
2005, Volume 7, Issue 7
Strategic Study of CAE >> 2005, Volume 7, Issue 7
An Improved BP Algorithm Applying to Inverse Kinematics Problems of Robot Manipulator
1. School of Electrical & Automation Engineering, Tianjin University, Tianjin 300072, China
2. Tianjin FAW Xiali Automobile Co. , Ltd. , Tianjin 300380, China
Next Previous
Abstract
In this paper, an algorithm in which active function is improved is proposed through analyzing the conventional BP algorithm, and different learning rates are used to increase the learning speed in each layer. The multilayer forward neural networks are used to establish the inverse kinematics models for robot manipulator by this improved BP algorithm. The simulations demonstrate that the proposed method is effective, and improves the inverse kinematics solutions for robot manipulator as compared to the conventional BP algorithm.
Keywords
neural networks ; BP algorithm ; active function ; robot manipulator ; inverse kinematics
Figures

图1
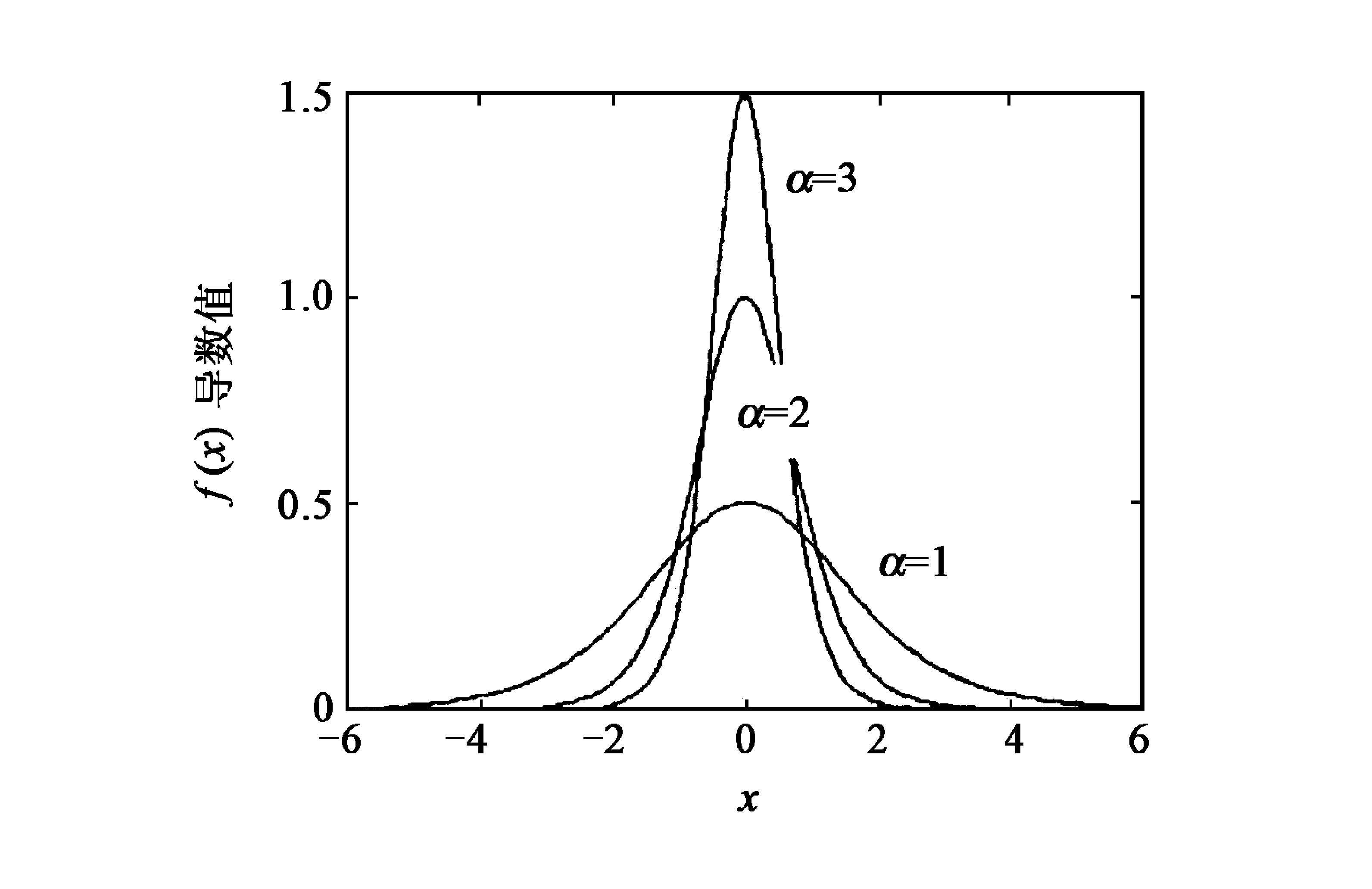
图2
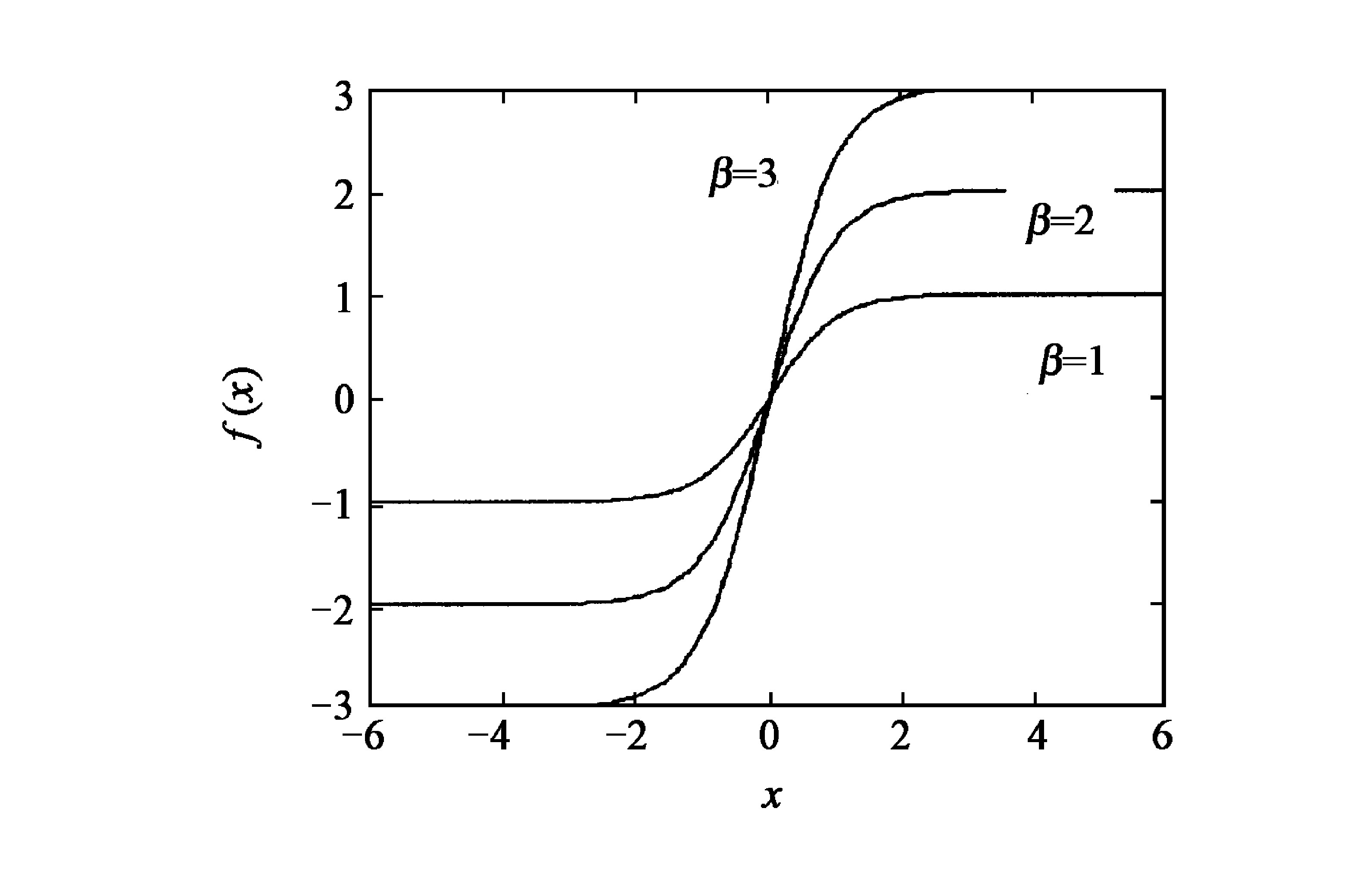
图3

图4
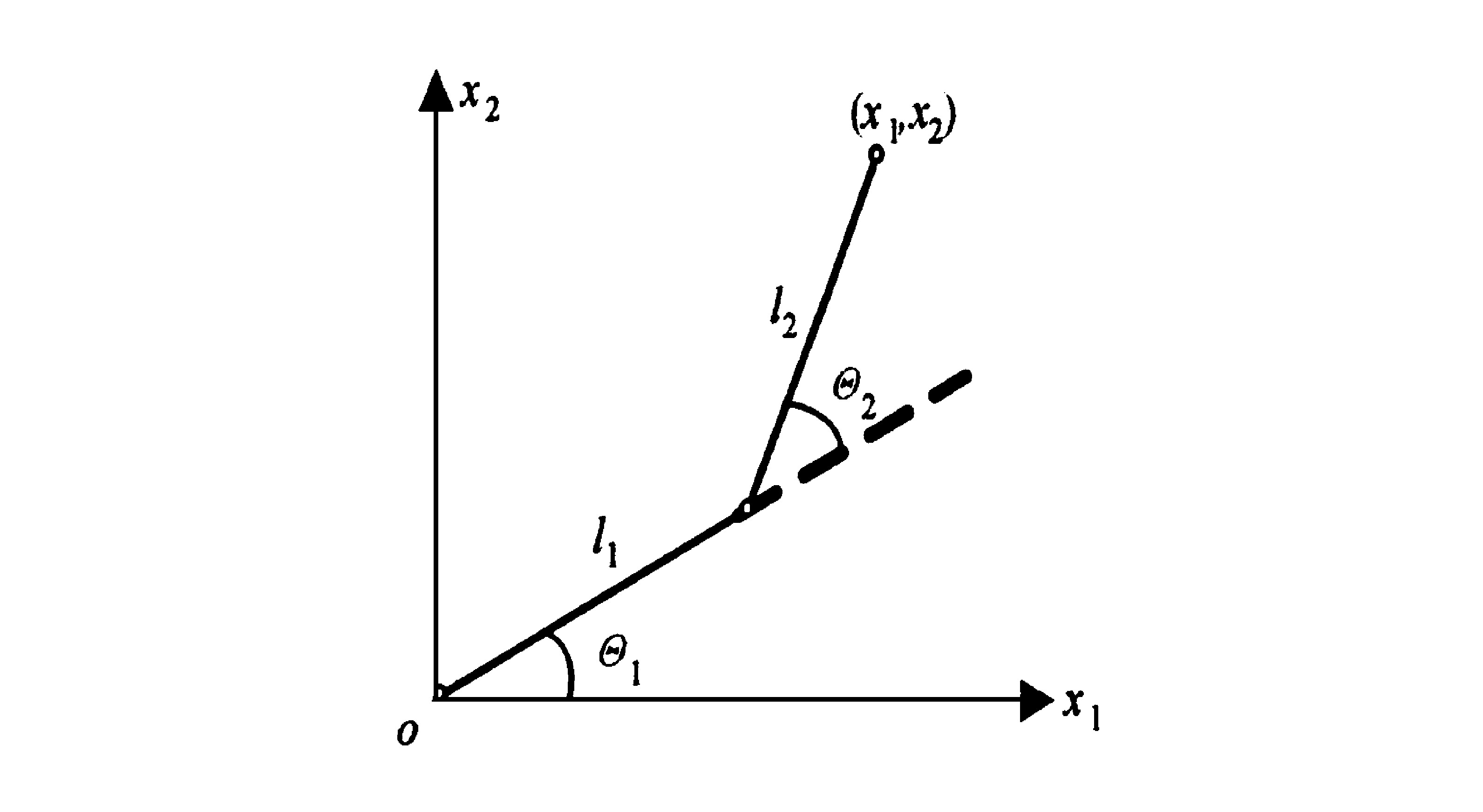
图5

图6

图7
References
[ 1 ] 吕 俊, 张兴华.几种快速BP算法的比较[J].现代电子技术, 2003, (24) :96~99 link1
[ 2 ] 李晓东, 胡志恒, 虞厥邦.一种前馈神经网络的快速学习算法[J].信号处理, 2004, 20 (2) :184~187 link1
[ 3 ] 李祥飞, 邹 恩, 邹莉华.前馈神经网络的混沌BP混合学习算法[J].控制与决策, 2004, 19 (4) :462~464 link1
[ 4 ] 杨国军, 崔平远.一种神经网络方法在机械手控制中的应用[J].电机与控制学报, 2000, 4 (3) :179~187 link1
[ 5 ] 谭 营, 何振亚.一种神经网络参数扰动算法及其在机械手控制中的应用[J].机器人, 1997, 19 (6) :438~443 link1
[ 6 ] 肖俊芳, 王耀青.一种激励函数可调的快速BP算法[J].自动化技术与应用, 2002, 21 (6) :26~29 link1
[ 7 ] KarlikB , AydinS .Animprovedapproachtothesolutionofinversekinematics problemsforrobotmanipulators[J ].EngineeringApplicationsofArtificialIntelligence, 2000, (13) :159~164
[ 8 ] 宋卫荣, 翁桂荣.BP网络激励函数的研究[J].苏州大学学报, 2002, 18 (4) :58~61 link1
[ 9 ] 裴浩东, 苏宏业.多层前向神经网络的权值平衡算法[J].电子学报, 2002, 30 (1) :139~140 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




