
2022, Volume 12, Issue 5
Engineering >> 2022, Volume 12, Issue 5 doi: 10.1016/j.eng.2021.10.016
Explosive Electric Actuator and Control for Legged Robots
a School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China
b Beijing Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology, Beijing 100081, China
c Key Laboratory of Biomimetic Robots and Systems, Ministry of Education, Beijing 100081, China
d Department of Mechanical and Intelligent Systems Engineering, The University of Electro-Communications, Tokyo 182-8585, Japan
Next Previous
Abstract
Unmanned systems such as legged robots require fast-motion responses for operation in complex environments. These systems therefore require explosive actuators that can provide high peak speed or high peak torque at specific moments during dynamic motion. Although hydraulic actuators can provide a large force, they are relatively inefficient, large, and heavy. Industrial electric actuators are incapable of providing instant high power. In addition, the constant reduction ratio of the reducer makes it difficult to eliminate the tradeoff between high speed and high torque in a given system. This study proposes an explosive electric actuator and an associated control method for legged robots. First, a high-power-density variable transmission is designed to enable continuous adjustment of the output speed to torque ratio. A heat-dissipating structure based on a composite phase-change material (PCM) is used. An integral torque control method is used to achieve periodic and controllable explosive power output. Jumping experiments are conducted with typical legged robots to verify the effectiveness of the proposed actuator and control method. Single-legged, quadruped, and humanoid robots jumped to heights of 1.5, 0.8, and 0.5 m, respectively. These are the highest values reported to date for legged robots powered by electric actuators.
Figures
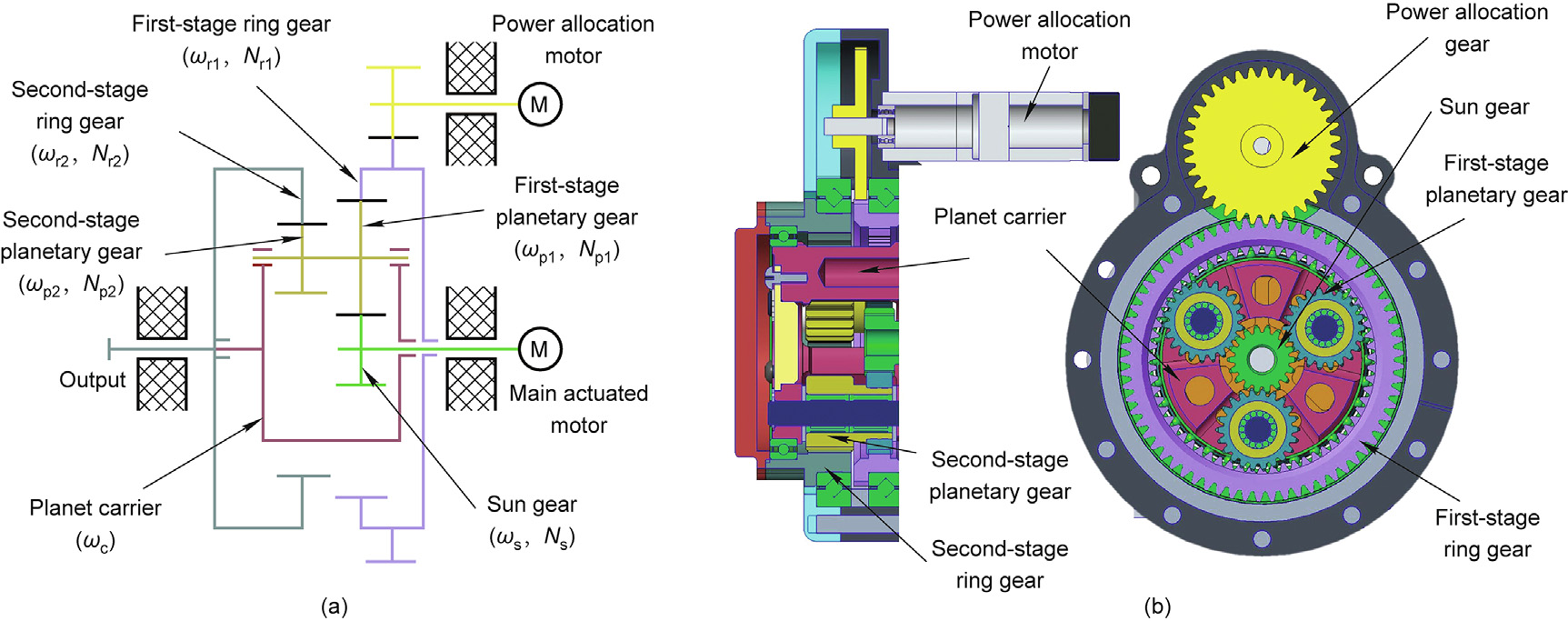
Fig. 1

Fig. 2
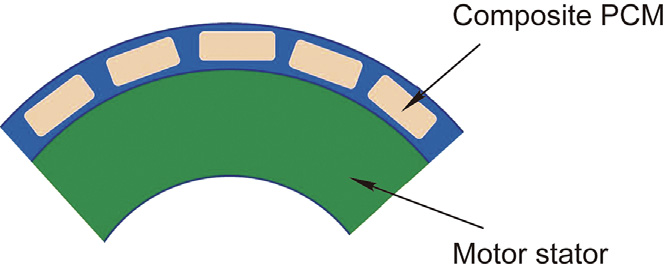
Fig. 3

Fig. 4
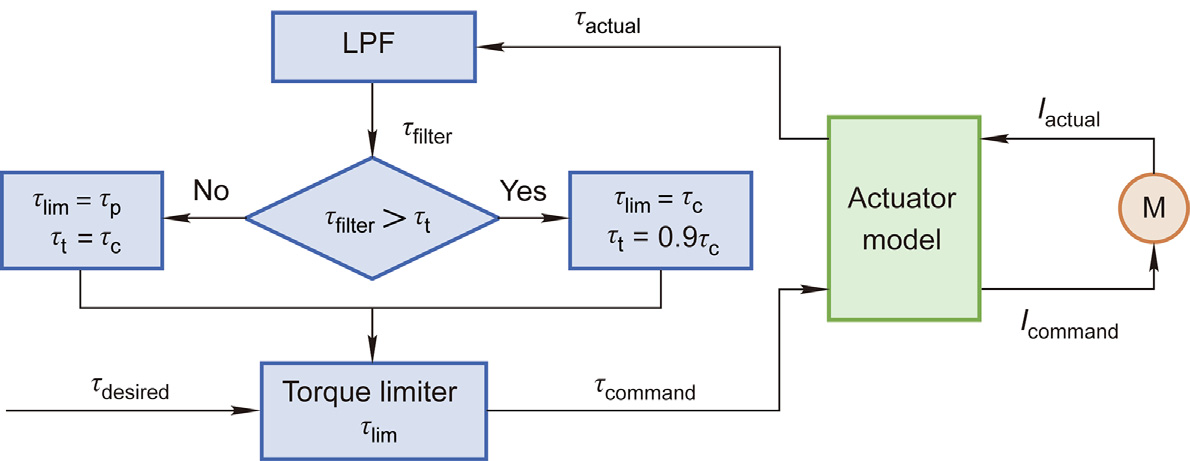
Fig. 5
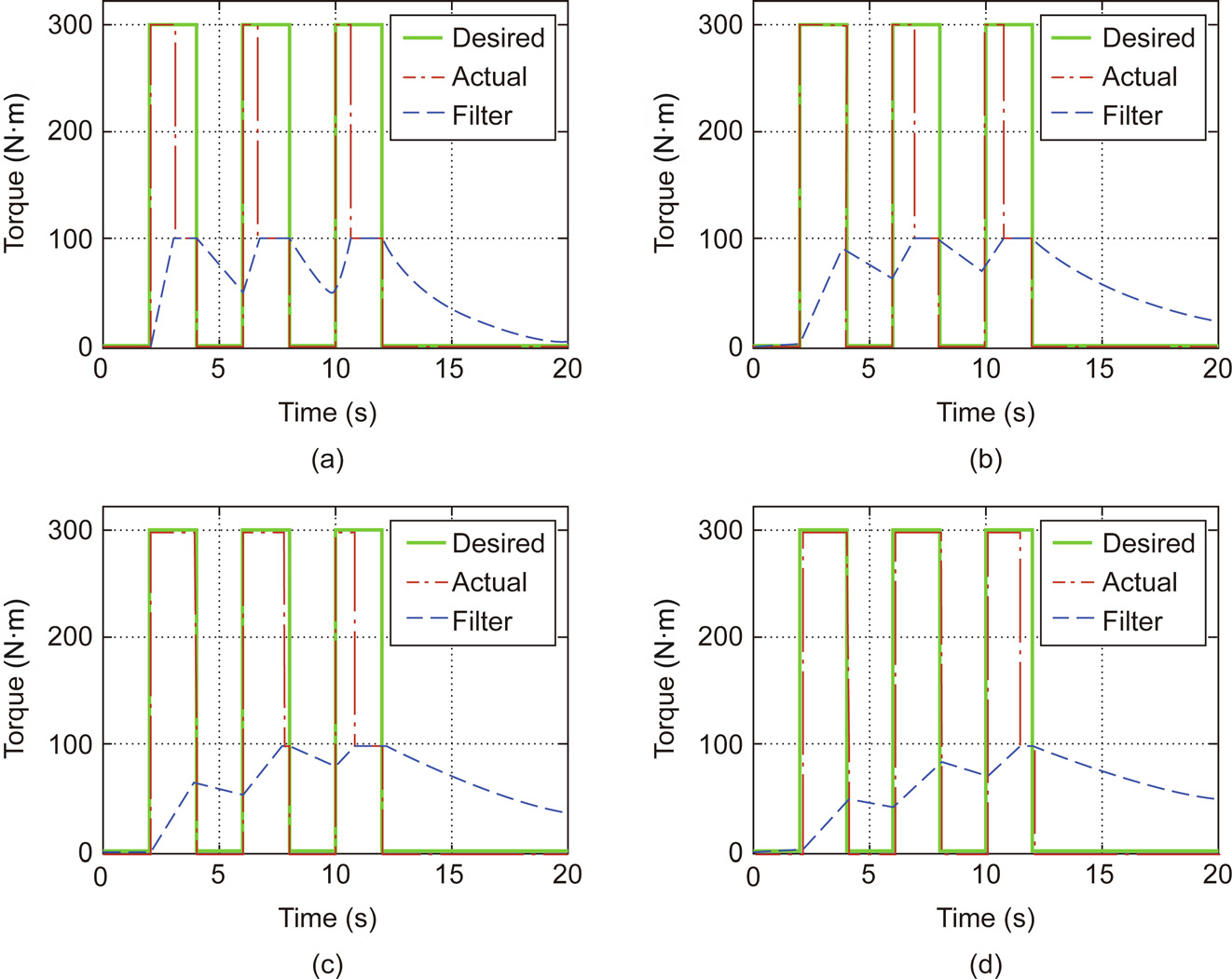
Fig. 6
Fig. 7
Fig. 8
Fig. 9
Fig. 10

Fig. 11

Fig. 12
Fig. 13

Fig. 14
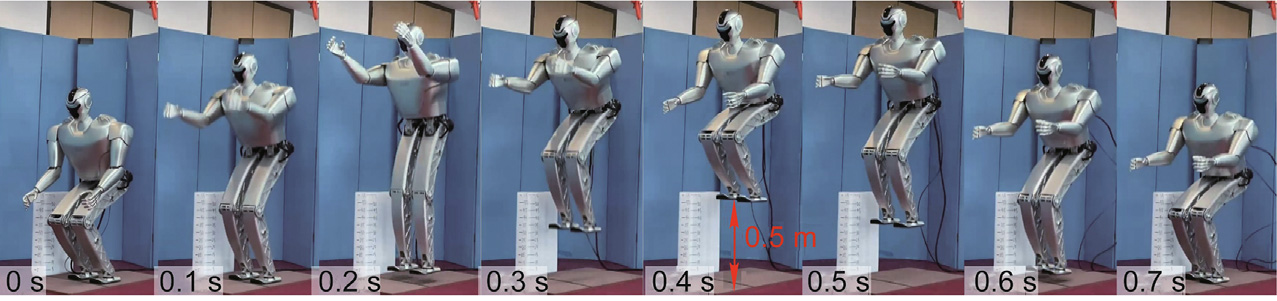
Fig. 15
References
[ 1 ] Zhong RY, Xu X, Klotz E, Newman ST. Intelligent manufacturing in the context of Industry 4.0: a review. Engineering 2017;3(5):616–30. link1
[ 2 ] Lee J, Hwangbo J, Wellhausen L, Koltun V, Hutter M. Learning quadrupedal locomotion over challenging terrain. Sci Robot 2020;5(47):ebac5986. link1
[ 3 ] Yu Z, Zhou Q, Chen X, Li Q, Meng L, Zhang W, et al. Disturbance rejection for biped walking using zero-moment point variation based on body acceleration. IEEE Trans Ind Informat 2019;15(4):2265–76. link1
[ 4 ] bostondynamics.com [Internet]. Boston Dynamics; c2021 [cited 2021 Feb 15]. Available from: https://www.bostondynamics.com/atlas. link1
[ 5 ] Hutter M, Gehring C, Jud D, Lauber A, Bellicoso CD, Tsounis V, et al. ANYmal—a highly mobile and dynamic quadrupedal robot. In: Proceedings of 2016 IEEE/ RSJ International Conference on Intelligent Robots and Systems (IROS); 2016 Oct 9–14; Daejeon, Republic of Korea. New York: IEEE; 2016. p. 38–44.
[ 6 ] Kaneko K, Kaminaga H, Sakaguchi T, Kajita S, Morisawa M, Kumagai I, et al. Humanoid robot HRP-5P: an electrically actuated humanoid robot with highpower and wide-range joints. IEEE Robot Autom Lett 2019;4(2):1431–8. link1
[ 7 ] Seok S, Wang A, Otten D, Kim S. Actuator design for high force proprioceptive control in fast legged locomotion. In: Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2012 Oct 7–12; Vilamoura-Algarve, Portugal. New York: IEEE; 2012. p. 1970–5.
[ 8 ] Seok S, Wang A, Chuah MY, Hyun DJ, Lee J, Otten DM, et al. Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot. IEEE/ASME Trans Mechatronics 2015;20(3):1117–29. link1
[ 9 ] Park HW, Park S, Kim S. Variable-speed quadrupedal bounding using impulse planning: untethered high-speed 3D running of MIT Cheetah 2. In: Proceedings of 2015 IEEE International Conference Robotics and Automation (ICRA); 2015 May 26–30; Seattle, WA, USA. New York: IEEE; 2015. p. 5163–70.
[10] Bledt G, Powell MJ, Katz B, Di Carlo J, Wensing PM, Kim S. MIT Cheetah 3: design and control of a robust, dynamic quadruped robot. In: Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2018 Oct 1–5; Madrid, Spain. New York: IEEE; 2018. p. 2245–52.
[11] Wensing PM, Wang A, Seok S, Otten D, Lang J, Kim S. Proprioceptive actuator design in the MIT Cheetah: impact mitigation and high-bandwidth physical interaction for dynamic legged robots. IEEE Trans Robot 2017;33(3):509–22. link1
[12] Sakagami Y, Watanabe R, Aoyama C, Matsunaga S, Higaki N, Fujimura K. The intelligent ASIMO: system overview and integration. In: Proceedings of IEEE/ RSJ International Conference on Intelligent Robots and Systems; 2002 Sep 30– Oct 4; Lausanne, Switzerland. New York: IEEE; 2002. p. 2478–83.
[13] Hubicki C, Grimes J, Jones M, Renjewski D, Spröwitz A, Abate A, et al. ATRIAS: design and validation of a tether-free 3D-capable spring-mass bipedal robot. Int J Robotics Res 2016;35(12):1497–521. link1
[14] Chen X, Yu Z, Zhang W, Zheng Y, Huang Q, Ming A. Bioinspired control of walking with toe-off, heel-strike, and disturbance rejection for a biped robot. IEEE Trans Ind Electron 2017;64(10):7962–71. link1
[15] Paine N, Mehling JS, Holley J, Radford NA, Johnson G, Fok CL, et al. Actuator control for the NASA-JSC valkyrie humanoid robot: a decoupled dynamics approach for torque control of series elastic robots. J Field Robot 2015;32(3): 378–96. link1
[16] Xiong X, Ames AD. Bipedal hopping: reduced-order model embedding via optimization-based control. In: Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2018 Oct 1–5; Madrid, Spain. New York: IEEE; 2018. p. 3821–8.
[17] Albu-Schäffer A, Haddadin S, Ott C, Stemmer A, Wimböck T, Hirzinger G. The DLR lightweight robot: design and control concepts for robots in human environments. Ind Robot 2007;34(5):376–85. link1
[18] Zhang C, Wang W, Xi N, Wang Y, Liu L. Development and future challenges of bio-syncretic robots. Engineering 2018;4(4):452–63. link1
[19] Rockenfeller R, Günther M. How to model a muscle’s active force-length relation: a comparative study. Comput Methods Appl Mech Eng 2017;313:321–36. link1
[20] Tomishiro K, Sato R, Harada Y, Ming A, Meng F, Liu H, et al. Design of robot leg with variable reduction ratio crossed four-bar linkage mechanism. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2019 Nov 3–8; Macao, China. New York: IEEE; 2019. p. 4333– 8.
[21] Cramer MN, Jay O. Biophysical aspects of human thermoregulation during heat stress. Auton Neurosci 2016;196:3–13. link1
[22] Kembaum AS, Kitchell M, Crittenden M. An ultra-compact infinitely variable transmission for robotics. In: Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA); 2017 May 29–Jun 3; Singapore. New York: IEEE; 2017. p. 1800–7.
[23] Naclerio ND, Kerst CF, Haggerty DA, Suresh SA, Singh S, Ogawa K, et al. Lowcost, continuously variable, strain wave transmission using gecko-inspired adhesives. IEEE Robot Autom Lett 2019;4(2):894–901. link1
[24] Verstraten T, Furnémont R, López-García P, Rodriguez-Cianca D, Vanderborght B, Lefeber D. Kinematically redundant actuators, a solution for conflicting torque-speed requirements. Int J Robotics Res 2019;38(5):612–29. link1
[25] Verstraten T, Furnémont R, Beckerle P, Vanderborght B, Lefeber D. A hopping robot driven by a series elastic dual-motor actuator. IEEE Robot Autom Lett 2019;4(3):2310–6. link1
[26] De Carlo M, Mantriota G. Electric vehicles with two motors combined via planetary gear train. Mech Mach Theory 2020;148:103789. link1
[27] Urata J, Nakanishi Y, Okada K, Inaba M. Design of high torque and high speed leg module for high power humanoid. In: Proceedings of 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); 2010 Oct 18–22; Taiwan, China. New York: IEEE; 2010. p. 4497–502.
[28] Kim D, Ahn J, Campbell O, Paine N, Sentis L. Investigations of a robotic test bed with viscoelastic liquid cooled actuators. IEEE/ASME Trans Mechatronics 2018;23(6):2704–14. link1
[29] Ahn J, Kim D, Bang S, Paine N, Sentis L. Control of a high performance bipedal robot using viscoelastic liquid cooled actuators. In: Proceedings of 2019 IEEERAS 19th International Conference on Humanoid Robots (Humanoids); 2019 Oct 15–17; Toronto, ON, Canada. IEEE Press; 2019. p. 146–53.
[30] Kolvenbach H, Hampp E, Barton P, Zenkl R, Hutter M. Towards jumping locomotion for quadruped robots on the moon. In: Proceedings of 2019 IEEE/ RSJ International Conference on Intelligent Robots and Systems (IROS); 2019 Nov 3–8; Macau, China; New York: IEEE; 2019. p. 5459–66.
[31] Roozing W, Li Z, Medrano-Cerda GA, Caldwell DG, Tsagarakis NG. Development and control of a compliant asymmetric antagonistic actuator for energy efficient mobility. IEEE/ASME Trans Mechatronics 2016;21(2):1080–91. link1
[32] Roozing W, Li Z, Caldwell DG, Tsagarakis NG. Design optimisation and control of compliant actuation arrangements in articulated robots for improved energy efficiency. IEEE Robot Autom Lett 2016;1(2):1110–7. link1
[33] Qi H, Chen X, Yu Z, Huang G, Meng L, Hashimoto K, Liao W, Huang Q. A vertical jump optimization strategy for one-legged robot with variable reduction ratio joint. In: Proceedings of 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids); 2021 Jul 19–21; Munich, Germany. New York: IEEE; 2021. p. 262–7.











 京公网安备 11010502051620号
京公网安备 11010502051620号




