
2018, Volume 4, Issue 5
Engineering >> 2018, Volume 4, Issue 5 doi: 10.1016/j.eng.2018.07.008
A High-Precision US-Guided Robot-Assisted HIFU Treatment System for Breast Cancer
a Graduate School of Engineering, The University of Tokyo, Tokyo 113-8656, Japan
b Graduate School of Medicine, The University of Tokyo, Tokyo 113-8654, Japan
Next Previous
Abstract
Breast cancer is the most commonly diagnosed cancer in women. A strong treatment candidate is high-intensity focused ultrasound (HIFU), a non-invasive therapeutic method that has already demonstrated its promise. To improve the precision and lower the cost of HIFU treatment, our group has developed an ultrasound (US)-guided, five-degree-of-freedom (DOF), robot-assisted HIFU system. We constructed a fully functional prototype enabling easy three-dimensional (3D) US image reconstruction, target segmentation, treatment path generation, and automatic HIFU irradiation. The position was calibrated using a wire phantom and the coagulated area was assessed on heterogeneous tissue phantoms. Under the US guidance, the centroids of the HIFU-ablated area deviated by less than 2 mm from the planned treatment region. The overshoot around the planned region was well below the tolerance of clinical usage. Our system is considered to be sufficiently accurate for breast cancer treatment.
Keywords
HIFU ; Breast cancer ; US-guided navigation ; Medical robotics ; Accuracy evaluation
SupplementaryMaterials
Figures

Fig.1

Fig.2
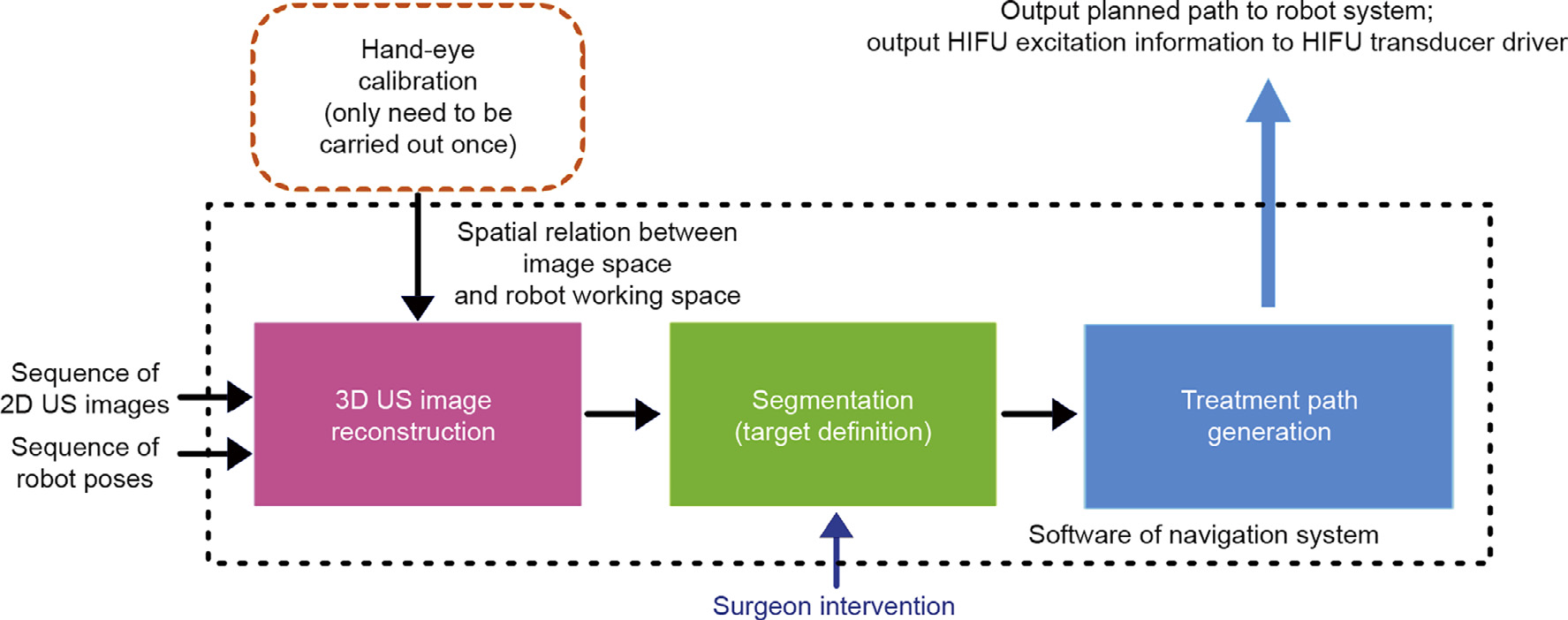
Fig.3

Fig.4

Fig.5

Fig.6
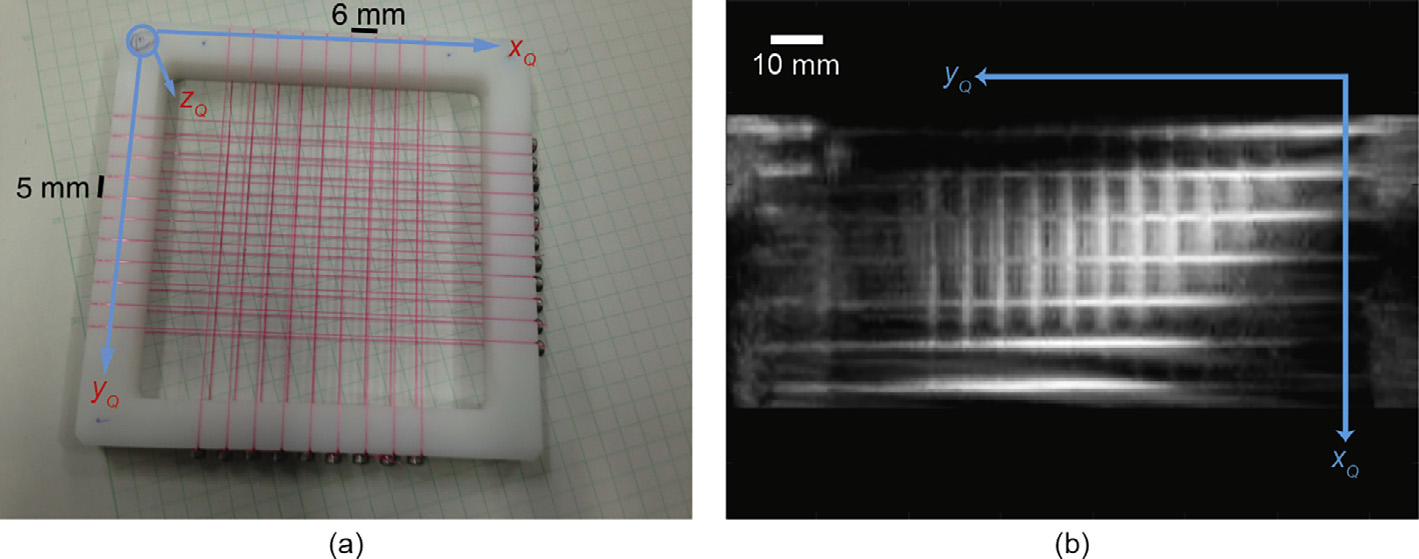
Fig.7

Fig.8

Fig.9
Fig.10
References
[ 1 ] American Cancer Society, Inc. Global cancer facts & figures. 3rd ed. Atlanta: American Cancer Society, Inc.; 2015.
[ 2 ] Japanese Breast Cancer Society. Report of clinical statistical studies on registrated mammary cancer patients in Japan. Tokyo: Japanese Breast Cancer Society; 2011. Japanese.
[ 3 ] Kennedy JE. High-intensity focused ultrasound in the treatment of solid tumours. Nat Rev Cancer 2005;5(4):321–7. link1
[ 4 ] Smith NB, Temkin JM, Shapiro F, Hynynen K. Thermal effects of focused ultrasound energy on bone tissue. Ultrasound Med Biol 2001;27 (10):1427–33. link1
[ 5 ] Furusawa H. High-intensity focused ultrasound for breast cancer: MR-guided focused ultrasound surgery as local treatment. Choonpa Igaku 2014;41 (5):705–15. Japanese.
[ 6 ] Ishihara Y, Calderon A, Watanabe H, Okamoto K, Suzuki Y, Kuroda K, et al. A precise and fast temperature mapping using water proton chemical shift. Magn Reson Med 1995;34(6):814–23. link1
[ 7 ] Sherar MD, Moriarty JA, Kolios MC, Chen JC, Peters RD, Ang LC, et al. Comparison of thermal damage calculated using magnetic resonance thermometry, with magnetic resonance imaging post-treatment and histology, after interstitial microwave thermal therapy of rabbit brain. Phys Med Biol 2000;45(12):3563–76. link1
[ 8 ] Yang B, Tan UX, McMillan AB, Gullapalli R, Desai JP. Design and control of a 1- DOF MRI compatible pneumatically actuated robot with long transmission lines. IEEE ASME Trans Mechatron 2011;16(6):1040–8. link1
[ 9 ] Culjat MO, Goldenberg D, Tewari P, Singh RS. A review of tissue substitutes for ultrasound imaging. Ultrasound Med Biol 2010;36(6):861–73. link1
[10] Yonetsuji T, Ando T, Wang J, Sakuma I. A novel high intensity focused ultrasound robotic system for breast cancer treatment. In: Proceedings of MICCAI 2013: 16th International Conference on Medical Image Computing and Computer-Assisted Intervention; 2013 Sep 22–26; Nagoya, Japan; 2013. p. 388–95. link1
[11] Comeau RM, Fenster A, Peters TM. Integrated MR and ultrasound imaging for improved image guidance in neurosurgery. Proc SPIE 1998;3338:747–54. link1
[12] Pagoulatos N, Haynor DR, Kim Y. A fast calibration method for 3-D tracking of ultrasound images using a spatial localizer. Ultrasound Med Biol 2001;27 (9):1219–29. link1
[13] Fenster A, Bax J, Neshat H, Kakani N, Romagnoli C. 3D Ultrasound imaging in image-guided intervention. In: Proceedings of 2014 36th Annual International Conference of the IEEE; 2014 Aug 26–30; Chicago, IL, USA. New York: IEEE; 2013 link1
[14] Kim C, Chang D, Petrisor D, Chirikjian G, Han M, Stoianovici D. Ultrasound probe and needle-guide calibration for robotic ultrasound scanning and needle targeting. IEEE Trans Biomed Eng 2013;60(6):1728–34. link1
[15] Solberg OV, Lindseth F, Torp H, Blake RE, Nagelhus Hernes TA. Freehand 3D ultrasound reconstruction algorithms—a review. Ultrasound Med Biol 2007;33 (7):991–1009. link1
[16] Mortensen EN, Barrett WA. Intelligent scissors for image composition. In: Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques; 1995 Aug 6–11; New York, NY, USA. New York: ACM; 1995. p. 191–8. link1
[17] Tang T, Azuma T, Itani K, Iwahashi T, Matsui K, Fujiwara K, et al. A new method for absolute accuracy evaluation of a US-guided HIFU system with heterogeneous phantom. In: Proceedings of 2016 IEEE International Conference; 2016 Sep 18–21; Tours, France. New York: IEEE; 2016. p. 1–4. link1
[18] Zhou YF. High intensity focused ultrasound in clinical tumor ablation. World J Clin Oncol 2011;2(1):8–27. link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




