2023年 第20卷 第1期
《工程(英文)》 >> 2023年 第20卷 第1期 doi: 10.1016/j.eng.2022.05.015
基于Watt连杆的可重复使用运载火箭腿式可展开着陆机构——原理、原型设计和实验验证
a State Key Laboratory of Robotics and Systems, Harbin Institute of Technology, Harbin 150080, China
b Beijing Institute of Aerospace Systems Engineering, Beijing 100076, China
下一篇 上一篇
摘要
可重复使用运载火箭是降低太空运输成本的一种新途径。着陆机构是可重复使用运载火箭的重要组成部分,起到着陆支撑和吸收冲击的作用。本文提出了一种新型的可展开着陆机构(LDLM)。采用Watt-II型六杆机构,利用连杆变分法得到优选构型。本文建立了多目标优化范式,使得可展开着陆机构具有着陆支撑区域大、轻量化、连杆内力合理等优点,在此基础上,利用多目标遗传算法(NSGA-II)进化算法得到了可展开式着陆机构设计的最优尺寸参数。本文研制了全功能可重复使用运载火箭缩比样机,通过集成重力控制的展开方案促进展开动作,避免全范围驱动,采用双重锁紧机构提高展开状态时结构的可靠性,采用多级铝蜂窝缓冲器提供可靠的减震性能。实验结果表明,所提出的可展开式着陆机构能够提供快速平稳的展开(持续时间小于1.5 s),且对舱体的姿态扰动较小(偏航和俯仰波动小于6°)。此外,该机构在0.2 m自由落体测试中提供了足够的冲击衰减(加速度峰值小于10g)。所提出的可展开着陆机构可作为未来可重复使用运载火箭潜在的腿式起落架替代方案。
关键词
可重复使用运载火箭(RLV) ; 可展开机构 ; 优化设计
补充材料
图片
图1

图2
图3
图4

图5
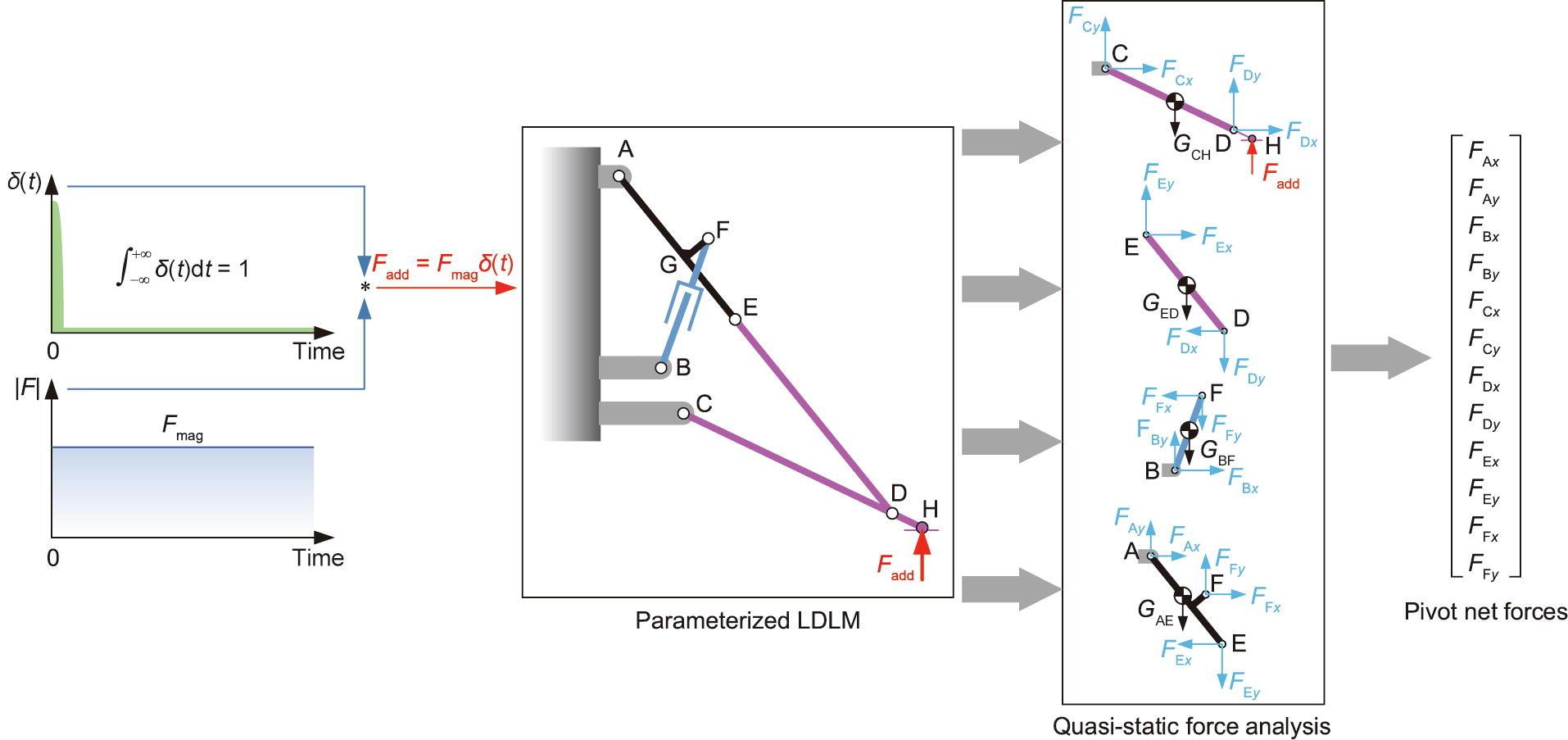
图6
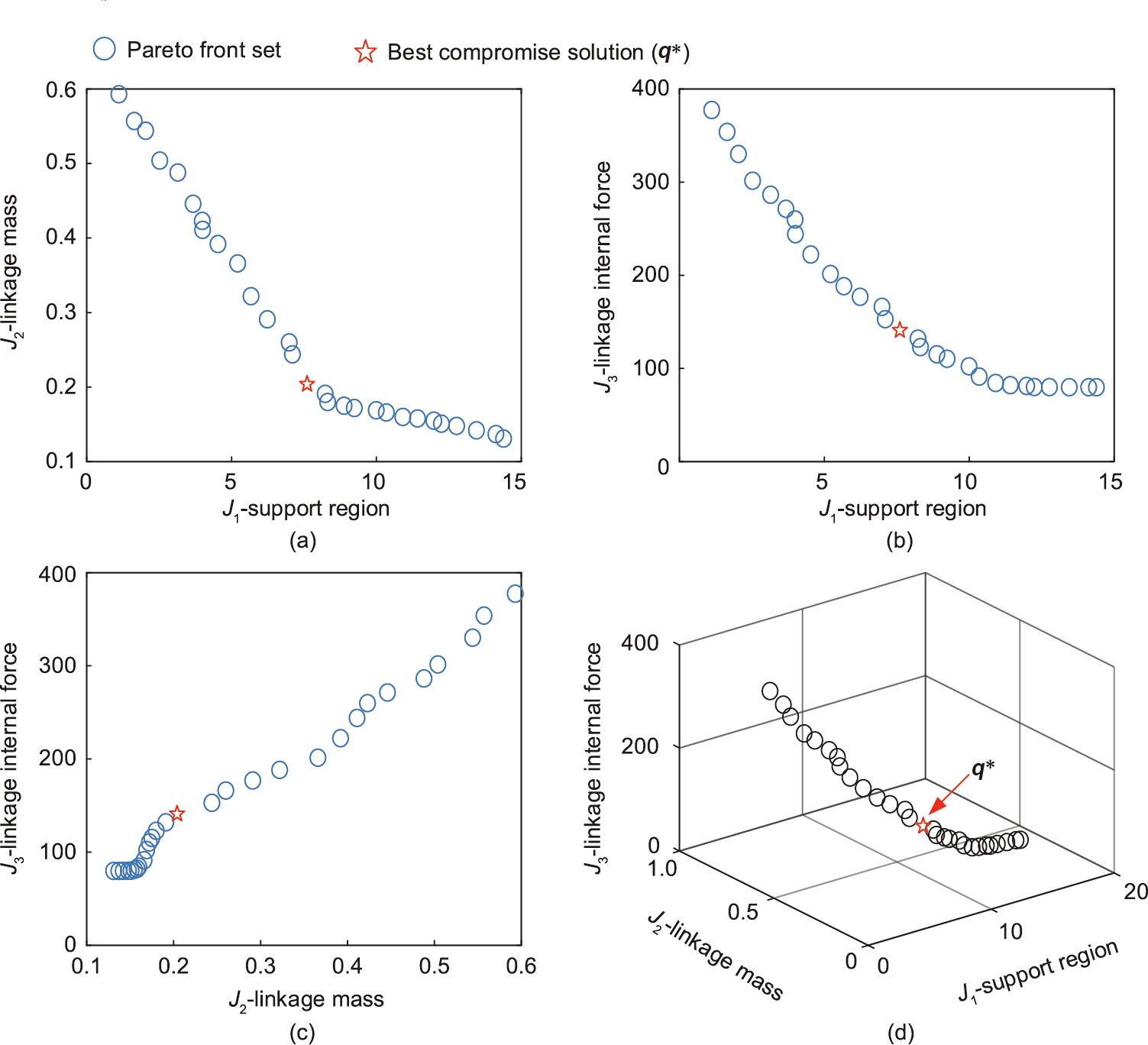
图7

图8
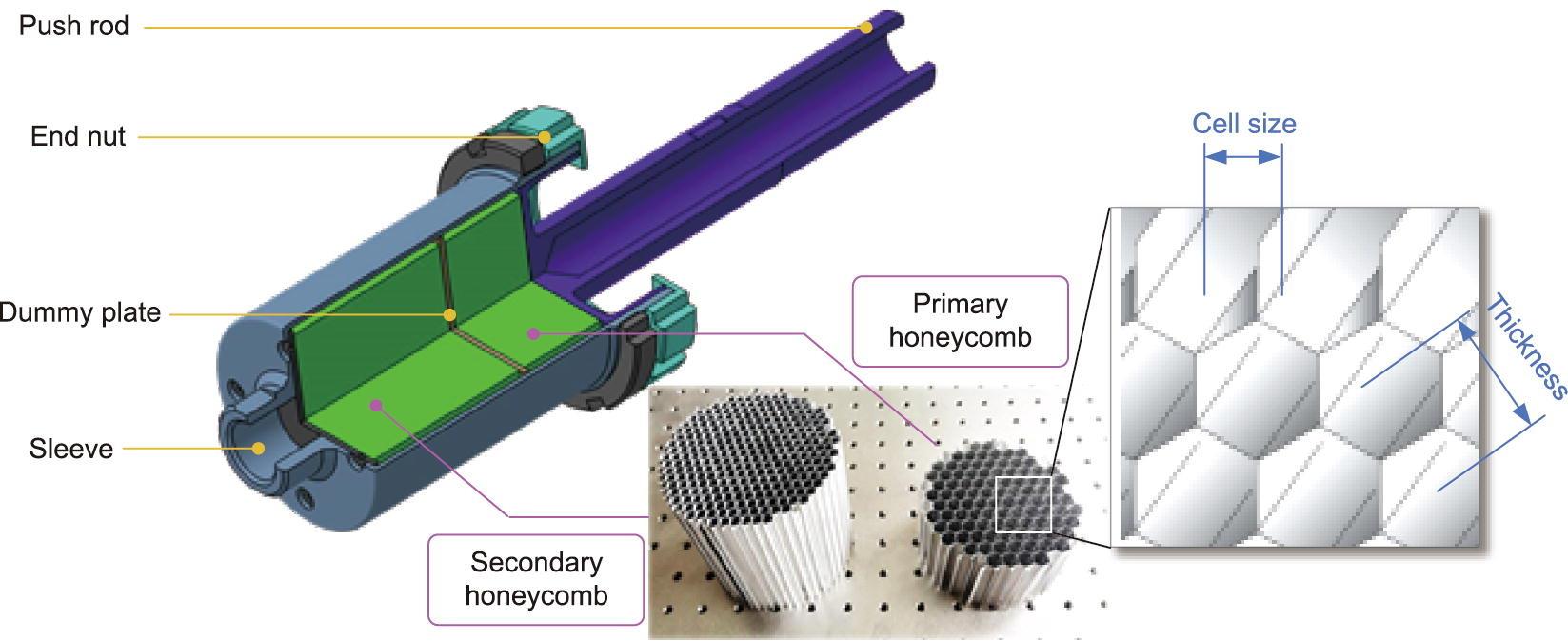
图9
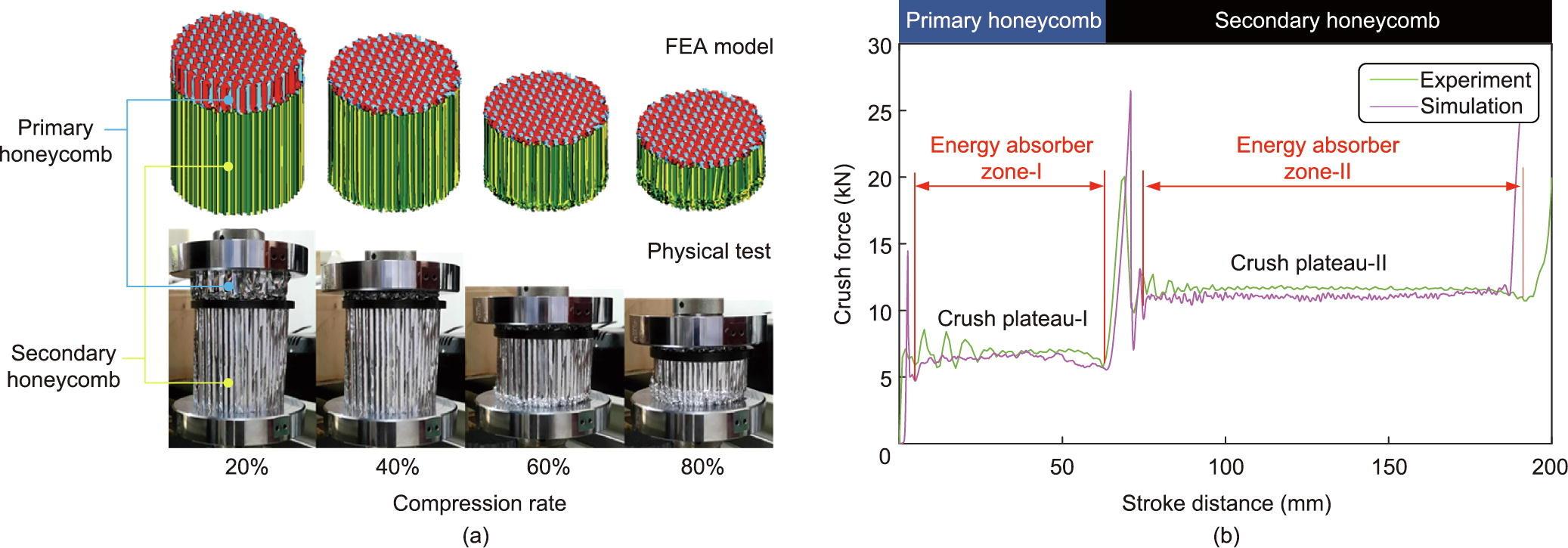
图10

图11
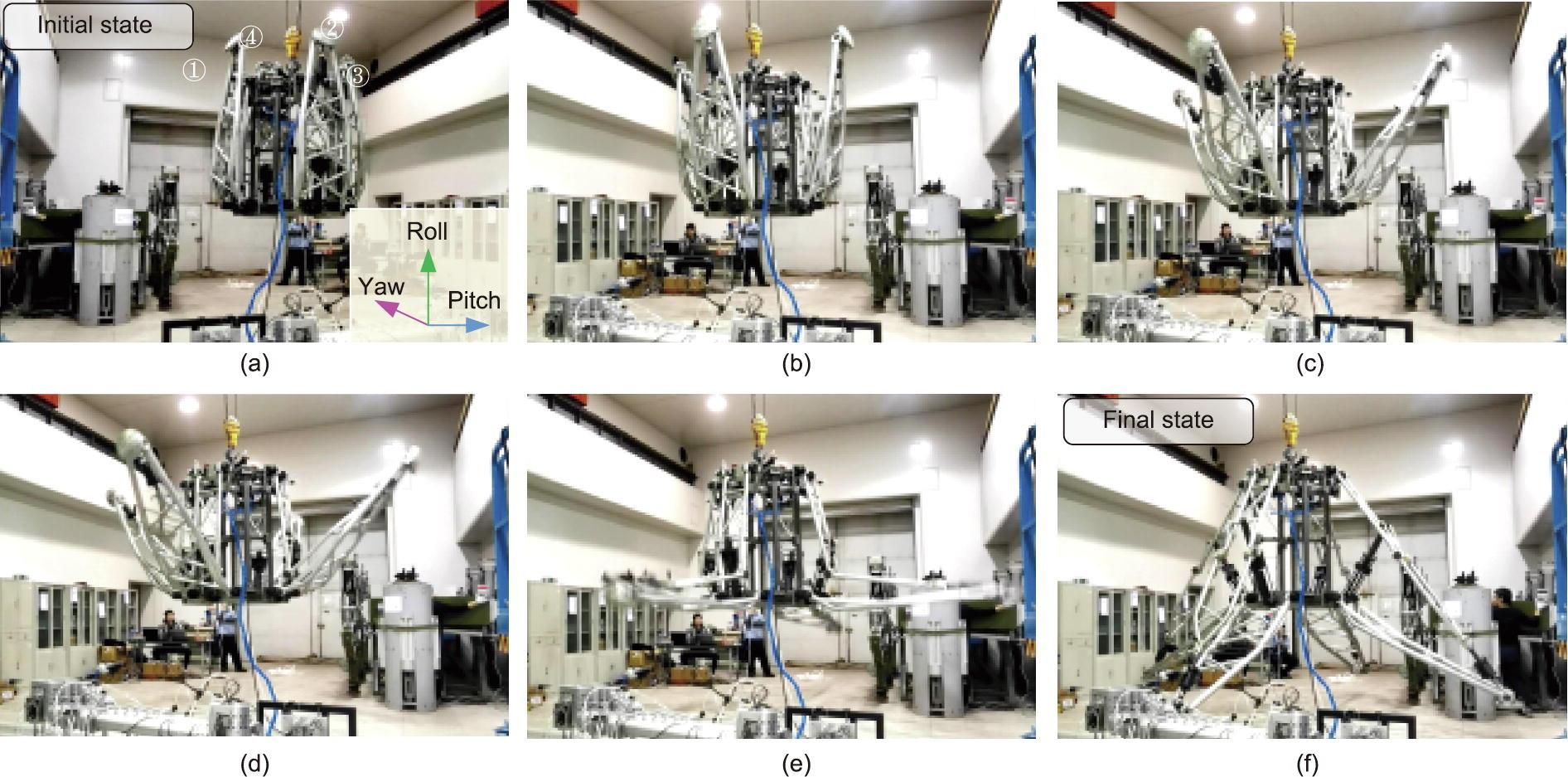
图12
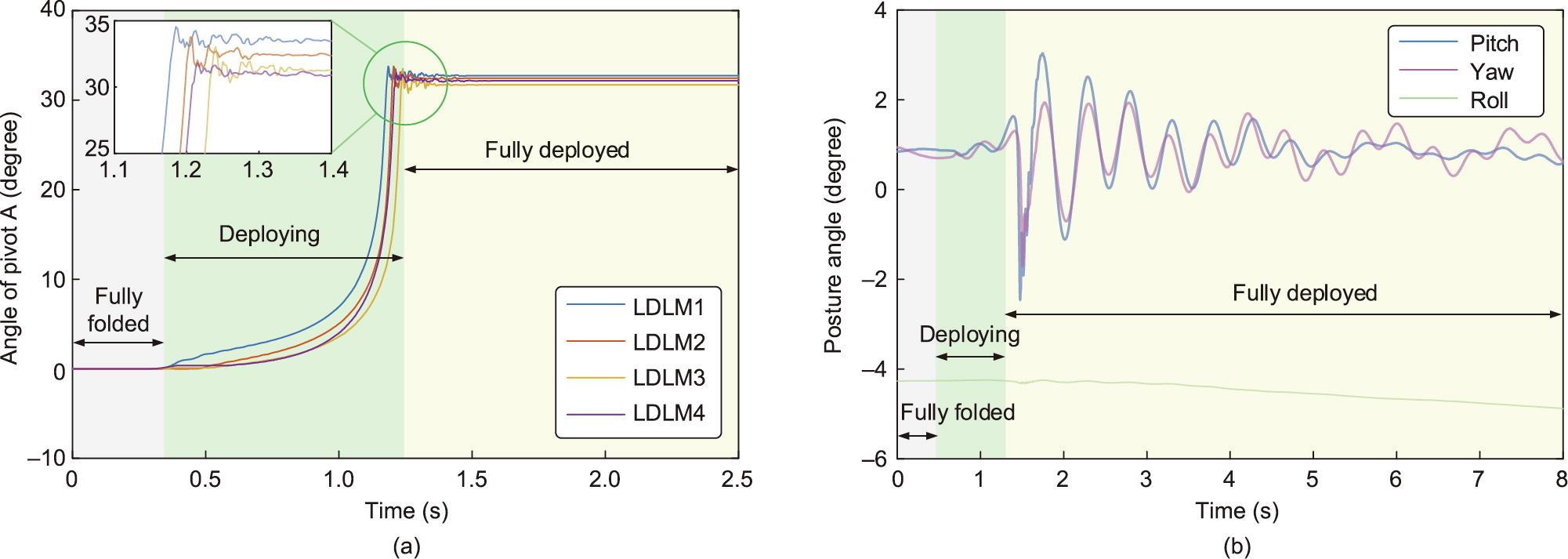
图13
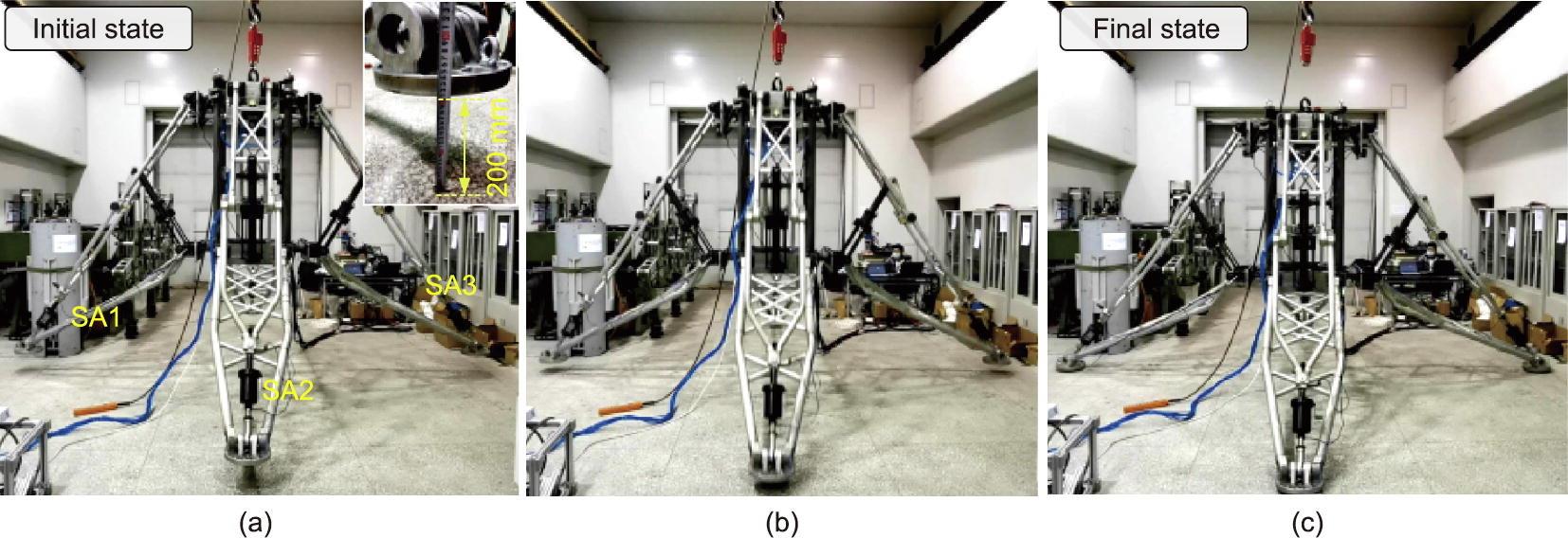
图14
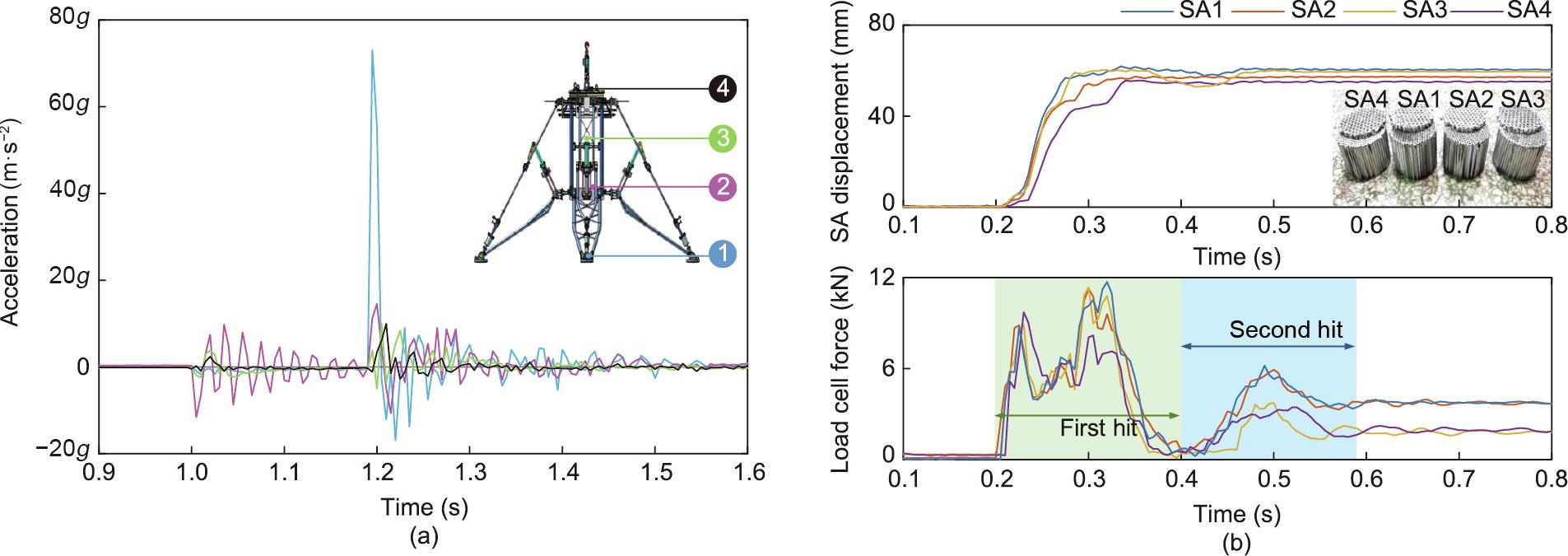
图15
图16
参考文献
[ 1 ] Freeman DC, Talay TA, Austin RE. Reusable launch vehicle technology program. Acta Astronaut 1997;41(11):777‒90. 链接1
[ 2 ] Jones HW. The recent large reduction in space launch cost. In: Proceedings of the 48th International Conference on Environmental Systems (ICES); 2018 Jul 8‒12; Albuquerque, NM, USA. ICES; 2018. p. 81. 链接1
[ 3 ] Jones HW. Much lower launch costs make resupply cheaper than recycling for space life support. In: Proceedings of the 47th International Conference on Environmental Systems (ICES). 2017 Jul 16‒20; Charleston, SC, USA. ICES; 2017. p. 87. 链接1
[ 4 ] Wilson EK. Space tourism moves closer to lift off. Engineering 2019;5(5): 819‒21. 链接1
[ 5 ] Davis LA. First stage recovery. Engineering 2016;2(2):152‒3. 链接1
[ 6 ] Palmer C. Astronauts hitch first ride aboard private rocket to space station. Engineering 2020;6(11):1207‒9. 链接1
[ 7 ] Davis LA. Falcon heavy. Engineering 2018;4(3):300. 链接1
[ 8 ] Leslie M. The world’s most powerful rocket. Engineering 2019;5(5):822‒3. 链接1
[ 9 ] Weiss SP. Apollo experience report: lunar module structural subsystem. Report. Washington, DC: National Aeronautics and Space Administration; 1973 Mar. Report No.: NASA TN D-7084.
[10] Klevatt PL. Design engineering and rapid prototyping for the DC-X single stage rocket technology vehicle. In: Proceedings of the 36th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference; 1995 Apr 10‒13; New Orleans, LA, USA. AIAA; 1995. p. 95. 链接1
[11] Dumbacher D, Klevatt PL. DC-XA—first step to a reusable launch vehicle. In: Proceedings of AIAA Space Programs and Technologies Conference and Exhibit; 1994 Sep 27‒29; Huntsville, AL, USA. AIAA; 1994. p. 94. 链接1
[12] Falcon user’s guide [Manual]. Hawthorne: Space Exploration Technologies Corp. (SpaceX); 2020. 链接1
[13] Zhang M, Xu D, Yue S, Tao H. Design and dynamic analysis of landing gear system in vertical takeoff and vertical landing reusable launch vehicle. Proc Inst Mech Eng Part G 2019;233(10):3700‒13. 链接1
[14] Yue S, Nie H, Zhang M, Huang M, Zhu H, Xu D. Dynamic analysis for vertical soft landing of reusable launch vehicle with landing strut flexibility. Proc Inst Mech Eng Part G 2019;233(4):1377‒96. 链接1
[15] Maeda T, Otsuki M, Hashimoto T, Hara S. Attitude stabilization for lunar and planetary lander with variable damper. J Guid Control Dynam 2016;39(8):1790‒804. 链接1
[16] Maeda T, Otsuki M, Hashimoto T. Protection against overturning of a lunar-planetary lander using a controlled landing gear. Proc Inst Mech Eng Part G 2019;233(2):438‒56. 链接1
[17] Agarwal S, Bandyopadhyay S. Design of six-bar function generators using dual-order structural error and analytical mobility criteria. Mech Mach Theory 2017;116:326‒51. 链接1
[18] Plecnik MM, McCarthy JM. Computational design of Stephenson II six-bar function generators for 11 accuracy points. J Mech Rob 2016;8(1):11017. 链接1
[19] Ma S, Tomiyama T, Wada H. Omnidirectional static walking of a quadruped robot. IEEE Trans Rob 2005;21(2):152‒61. 链接1
[20] Golubev FY, Melkumova EV. Static-stability conditions for awalking apparatus in horizontal cylinder and on two planes. J Comput Syst Sci Int 1999;38(2):278‒84.
[21] Bretl T, Lall S. Testing static equilibrium for legged robots. IEEE Trans Rob 2008;24(4):794‒807. 链接1
[22] Golabi S, Fesharaki JJ, Yazdipoor M. Gear train optimization based on minimum volume/weight design. Mech Mach Theory 2014;73:197‒217. 链接1
[23] ISO/TS 15066: Robots and robotic devices—collaborative robots. International standard. Berlin: Beuth-Verlag; 2016.
[24] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 2002;6(2):182‒97. 链接1
[25] Zhang Q, Li H. MOEA/D: a multiobjective evolutionary algorithm based on decomposition. IEEE Trans Evol Comput 2007;11(6):712‒31. 链接1
[26] Behzadian M, Otaghsara SK, Yazdani M, Ignatius J. A state-of the-art survey of TOPSIS applications. Expert Syst Appl 2012;39(17):13051‒69. 链接1
[27] Lin J. Divergence measures based on the Shannon entropy. IEEE Trans Inform Theory 1991;37(1):145‒51. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




