2005, Volume 7, Issue 10
Strategic Study of CAE >> 2005, Volume 7, Issue 10
A Control System Based on the Lagrange Modeling Method for a Single Link Rotary Inverted Pendulum
School of Electrical Engineering & Automation , Tianjin University, Tianjin 300072, China
Next Previous
Abstract
In this paper the design and realization of the rotary inverted pendulum (RIP) control system is presented. After analyzing its dynamic characteristics, the system model based on Lagrange method is devised. In addition, linear quadratic regulator (LQR) is designed and implemented on the RIP system by successfully balancing the pendulum in the inverted position. Simulation and experimental results are presented to show the stable and robust responses of the control system.
Keywords
rotary inverted pendulum ; Lagrange method ; LQR control strategy
Figures
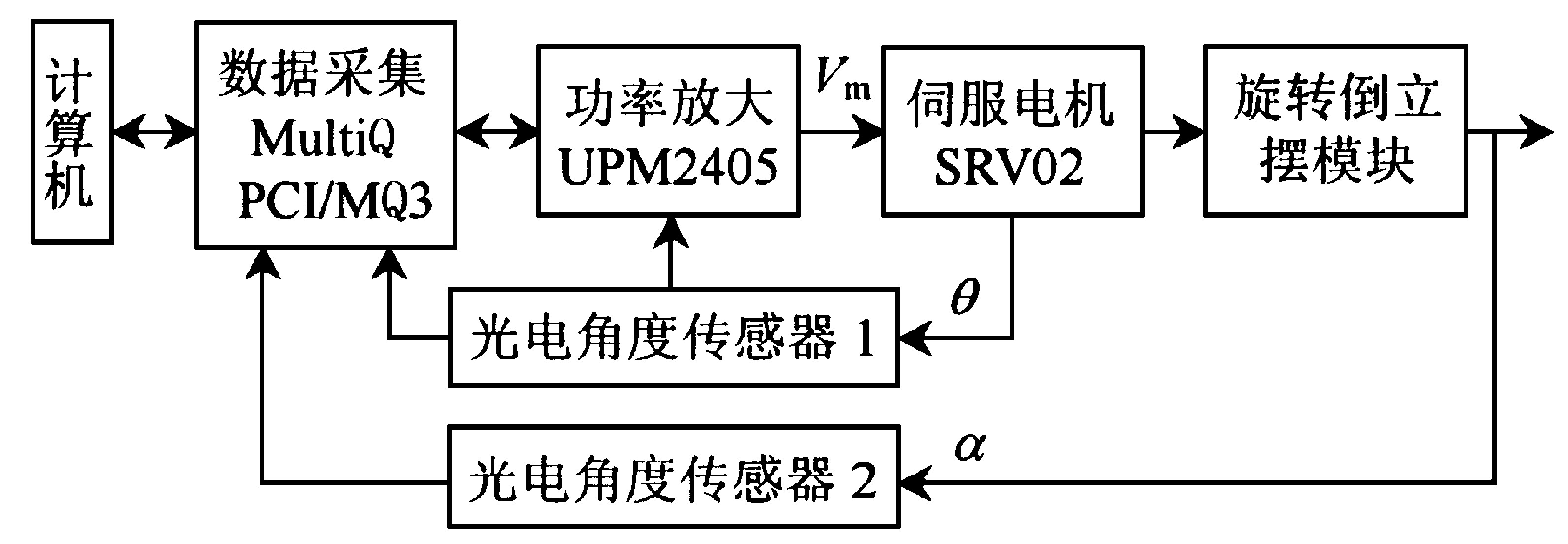
图1
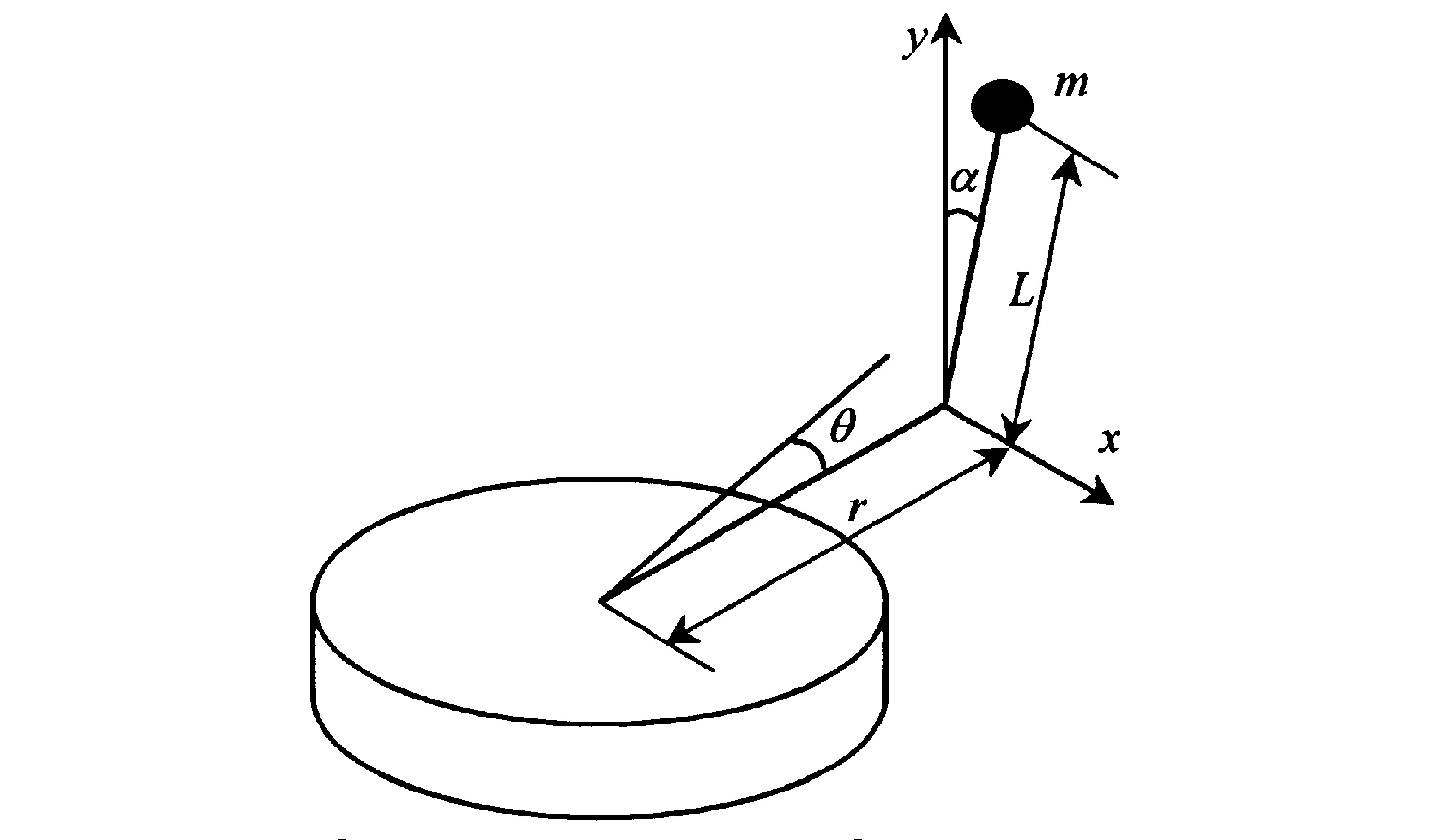
图2
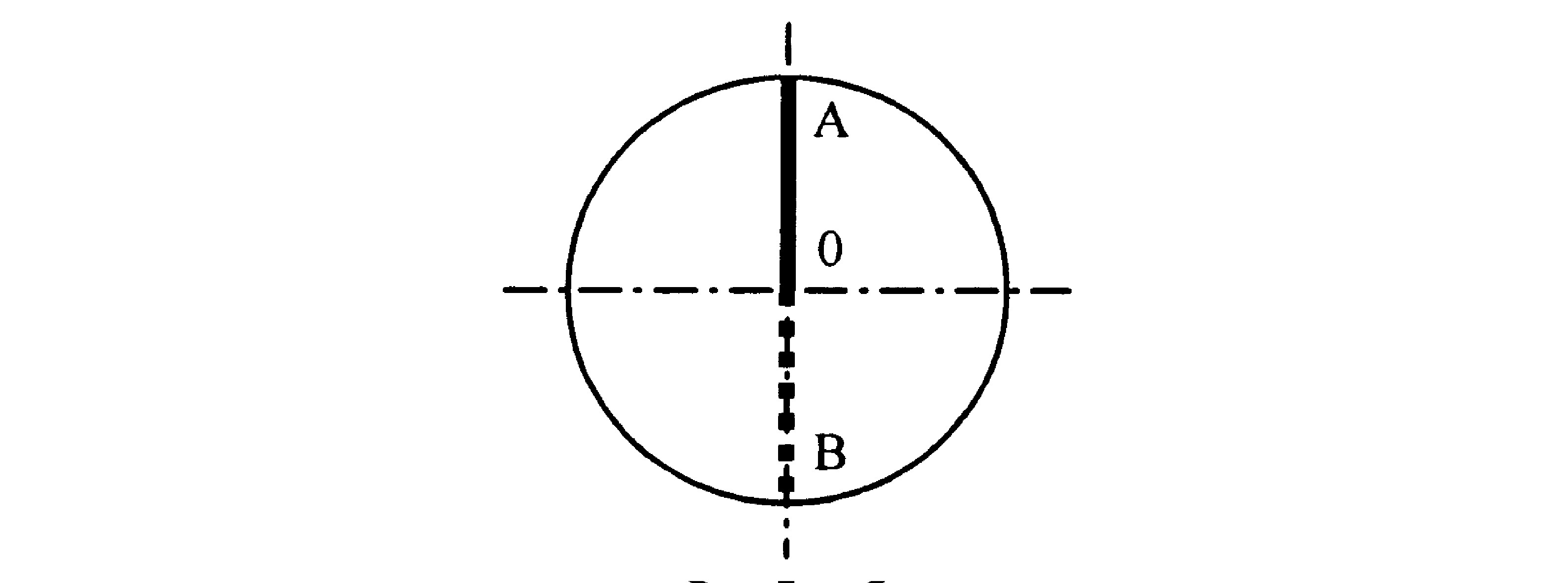
图3
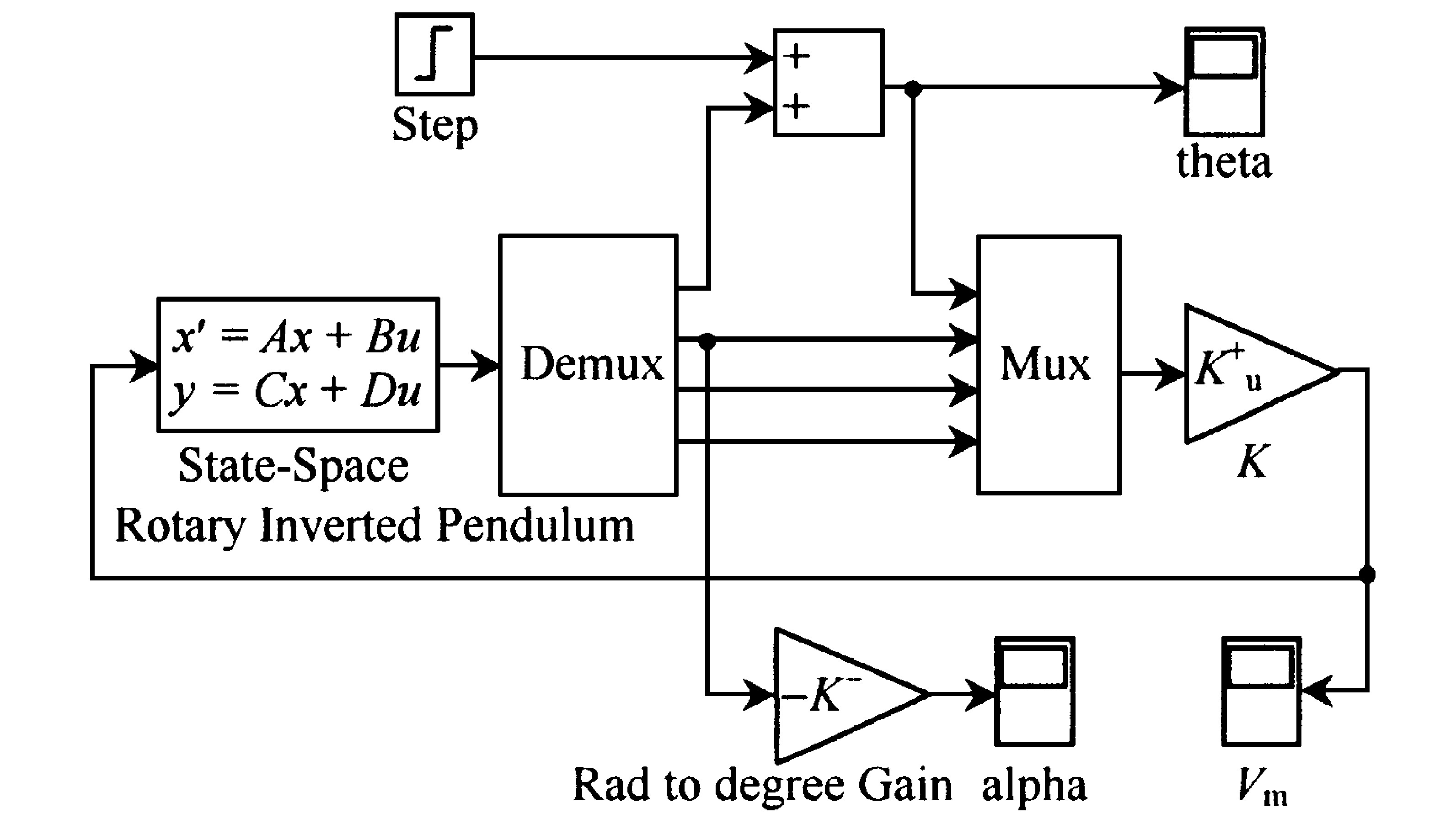
图4

图5

图6
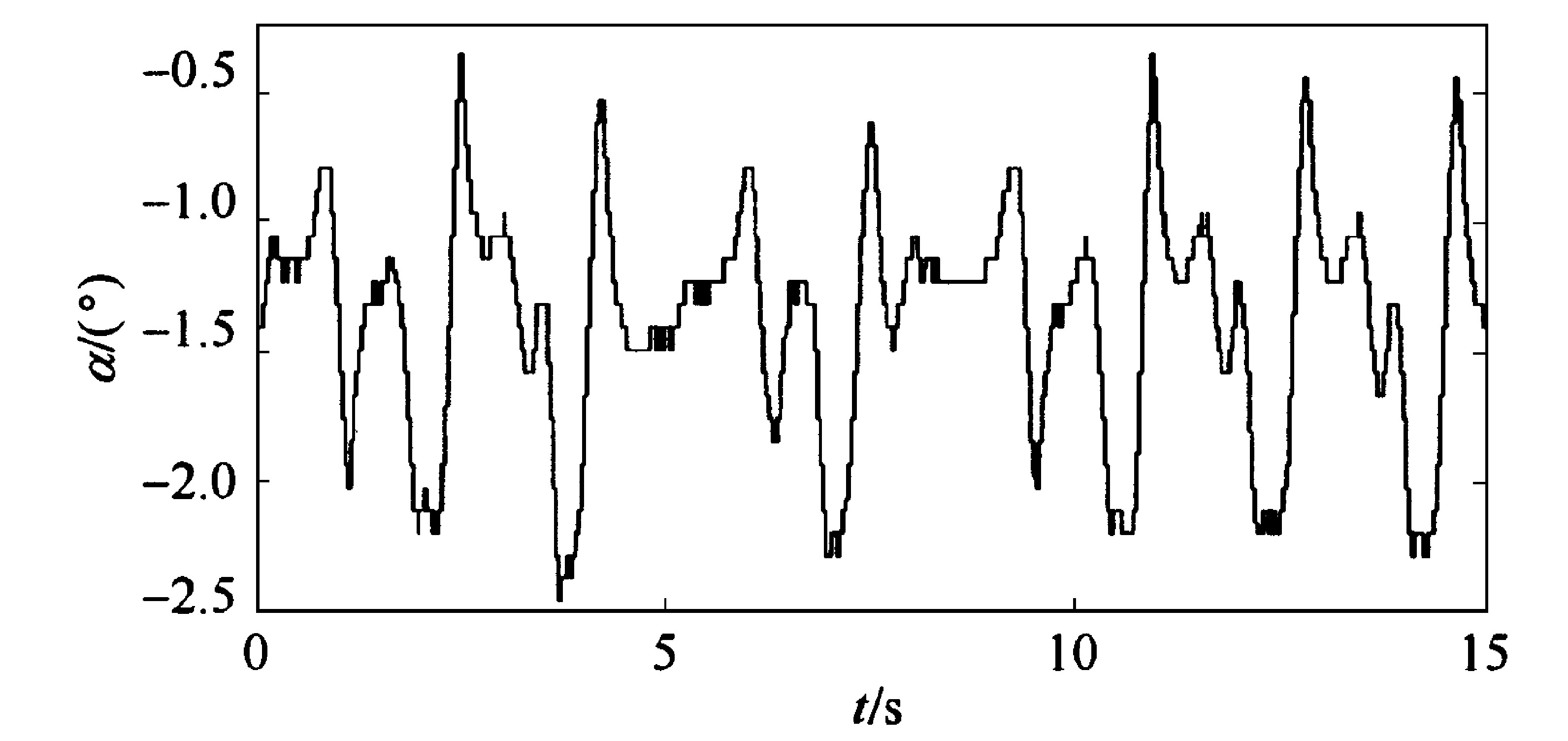
图7
References
[ 1 ] ShiriaevAS, FrieselA, PerramJ, PogromskyA.On stabilizationofrotationalmodesofaninverted pendulum[A].Procofthe39thIEEEConferenceon DecisionandControl[C].NSWAustraliaSydney, 2000, 12 (5) :5047~5052
[ 2 ] MradF, El HassanN, MahmoudSEH, AlawiehB, AdlouniF.Real timecontroloffree standingcart mountedinvertedpendulumusingLabVIEWRT[A].ConferenceRecordofthe2000IEEEIndustry ApplicationsConference[C].ItalyRome, 2000, 10 (2) :1291~1298
[ 3 ] ParkJI, LeeSG.Synthesisofcontrolinputsfor simultaneouscontrolofangleandpositionofinverted pendulum[A].Procof19964thInternational WorkshoponAdvancedMotionControl[C].Japan:Mie, 1996, 3 (2) :619~624
[ 4 ] RotaryInvertedPendulumUserGuides&Laboratories[M].QuanserInc, 2003
[ 5 ] 张培仁, 都改欣, 卿志远, 梁家恩.用DSP及脉宽调制驱动芯片A3952控制倒立摆[J].电子技术, 2002, 1:57 link1
[ 6 ] DuGaixin, HuangNanchen, WuGang.The rotationalinverted pendulumbasedonDSPcontroller[A].Procofthe4thWorldCongressonIntelligent ControlandAutomation[C].ChinaShanghai, 2002, 7 (4) :3101~3105











 京公网安备 11010502051620号
京公网安备 11010502051620号




