
2013, Volume 15, Issue 1
Strategic Study of CAE >> 2013, Volume 15, Issue 1
An improved immunity path planning algorithm for mobile robots based on the guidance weight of artificial potential field
School of Mechanical Engineering, Xi'an Jiaotong University, Xi'an 710049, China
Next Previous
Abstract
To solve the path planning problem of mobile robots in complicated environments, combining the small computational amount of artificial potential field and the adaptive regulation ability of artificial immune network, an improved immunity path planning algorithm is presented. To further improve the search ability and convergence of immune network, the planning results of artificial potential field are taken as the prior knowledge to construct the guidance weight, and the antibody instruction definition and distance changes after the antibody transition are taken as the variables to construct the antibody transmission probability operator. Compared with the correlative planning algorithms, simulation results indicate that the optimal planning ability and network convergence of proposed algorithm is highly improved.
Keywords
immune network ; artificial potential field ; mobile robots ; path planning
Figures
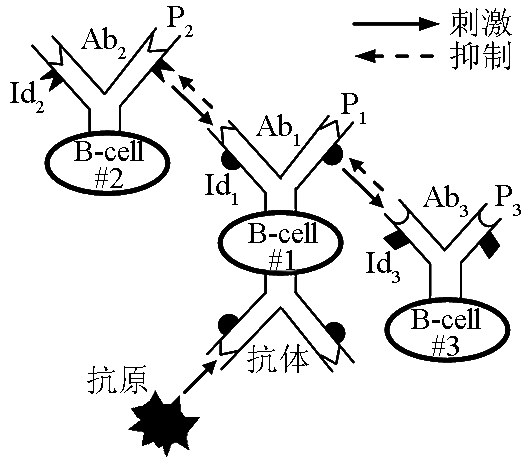
图1
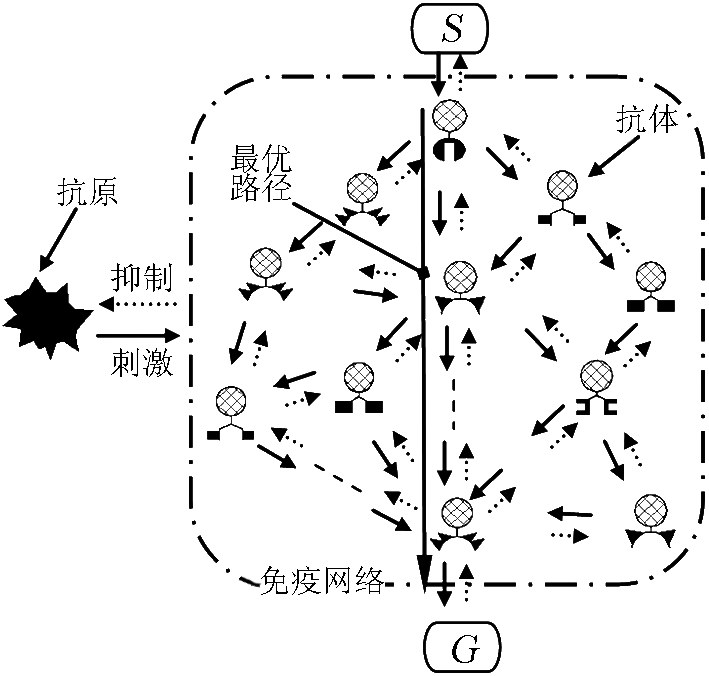
图2
图3
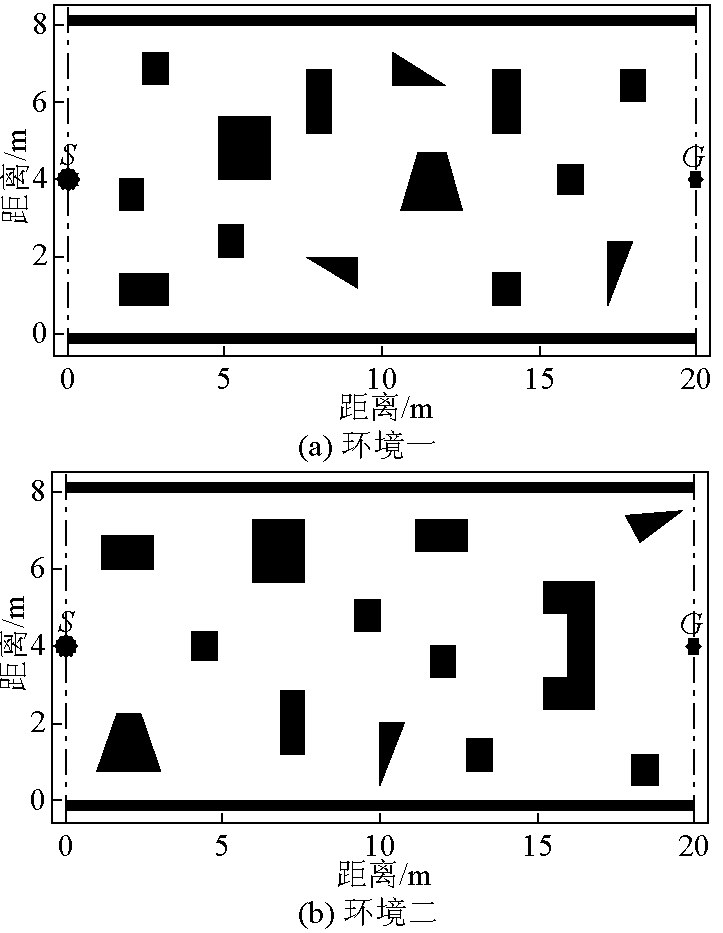
图4
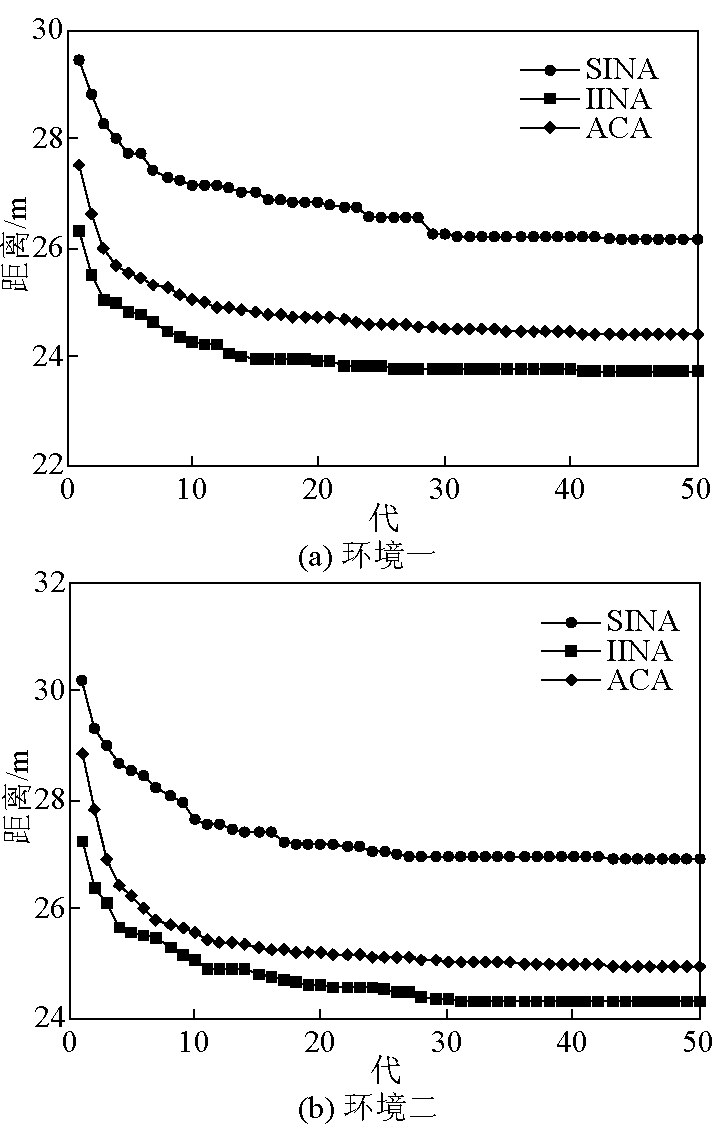
图5
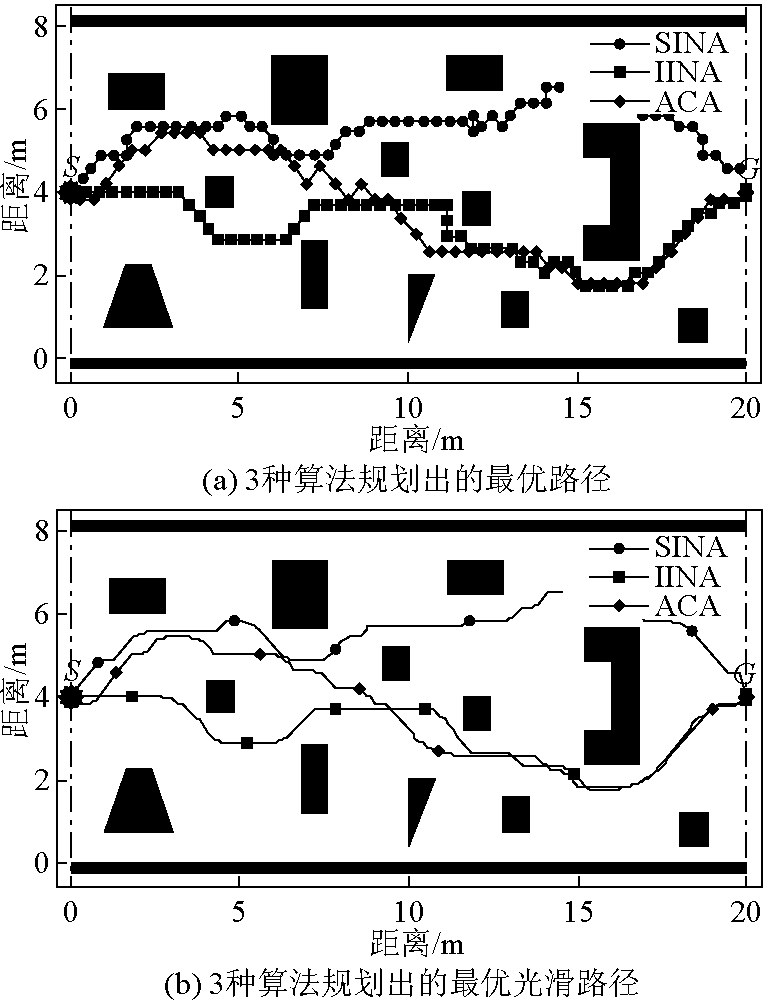
图6
References
[ 1 ] 蒋新松. 机器人学导论[M]. 辽宁:辽宁科学技术出版社,1994.
[ 2 ] Saboori I,Menhaj M B,Karimi B. Optimal robot path planning based on fuzzy model of obstacles [C]// Proceedings of 2006 IEEE International Conference on Industrial Electronics. USA: NJ,Piscataway. IEEE,2006:383-387. link1
[ 3 ] Liu J,Yang D Y. Path planning based on double-layer genetic algorithm [C]// Proceedings of the Third International Conference on Natural Computation. USA:NJ,Piscataway. IEEE,2007:357-361. link1
[ 4 ] Liu G Q,Li T J,Li Y P. The ant algorithm for solving robot path planning problem [C]// Proceedings of the Third International Conference on Information Technology and Applications. USA: NJ,Piscataway. IEEE,2005:25-27. link1
[ 5 ] Yuan M X,Wang S A,Li K P. A model of ant colony and immune network and its application in path planning [C]// Proceedings of 3rd IEEE Conference on Industrial Electronics and Application. USA:NJ,Piscataway. IEEE,2008:102-107. link1
[ 6 ] Dasgupta D. Artificial Immune Systems and Their Applications [M]. Berlin:Springer-Verlag,Inc,1999.
[ 7 ] Farmer J D,Packard N H,Perelson A S. The immune system, adaptation and machine learning [J]. Physics D,1986,2(2):187-204. link1
[ 8 ] Ishiguro A,Shirai Y,Kondo T,et al. Immunoid:an architecture for behavior arbitration based on the immune networks [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. USA:NJ,Piscataway. IEEE,1996:1730- 1736. link1
[ 9 ] Meshref H,VanLandingham H. Artificial immune systems:application to autonomous agents [C]// IEEE International Conference on Systems,Man,and Cybernetics. USA:NJ,Piscataway. IEEE,2000:61-66.
[10] 庄 健,王孙安. 基于人工免疫网络机器人路径规划算法的进 一步研究[J]. 系统仿真学报,2004,16(5):1017-1019. link1
[11] Jerne N K. Idiotypic networks and other preconceived ideas [J]. Immunological Rev,1984,79:5-24. link1
[12] Yuan M X,Wang S A,Zhuang J,et al. Immune network algorithm based on improved APF for on- line dynamic planning [C]// Proceedings of IEEE International Conference on Robotics,Automation and Mechatronics. 2008:193-198. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




