《1 前言》
1 前言
直接转矩控制中,转矩控制的效果不取决于是否能够得到简化的电机数学模型,而取决于转矩的实际状况[1,2] 。目前,转矩调节多采用 PID 控制,包括诸多性能优越的新型 PID 控制器[3~5] 。 20 世纪 90 年代,我国学者提出的自抗扰控制器(ADRC) [6] 得到了众多学者的重视,成为传统 PID 的强有力竞争者,并在交流调速领域得到初步应用,但主要集中于矢量控制调速系统中[7~12] 。文章在深入分析感应电机直接转矩控制原理上,以模型参考自适应理论为基础,采用 PI 自适应率,设计速度观测器,并以 ADRC 控制器取代 PID 控制器建立无速度传感器直接转矩控制系统,对其各项关键参数进行良好整定。系统保持了直接转矩控制固有优点,且性能得到进一步提升。
《2 直接转矩控制中的速度观测器设计》
2 直接转矩控制中的速度观测器设计
《2.1 感应电机数学模型》
2.1 感应电机数学模型
交流电机在静止坐标系 α - β 下的定转子电压方程为




式中, Rs,Rr 为定、转子电阻;ωr 为转子速度;usα,usβ 为 α, 轴定子电压;urα,urβ 为 α, 轴转子电压;
轴定子电压;urα,urβ 为 α, 轴转子电压; sα,sβ 为定子磁链 α, 轴分量;rα,rβ 为转子磁链 α, 轴分量;D 为微分算子;isα,isβ 为 α, 轴定子电流。转子磁链方程为
sα,sβ 为定子磁链 α, 轴分量;rα,rβ 为转子磁链 α, 轴分量;D 为微分算子;isα,isβ 为 α, 轴定子电流。转子磁链方程为


式中, = 1 -
= 1 - /Lr Ls, Ls,Lr,Lm 分别为定、转子自感及互感。转子磁链方程也可写为
/Lr Ls, Ls,Lr,Lm 分别为定、转子自感及互感。转子磁链方程也可写为


式(5)、式( 6)为转子磁链电压模型,式(7)、式(8)为转子磁链电流模型。电磁转矩方程为

式中,pn 为电机极对数; Te 为电磁转矩。机电运动方程为

式中,J 为转动惯量;B 为粘滞阻尼系数;TL 为负载转矩。
《2.2 速度观测器设计》
2.2 速度观测器设计
电压型逆变器输入端直流电压是已知量,而输入为 6 个电压矢量及两个零矢量,在直接转矩控制系统中,任一时刻所发的电压矢量是知道的,由此电机相(线)电压值可以精确求得,而电机电流值可采用高精度电流传感器检测出来,因而可由式(5)、式(6)构成电机参考模型,合并成式(11)。
若将式(7)、式(8)中  看成需要辨识的量,其他参数认为不变化,则将式(7)、式(8)合并为式(12)作为电机可调模型。
看成需要辨识的量,其他参数认为不变化,则将式(7)、式(8)合并为式(12)作为电机可调模型。
 ( 11 )
( 11 )
 (12)
(12)
定义状态误差为

由 Popov 超稳定性理论,取比例积分自适应率推得速度辨识算法为

以上推导的速度辨识算法对电机参数如定、转子电阻的摄动具有一定的鲁棒性(对 MRAS 系统鲁棒性分析可参考相关文献),为了避免电压模型磁通观测中纯积分器的影响,可在参考模型和可调模型中引入滤波环节。此外,为了进一步提高系统性能,还需要在估计转速的同时辩识电机参数。
《3 速度调节自抗扰控制器设计》
3 速度调节自抗扰控制器设计
《3.1 自抗扰控制(ADRC)算法》
3.1 自抗扰控制(ADRC)算法
在自抗扰控制技术中,“系统分类”是按系统的“时间尺度”来进行的,只需考虑“静态耦合”,不用考虑“动态耦合”。自抗扰控制器主要由安排过渡过程、扩张状态观测器、非线性组合、扰动补偿等 4 个部件组合而成。该方法通过扩张状态观测器观测出系统中状态变量的同时,还观测出了系统中的“扰动”。
以二阶系统为例,若被控对象为

1) 安排过渡过程。
 为设定值
为设定值
 (15)
(15)
式中,T 为采样周期,u(k)为第 k 时刻输入信号,fst 函数由下面式子计算



2) 估计状态和总扰动(ESO)方程。

式中,e ( k ) = z1 ( k ) - y ( k ),且

 (17)
(17)
3) 控制量的形成。其结构框图如图 1 所示。
《图1》
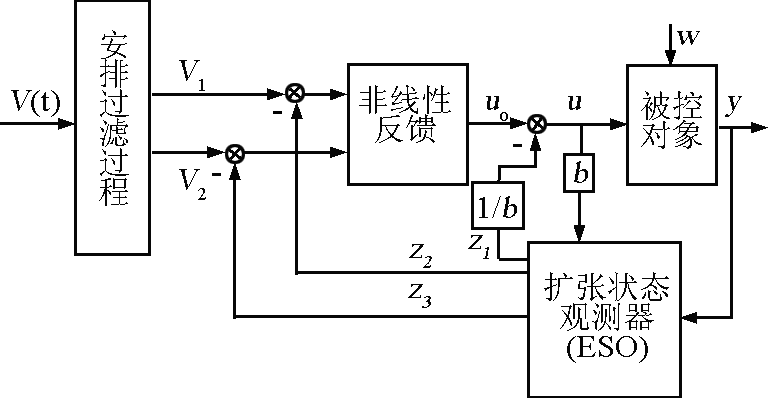
图1 自抗扰控制器结构框图
Fig.1 The block diagram of ADRC
以上述算法为基础,也可方便得到一阶系统和高阶系统的自抗扰算法,推导方法可参考文献[6] 。
《3.2 速度调节器设计》
3.2 速度调节器设计
将机电运动方程式(10)改写为

令扰动函数 f(w)为

以转矩 Te 为控制输入,转子速度 为量测输入,设计成一阶 ADRC 。采用自抗扰控制器的感应电机直接转矩调速系统框图如图 2 所示。图中,定子磁链估算模型采用式(1)、式(2)得到,转矩估算采用式(9)得到,转速估算由式(13)得到。
《图2》

图2 基于自抗扰控制器的直接转矩调速系统
Fig.2 The DTC system based on ADRC
《4 仿真分析》
4 仿真分析
为了充分检验采用自抗扰控制器后直接转矩调速系统的性能,在 SIMULINK 环境下建立了调速系统。选用电机参数为:额定功率 4 kW,额定电压 380 V,额定转速 1 430 r/min,定子电阻 Rs 为 1.405 Ω,转子电阻 Rr 为 1.395 Ω,转动惯量 J 为 0.013 1 kg· m2 。
对在 PID 和 ADRC 分别控制下的转速估计曲线及突加大负载下的响应情况进行对比分析,为了比较的客观性,先将 PID 和 ADRC 参数均整定到最佳状态。 PID 实际取 PI 调节,经过多次参数设计,最终取 kp = 0.09,ki = 0.1 。 ADRC 采用一阶形式,用到的参数有 r,h,T,β2 ,β02 ,β03 ,α2 ,b, 其参数分别选取 0.2,0.09,0.000 5,100,1,0.2,0.9,1,0.01 。电机指令转速为 500 r/min,空载启动,在 1.5 s 时突加负载 10 N· m,图 3(a)和图 4 (a)分别是 PID 和 ADRC 控制下响应曲线。很明显,PID 控制下,施加负载后,电机转速从 500 r/min 下降到 400 r/min 左右,之后经过约 3.5 s 恢复到稳态值。对比分析 ADRC 控制下的情况,施加负载后,电机转速从 500 r/min 下降到 440 r/min 左右,之后经过约 0.4 恢复到稳态值,其对负载响应能力相对 PID 控制提高了约 9 倍。由于自抗扰控制器可以有效估计电机运行状态及其变化趋势,从而通过调节给定转矩对转速的变化趋势预先加以补偿、调节。
其参数分别选取 0.2,0.09,0.000 5,100,1,0.2,0.9,1,0.01 。电机指令转速为 500 r/min,空载启动,在 1.5 s 时突加负载 10 N· m,图 3(a)和图 4 (a)分别是 PID 和 ADRC 控制下响应曲线。很明显,PID 控制下,施加负载后,电机转速从 500 r/min 下降到 400 r/min 左右,之后经过约 3.5 s 恢复到稳态值。对比分析 ADRC 控制下的情况,施加负载后,电机转速从 500 r/min 下降到 440 r/min 左右,之后经过约 0.4 恢复到稳态值,其对负载响应能力相对 PID 控制提高了约 9 倍。由于自抗扰控制器可以有效估计电机运行状态及其变化趋势,从而通过调节给定转矩对转速的变化趋势预先加以补偿、调节。
《图3》
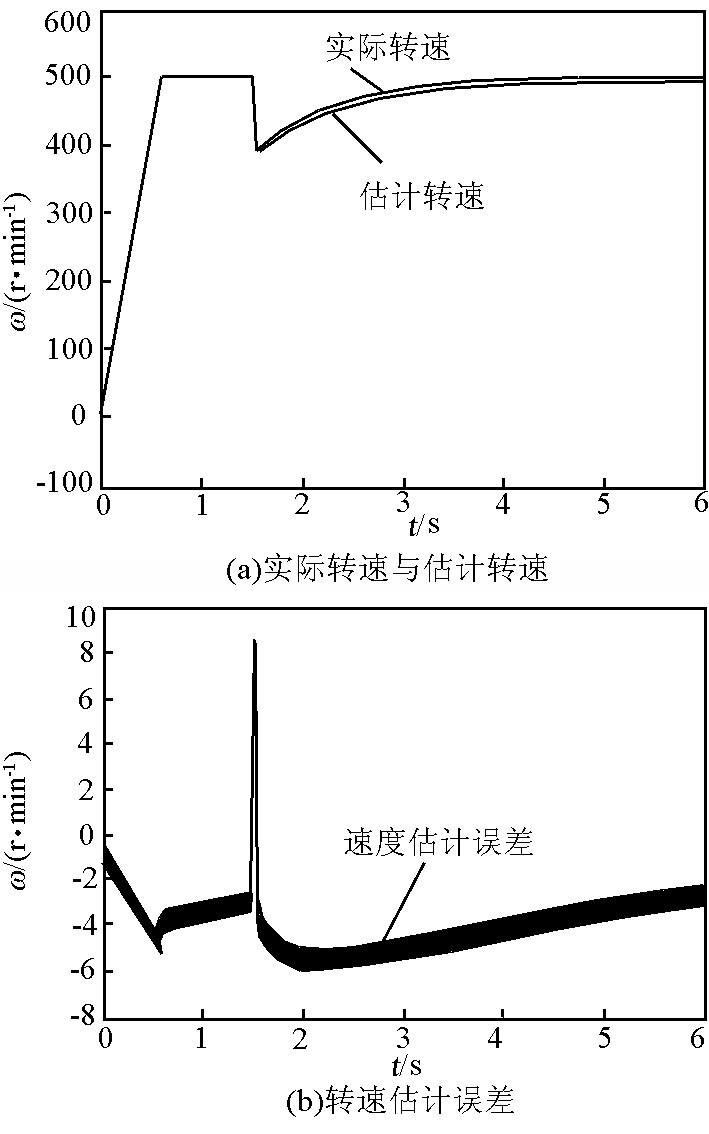
图3 PID 控制下电机速度曲线
Fig.3 Response of motor speed based on PID
《图4》

图4 ADRC 控制下速度曲线波形
Fig.4 Response of speed based on ADRC
事实上,电机在运行过程中,由于温升和集肤效应等因素影响,定、转子电阻和电感等参数都是变化的,尤其是电阻摄动。为了考察系统速度估计性能,以及在此情况下 PID 和 ADRC 控制性能差异,在电机运行至 1 s 时,改变定、转子电阻数值(设其摄动量为 30 %),同时适当改变定、转子电感值。图 5 给出了参数摄动下电机速度波形,其指令转速仍为 500 r/min, 1 s 时改变电机参数, 1.5 s 突加负载 10 N· m 。从图 5 中曲线可以看出,空载情况下,当参数摄动时,无论是 PID 控制还是 ADRC 控制,电机转速经过短暂波动后均能恢复到设定值。在 1.5 s 突加负载以后,由于参数摄动的影响,电机运行到稳态后其转速比设定值要小,但也明显看出,采取 ADRC 控制条件下,其相对指令转速的偏差比 PID 控制下小得多,从而进一步验证了 ADRC 控制的优越性能。图 6 给出了直接转矩 ADRC 控制与矢量 ADRC 控制下的电机性能比较。矢量控制系统基于转子磁链定向,采用电流控制 PWM 逆变器,含有速度调节器,转子磁链计算环节,电流转矩分量、励磁分量计算环节等。考虑自抗扰控制器作为速度调节环节,在与直接转矩 ADRC 控制作性能比较时,选用相同电机,均在 2.5 s 突加负载 10 N· m,3.5 s 时指令转速由 500 r/min 变为 1 000 r/min 。由图 6 可以看出,在上述试验条件下,当电机负载变化时,矢量 ADRC 控制的性能好于直接转矩 ADRC 控制,指令速度变化时,直接转矩 ADRC 控制下电机响应快于矢量 ADRC 控制。需要指出的是,上述性能的差异除受 ADRC 控制器影响外,还受到各自其他控制环节的影响。仿真时也发现,矢量控制中,采用 ADRC 作为速度调节器要比采用 PID 作为速度调节器性能更优越。
《图5》

图5 参数摄动下电机速度曲线
Fig.5 Response of motor speed when motor parameter varied
《图6》
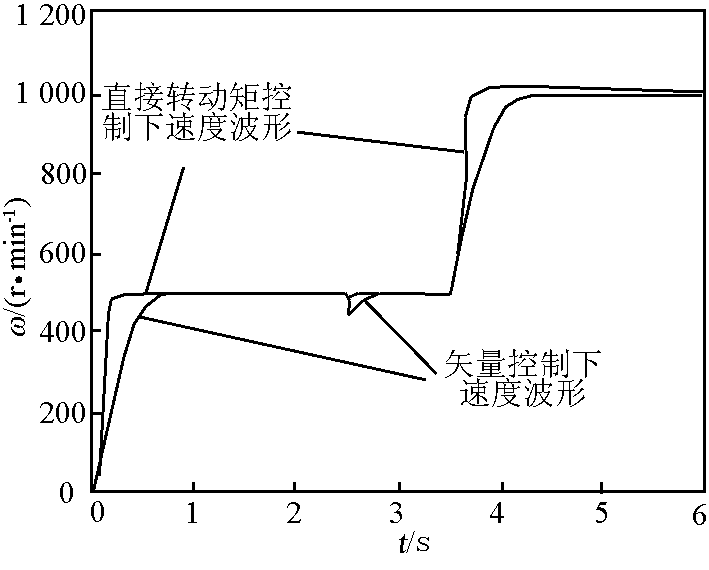
图6 直接转矩 ADRC 控制与矢量 ADRC 控制波形对比
Fig.6 The waveform comparison between DTC ADRC and FOC ADRC
《5 结语》
5 结语
将自抗扰控制原理应用于感应电机直接转矩控制系统中,设计了速度 ADRC 调节器和基于 MRAS 的速度估计器,建立了无速度传感器整体控制系统。仿真分析表明,系统的动态响应快,抗扰动能力强,对参数摄动具有一定的鲁棒性。带载情况下,参数摄动会造成电机运行速度与指令速度的偏差,这一情况可采取参数辨识技术加以解决。相对 PID 控制,ADRC 算法稍显复杂,但采用高速 DSP 后,其性能可得到充分发挥。











 京公网安备 11010502051620号
京公网安备 11010502051620号




