
《1. Introduction》
1. Introduction
In recent years, the automation level of autonomous vehicles (AVs) has been gradually increasing and motivating a demand for further advances. Autonomy can be defined as the ability of an intelligent system to achieve specific tasks under the uncertainty of the system itself and its environment [1]. In realizing a specific task, the stronger a system’s ability to deal with uncertainty while requiring less or no human interference is, the higher its level of automation is [2]. Various standards for measuring the level of AV automation have been defined, and the automotive industry usually employs a six-level classification standard ranging from 0 (fully manual) to 5 (fully autonomous) as defined by the Society of Automotive Engineers (SAE International) [3]. The existing definitions of autonomous driving specified by the SAE for Levels 1–5 can be interpreted as follows [3]: For Level 1 vehicles, driving assistance systems can sometimes assist the driver in completing some lateral or longitudinal driving tasks; Level 2 vehicles can automatically provide multidimensional assistance; at Level 3, vehicles can execute automatic acceleration and deceleration steering in a specific environment without the driver’s intervention; at Level 4, if a vehicle is currently in an autonomous driving state under limited conditions, the driver is not required to continuously control the steering wheel; at Level 5, vehicles can run automatically under any conditions and scenarios. Here, the automatic system of a vehicle completely replaces the human driver and achieves full automation.
In the development process of vehicles corresponding to Levels 1–5, various potential issues can hinder the realization of autonomous driving, including the dynamic, random, and diversified nature of traffic participants; coupled, time-varying, and complicated traffic environments; and unstructured, vague, and even unreasonable road infrastructures [4–6]. Three main challenges can be outlined as follows: ① the superposition of multiple traffic scenarios, such as in downtown areas; ② the impossibility of implementing ideal environmental adaptation when considering dynamically changing weather and road conditions; and ③ uncertain traffic conditions, such as random emergencies and other potential problems. Therefore, to enable higher-level autonomous driving, it is necessary to formulate an effective development concept for self-driving vehicles so that they can sufficiently estimate, judge, and predict the risk degree in a traffic environment in an intelligent manner. Moreover, they need to be capable of planning specific driving strategies and routes, as well as realizing safe, reliable, and high-level autonomous driving in complex and uncertain environments while considering the intentions and decision-making mechanisms of other road users.
The proportion of traffic accidents caused by human error during the driving process exceeds 90%, including driver limitations in various stages of perception, cognition, reasoning, and decisionmaking [7–9]. A fundamental way to solve traffic safety problems is to implement autonomous driving technology and gradually increase the level of automation. Many automobile manufacturers have specified their own research approaches to promote the development of autonomous driving technology. Currently, the mainstream autonomous driving technology routes include the following [10,11]: ① the gradual evolution route, starting from the invention of advanced driver assistance systems (ADASs) and gradually developing to the unmanned driving stage—most traditional automobile enterprises have generally adopted this relatively conservative route [12]; ② the revolutionary route, implying that the enterprises develop Level 4 or Level 5 autonomous driving vehicles from scratch, such as Google, Ford, General Motors Company (GM), Momenta, and other companies; and ③ the Tesla route, where a vehicle is equipped with autonomous driving system hardware, auxiliary autonomous driving functions are applied, and test data are continuously accumulated; then, the autonomous driving system is improved through software upgrades, and unmanned driving is eventually realized.
However, when implementing these different existing technical routes, similar problems arise. Specifically, ① AVs may violate traffic rules, brake frequently, sacrifice passenger comfort, and have a negative impact on traffic; ② the safety algorithm may rely on insufficient influencing factors, which makes it difficult to accurately judge a driving risk degree; and ③ AVs can be easily trapped in a complex environment due to the lack of comprehensive judgment ability and consequently encounter decision-making conflicts. These difficulties may cause a series of unreasonable selfdriving phenomena during the actual driving process [13], such as fail to stop when encountering pedestrians, cross multiple lanes at one time, brake frequently when encountering other vehicles, hesitate and stop when turning left, and others. In addition, AVs have also caused many accidents [14]. For example, in 2016, a Tesla vehicle Model S crashed into a truck that was turning left when it was passing through a crossroad. In 2017, a rear-end collision occurred during the test of a Waymo AV. In 2018, Uber’s autonomous driving test vehicle caused an accident, as the system could not accurately identify pedestrians outside the crosswalk.
Although the research routes adopted by various institutions have exhibited particular emphasis, the development concepts for high-level AVs are mainly based on scenario-driven and taskdriven approaches to perform specific function development under predefined scenarios [5]. This concept has a certain guiding function for the development of Levels 1–3 driving assistance systems and can serve to implement specified functions under predefined scenes. While establishing Levels 3 and 4 autonomous driving is task-driven, it can realize human–machine cooperative driving under limited conditions. Concerning Level 5 vehicles, the scenario-driven concept may cause problems due to an infinite number of possible scenarios, implying that vehicles need to adapt to any scenario. Further task-driven considerations will result in an excessive number of restrictions, thereby hindering the development of Level 5 AVs that can drive freely and unconditionally. For example, the awareness of following traffic rules might not be strong enough; some road structures and traffic facilities in the driving environment are often unreasonable and outdated. The existence of specific behavior patterns of traffic participants and the peculiarities of the driving environment have greatly increased the application challenges associated with the existing scenario-driven and task-driven development concepts.
Therefore, Level 5 AVs are expected to achieve the performance levels beyond human drivers and considerably improve vehicle performance. Developing Level 5 AVs generally relies on learning and adapting to the human driving mode, and it is expected that these vehicles will eventually overcome human driving limitations [2]. Actually, there are few research paradigms that explore the physical mechanisms behind high-level autonomous driving systems and reveal the nature of driving from a brand-new systematic, unified, and balanced perspective. Therefore, in view of the limitations of the existing methods, we seek to outperform the traditional research concepts by adopting a novel reasoning and deduction method. We first focus on discussing the coordination and balance framework based on the brain–cerebellum–organ concept, and then we explore the research paradigm of selflearning and prior knowledge. By conducting pioneering research, we aim to realize the characteristics of self-learning, selfadaptation, and self-transcendence for AVs and provide novel research concepts for the development of Level 5 AVs.
《2. Limitation analysis of existing research frameworks》
2. Limitation analysis of existing research frameworks
The general concept underlying the development of AVs is to divide the whole system into separate interconnected layers and functions. First, AVs need to perceive environmental parameters and identify targets using an environment perception layer. Then, performing a situational assessment can improve the understanding of a driving environment, including driving behavior intentions. Moreover, at this step, the AVs need to estimate and predict the future driving risk level as well as assess the risk level of the other traffic participants to understand the current state of an environment [15]. Finally, AVs complete path planning based on the outputs of the decision-making and executive control systems to realize the primary driving operation task.
Specifically, the existing approaches for developing AVs based on scenario-driven or task-driven concepts can be mainly divided into a hierarchical autonomous framework based on a perception–decision–control paradigm and an end-to-end overall learning framework.
《2.1. Analysis of the perception–decision–control hierarchical framework》
2.1. Analysis of the perception–decision–control hierarchical framework
In current autonomous driving systems, the perception, decision, control, and execution modules rely on a multifunctional superposition design scheme used for independent design and development. When an AV advances to a higher level, it needs to enable a correspondingly higher level of functions. However, the existing research framework usually directly superimposes new elements based on the original system to integrate existing functions and generate new ones. An integrated architecture corresponding to hierarchical structure design and function superposition is relatively simple and easy to implement, which is important at the primary stage of developing autonomous driving systems [5]. However, additional factors need to be considered, including the increasing demand for functions, the need for continuous integration of subsystems, the increasingly complex system structure, the mutual interrelations, and overlapping between the functions and structures of different embedded systems. These factors can cause various problems such as a redundant configuration of structures, a low utilization rate of resources and an increase in system costs.
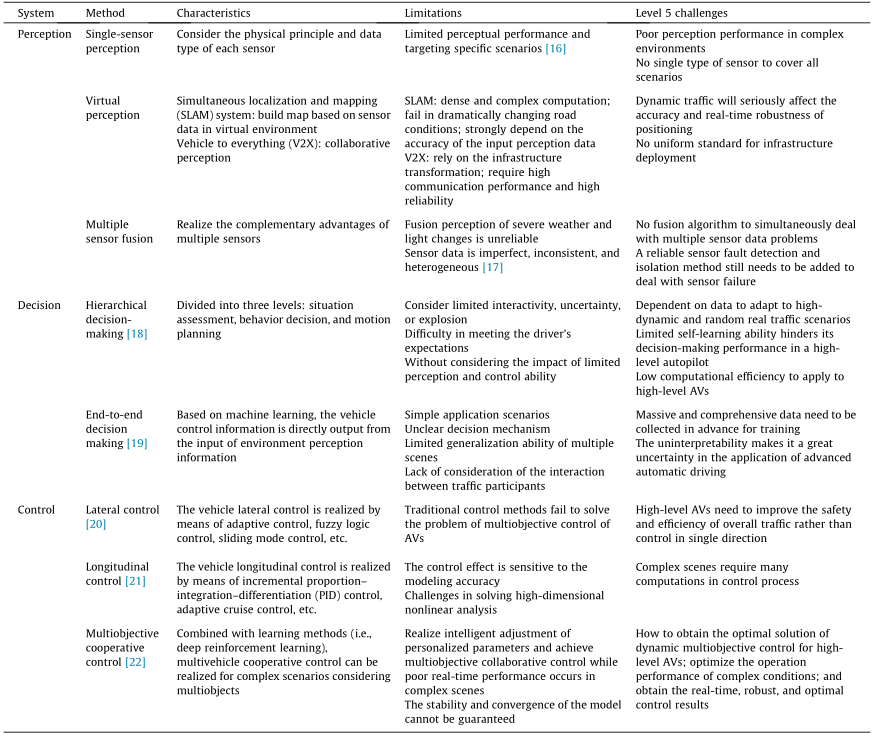
In particular, the rule-based method is often utilized for decision-making in a hierarchical framework. This method can effectively realize the decision-making process for AVs corresponding to Levels 2–4 and is deemed applicable to the specific scenario-driven and task-driven autonomous driving modes. Its representative techniques include finite state machines and others. The key concepts of this approach are intuitive, comprehensible, and easy to implement. In simple scenes, its applicability is superior compared with other feasible methods. However, the obvious disadvantage of these methods is that they lack the ability to summarize unknown situations, which makes it difficult to extend them to the complexity of real-world driving, specifically concerning high-level autonomous driving. In a hierarchical framework, the specific characteristics and limitations of each subsystem are summarized in Table 1 [16–22]. In view of the current difficulties of these systems, many challenges will also be encountered in the process of moving towards Level 5 AVs.
《Table 1》
Table 1 Characteristics of the perception–decision–control framework.
《2.2. Analysis of the end-to-end learning framework》
2.2. Analysis of the end-to-end learning framework
Many innovative companies and institutions have researched and promoted end-to-end training in the field of autonomous driving by combining in-depth learning with enhanced learning [19,23]. The end-to-end learning method can directly export the input information obtained from sensors to the vehicle bottom controller (brake, throttle, steering, etc.). Concerning an existing end-to-end learning framework, its continuous exploration and learning attributes can enable AVs to realize the process of selfadaptation and self-learning [24]. However, due to the hidden characteristics of the intermediate links of the end-to-end framework, various problems, such as unclear learning content, uncontrollable learning direction, and irrelevant learning strategies, eventually occur in the case of unknown and uncertain situations in actual traffic scenarios. Due to the black box problem of the end-to-end intermediate process, the transparency is not high, resulting in a high degree of inconsistency between the corresponding functions and expectations. Meanwhile, the potential physical mechanism behind the learning methods is usually not clear, leading to many potential risks in developing vehicles at higher levels. Furthermore, the interpretable problems caused by the failure to deeply reveal the physical mechanism behind the model can become bottlenecks hindering the further development and application of the learning methods. Specifically, problems such as difficult to combine with rules; high computational cost and high hardware requirements; insufficient samples, insufficient completeness, and high training cost further hinder end-to-end learning in practical applications [25].
Therefore, just based on end-to-end exploration or the existing hierarchical framework, we cannot effectively deal with these abnormal situations. Complex traffic scenarios usually have contained these uncertain, unpredictable, and unconventional elements. If high-level AVs follow the current development trend driven by a single function, specific scenes and tasks, they will not be able to effectively deal with common abnormal traffic conditions. Traditional research methods aimed at specific scenes and single traffic environment cannot fully reflect the decision-making and control ability of drivers in real traffic environments, and it is difficult to provide a guidance foundation for the development of anthropomorphic driving algorithms for high-level intelligent vehicles.
《3. Re-examination of research on the difference between Level 4 and Level 5 AVs》
3. Re-examination of research on the difference between Level 4 and Level 5 AVs
《3.1. The target of Level 5 AVs》
3.1. The target of Level 5 AVs
According to the specified definitions, there is an essential difference between Level 4 and Level 5. Namely, Level 4 can realize highly automated driving, but its limited conditions make Level 4 approach driver behaviors only under the premise of covering various scenes as much as possible. However, it cannot realize 100% practicality and the unconditional universality requirements assumed in Level 5. According to the SAE International classification standards, the difference between Level 4 and Level 5 AVs is the operational design domain (ODD), meaning that Level 4 vehicles can only operate in a predefined operating range, while Level 5 can operate under any possible condition with ethical norms. However, if Level 4 and Level 5 are distinguished in terms of scene coverage and operating conditions, the definition of Level 5 can be blurred, thereby inducing a series of discussions on whether it is necessary to develop Level 5.
Therefore, on the basis of SAE International standards and other promulgated classifications of AVs, we will reclarify the essence of Level 5 vehicles. Level 5 AVs will no longer be a traditional vehicle, but a new type of vehicle with self-learning, self-repairing, self-configuring software, autonomous social interaction, and autonomous driving capabilities that can handle different scenarios. The characteristics of self-learning, self-adaptation, and self-transcendence can be applied to AVs corresponding to Levels 2–4; however, this process is one-way, and Levels 1–4 vehicles can be considered as special cases of Level 5. Further analysis shows that in the development of Levels 1–5 vehicles, Levels 1–3 vehicles can be understood as a task agent focusing on perception. Then, Level 4 realizes decision-making tasks in a given complex scene, providing a certain task processing boundary. The main reason for the occurrence of this task boundary is that the Level 4 self-driving system makes decisions based on the statistical information instead of facilitating logic-based decision-making. We can also consider the Level 4 vehicle as corresponding to a partial sample. After achieving Level 4 technology, it can be verified in a partial sample but cannot cover the whole range of samples. Level 4 vehicles operate under a limited working condition. However, concerning infinite uncertain scenarios, the primary goal does not imply listing all possible examples that can be realized rather than enabling a self-exploration ability.
Therefore, Level 5 requires the self-driving system to incorporate a decision-making ability capable of dealing with unknown driving scenes. The main difference between Level 4 and Level 5 lies in the question of whether it is capable of reasoning and logic-based self-learning, which can also be referred to as a self-correcting ability. Unlike a machine learning mode, this capability not only enables an autonomous driving system to extract features from driving experience by statistical methods but also facilitates further refinement of an interaction mechanism between the controlled vehicles and a traffic environment. Therefore, a correction logic can be considered capable of systematically adjusting the autopilot system (as opposed to the adjustment of a single module).
《3.2. Difficulties in realizing Level 5 AVs》
3.2. Difficulties in realizing Level 5 AVs
In the real traffic environment, there are a large number of various traffic participants; the time variation and behavior uncertainty corresponding to each participant increase the complexity of a traffic system. As described in Ref. [26], some common challenges in developing AVs mainly include bottlenecks in existing technologies and inadequate infrastructure. As mentioned in previous studies [6,10], according to the current situation of perception, decisionmaking and control technologies, these various technologies are indispensable for the actual realization of Level 5 AVs. For example, Chen et al. [27] introduced a novel concept of event-based autonomous driving neuromorphological vision, which can help high-level AVs acquire more accurate visual perception information. This is essential for the development of higher-level AVs, especially Level 5 AVs. However, there is a gap between the technical conditions required by high-level AVs and the current development status. In addition to technical and infrastructure challenges, AVs are still unable to reach Level 5 for the following reasons:
(1) Difficulties in understanding the action mechanism of traffic elements. In a complex environment, the mechanism of each factor’s influence on driving risk is unclear, and it is challenging to explore the coupling mechanism between each factor. For example, the cognition and judgment mechanism of drivers on static and dynamic traffic elements is not clear, the adaptability and manipulation level of drivers to vehicle dynamic characteristics are difficult to quantify, and the dynamic interference mechanism of various traffic factors to drivers is uncertain. Therefore, highlevel AVs need to fully recognize the coupling risks in driver– vehicle–road traffic systems. Furthermore, AVs also need to apply the laws of driver cognition of potential risks caused by various elements of the driving environment to intelligent vehicle risk assessment and realize accurate risk identification under a complex traffic environment.
(2) Difficulties in understanding the dynamic rule of traffic systems. In the dynamic uncertain environment, there are many uncertainties in the driver–vehicle–road system. For example, the uncertainty brought by people’s participation and the randomness of drivers make the traffic complex system more uncertain. Environmental changes lead to difficulties in traffic cognition. The uncertainty of road conditions leads to the uncertainty of vehicle performance adaptation. The uncertainty of information acquisition (the uncertainty of communication means and safe communication level) brings the uncertainty of the information scope of complex traffic systems. Therefore, the development of high-level AVs needs to fully explore the changing laws of the traffic environment, consider the dynamic intentions of other road users, estimate, judge, and predict the risk degree in the traffic environment, and improve the decision-making level and ability of intelligent vehicles in complex environments by planning specific driving strategies and trajectories.
(3) Difficulties in understanding the mechanism of implementing decision-making. In a complex traffic environment, solidified autonomous decision-making has difficulty conforming to the driving habits of excellent drivers, and it is difficult to adapt to the driving needs of different personalities to reduce people’s acceptance of the autonomous system. Learning human wisdom to solve challenges is a feasible approach for the development of AVs. Levels 1–4 AVs do not fully learn the thinking of drivers, and the development of Level 5 AVs can be better supported by truly analyzing human decision-making mechanisms. However, it is difficult to learn the decision-making mechanism of human drivers. How to analyze the decision-making mechanism of drivers and how to make logical judgments at the decision-making level still require further discussion. Especially after the unified expression of various elements of environmental perception is given at the front end, how to accurately and meticulously reflect the driver’s decision-making mechanism and the realization of an anthropomorphic decision-making strategy are critical to the development of Level 5 AVs.
In addition to the technical and mechanistic problems, the existing research concepts still need to be further explored. Currently, the hierarchical structure of autonomous driving can effectively ensure that each task (perception–cognition– evaluation–decision–control) in the driving process can be completed independently. Furthermore, the completion of a single task can be accurately evaluated. At the beginning of the development of technology, this modularized and layered task structure is an inevitable requirement for realizing complete functions. However, this modularized and layered design structure may lead to the possibility that the self-correction of the self-driving system only exists in a single module. For example, advanced decisionmaking modules can already have a certain self-adjustment capability; however, they can only consider how to perform selfoptimization and self-adaptation during driving. Therefore, they fail to effectively evaluate and influence other modules in the system. The current decision module design process usually takes the input provided by the perception and the output required by the control as the existing and fixed conditions. The modules are rigidly bridged, which means that the decision-making module cannot fulfil the requirement for collaborative correction with other modules. In addition, it cannot provide feedback to perform the correction process aligned with the other modules.
However, the lack of a feedback mechanism among the modules leads to the self-driving system losing the ability of cooperative growth as well as a systematic self-correcting ability. Moreover, the advance of a single module is unpredictable and even not necessarily beneficial concerning the overall system performance. An autonomous driving system with the ability of single module growth may even lose the overall coordination of the system due to the independent learning of each module during the selflearning process.
《4. Realization of Level 5 AVs》
4. Realization of Level 5 AVs
The autonomous driving system is considered an integrated framework equipped with a large number of hardware structures and software algorithms [28]. In a traditional hierarchical superposition framework including various functions, the physical structures corresponding to different functions correspond to different subsystems. Each part of the structure and its corresponding functions are launched according to problems faced by the integrated framework in practical applications. The physical structure ontology is controlled through information transmission and energy transportation to realize the system functions with different extents of intelligence. However, the series of challenges associated with the existing hierarchical design framework require new ideas for the research and development of high-level autonomous driving systems from the perspective of system theory. To achieve this, we need to think about the following questions: How can we actually analyze behavior patterns of human drivers, explore their decision-making and control mechanisms, and enable autonomous driving systems to perform autonomous learning and exploration; how can self-driving vehicles acquire the wisdom of learning and imitating people and surpass people’s decisionmaking abilities; and how can we integrate consciousness and function into the autonomous driving system to output more intelligent and reasonable driving behavior?
These problems induce us to avoid considering each function of an autonomous driving system discretely by decomposing it into its components. In contrast, we need to analyze the common principles and structures in each system, components and substructures from the perspective of the vehicle system as a whole. Furthermore, we also need to apply brain and consciousness theories, such as global workspace theory (GWT) [29] and integrated information theory (IIT) [30], to design and optimize a unified system structure. As shown in Fig. 1, the function of an autonomous driving system can be described as an overall attribute of the system to the environment. It is the function and capability that the system can play in a certain environment. It is the external connection of the system and constitutes the relationship set between the system and the environment. Furthermore, it can be realized in the dynamic operation of the system and expressed as the input and output of material flow, energy flow and information flow. Following a systematic thinking mode, it should be possible to provide a better solution for the development of high-level AVs, especially Level 5 vehicles. Meanwhile, the research on high-level AVs is expected to form the concept of learning from, simulating, surpassing, and serving humans. The ultimate goal is to place humans at the center and serve them. Therefore, the development of high-level AVs can be promoted in the external environment of vehicle–road–cloud coordination by systematic thinking and human-centered ideas.
《Fig. 1》

Fig. 1. System overview flowchart. The existing scenario-driven and task-driven approaches will be difficult to break through the Level 4 AVs limited by the operating domain, so it will be challenging to realize the Level 5 AVs. Therefore, we consider AV as a whole system and establishes a unified and universal framework based on hybrid intelligence from the perspective of a human-like system. LKA: lane keeping assist; ACC: adaptive cruise control; AEB: autonomous emergency braking.
However, at present, the development path for high-level AVs is mainly developed from the application scenarios and the requirements of different driving tasks. Scenario-driven and task-driven methods eventually bring problems such as decision conflict and functional redundancy due to the continuous superposition of functions of a layered framework. Therefore, an AV developed under this concept will be difficult to break through Level 4 with the limit of operating range, and it will be challenging to realize Level 5. Therefore, we set aside the concepts of the existing framework, regard an AV as a whole, and establish a unified and universal framework based on hybrid intelligence from the perspective of a human-like system. First, we develop an open brain-like system, and then the factors that can affect traffic safety are input with unified situation awareness. Finally, the real-time decision and control are output to provide feasible ideas for the realization of Level 5.
《4.1. Brain–cerebellum–organ coordination and balance framework》
4.1. Brain–cerebellum–organ coordination and balance framework
The brain–cerebellum–organ coordination and balance framework can be used to develop a self-managing brain-like module as a system layer by considering the technologies of perception, evaluation, decision-making, and control as different functional layers. Specifically, decision corresponds to the cerebellum, perception corresponds to eyes, and control corresponds to hands and feet. Considering the deployment of the brain-like module, the regions of interest can be selected using the perception technology of AVs to analyze the environment selectively and intentionally. Moreover, driving risk can be quantified in a real-time manner using the assessment technology implemented in selfdriving vehicles to ensure a particular level of safety. The decision-making technology of autonomous driving vehicles is integrated to optimize decision-making and balance various functions. Finally, reliable driving can be realized through the steady control and execution of the control technology. However, the scenario-driven development concept corresponding to the existing hierarchical framework and end-to-end frameworks relies on the feedback transmission structure. This means that the autonomous brain-like system implies not only exchanging two-way feedback related to an individual stimulus–response with each part of the structure but rather relies on a complex structure network characterized by intention diffusion. As shown in Fig. 2, in the brain–cerebellum–organ coordination and balance framework, the AV senses the traffic environment to stimulate the brain through the sensory organs and translates the large amount of historical data to be stored in the brain for memory. The cerebellum, on the basis of the principle of minimum action, performs the functions of thinking and coordination by invoking the internal state. Finally, the brain and cerebellum output the activation state together and complete the control process by controlling organs such as hands and feet.
《Fig. 2》

Fig. 2. The brain–cerebellum–organ coordination and balance framework. In this framework, the external states stimulate the brain, the traffic information is stored, the cerebellum calls the internal state to complete the thinking, and finally the brain and cerebellum output the activation state together with the feedback to complete the control.
As shown in Fig. 3, we can assume that the training process of autonomous driving is similar to that of a boxer. The perception technology corresponding to autonomous driving can enable him to input external information and perceive potential risks. Control technology can be used to train boxers to exercise skills and muscles. Decision-making technology corresponds to the cerebellum and plays a balancing role in the coordination of various skills. However, relying solely on the cerebellum, sense organs, hands, and feet do not enable a boxer to achieve the skills possessed by a high-level boxer. Each skill only corresponds to the cerebellum and various physical abilities but does reflect the brain’s ability to enable attacking and protecting actions. Similarly, in the case of autopilot, its core allows achieving self-learning, selfadaptation, and self-transcendence characteristics to build a complete autopilot brain-like module.
《Fig. 3》
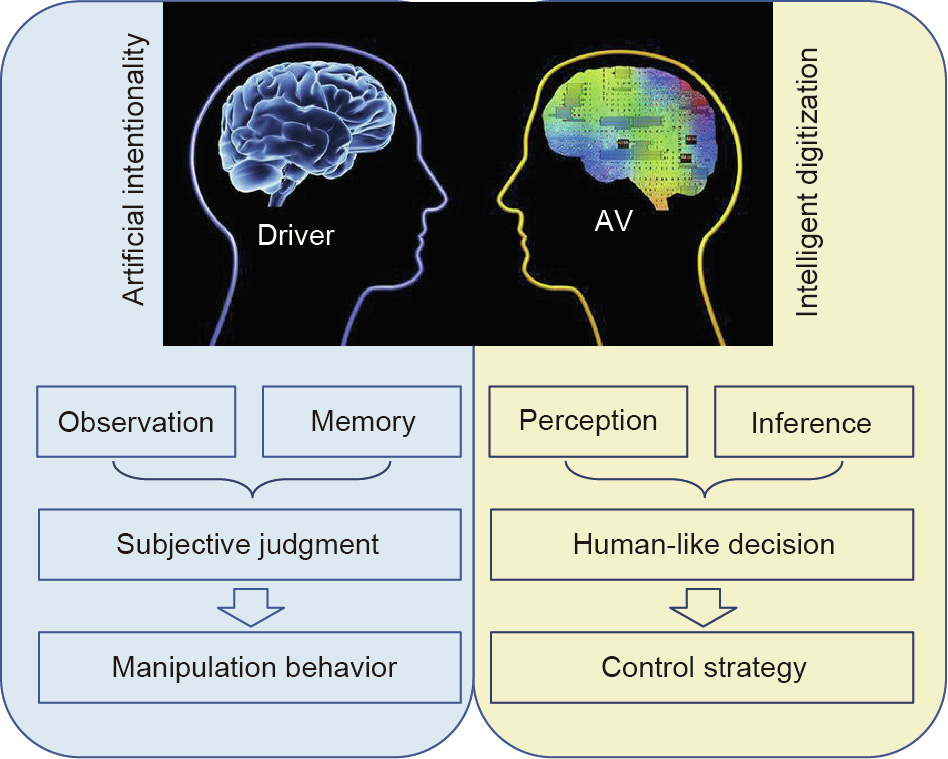
Fig. 3. The correspondence relation between drivers and AVs. AV requires some basic skills of a driver as well as an internal understanding of human behavior and their social expectations. It can be understood that the artificial intentionality of a driver corresponds to the intelligent digitization of an AV.
The main function of the brain is to allocate various skills—to explore, to learn, to think, to dominate all activities in the body and to regulate the balance between the body and the surrounding environment. When an autonomous driving system has control and perception modules, the control and information processing center is required as well to manage the whole system. If the upper-level system is defined as the autonomous brain-like module, then the control and perception system corresponds to the cerebellum and organs of autonomous driving. Only with the development of the brain, cerebellum and organ systems together can the autopilot system be established appropriately. Moreover, to implement a driving function that meets the social expectations of humans, the autonomous driving system needs to behave as human as possible, which requires an internal understanding of human behavior patterns and the social expectations of the group. The other issue hindering further development under the existing framework is the difficulty of overcoming bottlenecks, such as generalization of scenes, integration of multirisk factors, the coupling of solving objectives, and therefore, it is impossible to fully understand the physiological and psychological mechanisms of driver decision-making. The autonomous brain-like module should be able to simulate and learn driver behavior patterns to complete tasks by organizing the whole system to make full use of various human cognitive activities in a specific environment. Furthermore, due to self-awareness in the brain, the ability to self-explore and actively solve problems in uncertain situations is often realized. Therefore, the autonomous brain can also effectively deal with nonideal situations. For example, in the driving process, the autonomous brain can quickly take effective measures to deal with the random parking of other surrounding obstacles or other behaviors that do not follow traffic rules such as another vehicle’s cut-in, overtaking, and lane changing.
In fact, these behavior patterns are very common in many parts of the world. For example, if vehicles need to deal with situations requiring complex observation and interaction, such as highway merging and unprotected left turn, it is also a challenge for human drivers. For a long time, AVs and human drivers will drive together in the same environment, so AVs are expected to understand the intentions of human drivers and respond in a predictable and interpretable manner. Although turning left on an empty road may be considered a simple and feasible task for AVs, it is still difficult in complex traffic environments. For human drivers, these unprotected left turns often occur when a driver slows down and gives up, implying that another driver can turn safely. This is a great challenge to the currently developed autonomous driving system. Therefore, the application of scenario-driven research concepts is limited to the above challenges, and it fails to break through the limitations of achieving real high-level intelligence. Intelligence is a phenomenon that can be expressed in the interaction and behavior process of individuals, nature, and social groups. Therefore, from the perspective of system science, the essence of driving is understood from a systematic point of view to achieve general intelligence.
《4.2. Crow inference and parrot imitation research paradigm》
4.2. Crow inference and parrot imitation research paradigm
Tsien [31] noted that the human body can be considered an open system that interacts with the outside world, for example, through breathing, eating, excretion, and so on, aiming to exchange materials with the external environment. Moreover, it can exchange information through vision, hearing, taste, smell, touch, etc. In addition, a human body consists of hundreds of millions of molecules, comprising an enormous complex system. The components of this system are of different natures, and their interactions are extremely complicated, constituting a large, complex, and sophisticated system. Therefore, during the process of developing an autonomous driving system, it is necessary to refine the existing problems corresponding to the systems and to conduct the research in a systematic way.
Actually, with an increase in the extent of how open a system is, its ability to deal with high complexity improves as well as its ability to adapt according to a changing environment. Zhu [32] at the University of California, Los Angeles, has introduced two illustrative models for artificial intelligence (AI). One is referred to as the parrot paradigm and considers that parrots can talk to humans but do not understand what they say. For example, when you say ‘‘Hello,” it responds ‘‘Hello,” but it does not know what it means. The other concept is denoted as the crow paradigm. It is evident that crows know to keep throwing stones into water bottles to raise the water level to drink the water. There are significant differences between the parrot-like imitation learning paradigm and the crow-like inference learning paradigm. For parrots, it is a simple and rough imitation learning, which can realize humanlike behavior mechanically without acknowledging the underlying reasons behind learning. In contrast, crows can study causal relationships and infer solutions to complete a task autonomously. Crows rely on their own observation, perception, cognition, learning, reasoning, and execution to live a completely independent life. Therefore, it can be understood that crows have the ability to learn independently and explore the unknown. Correspondingly, in the development process of AVs, intelligence can be considered a phenomenon, which is reflected in the behavior process of individuals and social groups. The improvement of the intelligence of AVs depends on the objective reality and causal chain of the physical environment. For example, the outer physical environment provides living boundary conditions for crows. In different environmental conditions, the form of intelligence will be different. Any intelligent machine needs to understand the physical world and its causal chain and adapt to the world. Meanwhile, the intelligence of AVs can meet the specific tasks they need to complete. Tasks represent values and decision functions, which are the rigid needs of biological evolution. Intelligence is not only adaptive (for example, just stimulus and response, without prediction and inference) but also suitable for low-level AVs limited in ODD. For highlevel AVs, inadaptability is more important to some extent; for example, it can reason, evolve, and surpass the limitations of a human being itself. High-level AVs can create a new type of possibility to adapt to interaction to achieve transcendence. Therefore, when developing a high-level autonomous driving system, especially for Level 5 vehicles, it is necessary to effectively combine the two different learning models corresponding to crow and parrot and to develop a third mixed model referred to as the crow inference and parrot imitation model. According to the aforementioned understanding of the concept of ‘‘intelligence,” real intelligence is not only adaptable but also nonadaptable, thus creating a new possibility to realize the ultimate goal from self-adaptation to interaction to self-transcendence, thus creating a series of new possibilities: freedom, change, and interaction. The shortcoming of the Turing machine is that it implies only stimulus-based response but no selective mechanism, as well as only adaptation but no assimilation mechanism, which is similar to the parrot paradigm. The evolution mechanism of humans corresponds to the crow inference paradigm, which can infer and evolve autonomously. However, we consider that it is necessary to combine the two paradigms together to actually transcend the limitations of human reasoning, improve the computational power of intelligent systems, and integrate the advantages of intelligence, as shown in Fig. 4. Therefore, we consider the proposed crow inference and parrot imitation hybrid paradigm as a future trend of developing high-level AVs, specifically, Level 5 AVs.
《Fig. 4》

Fig. 4. The crow inference and parrot imitation framework. Parrot imitation can achieve the adaptability through data-driven deep learning method, while crow inference is supposed to be inadaptable to the traffic environment. By combining both of them, AVs can achieve interaction and evolution along with the changes of the environment.
《5. A feasible way of developing Level 5 AVs》
5. A feasible way of developing Level 5 AVs
《5.1. Open evolution of the brain-like system》
5.1. Open evolution of the brain-like system
We assume that the considered brain system corresponds to open evolution. The crow and parrot hybrid paradigm is open and divergent. Therefore, it can rely on open evolution, thereby overcoming the limitations of the existing technologies and ways of thinking. In the conventional architecture, each function is solved within layers. However, the development of a brain-like system requires enabling autonomous learning and exploring unknown concepts on the basis of existing knowledge using AI [2]. The development mode corresponding to ‘‘autonomous learning and prior knowledge” enables the brain to continuously explore personalized requirements of drivers or passengers while based on a large number of common decision-making mechanisms and control laws, thereby realizing the goal of self-learning, selfadaptation, and self-transcendence.
There are two main approaches to planning the development of AVs: ① the autonomous learning approach [24,33] and ② the logical judgment (prior knowledge) method [24]. Concerning the former, deep neural networks (DNNs) have achieved remarkable results in autonomous driving. However, when a DNN is applied to safety–critical modules, such as behavior definition, prediction, and decision-making, it may lack interpretability and causality, and thus it has difficulty merging with domain knowledge. In addition, building an accurate DNN requires a large amount of relevant data for training and cannot be applied to unfamiliar scenes, specifically concerning extreme cases. The probability and logical explanatory models can be used to clarify causal relationships through logical judgment and have the capability to model uncertainty. However, these inherent logic models have low adaptability and relatively low representation ability in the case of complex scenes. Therefore, to address these issues, we propose a hybrid framework combining the advantages of learning methods and probability and logic models to achieve interpretable and efficient behavior definition. Within this framework, we propose a development mode based on autonomous learning and prior knowledge, as shown in Fig. 5, which can be used to establish a driving behavior control layer by using low-dimensional representations of the dynamic real-world conditions estimated using probability models and observed values. Therefore, the proposed brain-like system can transfer the prior knowledge stored in a human brain and explore unknown concepts using the self-learning framework, thereby constructing more complex and high-level knowledge reasoning.
《Fig. 5》

Fig. 5. The unified AV framework combining rules-based and learning-based methods. High-level AVs are supposed to transfer from the hierarchical framework to the unified autonomous driving framework.
《5.2. Unified input of situation awareness》
5.2. Unified input of situation awareness
We assume situation awareness as the unified input of state– trend–sense–cognition. The systematic concept forming the unified safety field [34] can effectively solve the comprehensive situation awareness and risk assessment in a complex environment. Moreover, it may be used to realize a unified assessment function under the multidimensional scale of the multidomain integration between time and space. The driving process in intelligent vehicles is planned to be influenced by many factors corresponding to drivers, vehicles, and roads. Due to the complexity of a traffic environment, we note that road conditions are changeable; drivers vary in character and behavior; moreover, the complexity of a vehicle system may cause various potential risks associated with the driving process. Therefore, all of these potential influencing factors may make a safety situation timevarying, complex, and coupled.
In the scheme presented in Fig. 6, we define a ‘‘state” corresponding to situational awareness as all types of subjective and objective data representing an individual state of a driver–road– environment system. Here, ‘‘trend” is defined as a development trend of an event. ‘‘Sense” is regarded as the awareness of the ‘‘state” in a system, while ‘‘cognition” is defined as the understanding of ‘‘trend.” The theoretical model of deep situational awareness can be used to handle information differently in various situations. Previous studies dedicated to situational awareness have fully demonstrated the importance of providing situational awareness in a real-time manner; that is, the process needs to be updated and iterated continuously over time. Traditional situation assessment or perception technology in the driving process can mainly start from the perspectives of macro traffic management and micro vehicle dynamics [35]. However, the former is an after-the-fact evaluation that relies on massive historical accident data. It is difficult to evaluate the current risks in the driving process in time, to describe the current driving safety level, and to reflect the realtime nature. The latter considers incomplete risk factors and simple applicable scenes, which makes it challenging to apply to a complex and changing traffic environment. The mechanism of interactions among the elements of the driver–vehicle–road system within an environment has not been thoroughly studied [36], and consequently, the possibilities of its practical application are limited. Therefore, the existing research concepts corresponding to situation awareness still have certain limitations. In the present study, we aim to analyze the relationship between the elements of the driver–vehicle–road system from a unified viewpoint.
《Fig. 6》

Fig. 6. The state–trend–sense–cognition unified input framework. In the driver–vehicle–road system, the integrated situational awareness and risk assessment can be realized through four steps of state–trend–sense–cognition by taking into account the unified input of multiple factors. ER refers to the potential risks posed by stationary or inherent traffic participants in a traffic scenario, such as the risk constraints imposed by road conditions; ED represents the potential risk of different drivers’ perception/ cognition biases; EV means the evolutionary risk of traffic participants changing dynamically over time and space.
In view of the time-varying, complex, and coupling characteristics of the safety situation, the physical mechanism of the driving process are explored according to field theory, and a concrete model of the driving safety field is constructed. The driving risks associated with vehicles, traffic facilities, driver behavior patterns, and various factors in a traffic environment can be evaluated, and the internal factors affecting the driving risk distribution are determined to be the change of risk sources themselves and the change of risk gradient. Therefore, we can use the unified field model to quantitatively evaluate the driver–vehicle–road comprehensive risk and then effectively solve the problem of real-time driving risk modeling, which is difficult to implement in a comprehensive multifactor environment.
《5.3. Optimal output of real-time decision and control》
5.3. Optimal output of real-time decision and control
We assume that the output of the real-time decision-making and control module pursuits the optimal result. In a comprehensive traffic environment, due to the complexity and variety of driving scenes, the unpredictable behavior of traffic participants and the necessity to improve the requirements for driving safety, efficiency and comfort, an intelligent decision-making system of an AV can be viewed as equivalent to the cerebellum of a human driver. It is expected to coordinate and balance the control terminals of various operations. Specifically, a driver decomposes the driving path into several operations corresponding to a steering wheel, an accelerator and a brake pedal, thereby executing a planning operation. Analyzing the decision-making process of a driver under a comprehensive traffic scene, we extract the relevant attributes concerned by the driver during driving and analyze the main objectives pursued by the driver during the operation. Through the judgment, evaluation, and acquisition of driver behavior patterns, we can align the decision-making process of an AV with the thinking process of human drivers [2]. By establishing a feasible path-planning model based on simulation of human driving behavior, we aim to enable a real-time planning procedure according to the expected trajectory, which can effectively explore the optimal paths of the individual vehicle and multivehicle systems.
As shown in Fig. 7, by estimating the key parameters of the driving process based on the real data, we can confirm that an extreme value phenomenon is exhibited in the main motion parameters that reflect the decision-making behavior of drivers. The intrinsic reason underlying the extreme value phenomenon is that drivers follow the basic decision-making strategy of seeking gains and avoiding losses. Therefore, each driver seeks to achieve an optimal tradeoff between efficiency and safety during the driving process. Inspired by the fact that many extreme phenomena in nature, including physical and biological behaviors, follow the principle of least action, a hypothesis that the driver decision-making strategy is based on this principle is formulated [37]. We attempt to connect the physical characteristics of mechanical systems in nature with the inherent attributes of traffic systems and combine the purpose of seeking the best in nature with the characteristics of seeking gains and avoiding losses of drivers to propose a decisionmaking algorithm based on the least action [38]. Specifically, when selecting the optimal trajectory, we can propose an objective function based on the principle of least action by adopting a decision-making method that allows an AV to simulate the driver and by summarizing driver control characteristics [39]. The considered objective function comprehensively addresses driving expectations, such as high safety and efficiency, and screens the path by calculating the action amount of each feasible trajectory, thereby selecting a path with the least action and optimizing the speed of a vehicle accordingly.
《Fig. 7》
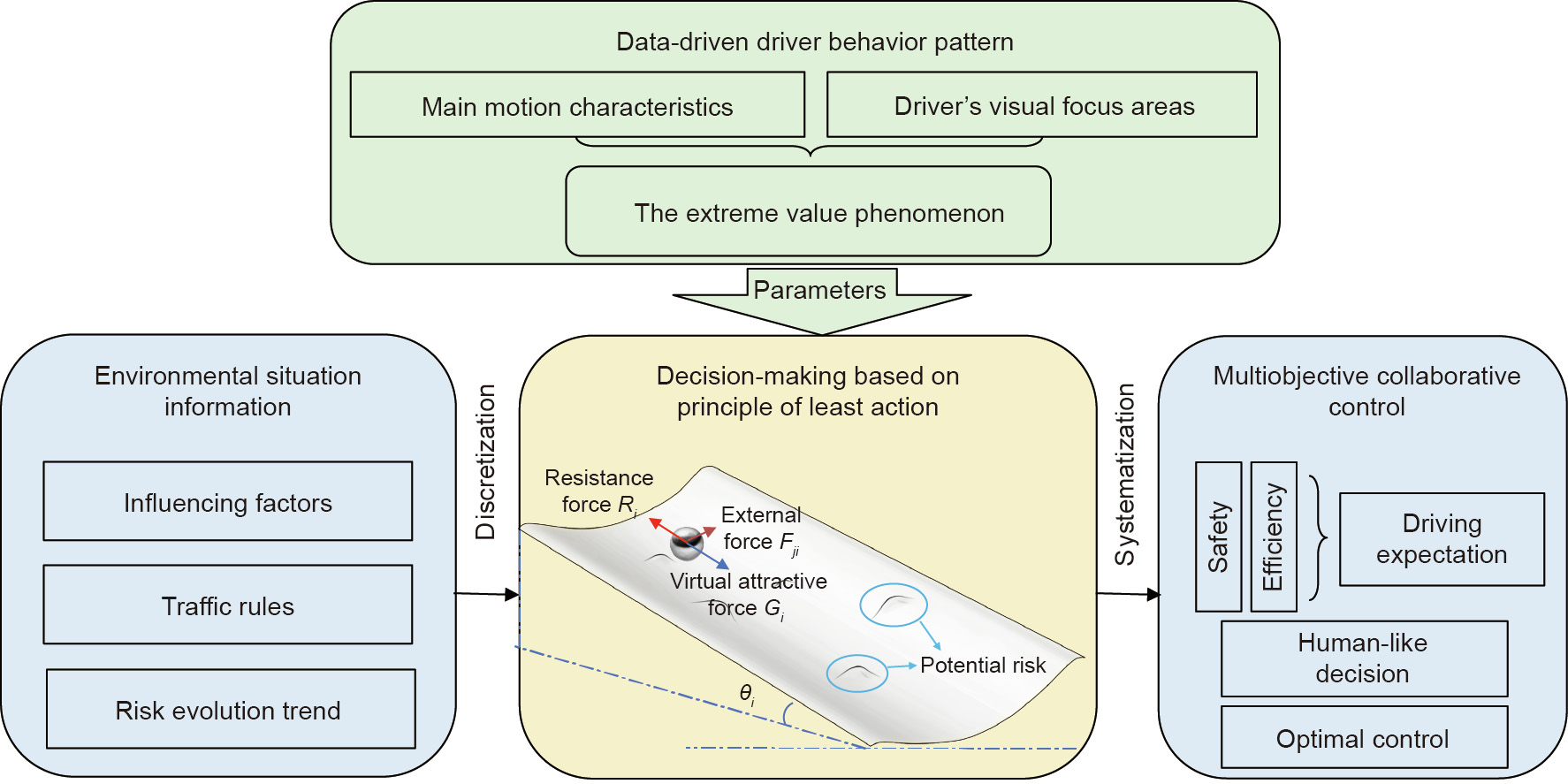
Fig. 7. A personified overall decision-making and control framework. Through inputting the discrete information in traffic environment into the optimal decision-making system, combined with the input of data-driven driver behavior pattern, the multiobjective cooperative control strategy can be output systematically. Gi : virtual attractive force; Ri : resistance force; Fji : external force; θi : angle of inclination; i : ego vehicle; j : external traffic participants.
The existing research on driver decision-making is not appropriate to fulfil the development needs corresponding to intelligent vehicle technology. The traditional driver behavior modeling approach, which is usually aimed at specific scenes and a simplified traffic environment, cannot fully reflect the decision-making ability of drivers in real traffic environments. It also fails to accurately quantify the decision-making behavior of drivers [40]. Furthermore, it is even more challenging to provide guidance for the development of anthropomorphic driving algorithms for high-level intelligent vehicles. Focusing on the limitations of existing methods, we plan to integrate the driver characteristic of seeking gains and avoiding losses in the driving process into the decision-making layer of the AV. By employing the driver’s manipulation thinking, we can control the bottom end and complete the driving task. In addition, the developed algorithm comprehensively considers the objective environment and surrounding obstacles (dynamic and static), is not limited to a single scene or static obstacles, and has a wider application range.
《5.4. A feasible idea for the realization of Level 5 AVs》
5.4. A feasible idea for the realization of Level 5 AVs
As an independent agent that interacts with information from the outside world, a high-level AV needs to be able to transcend human limitations and possess the abilities of consciousness and intelligence while following the expected operation rules of human beings. Here, ‘‘consciousness” refers to the ability of agents to perceive and understand things, and ‘‘intelligence” refers to the ability of agents to infer and solve problems. As shown in Fig. 8, high-level AVs are usually expected to have strong environmental perception, such as human eyes. Therefore, the perception–assessment module carries out dynamic information perception on the driver–vehicle– road system and provides sensory information input for the brain center. Meanwhile, intelligent vehicles are expected to be able to accurately predict the behavior of the surrounding traffic participants and adapt to the dynamic changes of the surrounding environment. As the core control unit of the vehicle, the decision system needs to be coordinated and balanced like the human cerebellum. The decision system provides a dynamic balance of discrete traffic participants, constraints, dynamic evolution trends, and inputs to the brain control center. As an independent agent that can interact with information in the outside traffic environment, high-level AVs need to be able to transcend the limitations of human beings while obeying the expected operation rules and possess the ability of consciousness and intelligence. Therefore, AVs need to be based on the development models of independent learning and prior knowledge. Furthermore, AVs can employ consciousness theory, such as GWT and IIT, and achieve closed-loop interaction from the perspective of the system. In this way, vehicle execution can be realized through hands and feet and timely adjustment of brain terminal actions. Based on the hybrid paradigm of crow inference and parrot imitation, there is an open-loop self-evolution process in closed-loop feedback.
《Fig. 8》
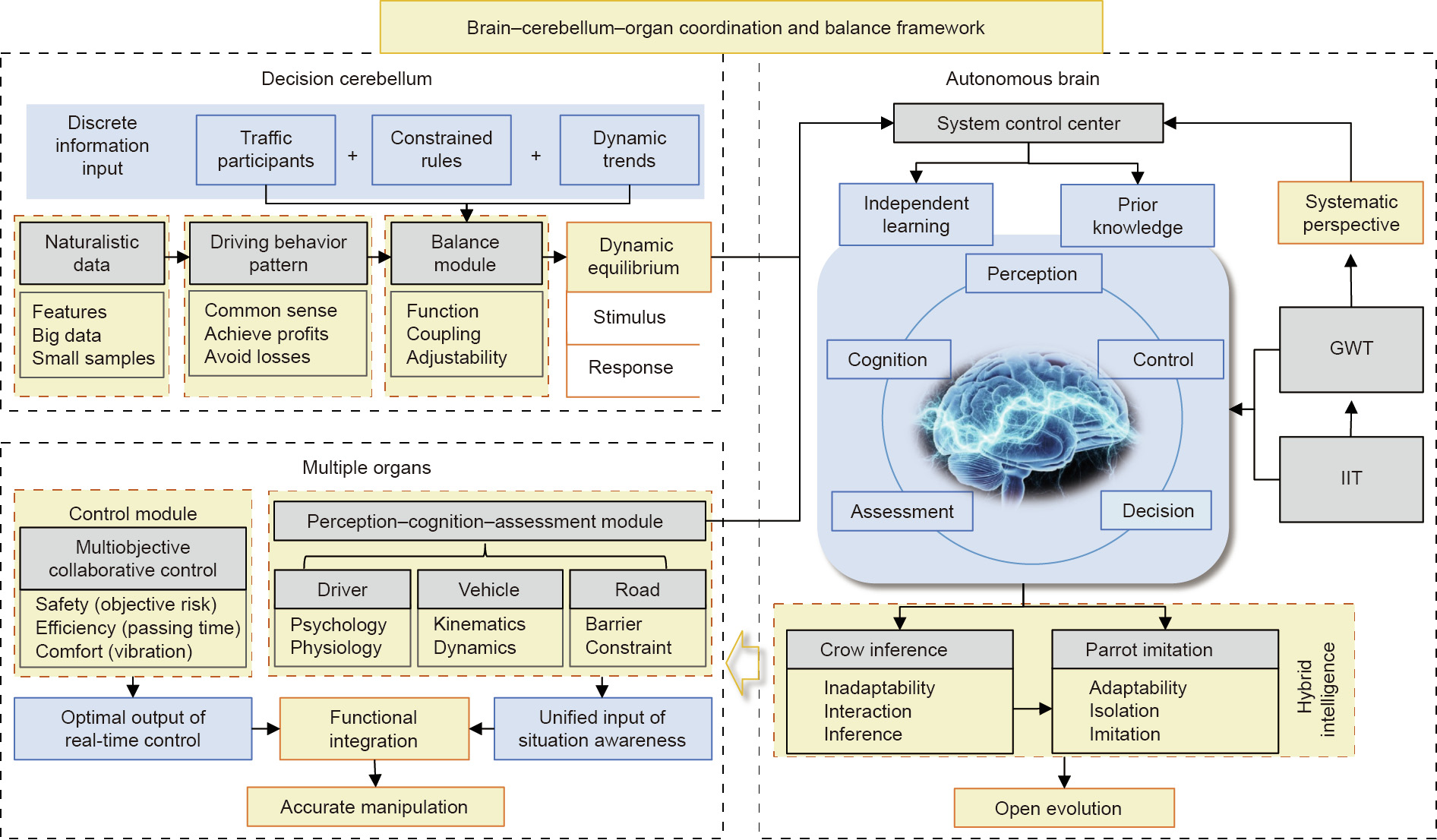
Fig. 8. System overview flowchart evaluating and acquiring the driver’s driving behavior pattern. High-level AVs acquire complex traffic environment information through the perception–cognition–assessment module, integrate various sensors for information fusion, and ensure the stability of vehicle environmental sensing system. The decision cerebellum collaboratively balances the control terminal of various manipulations, and makes the behavioral decision-making process conform to the thinking process of human drivers by judging, evaluating, and acquiring the driver’s driving behavior pattern. The brain system is based on the development mode of independent learning and prior knowledge, and finally realizes open evolution through the control of other subsystems.
However, it is challenging for the existing research ideas to develop high-level autonomous driving. Under the current framework, it is difficult for us to comprehensively list all driving situations and potential dangers that AVs will face. Furthermore, the complexity of the higher level and the implicit driving task of the high-level AV will make it difficult to demonstrate the completeness and correctness of safety requirements at each stage of the development of the high-level AVs. Therefore, it is not feasible to thoroughly test the system to ensure super reliable system operation, and the overall development from a system perspective will be of great significance for high-level AVs, especially Level 5.
《6. Conclusions》
6. Conclusions
Improving the intelligence of AVs has recently seen rapid growth in interest. This has come with some level of confusion with regard to how high-level AVs can be achieved, the feasible solution to task-driven or scenario-driven frameworks, and how the unified principles can make a difference. In this paper, we have sought to distinguish these issues by analyzing the existing developing techniques for high-level autonomous driving, comparing the differences between Level 4 and Level 5. Finally, we propose the unified principles and a feasible approach to achieve Level 5 in developing AVs.
Specifically, we consider the theory of system science as the core concept of developing an autonomous driving system and regard an AV as an intelligent living body capable of selflearning, self-adaptation, and self-transcendence. As a result of clarifying the foundation of driving, a coordination and balance framework based on the brain–cerebellum–organ concept and a hybrid model relying on the crow inference and parrot imitation research paradigm can provide a new perspective in developing high-level AVs. Furthermore, a feasible way to develop the brainlike system module is proposed by considering it as a hybrid framework combining the advantages of autonomous learning and prior knowledge, which can support AVs in complex environments to achieve fully autonomous driving. A feasible way to develop the situational awareness module is proposed, implying the concept of establishing a unified safety field, which could support AVs to achieve accurate risk assessment under the condition of multifactor coupling. Moreover, a decision-making and control module based on the principle of the least action can provide a brand-new concept of developing Level 5 AVs from a systematic perspective.
Through these analyses, we conclude that scenario-driven and task-driven research concepts are challenging to achieve Level 5 AVs, but the system, combined with the principles proposed, can provide a new approach for developing high-level AVs. We hope that under the guidance of this research paradigm, it is possible to break through the limitations of existing technologies and achieve high-level autonomous driving.
《Acknowledgements》
Acknowledgements
This work was jointly supported by the National Science Fund for Distinguished Young Scholars (51625503), the National Natural Science Foundation of China, the Major Project (61790561), the Joint Laboratory for Internet of Vehicle, Ministry of Education, China Mobile Communications Corporation.
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Jianqiang Wang, Heye Huang, Keqiang Li, and Jun Li declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




