 ] A. Geiger, P. Lenz, R. Urtasun. Are we ready for autonomous driving? The KITTI vision benchmark suite. In: IEEE Conf. Computer Vision and Pattern Recognition (CVPR). Providence: IEEE, 2012: 3354–3361
[ 6 ] A. Broggi, P. Cerri, S. Ghidoni, P Grisleri, H. G. Jung. A new approach to urban pedestrian detection for automatic braking. IEEE Trans. Intell. Transp. Syst., 2009, 10(4): 594–605 链接1
[ 7 ] C. Urmson, et al. Autonomous driving in urban environments: Boss and the Urban Challenge. J. Field Robot., 2008, 25(8): 425–466 链接1
[ 8 ] G. Pratt, J. Manzo. The DARPA robotics challenge. IEEE Robot. Autom. Mag., 2013, 20(2): 10–12
[ 9 ] Asimo. http://asimo.honda.com
[10] S. M. Song, K. J. Waldron. Machines that Walk: The Adaptive Suspension Vehicle. Cambridge: MIT Press, 1989
[11] K. J. Waldron, V. J. Vohnout, A. Pery, R. B. McGhee. Configuration design of the adaptive suspension vehicle. Int. J. Robot. Res., 1984, 3(2): 37–48
[12] R. B. McGhee, G. I. Iswandhi. Adaptive locomotion of a multilegged robot over rough terrain. IEEE Trans. Syst. Man Cybern., 1979, 9(4): 176–182 链接1
[13] BigDog. http://www.bostondynamics.com/robot_bigdog.html
[14] Y. F. Zheng, F. R. Jr Sias. Design and motion control of practical biped robots. Int. J. Robot. Autom., 1988, 3(2): 70–78
[15] Y. Sakagami, R. Watanabe, C. Aoyama, S. Matsunaga, N. Higaki, K. Fujimura. The intelligent ASIMO: System overview and integration. In: IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), vol. 3, 2002: 2478–2483
[16] T. Ishida. Development of a small biped entertainment robot QRIO. In: IEEE Int. Symp. Micro-Nanomechatronics and Human Science. IEEE, 2004: 23–28
[17] Petman. http://www.bostondynamics.com/robot_petman.html
[18] Atlas. http://www.bostondynamics.com/robot_Atlas.html
[19] SCHAFT. http://theroboticschallenge.org/teams/schaft
[20] CHIMP. http://www.theroboticschallenge.org/teams/tartan-rescue
[21] RoboSimian. http://www.theroboticschallenge.org/teams/robosimian
[22] Y. F. Zheng, et al. Humanoid robots walking on grass, sands and rocks. In: IEEE Int. Conf. Technologies for Practical Robot Applications (TePRA). Woburn: IEEE, 2013: 1–6
[23] H. Kawamoto, S. Lee, S. Kanbe, Y. Sankai. Power assist method for HAL-3 using EMG-based feedback controller. In: IEEE Int. Conf. on Systems, Man and Cybernetics, vol. 2, 2003: 1648–1653
[24] L. Lunenburger, G. Colombo. R. Riener, V. Dietz. Clinical assessments performed during robotic rehabilitation by the gait training robot Lokomat. In: Int. Conf. on Rehabilitation Robotics (ICORR), 2005: 345–348
[25] S. Dubowsky, et al. Pamm—A robotic aid to the elderly for mobility assistance and monitoring: A “helping-hand” for the elderly. In: IEEE Int. Conf. Robotics and Automation (ICRA), vol. 1, 2000: 570–576
[26] A. Morris, et al. A robotic walker that provides guidance. In: IEEE Int. Conf. Robotics and Automation (ICRA), vol. 1, 2003: 25–30
[27] R. B. McGhee, A. A. Frank. On the stability properties of quadruped creeping gaits. Math. Biosci., 1968, 3: 331–351 链接1
[28] H. Wang, S. Li, Y. Zheng, T. Kim, P. Oh. Ski-type self-balance humanoid walking for rough terrain. In: IEEE Int. Conf. Robotics and Automation (ICRA), vol. 2, 2014: 1620–1626
[29] Hubo humanoid robot. http://www.ros.org/wiki/Robots/HUBO
[30] J. Kerr, B. Roth. Special grasping configurations with dexterous hands. In: IEEE Int. Conf. Robotics and Automation (ICRA), vol. 3, 1986: 1361–1367
[31] D. E. Orin, S. Y. Oh. Control of force distribution in robotic mechanisms containing closed kinematic chains. J. Dyn. Syst. Meas. Control, 1981, 103(2): 134–141 链接1
[32] Openhubo. https://github.com/daslrobotics/openHubo
[33] H. Wang, Y. F. Zheng, Y. Jun, P. Oh. DRC-Hubo walking on rough terrains. In: IEEE Int. Conf. Technologies for Practical Robot Applications (TePRA). Woburn: IEEE, 2014: 1–6











 京公网安备 11010502051620号
京公网安备 11010502051620号




