1. 概述
《1.1. 车桥耦合动力分析的研究背景》1.1. 车桥耦合动力分析的研究背景
随着行车速度的提高、荷载的加大,桥梁结构的动力问题日益突出,列车过桥时由于桥梁振动导致的结构安全性、动力承载力和使用可靠性等正在成为人们广泛关注的重要问题。车桥动力反应的分析结果可直接用于桥梁动力性能评估、动力加固方法的确定和加固效果的评估。因此,对车辆-桥梁动力相互作用进行综合研究,保障桥梁动力性能及行驶车辆的走行性和安全性,是铁路桥梁研究设计的工程需要,具有十分重要的意义。
早在19世纪40年代,国外就开始了铁路桥梁动力响应问题的研究工作。但是,由于车辆荷载作用下的桥梁振动是一个复杂的课题,要得到符合实际的结果,必须考虑很多因素,包括车体和转向架的质量,阻尼器和弹簧的作用,行车速度,梁跨和墩台的质量、刚度和阻尼,桥上轨道结构的型式,轨道的动力特性,车轮和轨道、轨道和梁之间的动力相互作用关系等。此外,还有车轮的不平顺、轨道的几何不平顺和动力不平顺以及轮对的蛇行运动等很多随机因素,使得体系的力学模型十分复杂。因此,以往的研究不得不采用种种近似方法,往往带有较大的局限性。只是在近几十年,随着计算机的广泛应用和数值方法的发展,利用各种各样的数值解法,才使这个问题的研究有了较大的进展。
车桥耦合振动是一个涉及桥梁工程学、交通工程学、车辆动力学、轨道力学、风工程学、地震工程学、碰撞工程学以及振动控制等多个工程科学领域的复杂的研究体系,如图1所示。
《图1》
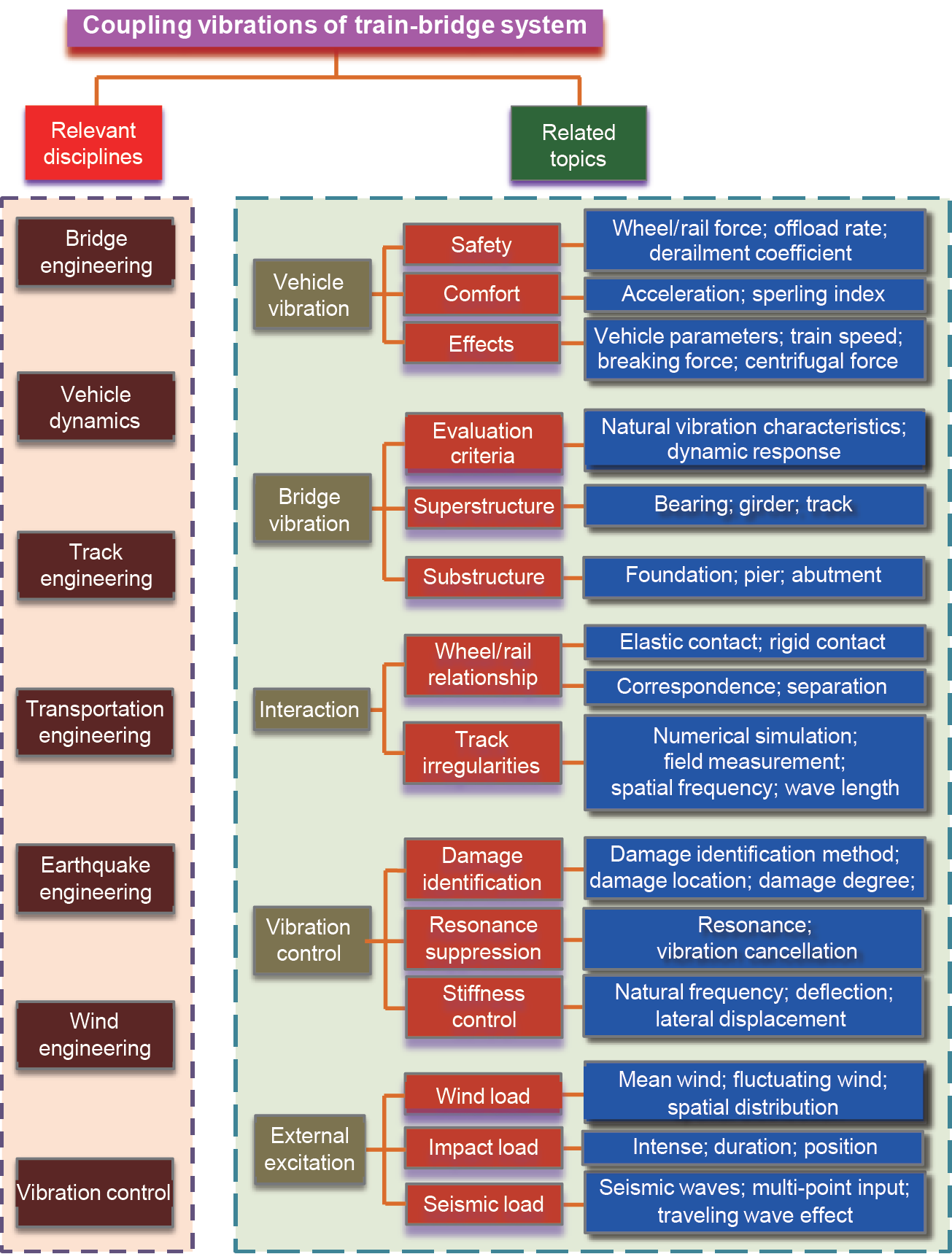
图1. 车桥耦合动力系统研究。
1.2. 车桥耦合动力分析的研究方法
车桥耦合振动的研究方法主要有三种,即解析法、数值模拟法、试验研究法。
1.2.1. 解析法
解析法就是对车辆-桥梁系统的每一个构成部分都采用理论模型来描述。解析法主要凭借数学和力学上的理论推导,比较严谨,它不仅能使研究者从理论上更深层次地理解问题,而且能够为数值模拟结果和经验预测结果的验证提供强有力的参考。但是由于车桥耦合振动分析是一个相当复杂的系统问题,在理论建模过程中必须对实际情况进行必要的简化,同时也必须对构件的几何特性和材料特性施加某些限制,或者直接选取理想状态,所以到目前为止精确的解析结果实际上是不存在的。即使在某些理想状态下,一些复杂情况的完全封闭形式的解也很难得到,只能采用一些诸如数值积分等方法对解析法得到的公式进行计算。
1.2.2. 数值模拟法
对车桥耦合振动问题,早期的大部分研究采用的都是解析法和试验法。近30多年,随着高性能计算机的问世,各种数值方法成为模拟车桥耦合振动问题的一个非常有效的工具,并且发挥着越来越重要的作用。比较常用的数值模拟法包括有限元方法、边界元方法和混合方法。由于受到计算手段和参数条件的限制,数值模拟法也不得不采用各种程度的近似假设,建立简单而易于计算的模型。这些简化模型面临的首要问题就是需要对建模的合理性进行验证,而这只能通过试验才能解决。鉴于实际桥梁和车辆的复杂性、移动荷载的时变特性,数值模拟法是目前车桥耦合振动分析中采用最多的方法。
1.2.3. 试验研究法
试验测试是研究车桥耦合振动的主要手段之一。有限元方法出现之前,试验测试是研究的主体,通过对车辆及桥梁状态进行试验测试,总结出经验公式或理论,用于指导桥梁设计;有限元方法出现以后,试验与理论分析密切结合,可节省大量的试验工作量。我们对一系列新型结构或高速行车下的振动问题也进行过一些试验,在试验的基础上建立车桥耦合振动模拟模型,根据模拟计算与试验结果的对比,寻找影响桥跨结构振动的主要因素。
试验方法通常被用于车桥耦合振动分析,由于小比例模型试验难以模拟复杂的轮轨相互作用关系,车桥系统的振动试验往往采用原型试验或现场实测的方法,这样得到的结果能客观而综合地反映桥梁在列车动载作用下的实际工作状况。但如果仅停留在试验阶段,而不去进一步揭露其内在规律,结果往往是为了确定新的动态参数而不得不随着桥梁结构类型、跨度及车辆性能等的不断变化而进行大量的重复试验,这样不仅耗资巨大,而且周期较长。因此,单纯的试验方法往往受到许多限制。
另外,单纯利用理论分析来解决这一问题也是很困难的。这是因为,车辆荷载作用下的桥梁振动是一个十分复杂的课题,要想通过理论分析得到符合实际的结果,必须考虑很多因素,包括车体和转向架的质量,阻尼器和弹簧的作用,行车速度,梁跨和墩台的质量、刚度和阻尼,桥上轨道结构的型式,轨道的动力特性,车轮和轨道、轨道和梁之间的动力相互作用关系等,此外还有车轮的不平顺、轨道的几何和动力不平顺以及轮对的蛇行运动等诸多随机因素的影响,这使得体系的力学模型十分复杂。所以,不得不采用各种各样的近似方法,建立较为简单的桥梁和车辆系统分析模型。例如,把列车荷载简化成移动的常力或确定性简谐激励。利用这些简化模型时,面临的首要问题就是需要对其建模的合理性进行验证,而这也只能通过试验才能解决。
《1.3. 车桥耦合动力系统方程》1.3. 车桥耦合动力系统方程
根据结构动力学理论,车桥耦合系统可视为多自由度系统,其运动方程可表示为[1–3]

式中,Mv、Cv、Kv 分别为车辆子系统的总体质量矩阵、总体阻尼矩阵及总体刚度矩阵;Mb、Cb、Kb 分别为桥梁子系统的总体质量矩阵、总体阻尼矩阵及总体刚度矩阵;Xv、Xb分别为车辆、桥梁子系统的位移向量;Fv、Fb分别为车辆、桥梁子系统的荷载向量。
车桥耦合体系上的作用可分为几大类,如图2所示。本节将就考虑轨道不平顺、结构变形、基础沉降、风、撞击、结构损伤、基础冲刷和地震等的车桥耦合振动分析数学表达式做简单介绍。
《图2》
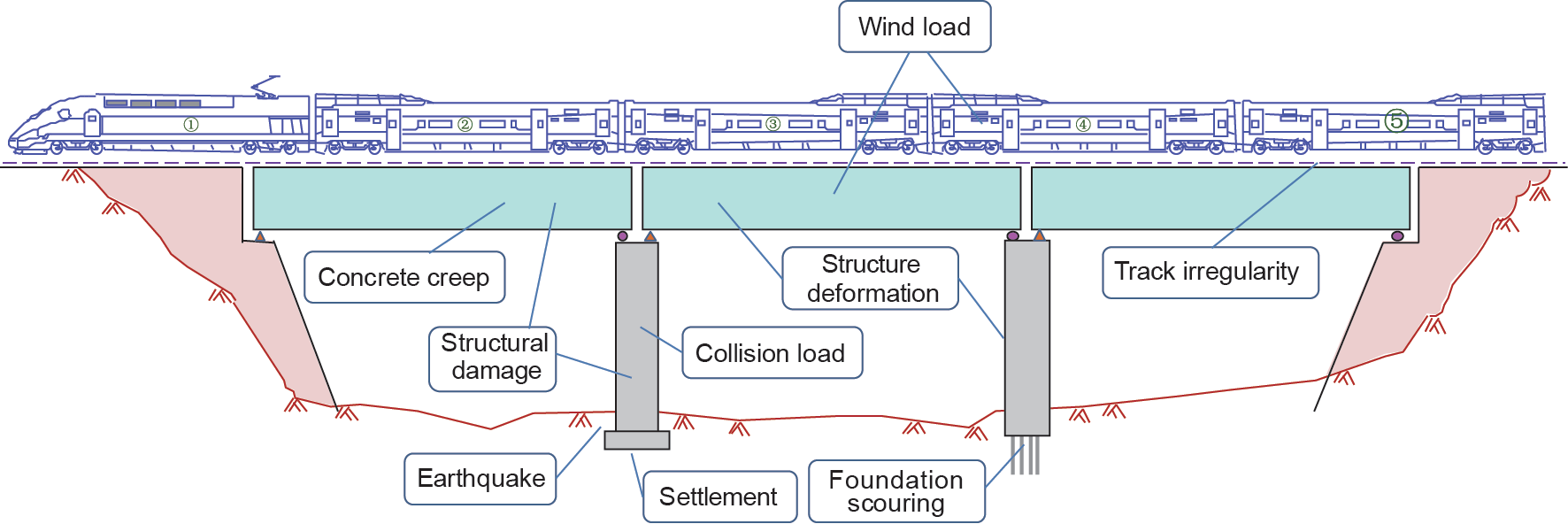
图2. 车桥耦合振动问题的研究内容。
1.3.1. 轨道不平顺
轨道不平顺为车桥耦合体系的主要激励源之一。由于车辆、桥梁之间存在耦合关系,因此车桥子系统之间的相互作用力既是轨道不平顺的函数,也是车辆和桥梁子系统运动状态Xv、Xb的函数,设轨道不平顺为i,则车桥耦合系统的运动方程[4-5]可表示为

尽管在数学形式上式(1)中的车辆与桥梁之间是相互独立的,但与式(2)联立后,车辆与桥梁两子系统之间即建立耦合关系。建立车辆子系统和桥梁子系统的动力学关系,即建立式(2)中Fvi及Fbi的数学表达形式,为车桥动力耦合分析的关键。这些数学表达式取决于轮轨关系假定及轨道不平顺i的数值。
1.3.2. 结构变形
由于混凝土徐变、温度作用及基础沉降引起的桥梁、线路结构的准静态变形,将引起桥上线路的几何形状的改变,线路结构的准静态变形可视为附加的轨道不平顺,与轨道不平顺共同作为车桥耦合体系的激励源[6–8]。设附加的轨道不平顺为ia,则式(2)改写为

1.3.3. 风荷载、撞击荷载

1.3.4. 结构损伤及基础冲刷
桥梁结构的损伤及基础冲刷在数学上均体现为桥梁子系统总体刚度矩阵的降低。结构损伤导致损伤部位单元截面或材料弹性模量的减小,基础冲刷导致墩底或桩侧约束刚度的下降。考虑结构损伤及基础冲刷的车桥耦合系统的运动方程[12–13]可表示为

式中,Kbd为发生劣化后桥梁子系统总体刚度矩阵的下降量。
1.3.5. 地震
对车桥耦合系统而言,地震可视为对桥梁子系统各地震输入点(指桥梁墩底、承台底或基础)施加一组已知时程[14–16]。一般情况下,各基础位置的地震响应并不完全一致,此为非一致地震激励问题。
在数学上,可认为是式(1)与这一组时程联立,求解得到地震作用下车桥系统的动力响应。地震作用下车桥耦合系统的运动方程可表示为

式中,Xs、 、
、 分别为各地震输入点的位移、速度、加速度;Tbs为从桥梁位移向量Xb到各地震输入点位移向量Xs的转换矩阵。
分别为各地震输入点的位移、速度、加速度;Tbs为从桥梁位移向量Xb到各地震输入点位移向量Xs的转换矩阵。
2. 车桥耦合系统分析方法
《2.1. 车辆模型》2.1. 车辆模型
每节车辆均为由车体、转向架、轮对以及弹簧-阻尼器悬挂装置组成的多自由度振动系统,见图3。
《图3》

图3.车辆单元模型。
车辆子系统模型中,各节车辆被视为无联系的独立体系。高速铁路车辆采用两组悬挂系统:轮对与转向架之间的弹簧和阻尼器为一系悬挂系统,转向架与车体之间的弹簧和阻尼器为二系悬挂系统。多数研究中均采用黏性阻尼,但由于车桥耦合系统采用时程积分方法求解,因此采用其他形式的阻尼也没问题。车辆子系统的质量、阻尼及刚度矩阵由刚体动力学方法求得,参见文献[1–5]。
《2.2. 桥梁模型》2.2. 桥梁模型
桥梁子系统方程由如下假定建立:
(1)桥上轨道和梁之间没有相对位移并忽略线路结构的弹性变形;
(2)桥面节点振型可由插值函数确定;
(3)忽略梁横截面的变形。
《2.3. 轮轨相互作用力》2.3. 轮轨相互作用力
轮轨关系假定为车桥动力耦合分析的关键所在。轮轨相互作用模型定义轮轨间相对运动、相互作用力之间的关系,是车辆子系统与桥梁子系统的联系。轮轨相互作用模型可分为以下两类:
(1)定义轮轨作用力为车轮与钢轨相对运动的函数,此类模型基于弹性力学或接触力学原理,例如,基于Hertz接触的轮轨法向弹性作用理论、基于Kalker线性蠕滑的轮轨切向蠕滑理论及其修正和简化形式;
(2)定义轮对运动为钢轨运动的函数,例如,轮轨垂向密贴假定及轮轨蛇行波假定。
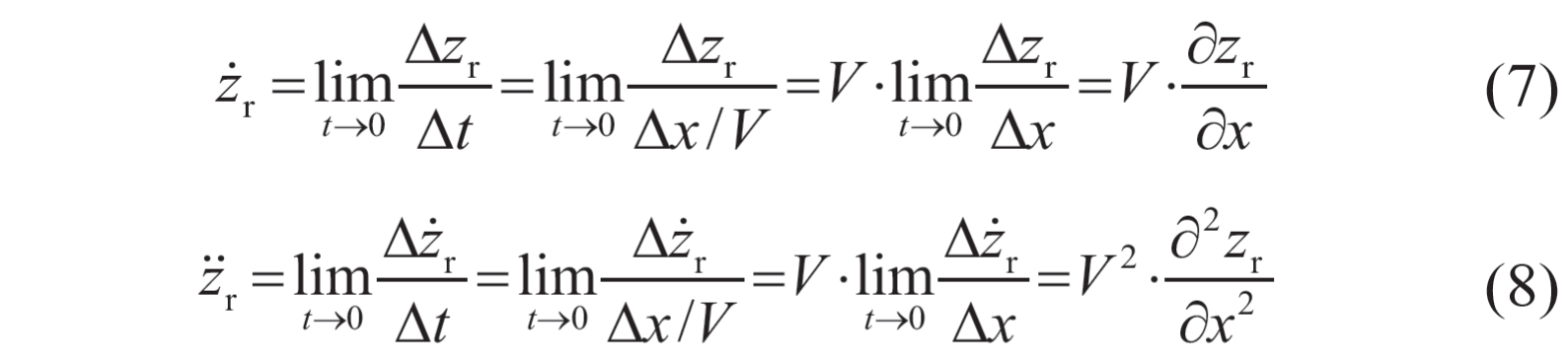
本文以轮轨垂向密贴假定和横向Kalker蠕滑理论定义轮轨关系。轮轨垂向密贴假定即认为轮对与钢轨竖向上具有相同的运动状态。
轮轨垂向密贴假定即假定轮轨间竖向无相对运动,因此轮轨间竖向相互作用力可由轮轨间该方向的相对运动状态确定。由此,轮对与钢轨具有相同的位移、速度和加速度。此时,轨道不平顺引起的轮对附加速度及附加加速度可由微分形式求得
Kalker(1967)提出了著名的线性蠕滑理论,该理论解决了具有椭圆接触区的三维稳态滚动接触问题。目前广泛应于横向轮轨关系的模拟中[2,4]。由Kalker线性蠕滑理论,轮轨之间的蠕滑力可表示为

式中,Fx、Fy分别为纵向及横向蠕滑力;Fψ为绕竖向蠕滑力矩;f11、f22、f33分别为纵向、横向及竖向蠕滑系数,均为轮轨相对运动关系、轮轨踏面形状及材料弹性模量的函数;ξx、ξy、ξψ分别为x方向、y方向和绕竖向的蠕滑率。
《2.4. 车桥耦合动力方程的求解方法》2.4. 车桥耦合动力方程的求解方法
本文采用全过程迭代法求解车桥动力耦合方程。此方法的计算流程见图4,简述如下:
第一步,设桥梁子系统为刚性,使用轨道不平顺系统作为激励,求解车辆子系统,得到所有轮对的轮轨力时程;
第二步,将前一迭代过程(或第一步)得到的轮轨力时程施加于桥梁,求解桥梁子系统,得到桥面运动状态时程;第三步,将第二步中得到的桥面运动状态与轨道不平顺叠加作为系统激励,求解车辆子系统,得到所有轮对新的轮轨力时程;
第四步,计算第三步中得到的轮轨力时程同前一迭代过程(或第一步)中轮轨力时程的误差,若该误差满足收敛判断,则全部计算完成,否则进入下一迭代过程,重新进行第二步至第四步的计算。
全过程迭代法的主要优点是可采用任何一种商业有限元软件求解桥梁子系统方程,这使得计算过程更简便、准确。对于多数情况,仅通过少数几次收敛计算即可得到车桥耦合系统的收敛解。当系统高频振动成分较多、难以获得收敛解时,此问题可部分地通过减小时间步长或增大收敛判断阈值来解决,亦可采用数值耗散方法来抑制振动中的高频成分。
《图4》
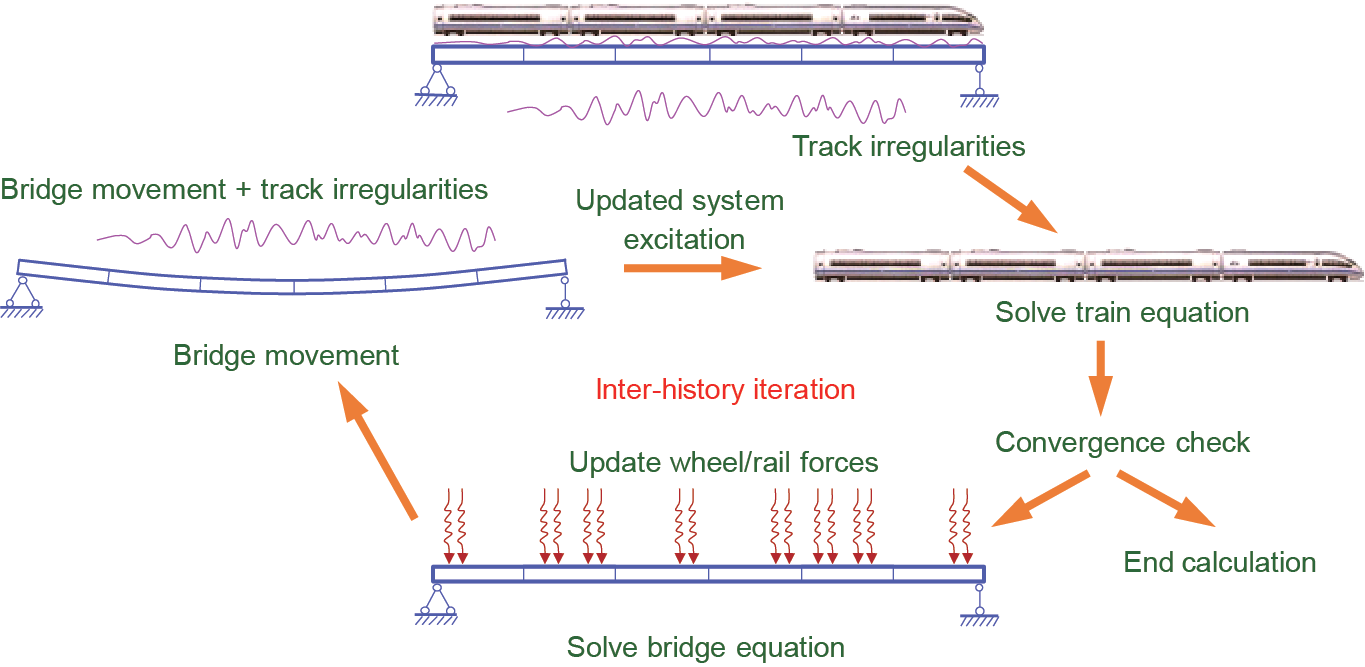
图4. 全过程迭代法流程图。
《3. 算例》3. 算例
本节研究CRH380BL高速列车通过按我国标准设计的桥梁的动力响应。桥梁考虑10跨连续布置的31.5m双线预应力混凝土简支梁,如图5、图6所示。每孔梁全长32.6m、梁缝0.1m,梁顶宽12m、底宽5.5m,梁高3.05m。所研究区段桥墩均按直径4m、墩高15m考虑。桥跨结构的首阶竖向、横向及扭转频率依次为6.40Hz、17.68Hz及18.96Hz。CRH380BL高速列车含16节车辆,两组MTMTTMTM编组,动车、拖车轴重均为152kN,轮位见图7。计算中以德国低干扰谱转换的时域样本为系统激励,其空间曲线如图8所示。
《图5》

图5. 算例桥梁示意图(单位:m)。
《图6》

图6. 桥梁横截面(单位:mm)。
《图7》

图7. CRH380BL列车编组(单位:m)。
《图8》
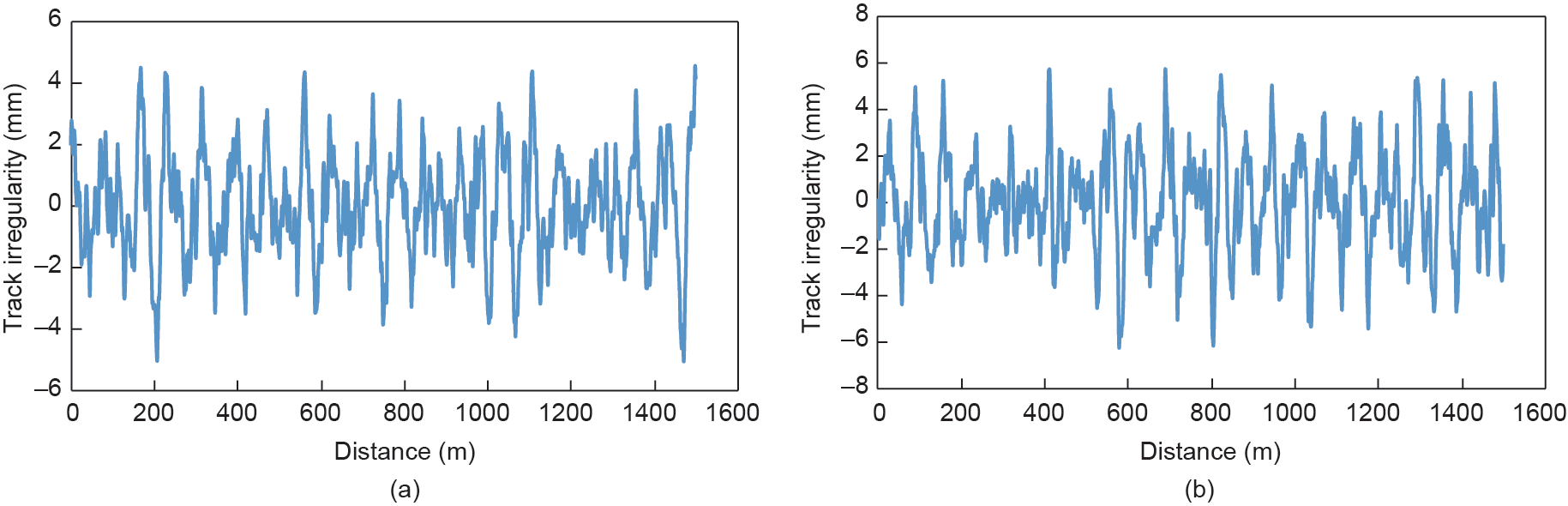
图8. 德国低干扰谱转换的时域样本平顺。(a)高低不平顺;(b)方向不平顺。
由上述输入信息,计算得到车速200~400km·h–1范围内,车辆与桥梁子系统的动力响应。第6跨跨中动位移时程、第6跨跨中加速度时程、第1轮对轮轨力时程、第1节车体加速度时程分别见图9至图12。
《图9》
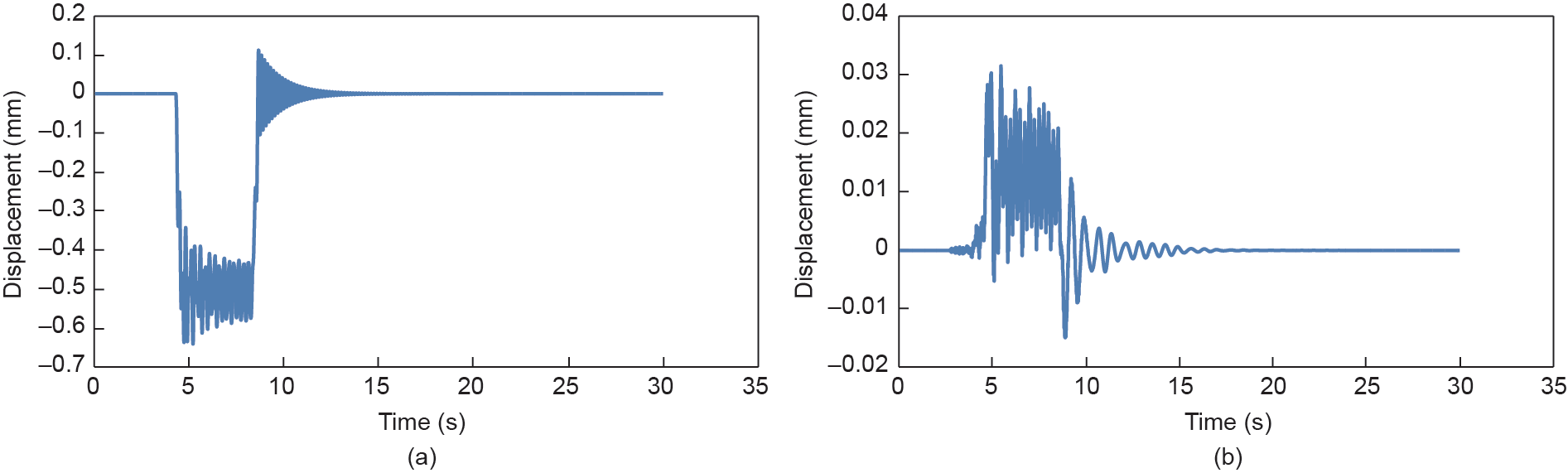
图9. 第6跨跨中动位移。(a)垂向动位移;(b)横向动位移。
《图10》

图10. 第6跨跨中加速度。(a)竖向加速度;(b)横向加速度。
《图11》

图11. 第1轮对轮轨力。(a)垂向轮轨力;(b)横向轮轨力。
《图12》
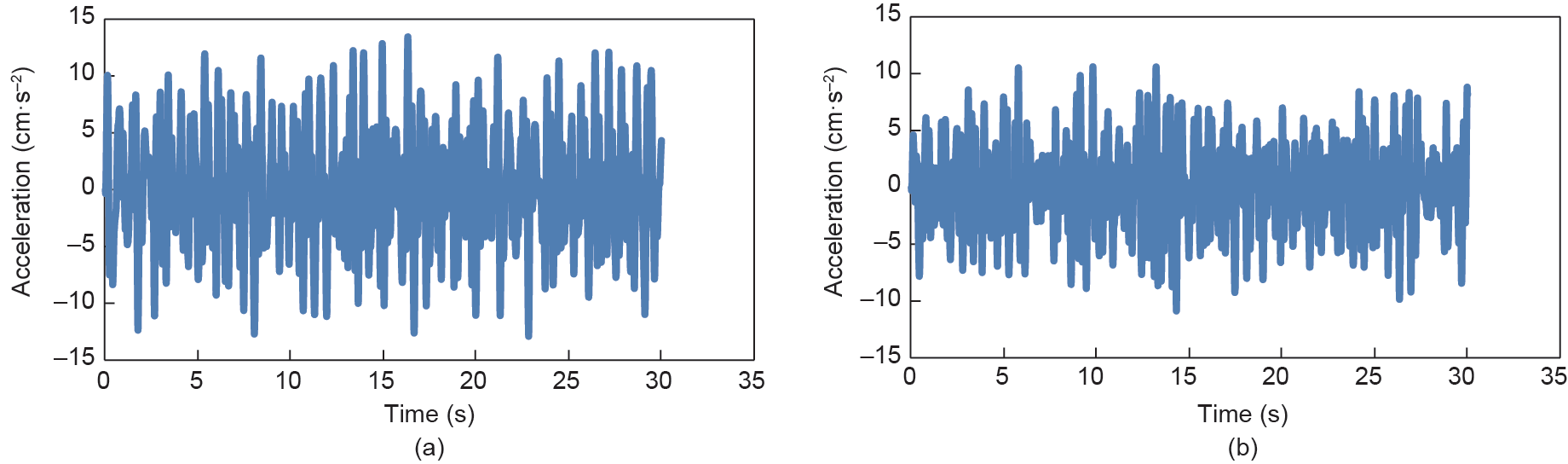
图12. 第1节车辆车体加速度。(a)竖向加速度;(b)横向加速度。
图13至图16为上述车速范围内的关键动力学指标随车速的变化规律,其中,图15中实线表示最大轮轨力,虚线表示最小轮轨力。
《图13》

图13. 桥梁跨中动位移。(a)垂向动位移;(b)横向动位移。
《图14》
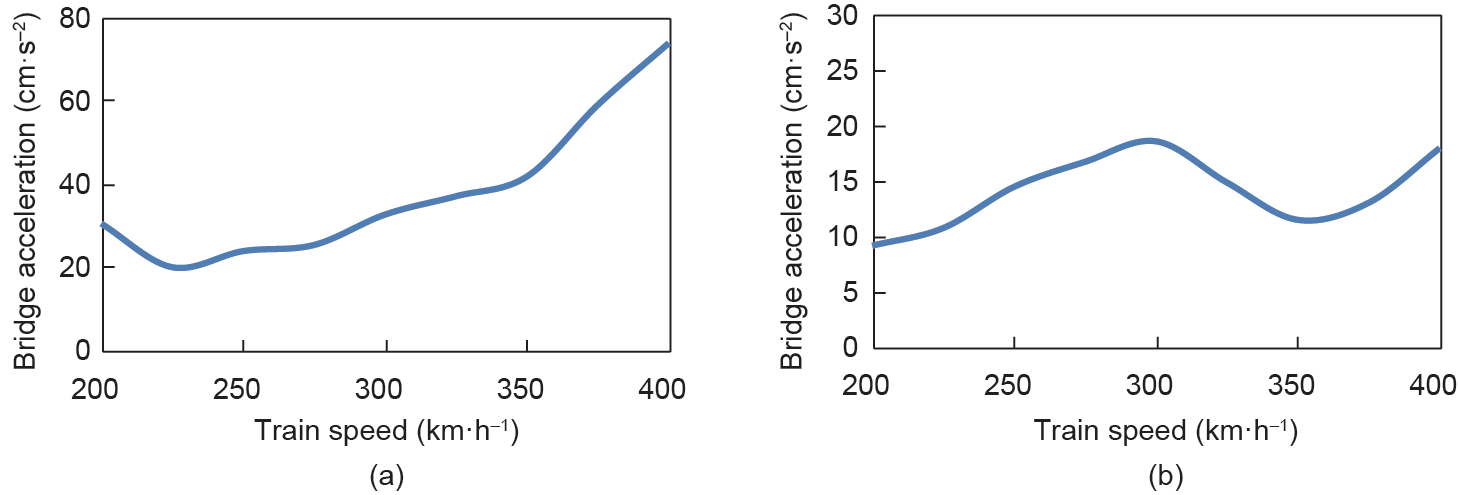
图14. 桥梁跨中加速度。(a)竖向加速度;(b)横向加速度。
《图15》
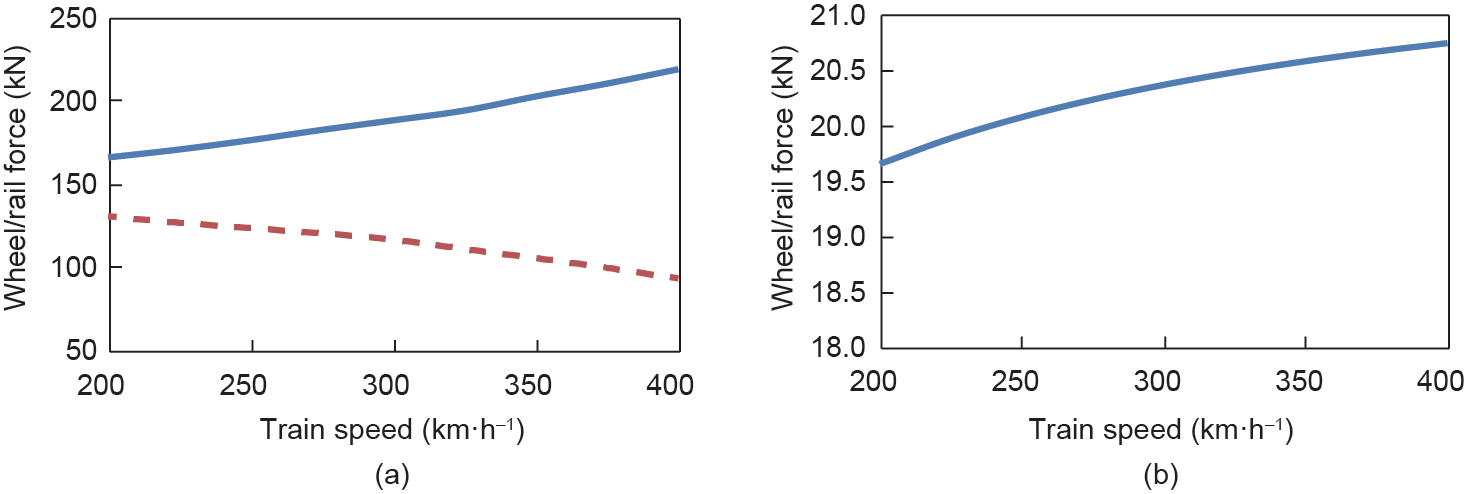
图15. 轮轨力。(a)垂向轮轨力;(b)横向轮轨力
《图16》

图16. 车体加速度。(a)竖向加速度;(b)横向加速度
由图13至图16可知,除垂向、横向轮轨力车速单调变化外,其余各指标均呈较为复杂的变化规律。车速介于200~250 km·h–1之间时,仅车辆与桥梁子系统的横向加速度随车速的增加而增加,其余各指标则随车速的增加而降低。然而,随着车速的增加,车速稍高于250 km·h–1时出现车辆与桥梁子系统的垂向振动峰值,350 km·h–1时的横向振动则普遍小于250 km·h–1时的指标,此现象以车体横向加速度指标尤为显著。综上,列车运行速度介于200~250 km·h–1之间时,存在垂向、横向振动峰值,应加以关注。
《4. 结论》
4. 结论
本文的车辆子系统模型以刚体动力学方法建立,桥梁子系统模型以有限元方法建立,竖向与横向轮轨关系分别以轮轨密贴假定和Kalker线性蠕滑理论定义。车桥耦合动力方程以全过程迭代法求解。作为算例,计算了CRH380BL高速列车通过按我国标准设计的桥梁的动力响应。计算结果表明,由于车桥系统间共振现象的存在,各动力指标均呈较为复杂的变化规律。列车运行速度介于200~250 km·h–1之间时,存在垂向、横向振动峰值,应加以关注。
《致谢》
致谢
本文研究得到“973计划”项目(编号:2013CB036203)、“111”引智计划项目(编号B13002)、国家自然科学基金项目(编号:U1434205、51338001)资助,深表感谢。
《Compliance with ethics guidelines 》
Compliance with ethics guidelines
Nan Zhang, Yuan Tian, and He Xia declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




