2006, Volume 8, Issue 10
Strategic Study of CAE >> 2006, Volume 8, Issue 10
Frequency-domain-based Robustness Analysis for PID Generalized Predictive Control
Department of Automation , Nankai University, Tianjin 300071, China
Next Previous
Abstract
The closed-loop feedback structure of PID generalized predictive control (PID - GPC) is proposed, then small-gain criterion is used to obtain a sufficient condition for the robust stability of PID - GPC under the condition of model-plant mismatch ( MPM) . Further more, the influence of PID - GPC parameter tuning on its robustness is analyzed in frequency domain.
Keywords
predictive control ; robustness ; frequency domain ; small-gain criterion ; PID control
Figures
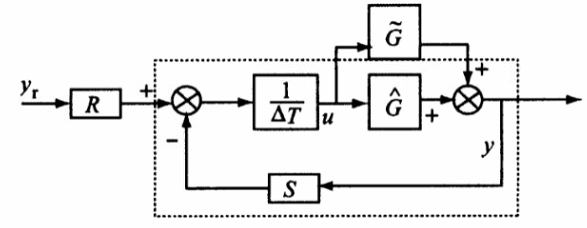
图1 PID-GPC 的反馈结构图
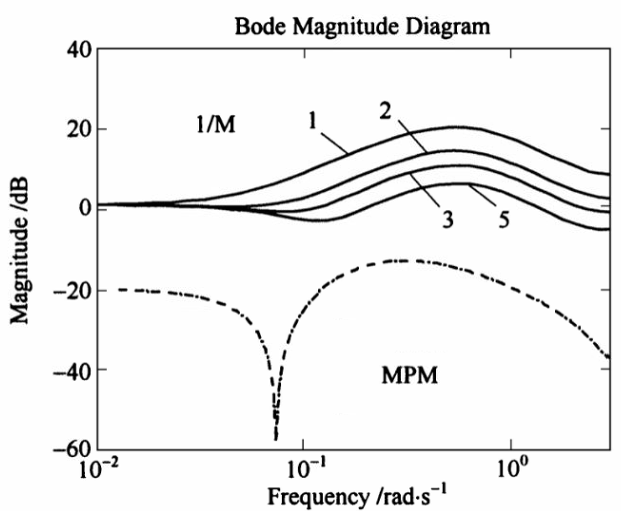
图2Ki对稳定界变化的影响效果

图3Kp对稳定界变化的影响效果

图4Kd对稳定界变化的影响效果











 京公网安备 11010502051620号
京公网安备 11010502051620号




