
《1. Introduction》
Since the exploitation of the earth’s resources has a long history, coal and mineral resources at shallow depths have gradually become exhausted, and the exploitation of coal and mineral resources continues ever deeper into the earth. At present, deep mining at 1000 m is normal; the depth of coal mines has reached 1500 m, the depth of geothermal exploitation has reached more than 5000 m, the depth of non-ferrous metal mines has reached around 4500 m, and the depth of oil and gas exploitation has reached around 7500 m. Deep mining will become common in the future. Coal mining in Poland, Germany, Britain, Japan, and France had reached deeper than 1000 m as early as the 1980s, and China currently has 47 coal mines more than 1000 m deep [1,2]. In the case of metal mines, according to incomplete statistics, there were at least 80 mines more than 1000 m deep prior to 1996, mostly located in South Africa, Canada, the United States, India, Australia, Russia, and Poland. The averagedepth of metal mines in South Africa has reached 2000 m, and the Western Deep Level gold mine has reached 4800 m [3].
Deep rock mass is characterized by high in situ stress, high temperature, and high water pressure. Compared with shallow resource extraction, deep mining may be associated with disasters such as rockbursts, large-scale caving, and large inrush of mixed coal, gas, and water. These events are often complex in nature and difficult to forecast and control. The characteristics of the rock mass and the boundary conditions in deep mines are the primary causes of disasters in deep mining [2]. For example, when the mining depth reaches about 1000 m, the in situ stress caused by the overburden, tectonic features, and mining activities can cause stress concentration, resulting in damage to and failure of the surrounding rock masses [4]. Under high stress, as the accumulated deformation energy is more prominent, accidents may occur more frequently.
Under conditions of high stress, high temperature, and high water pressure, the disturbance generated by mining activities can lead to the sudden and unpredictable destruction of the rock mass, which is manifested by a large range of instability and collapse [5]. In addition, the deformation and failure characteristics of rock masses at great depths often exhibit strong time-dependent characteristics [6]. The disturbed stressand time-dependence of deep mining engineering can result in the occurrence of disasters that are very difficult to forecast.
Emerging problems of rock mechanics and mining engineering have been studied for deep mining. Most of the current studies focus on the zonal disintegration of deep surrounding rock [7–10], large squeezing failure [11], transformation of brittleness to ductility [12], energy characteristics of dynamic failure in deep mining [13], visualization of stress fields [14,15], and rock strata deformation and movement induced by deep mining [1,16]. Although the results of these studies have revealed some mechanical characteristics of deep mining, some of the deep-mining-related theories, techniques, and methods are still at the primary stage. Xie [2] considered the reason for this to be the limitations of current theories of rock mechanics, because such theories are based on the mechanics of materials and are relatively unrelated to the depth in question and to field engineering activities. Moreover, new theories and techniques for deep mining are necessary, taking in situ and mining-induced characteristics into account.
《2.Rock support for deep mines》
2.Rock support for deep mines
In situ stress is the dominant factor influencing underground deformation and failure in mining and other underground engineering. As the mining depth increases, the influence of in situ stress on the stability and failure of the surrounding rock mass becomes more obvious, and the selection of rock support techniques becomes more vital.
He et al. [4] developed asymmetric coupling support technology for roadways in soft rocks, including controlling technologies for floor heave, double controls on the crossing points for large roadway sections with anchors, and intensive design technology for pumping station chambers. These technologies have been successfully applied to site support works [17]. According to the site test results, Niu et al. [18] suggested the adoption of a rigidityand flexibility-coupled dynamic reinforcement technique by applying initial flexible support to stabilize the broken surrounding rocks in the early stage, using reserved deformation for the unloading of high stresses in the middle stage, and adopting a high-strength and high-stiffness support for the whole section in the late stage, in order to resist creep deformation. He et al. [17] further developed a designated experimental system for rockburst in deep mining. In order to resolve the failure of conventional support materials in large-deformational surrounding rock, an energy-absorbing bolt with large elongation and constant resistance was developed, as shown in Fig. 1(a) and Fig. 1(b) [17]. The bolt can resist the large squeeze of rock by counteracting the shock-produced deformation energy through the large deformation of the bolt. The pull-out force constantly ranges from 120 kN to 200 kN, and the deformation capacity is 0.5–1 m. Li et al. [19] developed an energy-absorbing rock-support device, the D-bolt (Fig. 1(c)), for burst-prone and squeezed surrounding rocks. The average impact load is 200–300 kN for a 200 mm D-bolt, and the cumulative dynamic energy absorption of the bolt is 47 kJ·m−1.
《Fig. 1》

Fig. 1. (a, b) Energy-absorbing bolt with large elongation and constant resistance and working principles [17]; (c) energy-absorbing D-bolt [19].
《3.Intelligent mining》
3.Intelligent mining
Digital mining originated with the mine/mining geographic information system as the inevitable outcome of the information age and knowledge economy [20]. The goal of digital mining is to promote the transformation of mine information; support automated mining and intelligent mining; ensure safe, efficient, green, and sustainable mining; and achieve scientific mining. Digital mine construction is a gradual process and requires complex system engineering [20].
The development of automated mining technology began in the mid-1980s. In Canada, Noranda Inc. has developed a variety of automated equipment, including load-haul-dump (LHD) machines, an optical navigation system, and an LHD remote control system, to meet the needs of underground hard rock mining automation [21]. In 1994, the Australian Commonwealth Scientific and Industrial Research Organization (CSIRO) launched the Mining Robot Research Project. CSIRO researchers developed an open-pit bucket cruise system, an accurate unloading model, and an underground metal mine LHD automatic control system. Norway Dyno Industrier ASA, Canada INCO Limited, and Finland Tamrock Corporation then launched an investment of $22.7 million in a mining automation program to improve labor productivity and reduce operating costs. Later, Sweden developed the Grountecknik 2000 strategic plan for mine automation. Today, unmanned working-faces and unmanned mines based on fully automated mining/unmanned mining processes have become important fields of study [20].
According to Wu et al. [20], the new task of a digital coal mine is to establish coal mines and real-time access to digital mine integration platforms in order to construct a multidimensional and dynamic coal mine virtual reality system. Four main directions were determined for digital mining in the new situation of deep mining: ① a digital mine integration platform; ② a mining simulation system;③ underground positioning and navigation technology; and ④ mining environmental intelligence perception.
《4.Enhanced continuous mining and tunnel-boring machine mining》
4.Enhanced continuous mining and tunnel-boring machine mining
Gu and Li [22] suggested that deep metal mining should adopt the technologies of enhanced continuous mining and high in situ stress-induced fragmentation. However, four critical issues remain for deep mining in hard rocks: ① characterization of and methods to understand high-stress fields and geological structures in deep mining; ② knowledge of full-block fracturing for hard rock under high in situ stresses; ③ support measures to control rockburst at high temperatures; and ④ knowledge of the flow and coupling of the integrated solid-gas-liquid medium in infiltration mining for low-grade mineral deposits.
The use of tunnel-boring machines (TBMs) in mining applications is difficult, due to the complex heterogeneity of the target rock mass. Over 70% of TBM failure in mines is due to geology-related problems [23]. In recent years, there has been an increase in the use of TBMs and in the average drill length for tunneling in hard rock mines. However, several limitations still restrict the use of TBMs in mining applications. Spalling or rockburst due to stress redistribution in highly stressed rock is a major drawback during TBM cutting in hard rock mines, and can affect safety and tunnel support installation. This issue has been alleviated in the recent Jinping II hydropower plant project by monitoring microseismic activity and tunnel deformation in order to effectively predict and avoid rockburst in tunneling. Highly fractured and blocky rock masses are another factor inhibiting the use of TBM cutters in a mining application. Loose chunks of rock are known to jam and damage front transfer chutes and cutter mounting buckets. Therefore, to extend the application of TBMs in deep mining, TBMs need modifications such as impact bars to avoid damage to cutters, mucking buckets, and belt conveyors.
In addition to the problems encountered in hard rock mines, other complications associated with water inrush and methane explosions affect the use of TBM cutters in coal mines. A novel integrated drilling-slotting technique has been implemented in the Pingdingshan coalfield in China for coal-methane co-exploitation; this technique enhances both coal and methane recovery, while reducing the possibility of methane explosions. Groundwater borne in adverse geological bodies such as faults and karst caves can cause coal mine collapse.
《5.Fluidized mining》
5.Fluidized mining
Xie et al. [24,25] proposed that there exists a theoretical limit on mining depth by traditional methods. It is estimated theoretically that all the currently available mining methods will become obsolete once the depth of underground solid mineral resources exceeds 6000 m. Therefore, to realize the development and utilization of mineral resources at great depths, disruptive innovations in development theory and technology must be made. For this purpose, Xie et al. [25] proposed a theoretical and technical conceptualization of the fluidized mining of deep underground solid mineral resources (Fig. 2). Based on a mining mode similar to a TBM, the idea is to achieve in situ, real-time, and integrated utilization of deep underground solid mineral resources through mining, sorting, refining, backfilling, power generation, and gasification of solid resources, thus converting the resources into gas, liquid, or a mixture of gas/ liquid/solid substances. As a result, future coal mines will no longer have workers going down into the mines, coal being mined up, coal refuse being piled up into mountains, or dust obscuring the air; rather, power and energy transmission will be clean, safe, intelligent, environmentally compatible, and eco-friendly.
《Fig. 2》
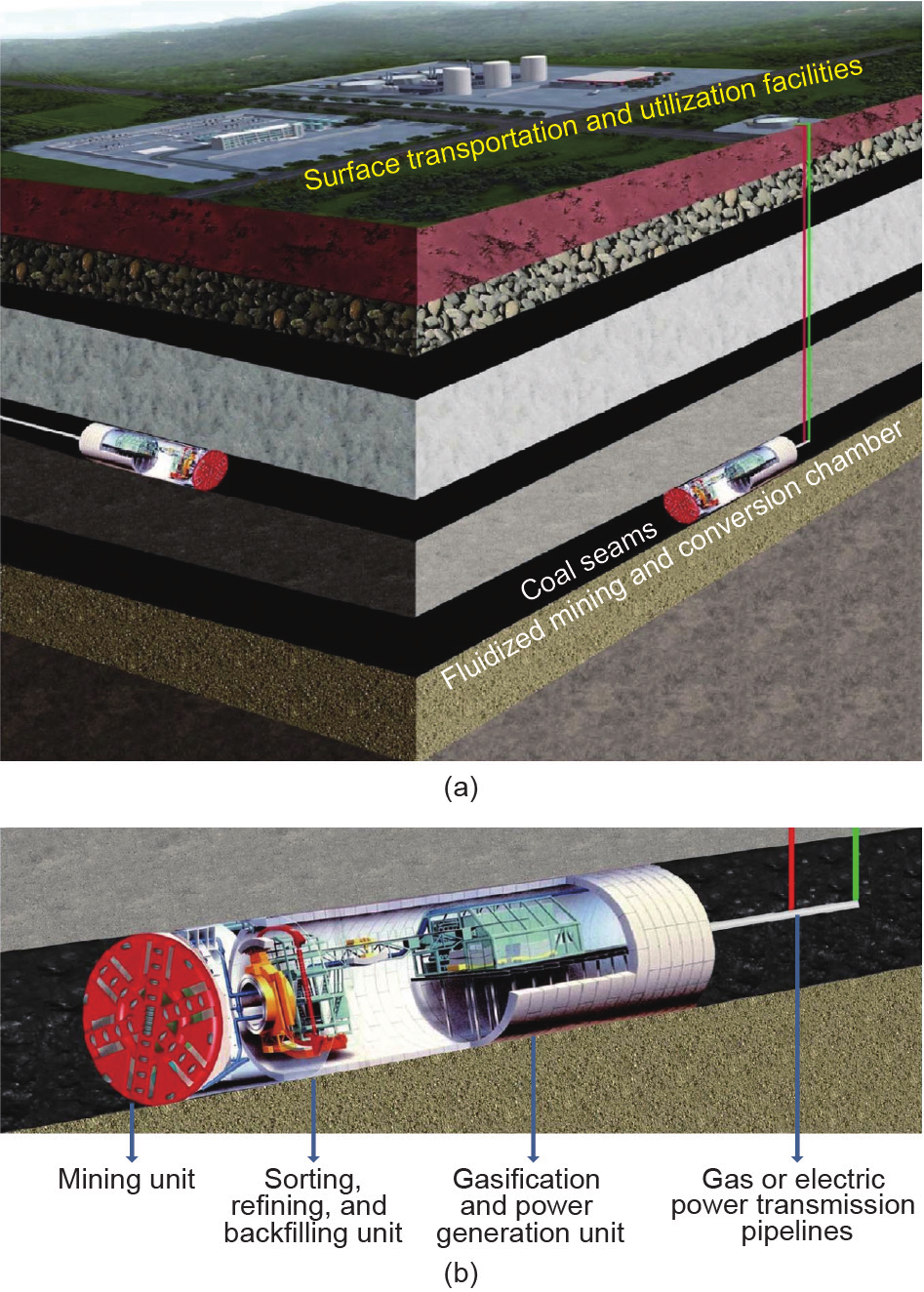
Fig. 2. A conceptual illustration of fluidized mining of deep underground solid mineral resources [25]. (a) Mining model; (b) fluidized mining and conversion chamber.
For coal mining, the fluidized mining concept includes thefollowing five main procedures: ① unmanned mining, ② automated sorting, ③ fluidized conversion of solid mineral resources, ④ controlled backfilling, and ⑤ power transmission, intelligent electricity control, and electricity storage. For metal mining, the fluidized mining concept includes the following three steps: ① unmanned mining, ② fluidized conversion of solid mineral resources, and③ controlled backfilling [24].
There are four technologies to achieve the fluidized mining of deep underground solid mineral resources [24]: ① the conversion of solid mineral resources into gases, such as the underground gasification of coal; ② the conversion of solid mineral resources into liquid fuels, such as the underground liquefaction of coal and the high-temperature biological and chemical transformation of coal; ③ the conversion of solid mineral resources into mixtures, such as explosive coal dust and water-coal slurry; and ④ the in situ conversion of solid mineral resources into electrical power, such as the in situ underground electrification of coal. Fluidized mining is indeed a disruptive innovation in mining technologies, particularly in regards to future deep mining.
《6.Advanced simulation facilities for deep mining》
6.Advanced simulation facilities for deep mining
Over the last two decades, tremendous development has occurred in laboratory experimental facilities and in numerical software around the world that can simulate real rock behavior under in situ stress conditions. For example, in Australia, the CSIRO rock mechanics laboratory has facilities that can simulate real rock behavior in deep mining using the latest custom-made triaxial rigs, core-flooding facilities, and in-house numerical tools. In the UK, the University of Portsmouth has developed mesoscale rock deformation machines to identify the failure mechanics of rock in seismic environments; at Imperial College London, the Department of Earth Science and Engineering has reservoir-condition core-flooding facilities with X-ray imaging capabilities, gas-and-liquid mass spectroscopy, chemical detection facilities, and advanced poreto reservoir-scale in-house modeling tools; and the Department of Earth Sciences at the University of Cambridge has facilities that can simulate microstructural and geochemical characteristics of rocks, using optical, electron, infrared, and nuclear magnetic spectroscopy, and X-ray diffraction (XRD) analysis. In the United States, the University of Minnesota has various closed-loop, servo-hydraulic load frames for uniaxial, biaxial (plane strain), and conventional triaxial compression testing and digital image correlation and acoustic emission (AE) technologies. In Canada, the Rock Fracture Dynamics Laboratory at the University of Toronto has a wide range of stateof-the-art equipment, including a polyaxial servo-controlled rock deformation system and true triaxial systems with coverage of AE and three-dimensional (3D) velocity.
Among the various worldwide centers of excellence in geomechanics, the Deep Earth Energy Laboratory at Monash University in Australia has state-of-the-art research facilities to conduct advanced research on rock characterization and fragmentation (3GDeep; http://www.3gdeep.com). Mesoscale equipment includes custom-made high-pressure, high-temperature advanced triaxial rigs. Macroscale equipment is represented by advanced core flooding and shearing devices, a high-pressure triaxial rig, and a high-pressure hydro-mechanical testing chamber, along with a three-dimensionally compressed and monitored Hopkinson bar for rock behavior testing during the fracturing process. Microscale equipment includes an X-ray microscopy facility for 3D contrast imaging, computerized tomography (CT) scanning, scanning electron microscopy (SEM), and XRD.
These experimental installations are complemented by finite element method (FEM)/finite difference method (FDM)/particle flow code (PFC)-based modeling tools. 3GDeep employs comprehensive four-stage experimental and numerical modeling regimes (Fig. 3) to capture the whole process from the microscale to the reservoir scale, in order to understand microscale observations (including actual fragmentation, leaching, fluid-flow behavior, available pore areas, and tortuosity in fluid flow through pore structures) in their context, and the orebody/reservoir response and its time-dependent impact on the surrounding environment. There is capability at four scaling phases: ① microscale: 0.03 µm–20 mm; ② mesoscale:20–100 mm; ③ macroscale: 100–1000 mm; and ④ reservoir scale: 1000 m. Studying the relations among these four scales will assist in capturing the essential geological characteristics needed for a comprehensive reservoir-scale model in real field conditions.
《Fig. 3》
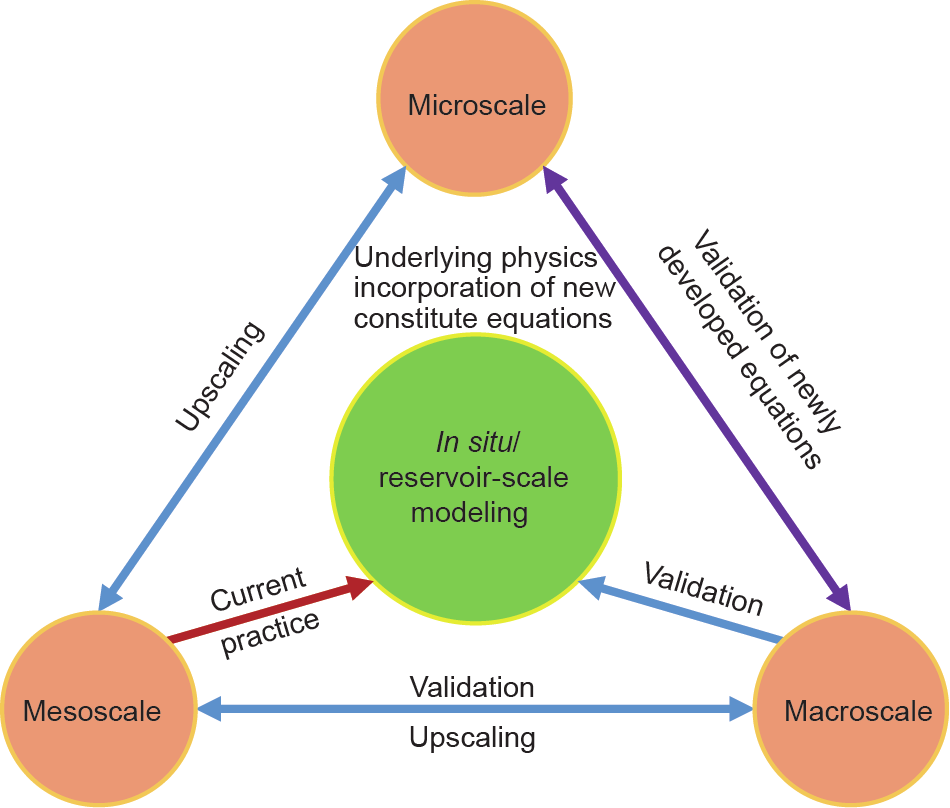
Fig. 3. A unique modeling approach, 3GDeep, developed at Monash University.
Of these facilities, the macroscale triaxial (Fig. 4(a)) and true triaxial rigs (Fig. 4(b)) are particularly important for the conducting of reliable rock fragmentation testing, using unconventionally large samples for more realistic rock fragmentation testing under the high pressures and temperatures that are typical of field conditions. The macroscale triaxial rig is capable of performing mechanical tests on rock samples up to 500 mm diameter, which is around two orders of magnitude larger than what can be tested with conventional advanced triaxial equipment, by the application of deviatoric stress to failure. The device is capable of simulating multiphase (liquid and gas) fluid flow through the sample, using fluid pressures of up to 25 MPa. Confining pressure can be applied at pressures up to 70 MPa and the cell can be heated to temperatures up to 100 °C, in order to simulate ground conditions (pressure and temperature) at depths in excess of 2.5 km. The rig is fitted with state-of-the-art controls and measurement equipment for continuously monitoring axial load and displacement; confining pressure and radial deformation; cell temperature, (gas and liquid) injection pressures, and outlet (gas and liquid) flow rates; and P-wave and S-wave transmission and acoustic energy generation.
《Fig. 4》

Fig. 4. (a) Macroscale triaxial and (b) true triaxial rigs at the 3GDeep research laboratory, Monash University.
The macroscale true triaxial rig is the largest of its type in Australia and possibly the world, and is capable of testing 750 mm-sided cubic samples with maximum triaxial stresses of 350 MPa, at temperatures up to 400 °C and fluid-injection pressures up to 350 MPa. The equipment has ports and sensors to measure the injection pressures, strains, volume changes, temperatures, and pore pressures of different fluid phases; P-wave and S-wave measurements; and AEs. The testing of such large samples under the equivalent of actual field conditions, by applying different intermediate principal compressive stresses, minor principal stresses, and major principal stresses, can in effect bring real field rock-blasting and fragmentation processes into the laboratory.
《7.Concluding remarks》
7.Concluding remarks
This short review paper presents the current status of deep mining in the world, and highlights some of the newest technological achievements and opportunities. It also addresses some technical geomechanical issues associated with deep mining.
Some of the current challenges, advances, and prospective issues in deep mining can be summarized as follows:
(1)Deep mining will become common in the future as coal and mineral resources at shallow depths gradually become exhausted. Progress is restricted and influenced by the advancement of rock mechanics and machine technologies. New theories and techniques are therefore necessary for deep mining, particularly considering the high in situ and mining-induced stresses and other boundary conditions that are found at great depths.
(2)Some control measures have been developed and applied for deep mining disasters such as surrounding rock deformation, rockburst, and the inrush of mixed coal-gas and water. However, the development of critical techniques for deep mining, such as monitoring and control techniques for mining-induced rock deformation, safety, the green mining of deep coal mines, and the collaborative mining of deep metal mines, is still in progress.
(3)With the rapid development of modern technologies, many critical problems restricting the progress of deep mining will be conquered, either independently or by the combination of intelligent mining, enhanced continuous mining for metal mines, and fluidized mining of deep coal resources, all of which represent the dominant approaches to deep mining in the future. Deep mining is transitioning toward being fully automated, intelligent, and mechanized.
(4)Novel mining technologies are being developed to identify and exploit previously unattainable resources in order to meet the rising global demand. Seabed mining that specifically targets seafloor massive sulfide deposits, iron-manganese crusts, and metallic nodules requires new approaches to material recovery.
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Pathegama G. Ranjith, Jian Zhao, Minghe Ju, Radhika V. S. De Silva, Tharaka D. Rathnaweera, and Adheesha K. M. S. Bandara declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




