
《1 前言》
1 前言
基于柔性机械臂( FMs )的外科手术机器人是近期研究的一个热点,并有可能引发机器人微创于术( MIRS)[1]的革命。与以达芬奇外科手术机器人系统为代表的传统刚性臂外科手术机器人相比,它们的优点包括:①在手术介入治疗过程中更为安全;②在人体内的工作范围更大;③无需围绕套管针转动即可在人体内操作。这也促使 Intuitive Surgical 公司研发最新型的具有柔性机械臂的手术机器人( da Vinci SP ) [2]。
目前的柔性机械臂主要分为两大类:一类是拉线驱动机械臂( TM ),该机械臂的柔性骨架可以呈蛇形( TSM)[3,4 ]或连续型( TCM) [5, 6],另一类是同心管机械臂(CTM) [7,8]。在传统的 τM 内,柔性骨如画过肌臆(或称为绳索或线[9])控制弯曲。骨架的曲率是可控的,但可弯部分的长度则是固定的。对于CTM,通过移动、旋转控制内、外预弯曲套管的相对位置,柔性结构的形状可以得到控制。由于套管的曲率是固定的 CTM 末端的曲率无法控制 现有机构中对柔性弯曲部分的有限控制导致机器人工作空间狭小,同时也限制了灵巧度。尽管部分问题可以通过引人更多的弯曲段来解决,但却使系统变得更加复杂。HARP 机器人[10]采用两个同心 TM,该τM 可以弯曲成任何理想形状,但是, HARP 机器人的移动速度很慢。由于柔性骨架的刚度较低, FM 的另一个共同缺陷是有效载荷能力有限。现有阳的缺陷使得人们更需要一种新型的 FM 设计。在这种设计中,柔性弯曲段的曲率和长度都需要可控,并且骨架刚度也应该适应不同的作业需求。
本文介绍了一种新型 TSM 设计 设计中采用约束管来扩大工作空间同时提升灵巧度[11, 12]。该机构被称为约束型盹形拉线机构( CTSM )。 CTSM 的刚度可通过两种方式调节,一个与传统 TSM[13]类似,通过同时控制驱动线的拉力来调节,另一个是通过控制柔性弯曲段的长度来调节。利用该机构,笔者做了一个 CTSM 机器人样机。该机器人可以通过采用 Novint Falcon 触觉设备[14]来远程操控。运动控制模式有两种:直接映射模式和增量模式。本文所用的结果是根据笔者已被接收的会议论文[15]改编而来。论文其余内容组织如下:第2节介绍了柔性机器人系统的设计和远程操作方案;第3节进行了运动学建模;第4节介绍了机器人的最优控制方式;第5节介绍了机器人原型和实验结果;第6节对论文进行了总结。
《2 柔性机器人系统》
2 柔性机器人系统
柔性机器人由机器人结构、微型控制器和输入设备( Novint Falcon 触觉设备)组成。
《2.1 柔性机器人的机械设计》
2.1 柔性机器人的机械设计
机器人结构设计如图1所示。该结构由两部分组成:一个是 CTSM ,另一个是驱动模块。CTSM 设计是基于之前的 TSM 设计[3,4]研发而成。它包括一串短的椎骨,其中相邻两个椎骨形成一个关节,以及一套驱动线、一个弹性管和一个约束管。关节的转动由驱动线控制,其中各个关节之间的转动通过弹性管约束。在CTSM 中,关节的数量可以任意增减,而不需改变驱动线的数目。约束管与弹性管相比刚度高出很多,在配置上与弹性管同心,且可沿着由椎骨和弹性管组成的柔性骨架移动。由于约束管刚度很大,所以在柔性骨架内,与约束管相由于约束管刚度很大,所以在柔性骨架内,与约束管相互重叠的部分不能转动。其余部分(柔性弯曲段)可以通过驱动线弯曲。因此,可以通过控制约束管的位置来控制柔性弯曲段的长度。驱动模块由两个伺服电机和两个步进电机组成。如图1中所示,这两个伺服电机通过驱动线来控制 CTSM 的弯曲:“Servo motor-V”控制上/下弯曲,“Servo motor-H,,控制左/右弯曲。约束管由Stepper-C”控制,而机器人底座则由“Stepper-B ”来控制。
《 图1》
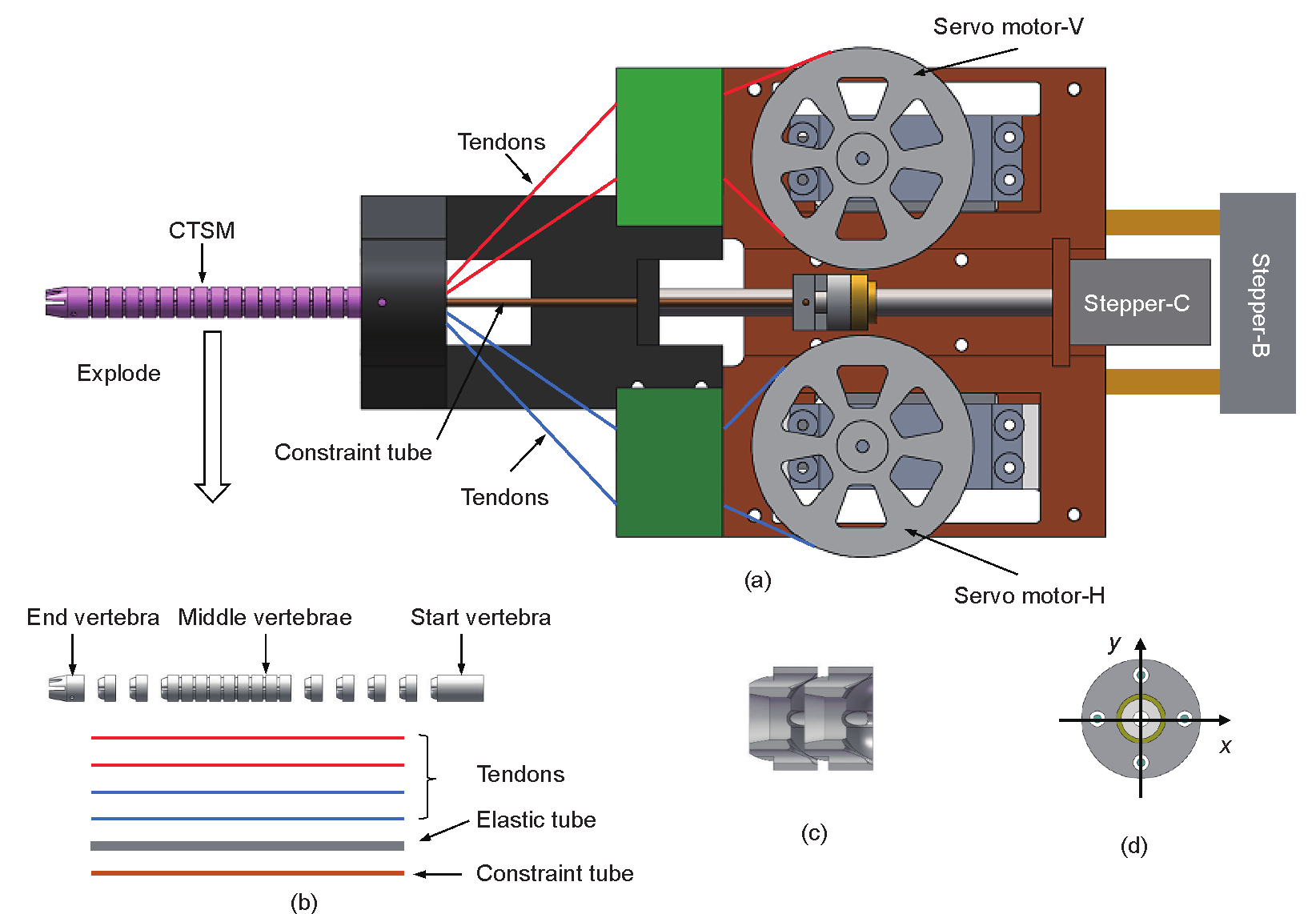
图1. 柔性外科手术机器人的机械设计。(a)约束型蛇形拉 机构(CTSM); (b) CTSM 分解图;(c)关节横截面图;(d)驱动线构造。
CTSM 的弯曲运动如图2所示。在图2中,约束管自底座向柔性骨架的远端移动,如图2(a)~(c)所示。黄色高亮方块代表受约束的椎骨 椎骨弯曲期间,末端的轨线由驱动线和约束管控制。需要注意的是,当约束管固定不动时, CTSM 的弯曲运动与 TSM 相同。
《图2》
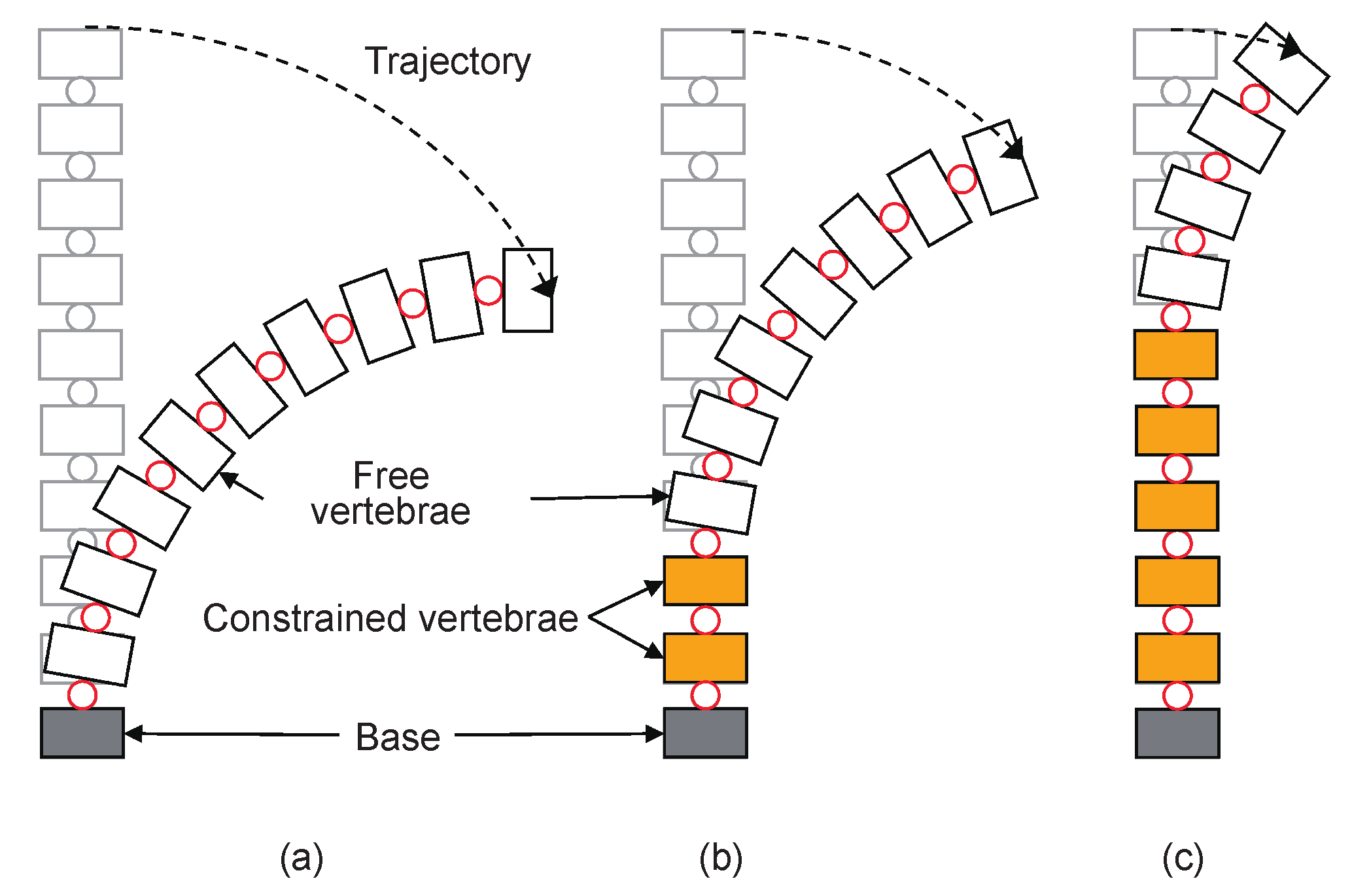
图2.CTSM 弯曲运动图示。
《2.2 远程操作方案》
2.2 远程操作方案
机器人采用 Novint Falcon [14]来控制, Novint Falcon是一个低成本的触觉设备,可以提供把于的空间三维位置。远程操作方案如图3所示。Novint Falcon 用作主控制器。Novint Falcon 的把手位置被传送至 ,通过程序来计算电机的控制输入。微型控制器( Arduino Mega 2560 )将控制输入转换成 PWM信号,用于控制电机运动。
,通过程序来计算电机的控制输入。微型控制器( Arduino Mega 2560 )将控制输入转换成 PWM信号,用于控制电机运动。
在该机器人上实施了两种控制模式。直接映射模式下, Novint Falcon 的工作空间通过一定的比例被映射到柔性机器人的工作空间内。 CTSM 的末端执行器持续跟踪把手的运动。增量模式下,通过结合把手上的按钮对机器人的运动实行增量移动。详细信息将在下一节描述。
《图3》
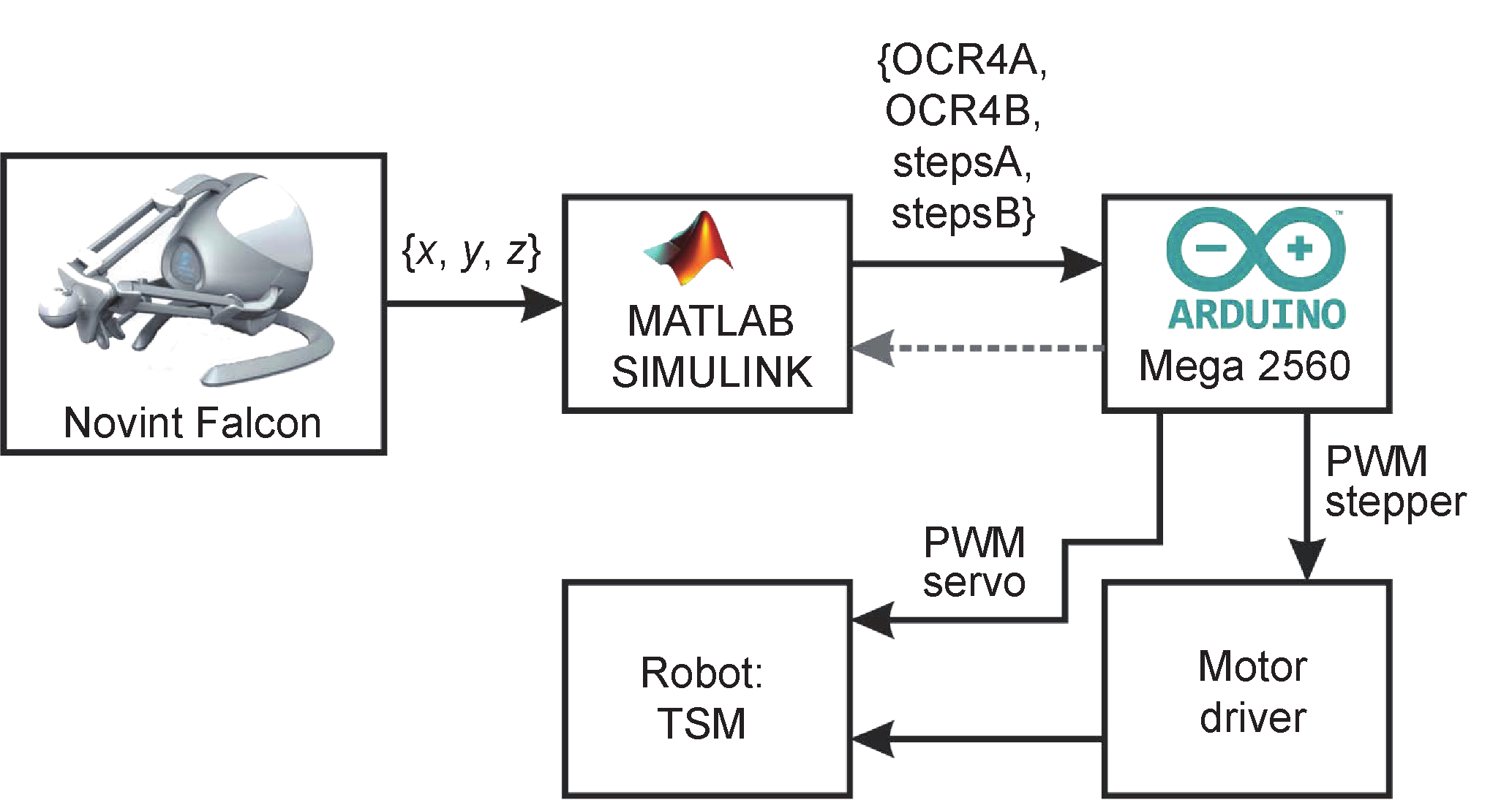
图3. 远程操作方案
《3 运动学模型》
3 运动学模型
《3.1 运动学模型》
3.1 运动学模型
运动学模型由4个映射组成,如图4所示。在机器人控制中,最基础的部分是“控制器-驱动器空间映射”(f4) 其可根据其他3个映射推导而得: “驱动器-关节空间映射”(f1 )、“关节任务空间映射”(f2 )和“任务-控制器空间映射”(f3)。以下给出了这些映射的数学模型,具体推导过程与笔者之前工作[3, 4, 11 ]中的推导类似。模型中,坐标系设置和命名如图5所示。
《图4》
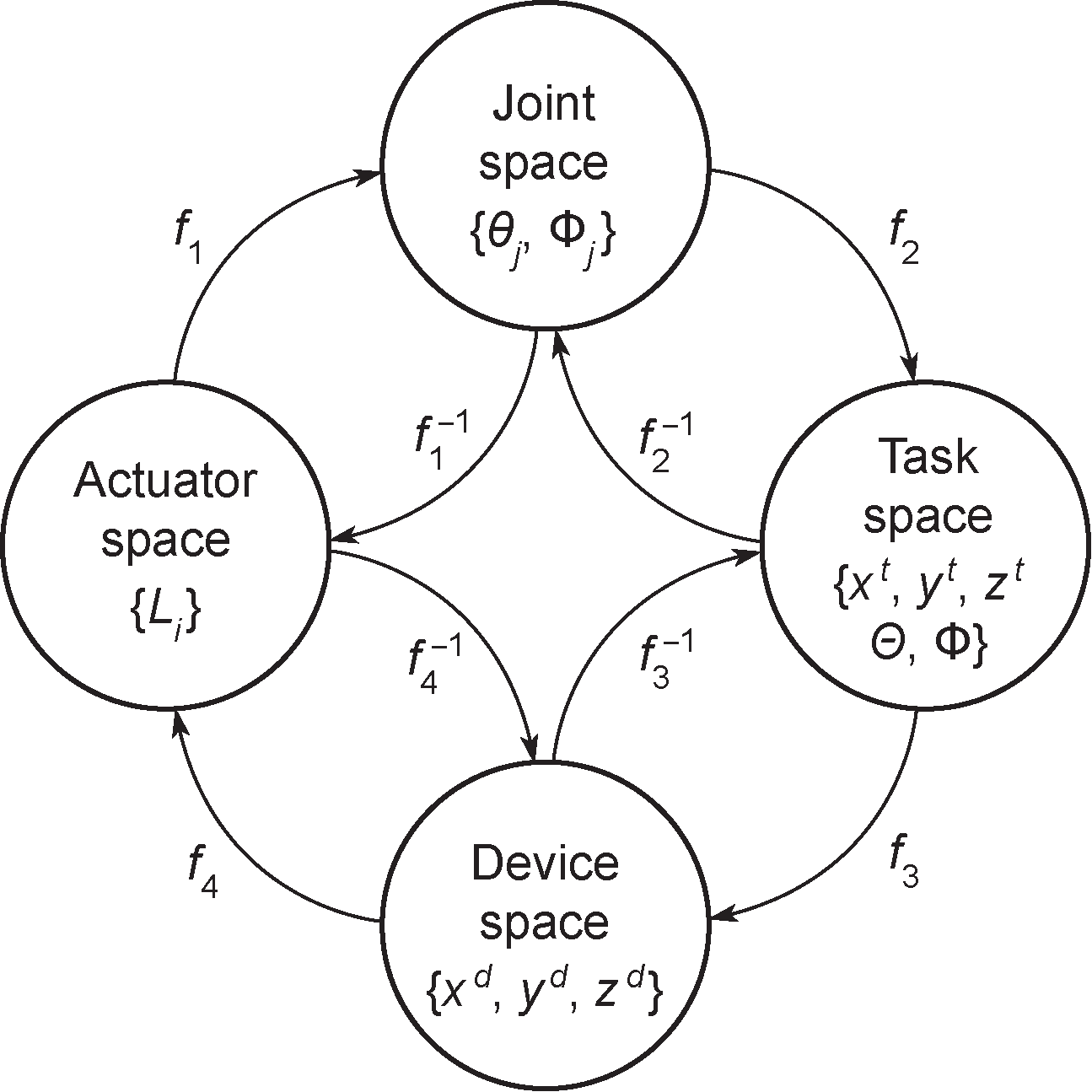
图4. 运动学映射。
《图5》

图5. 坐标设置和命名。
(1)驱动器-关节空间映射(f1):
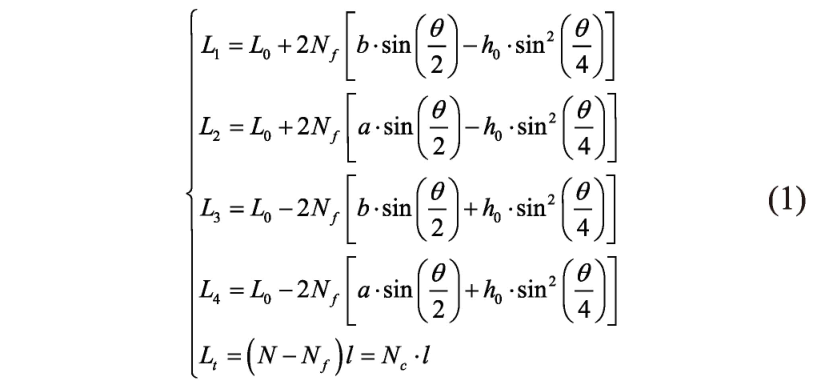
式(1)中, 为驱动线至弯曲中性面[3]之间的距离;
为驱动线至弯曲中性面[3]之间的距离; 为驱动线长度;
为驱动线长度; 为静止位置处关节间隙距离;d为一对驱动线之间的距离。
为静止位置处关节间隙距离;d为一对驱动线之间的距离。
(2)关节任务空间映射(f2):任务空间内 CTSM的末端位置 为
为
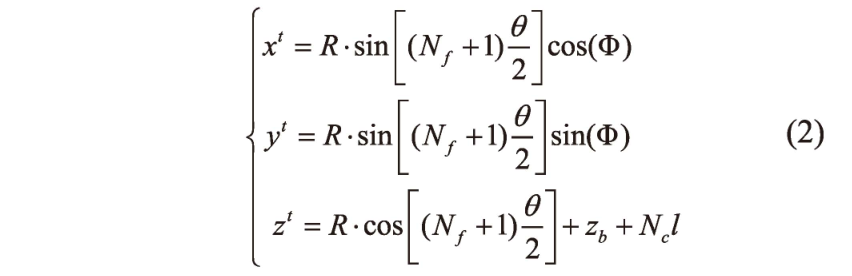
式(2)中,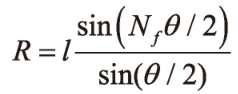 和
和 是指
是指 轴沿线的底座移动距离。
轴沿线的底座移动距离。
( 3)任务一控制器空间映射(f3):任务一控制器空间映射与远程操作中的 CTSM 运动控制具有直接关系。以下给出两种运动模式下的逆映射。在直接映射模式下,f3显而易见:

式(3)中,  为预想位置;向量
为预想位置;向量 包括比例因数。
包括比例因数。
在增量模式下, CTSM末端执行器只在辅助按钮按下时可以移动,且移动的距离与把于在辅助按钮松开前的行程成比例关系 其逆映射 如下:
如下:

《3.2 仿真结果》
3.2 仿真结果
通过计算机仿真,对传统 TSM和CTSM 进行比较。在仿真中, TSM和CTSM 两者都含有25个椎骨,总长度为 100 mm。最大关节转角为 7.2° 。图6所示为工作空间的比较结果。由图6可见,通过引入约束管,机械手的工作空间有非常明显的扩大。
《图6》

图6. 工作空间比较。(a)传统 TSM; (b) CTSM。
在灵巧度比较中,让机械手到达目标位置 (65,0,50)。图7所示为结果。 TSM 仅可以通过1种姿势到达目标点,而 CTSM 可以在5种姿势下到达。这表明在该位置, CTSM 的灵巧度是 TSM的5倍。需要注意的是,灵巧度与目标点的位置有关。在整个工作空间上, CTSM的平均灵巧度是 TSM的4.7倍。
(65,0,50)。图7所示为结果。 TSM 仅可以通过1种姿势到达目标点,而 CTSM 可以在5种姿势下到达。这表明在该位置, CTSM 的灵巧度是 TSM的5倍。需要注意的是,灵巧度与目标点的位置有关。在整个工作空间上, CTSM的平均灵巧度是 TSM的4.7倍。
《图7》
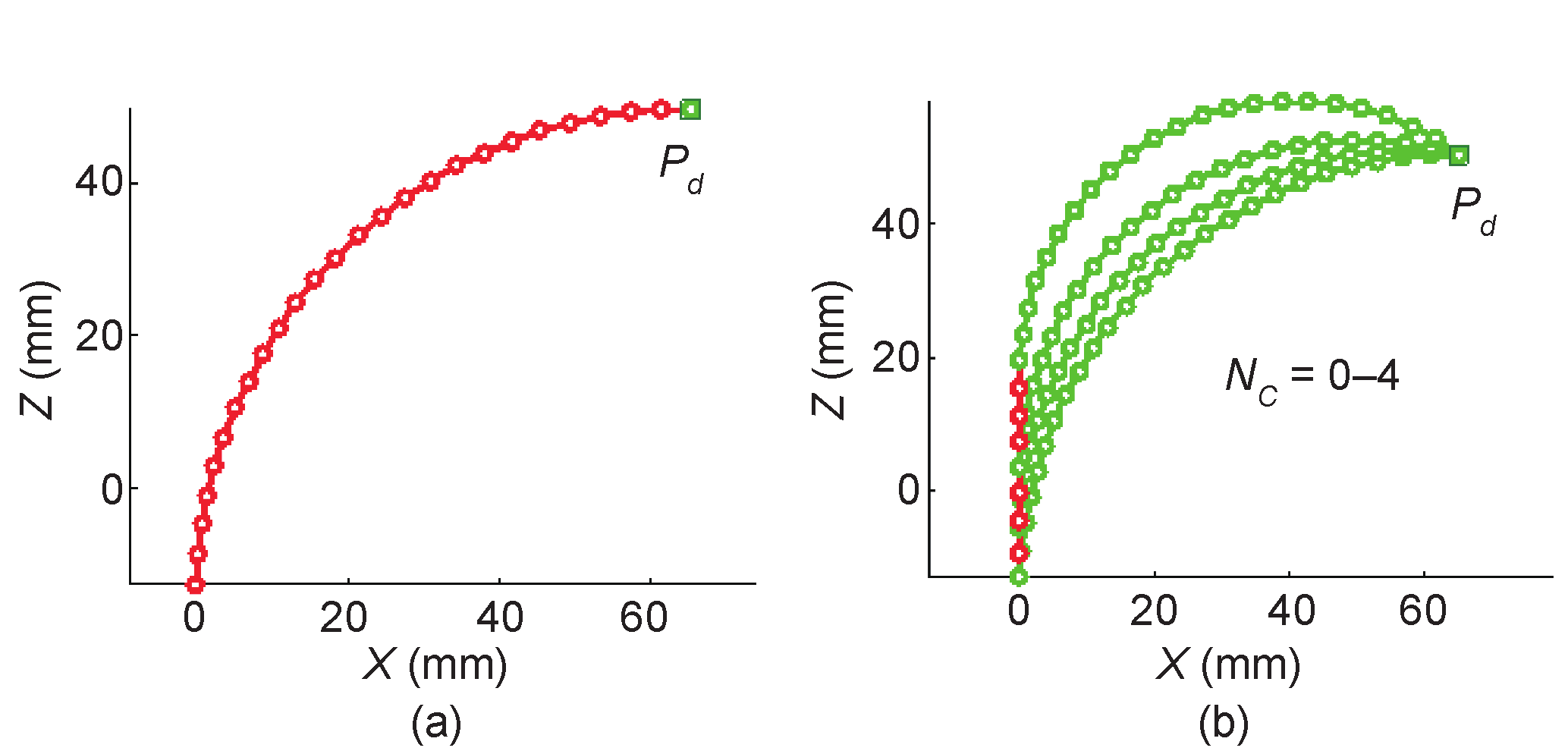
图7. 灵巧度比较。(a)传统 TSM; (b) CTSM。
《4 最优控制方案》
4 最优控制方案
根据上一节的论述可知, CTSM 有多个姿势可以到达目标点。这使得采用某种策略对机器人实施最优控制成为可能。本节提出了两种最优策略。
《4.1 最大刚度》
4.1 最大刚度
如前所述, CTSM 的刚度可以采用两种方式控制。本节着重介绍用以控制骨架弯曲姿势的方法。
CTSM 结构与悬臂梁类似,其刚度与骨架长度的立方成比例。因此,在最高刚度控制模式下,笔者选择弯曲段的最短长度。假设到达目标点的解集是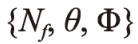 ,最佳解决方案为
,最佳解决方案为

式(5)中,  是指逆向运动中可能的解集。
是指逆向运动中可能的解集。
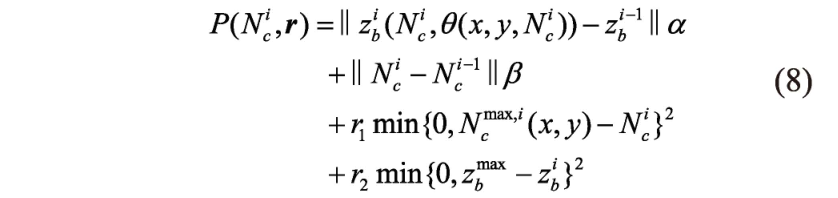
注意到 CTSM 底座是可移动的,同时 CTSM 可向各个方向弯曲且各向同性。因此,以上解集中解的数目仅取决于侧向位移。这可以提前先解出。根据上文模型可知侧向位移为

图8所示为土文仿真条件下得出的式(6)的解的个数分布。
《图8》
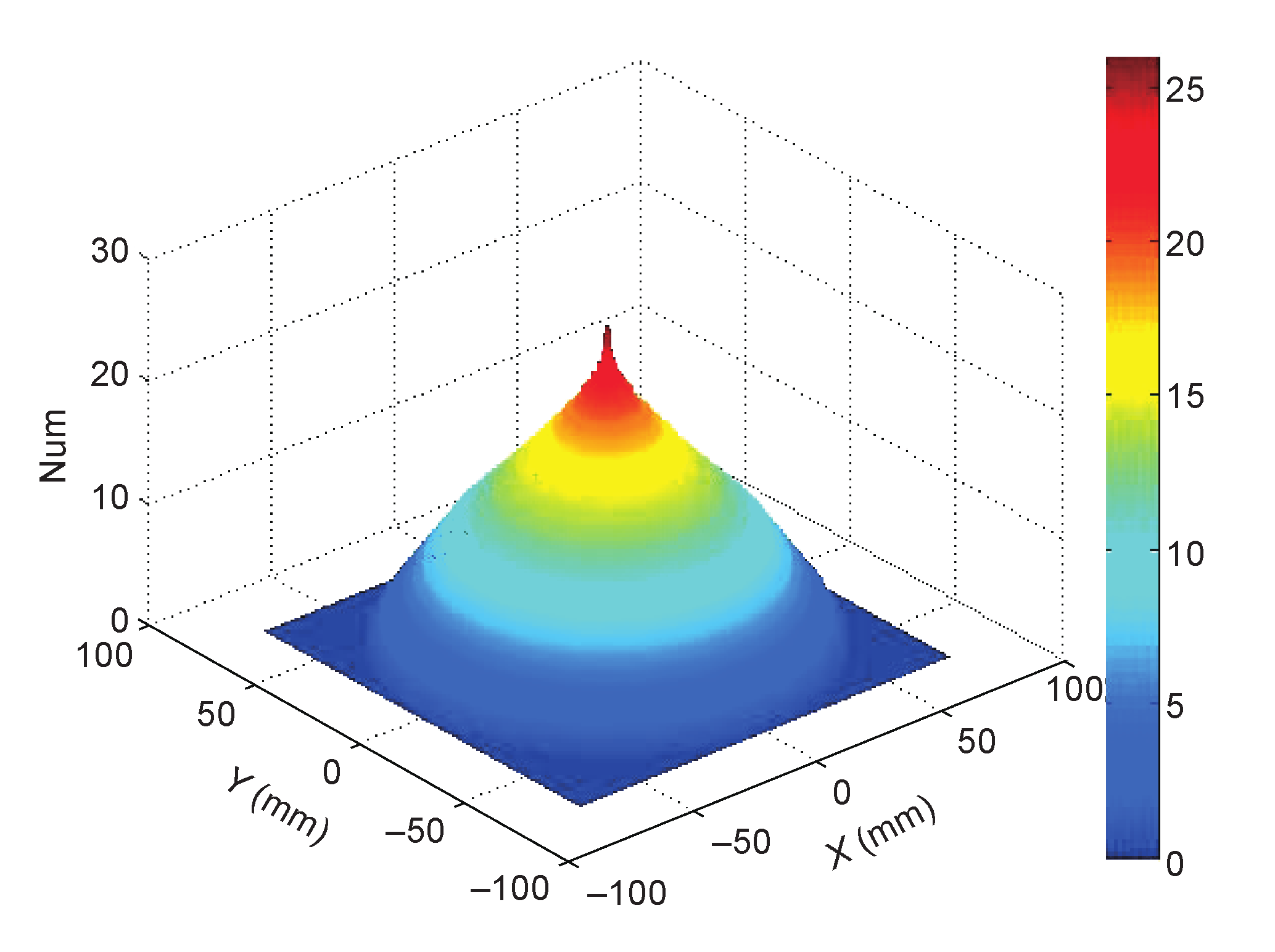
图8. N= 25 且l=4 时解的个数。
《4.2 最小运动》
4.2 最小运动
在最小运动情况下,采用罚函数来优化 。其包括各时间步长
。其包括各时间步长 的差值,包含惩罚因子
的差值,包含惩罚因子 和
和 的向量
的向量 ,以及两个权重因子α和β。α因子是主电机( Stepper-B )的步长比例,而卢因子则是降低约束电机( Stepper-C )移动量的权重因子。边界极小问题的约束条件为
,以及两个权重因子α和β。α因子是主电机( Stepper-B )的步长比例,而卢因子则是降低约束电机( Stepper-C )移动量的权重因子。边界极小问题的约束条件为

采用式(7)约束条件和权重因子,建立以下罚函数:
采用 Nelder-Mead Simplex (NM)单纯形算法[16],可以解出式(8)的最小值:

《5 原型样机和实验结果》
5 原型样机和实验结果
基于 CTSM 的原型样机如图9所示 椎骨的外直径为7.5 mm 在椎骨中心有一个3mm 的通孔,用于穿过弹性管和约束管。每一根椎骨的长度为 3.2mm 。两个相连椎骨形成一个关节,每个关节可以旋转 7.25° 。椎骨数量可根据需要改变。在以下实验中, CTSM 共有 20 个椎骨。CTSM 通过4个电机控制:两个伺服电机控制弯曲运动,一个步进电机控制约束管的移动,另一个步进电机控制CTSM 底座的移动。
《图9》
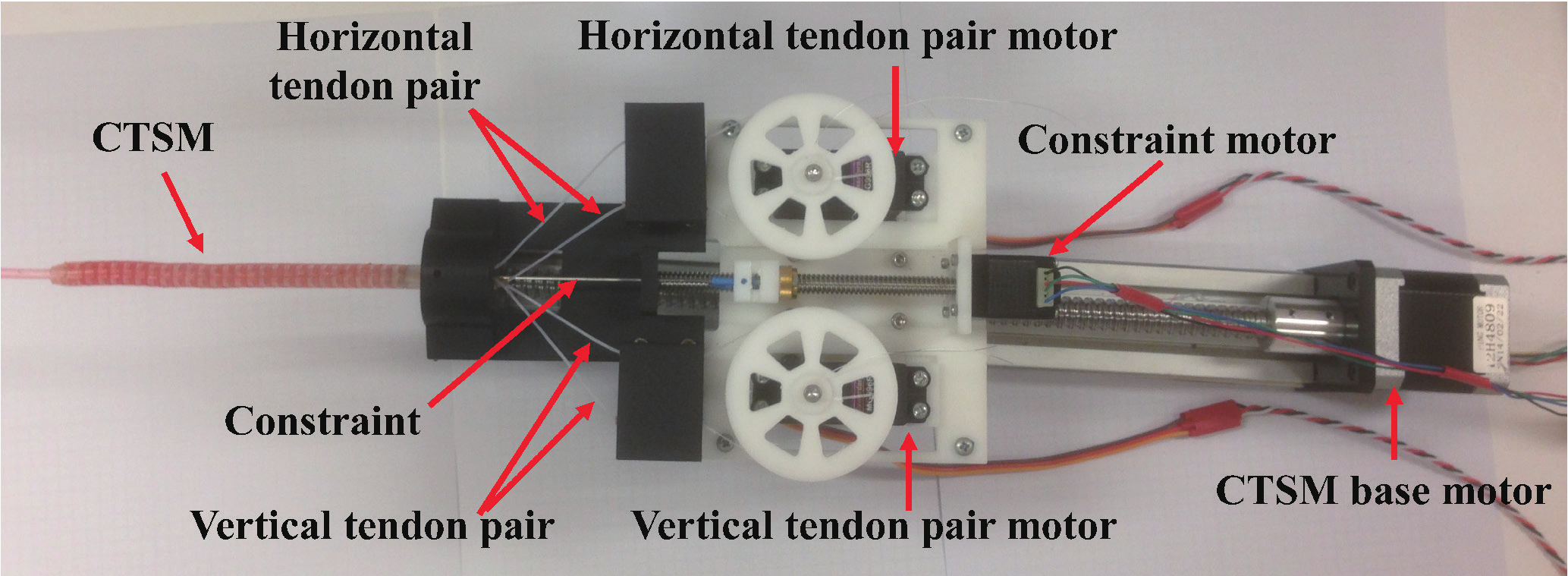
图9. 柔性机器人原型。
通过3个实验来验证 CTSM 的性能。第一个是在约束空间内到达日标点,第二个是负重实验。在这两个实验中,采用4种模式来控制机器人:①最大刚度+直接映射模式;②最小运动[α=1 ,β= 25] +直接映射模式;③最小运动[α=10 ,β= 1] 直接映射模式;④最大刚度+增量模式。在第三个实验中,通过模仿经鼻腔外科手术,控制CTSM 进入鼻腔。
实验1:在约束空间内到达目标点。控制 CTSM ,从初始位置开始在约束空间内到达3个目标点,如图 10 (a)所示。塑料瓶瓶口用于模仿微创手术中的套管针,目标点模仿 MIRS 的手术部位。图 11 所示为4种控制模式下CTSM 末端执行器的轨迹。图中,3个十字标志代表目标点,圆点代表不同运行时间(时间与底部彩条图例相对应)下 CTSM 末端的位置。相邻两点之间的时间间隔为1s根据结果可以看出, CTSM在4种模式下都可以成功到达3个目标点附近。模式③耗费的时间最短(29 s) ,模式①下耗费的时间最长(47s) 。就准确度而言,模式②和模式④比模式①和③更好。在MIRS 内,准确度比速度更重要。因此,增量模式比直接映射模式更适合在MIRS 中采用。最小运动方案可帮助提高直接映射模式下的定位精度。
《图10》
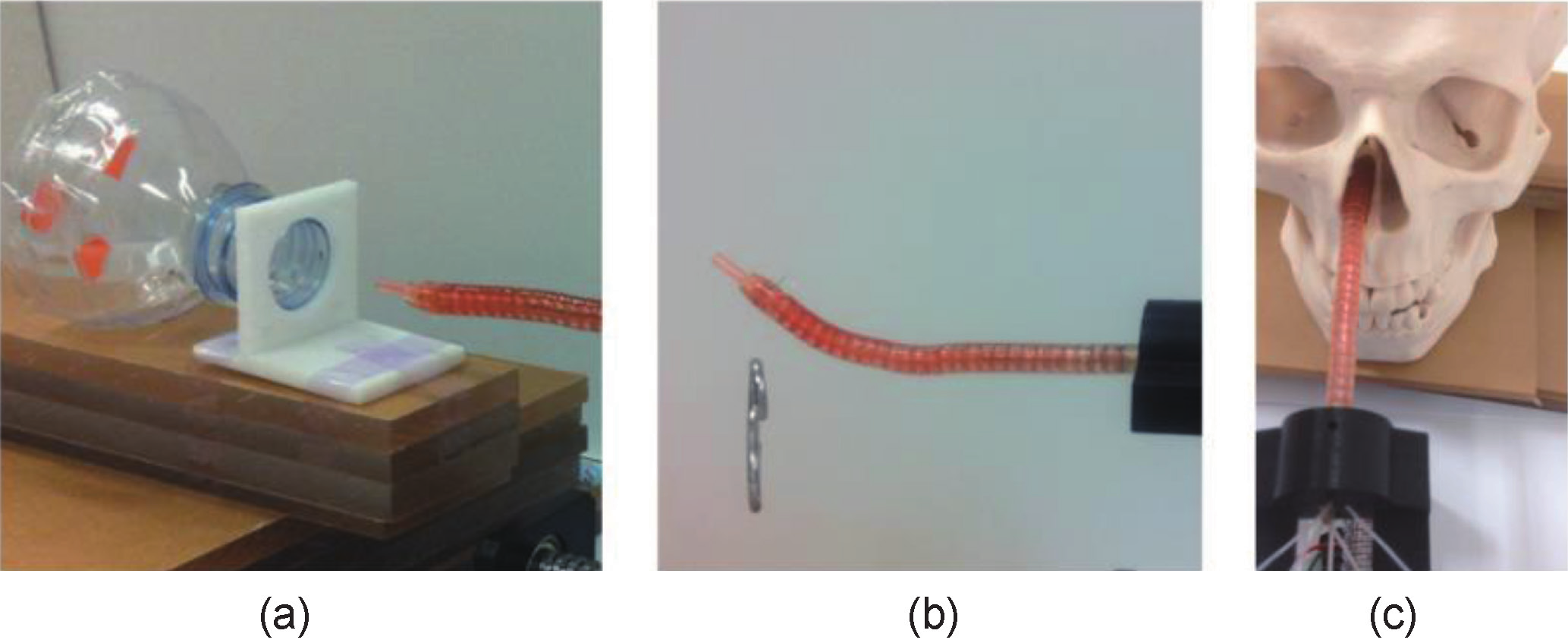
图10. 实验测试。(a)约束空间内到达目标点;(b)负责实验;(c)鼻腔检查实验。
《图11》

图11. 实验1中4种控制模式下的远端轨线。(a)最大刚度 +直接映射模式;(b)最小运动[α=1 ,β=25]+ 直接映射模式;(c)最小运动[α=10 ,β=1]+直接映射模式;(d)最大刚度+增量模式。
实验2:负重实验。控制 CTSM 至目标点位置,然后将 10g 的重物放置在 CTSM 末端上,如图 10 (b)所示。在随机移动 15s之后,控制 CTSM 再次逼近目标点。在图12 中对骨架变形进行比较。在图中,绿色区域为负重变形后的骨架,浅蓝色区域为无负重时骨架形状。在图12(a)模式下, CTSM 到达目标点时的误差很小。在图12(d)模式下,变形稍大但是依然很小。在图 12(b)模式和图 12(c)模式下,骨架变形比最大刚度模式下的变形大许多。图 12(b)模式实际上是最小刚度模式,在该模式下骨架的变形最大。
《图12》
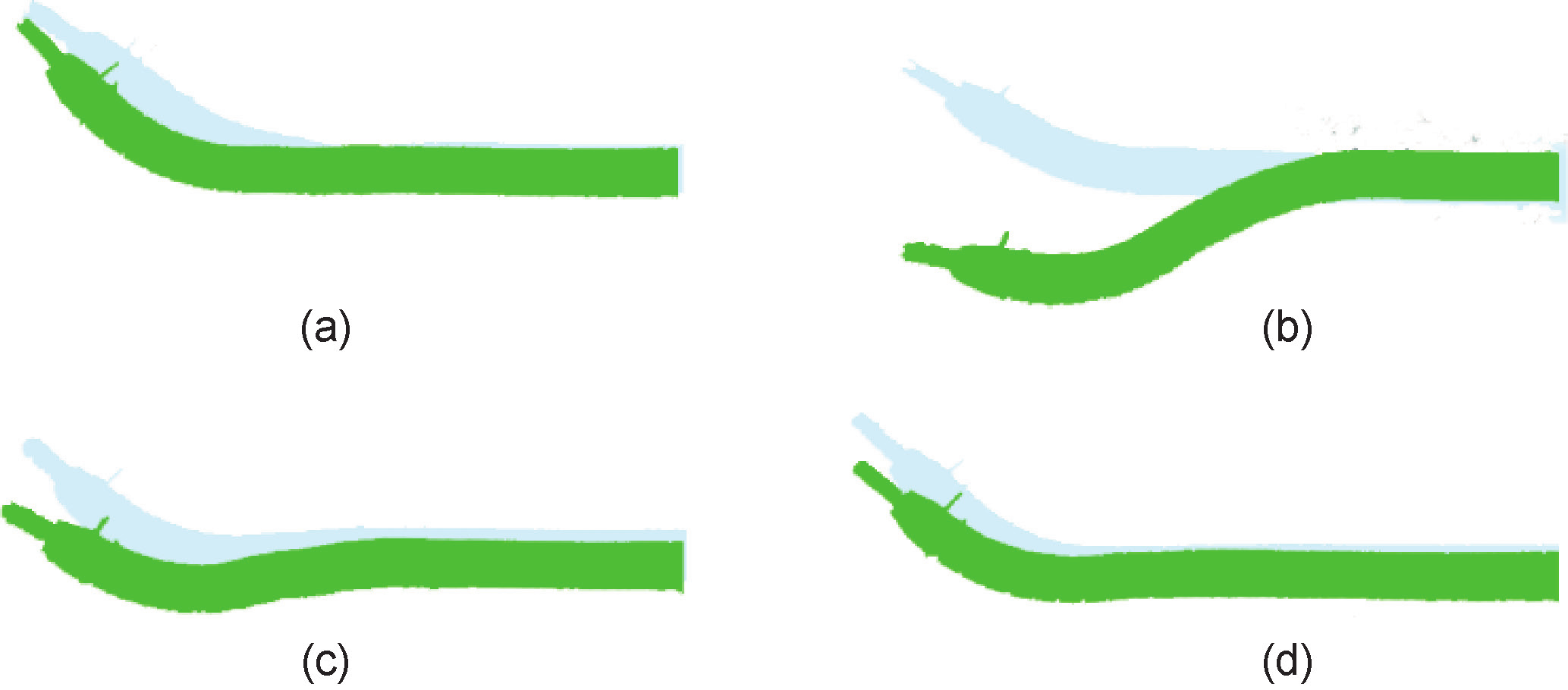
图12. 负重前后 CTSM 变形比较(浅蓝色为无负重时骨架变形;绿色为负重下骨架变形)。(a)最大刚度+直接映射模式;(b)最小运动[α=1 ,β=25]+ 直接映射模式;(c)最小运动[α=10 ,β=1]+直接映射模式;(d)最大刚度+增量模式。
实验3:鼻腔检查。 控制 CTSM 进入一个头骨模型中的鼻腔实施检查 ,如图 10 (c)所示。两种控制模式都进行了测试。实验表明在直接映射模式下, CTSM 可以快速移动并靠近鼻孔,但是由于操作人员于部颤抖,难以准确指向并进入鼻孔。另一方面,在增量模式下, CTSM靠近鼻孔较为缓慢,但更易于进入鼻孔并且在鼻腔内能够更好地操控。因此,最好的方式是综合这两种模式。图13 所示为实验过程中 CTSM 在鼻腔内的图片。在检查期间, CTSM 无需像达芬奇机器人那样将机械臂围绕进入点进行旋转。由于鼻孔狭窄并细长,减少转动可以减少对鼻孔的损伤。
《图13》
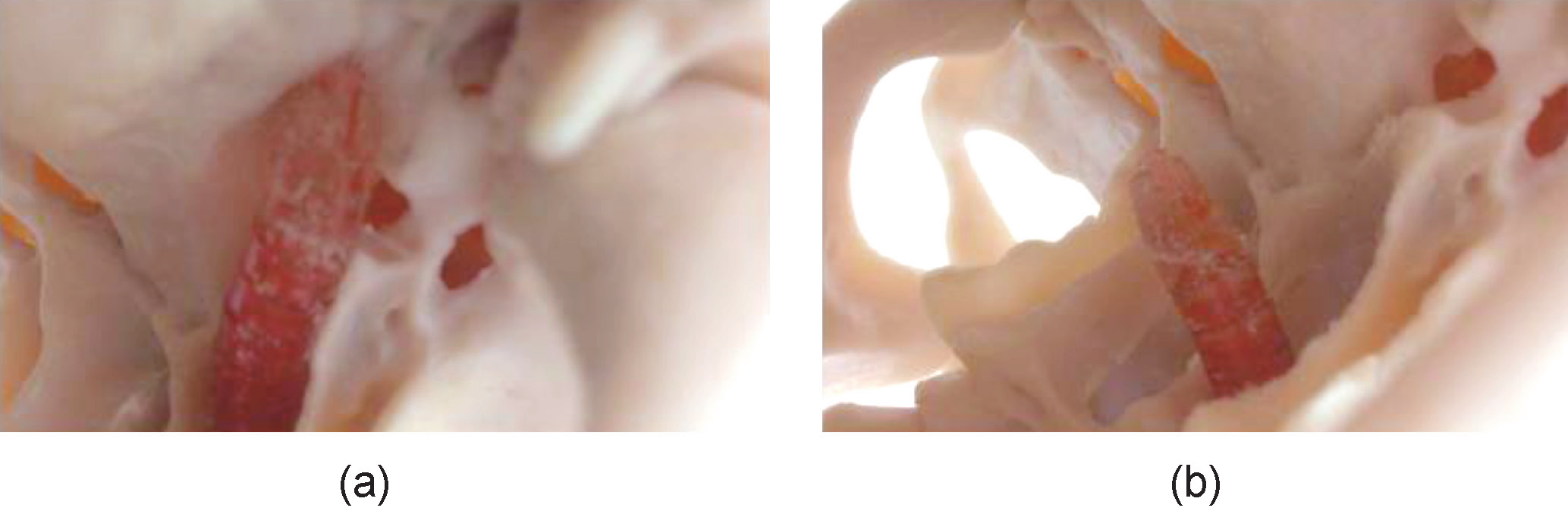
图13. CTSM 对鼻腔选行检查。
《6 结论》
6 结论
本文介绍了一种基于新型约束型蛇形拉线机构( CTSM )的远程操作柔性机器人。在 CTSM 内,柔性弯曲段的长度和曲率都可以主动控制。由此带来的优点包括扩展工作空间、提高灵巧度和刚度可控。本文采用了两种远程操控模式,并对其进行了评估。直接映射模了两种远程操控模式,并对其进行了评估。直接映射模动控制更为准确。通过将不同的末端执行器,如微型摄像头、钳子、慑子等安装在该机器人上,可以衍生出用于机器人辅助微创手术( MIRS )的柔性机器人。
《致谢》
致谢
本研究由新加坡国立大学FRC Tier I ( R397000156112,R397000157112 )项目资助。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Zheng Li, Jan Feiling, Hongliang Ren, and Haoyong Yu declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




