

《1 前言》
1 前言
围绕防护工程抗精确打击毁伤分析领域的实体、实体关系以及毁伤机理,不断完善科学模型来仿真分析和研究防护工程的毁伤特性与规律,是传统理论、实验研究的发展和补充[1] 。动荷段是坑道式防护工程的咽喉部位和抗毁伤薄弱环节,是相当一段时间内防护工程毁伤仿真等科学研究关注的焦点问题[2] 。
利用面向实体的地理认知方法和三维建模体系结构,如何设计合理、完整的动荷段实体模型,如何形象地表达地质构造的形态特征、地质属性以及构造要素的空间关系,如何逼真、动态、系统地表达动荷段实体对象的防护属性、几何形态和位置关系以及对象之间的拓扑关系,有效实现坑道工程动荷段地理、结构、拓扑关系、材料介质、功能等层面的抽象数据集成[3] ,是动荷段视景仿真、载荷分析、毁伤计算、防护仿真研究的前提和基础[4] 。
《2 坑道工程动荷段实体模型构件化设计》
2 坑道工程动荷段实体模型构件化设计
《2.1 坑道工程动荷段实体模型构件化设计解决方案》
2.1 坑道工程动荷段实体模型构件化设计解决方案
以防护工程区域地理认知为基础,综合应用空间数据库技术、专家系统、模型库技术、软件工程交互技术等建立准确、全面、规范的坑道工程动荷段实体信息系统,以期能够有效地集成和管理动荷段实体的相关信息,进而为动荷段抗精确打击毁伤仿真实验提供技术支持。
面向服务动荷段毁伤分析系统的思想,以松散耦合,支持毁伤分析应用系统高效整合和业务流程,便于信息系统设计为目标[5] ,建立坑道工程动荷段实体模型构件化设计技术方案,如图1所示。
《图1》

图1 坑道工程动荷段实体模型构件化设计方案
Fig.1 Component-based entity model design scheme for active load section of protective engineering
介质材料、剖面测点、构件单元、动荷段总体结构数据库,构件化规则库、插值计算模型库、价值指数知识库等构成坑道工程动荷段实体模型信息系统的基础数据源。从内涵角度,设计方案一方面包括剖面测点与动荷段总体结构之间的隶属和被聚合关系,数据模型层面由剖面测点参数与总体结构参数支持而形成坑道工程动荷段实体模型;另一方面,遵循构件化设计规则,利用参数插值计算模型,确定构件单元实体模型,其通过“聚合”关系形成坑道工程动荷段实体模型。
构件化规则及其构件单元设计是方案的典型特征,故称之为构件化设计方案。有效性验证是保证构件单元设计质量的重要环节,以保证坑道工程动荷段实体模型信息系统设计的开放性和应用潜力,即基于测点结构层、构件单元层、动荷段综合体结构层次的3层体系聚合与集成设计模式。
《2.2 构件化设计的动荷段实体模型功能架构》
2.2 构件化设计的动荷段实体模型功能架构
以防护工程抗精确打击毁伤分析使命空间的功能需求为出发点,遵循坑道工程动荷段实体模型构件化设计思想,按照模块化划分和结构设计的高凝聚度和低耦合度原则[6] ,设计构件化的坑道工程动荷段实体模型功能体系架构,如图2所示。
《图2》

图2 基于构件化的坑道工程动荷段实体模型功能体系架构
Fig.2 Functional architecture about component-based entity model for active load section of protective engineering
构件化设计的坑道工程动荷段实体模型功能体系,主要包括总体控制、介质材料参数模型服务、测点参数管理、构件单元参数管理、构件单元相关性分析等模块,通过组件化的信息系统查询、定制和服务引擎,提供全面、规范化、系统化的防护工程实体数据。
其中,构件单元步长是影响构件单元体系规划与设计的重要因素,其数值太小,则致使构件单元数量偏大,使得构件单元相关性的分析计算量呈指数倍增加;反之,则致使构件单元单体几何结构庞大,难以通过构件单元的相关性反映构件单元之间的物理关联及其价值拓扑等映射关系。
《2.3 坑道工程动荷段实体模型设计》
2.3 坑道工程动荷段实体模型设计
针对防护工程实际及通用软件设计原理,构件化设计坑道工程动荷段实体模型,形成独立于防护工程抗精确打击毁伤分析的独立应用程序,一方面对动荷段的空间及属性数据进行一体化管理,另一方面对坑道工程动荷段实体模型进行空间分析及工程计算,即数据获取、模型管理、实体服务等。
模型的软件设计遵循易于操作原则,采用关系型数据库规范化理论建立坑道工程动荷段实体模型数据库基础[7] ,集软件工程、管理信息系统(MIS)、数据仓库、决策分析和地理信息系统(GIS)于一体,构建面向数据服务的动荷段实体的一体化体系结构模型,其系统主界面如图3所示。
《图3》

图3 坑道工程动荷段实体模型
Fig.3 Active load section entity model of protective engineering
坑道工程动荷段实体模型,其菜单、工具栏、数据面板等清晰明确,既融合介质材料参数模型,实现防护介质材料参数的数据管理;同时,集成动荷段实体的剖面测点参数、构件单元参数、构件单元价值参数、整体结构参数的数据管理[8] 。其中,“构件单元步长”实现坑道工程动荷段实体模型的不同构件化设计,即同一坑道工程动荷段实体模型因构件单元步长的不同,而产生迥然不同的构件单元集合。
《3 动荷段实体模型设计质量判决模型》
3 动荷段实体模型设计质量判决模型
《3.1 坑道工程动荷段实体模型设计质量模糊性描述》
3.1 坑道工程动荷段实体模型设计质量模糊性描述
坑道式防护工程客观环境内各种物理参数无序的变化特征,致使坑道工程动荷段实体模型设计质量判决的部分信息无法精确化定量描述,部分属性指标难以确定显式的隶属函数,主要依靠主观测度对不确定信息进行模糊性转化和判决,存在风险极大的模糊偏好现象,影响坑道工程动荷段实体模型设计质量判决的科学性[9] 。
因此,迫切需要根据坑道工程动荷段实体模型构件化设计特点,集成度量多属性的隶属度和非隶属度信息,考虑属性指标的可能性、不可能性和未知可能性,细致描述属性指标的模糊性本质,为坑道工程动荷段实体模型设计质量提供科学的判决依据。
直觉模糊集是对Lotfi A. Zadeh模糊集的一种扩充和发展[10] ,可同时考虑隶属度和非隶属度方面的信息[11] ,为多属性模糊决策问题提供了很好的工具[12] 。
Atanassov 给出直觉模糊集的基本定义[10] :设 Z 是一个给定的非空经典集合,Z ={z1 ,z2,⋯,zm } ,则 Z 上的一个直觉模糊集 G 为如下三重组

式(1)中,α : Z →[0,1] 为论域 Z 中元,z 属于 G 的隶属度,表示为支持元素 z 属于集合 G 的证据导出的肯定隶属度的下界;βG : Z →[0,1] 为论域中元素 z 属于 G 的非隶属度,表示为反对元素 z 属于集合 G 的证据导出的否定隶属度的下界。
对于 Z 中的每一个直觉模糊集,称  为直觉模糊集 G 中元素 z 的直觉模糊指数,表示元素 z 属于 G 的犹豫度。显然,
为直觉模糊集 G 中元素 z 的直觉模糊指数,表示元素 z 属于 G 的犹豫度。显然, ,z ∈ Z [13] 。
,z ∈ Z [13] 。
根据直觉模糊集的基本概念,以 D 表示影响坑道工程动荷段实体模型构件化设计质量的属性指标集合,D ={d1 ,d2,⋯,dn } ,主要包括构件单元搜索质量(d1)、支持毁伤分析的满意度(d2)、构件单元体系复杂性(d3)、构件单元可移植性(d4)、数据支持冗余性(d5)、实体模型脆性(d6)、实体模型多序参量的有序性(d7)、构件单元结构映射能力(d8)。
设 αij 和 βij 分别是坑道工程动荷段实体模型设计事件 zi ∈ Z 相对于属性指标 dj ∈ D 关于模糊概念 “ 满意 ”的隶属度和非隶属度,直觉指数 γij = 1 - αij - βij 表示决策的犹豫程度。
在信息不完全确定的模糊环境下,坑道工程动荷段实体模型设计事件 zi ∈ Z 的第 j 个指标的评价值可用直觉模糊值 zij 表示,准确描述坑道工程动荷段实体模型设计事件集合在属性指标集合 D 的模糊信息。
式(2)中, zij =(αij ,γij ) ;h (Z/D ) 为动荷段实体模型设计质量事件判决的直觉模糊矩阵。 zij 将坑道工程动荷段实体模型设计质量判决问题表达为决策的区间估计,即 γij =[αij ,αij + γij ]=[αij ,1 - βij ] 。
因此,坑道工程动荷段实体模型设计质量,即通过对事件集合 Z 在属性集合 D 的直觉模糊度量,根据直觉模糊集表示的满足属性指标程度的优劣判决。
《3.2 正、负理想坑道工程动荷段实体模型设计事件》
3.2 正、负理想坑道工程动荷段实体模型设计事件
设直觉模糊的坑道工程动荷段实体模型设计正理想事件 Z + 和负理想事件 Z - , ,
, 。其中,
。其中, ,
, 。
。
对于直觉模糊的坑道工程动荷段实体模型构件化设计正理想事件 Z +

对于直觉模糊的坑道工程动荷段实体模型构件化设计负理想事件 Z -
直觉模糊的坑道工程动荷段实体模型构件化设计正、负理想事件的数值确定过程表明, 都是直觉模糊值 [14] ,其中
都是直觉模糊值 [14] ,其中  ,
, 。
。
《3.3 动荷段实体模型设计事件的直觉模糊集距离》
3.3 动荷段实体模型设计事件的直觉模糊集距离
令 FS (Z ) 表示坑道工程动荷段实体模型构件化设计事件论域 Z 上所有直觉模糊集构成的集合, A ∈ FS (Z ) ,B ∈ FS (Z ) ,给出映射关系 S

则称 S (A,B ) 为直觉模糊集 A 和 B 的相似度,即动荷段实体模型构件化设计事件之间的直觉模糊距离,满足 0  S (A,B ) 1 ,S (A,B )= S (B,A ) ;如果 A = B ,则 S (A,B )= 0;如果 A
S (A,B ) 1 ,S (A,B )= S (B,A ) ;如果 A = B ,则 S (A,B )= 0;如果 A B E ∈ FS (Z ),则S (A,E )
B E ∈ FS (Z ),则S (A,E )  S (A,B ),且 S (A,E ) S (B,E ) 。
S (A,B ),且 S (A,E ) S (B,E ) 。
设 、
、 、
、 分别表示动荷段实体模型构件化设计直觉模糊集 A 和 B 之间隶属度、非隶属度、犹豫度的距离计算,确定 A 和 B 的相似度,如式(6)
分别表示动荷段实体模型构件化设计直觉模糊集 A 和 B 之间隶属度、非隶属度、犹豫度的距离计算,确定 A 和 B 的相似度,如式(6)

式(6)中,以 简化 A 和 B 之间隶属度
简化 A 和 B 之间隶属度 、非隶属度
、非隶属度 、犹豫度
、犹豫度 的数学表达;
的数学表达; 为动荷段实体模型构件化设计质量判决属性指标
为动荷段实体模型构件化设计质量判决属性指标 的权值。
的权值。
《3.4 动荷段实体模型设计事件影响因素权值计算》
3.4 动荷段实体模型设计事件影响因素权值计算
属性指标的权重确定方法很多,如特尔斐法、层次分析法、环比法和区间估计法等。为消除人为因素在主观测度方面的影响,利用属性指标排队的方法确定动荷段实体模型设计事件质量指标的权值[15] ,如式(7)
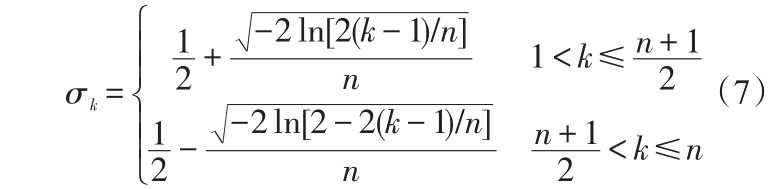
式(7)中, σ1 =1 ; n 为属性指标数目; k 为属性指标的排队等级;再将 σk 归一化处理,即可得到设计质量属性 dj 的权值 θj 。
《3.5 坑道工程动荷段实体模型设计事件优势度计算》
3.5 坑道工程动荷段实体模型设计事件优势度计算
根据动荷段实体模型设计事件的直觉模糊集距离计算公式,计算动荷段实体模型设计事件 zi 到直觉模糊正理想事件 Z + 和负理想事件 Z - 的加权距离
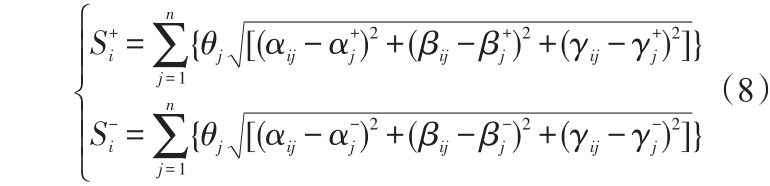
式(8)中, 直觉模糊集 zi ∈Z 和正、负理想实体模型构件化设计事件 Z +和Z -的距离,即相似度
直觉模糊集 zi ∈Z 和正、负理想实体模型构件化设计事件 Z +和Z -的距离,即相似度
设 ω 表示坑道工程动荷段实体模型构件化设计事件 zi 到直觉模糊正理想事件 Z + 的加权距离的变异系数,0 ≤ ω ≤ 1.0 ;以  表示坑道工程动荷段实体模型构件化设计事件 zi 的直觉模糊优势度的综合计算值,即
表示坑道工程动荷段实体模型构件化设计事件 zi 的直觉模糊优势度的综合计算值,即

《4 动荷段实体模型设计质量判决算例分析》
4 动荷段实体模型设计质量判决算例分析
以某典型防护工程为例,通过决策群体的主观测度及量化计算,确定坑道工程动荷段实体模型构件化设计案例的直觉模糊参数以及属性指标的权值,如表 1所示。其中,z1、z2 、z3 、z4 、z5 、z6 分别表示构件单元步长数值为3 m、5 m、7 m、9 m、11 m、13 m的坑道工程动荷段实体模型构件化设计方案或事件。
根据式(3)、式(4),确定坑道工程动荷段实体模型构件化设计的正、负理想事件Z + 和 Z - ,其参数如表2所示。
《表1》
表1 坑道工程动荷段实体模型构件化设计事件的直觉模糊参数估计及指标权值
Table 1 Intuitionistic fuzzy parameters and index weights in component-based entity model design event for the active load section of protective engineering

《表2》
表2 直觉模糊正、负理想坑道工程动荷段实体模型构件化设计事件参数
Table 2 Intuitionistic fuzzy positive and negative ideal component-based entity model design event parameters for the active load section of protective engineering

根据式(8),确定坑道工程动荷段实体模型构件化设计事件zi 到直觉模糊正理想事件 Z + 和负理想事件Z - 的距离 ,如表3所示。
《表3》
表3 坑道工程动荷段实体模型化设计事件距离值
Table 3 Distance value among the entity model design event for the active load section of protective engineering

取变异系数 ω = 0、0.2、0.5、0.8、1.0,按照式(9),计算坑道工程动荷段实体模型构件化设计事件 zi 的直觉模糊优势度 ,如表4所示。
《表4》
表4 实体模型构件化设计事件的直觉模糊优势度
Table 4 Intuitionistic fuzzy superiority of component-based entity model design event

根据表4中坑道工程动荷段实体模型构件化设计事件的直觉模糊优势度,确定坑道工程动荷段实体模型构件化设计事件的优劣关系,如表5所示。
《表5》
表5 实体模型构件化设计事件直觉模糊序列
Table 5 Intuitionistic fuzzy sequence about componentbased entity model design events
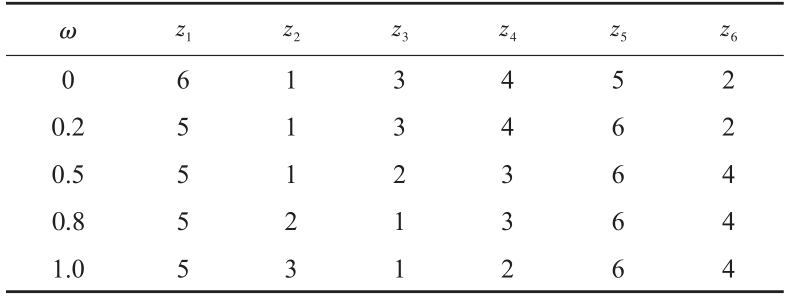
显然,变异系数 ω 明确表达出坑道工程动荷段实体模型构件化设计的复杂性,如 ω = 0.2 和 ω = 0.8 状态下的构件化设计方案差异显著:ω = 0.2 时,构件单元步长为5的设计方案优势度为0.913 7,为设计方案集合中最满意的设计事件;同时,当 ω = 0.8 时,构件单元步长为7的设计方案优势度为0.826 9,为设计方案集合中最满意的设计事件。
《5 结语》
5 结语
1)给出构件化的坑道工程动荷段实体模型设计方案,提出基于软件工程的实体模型功能设计并予以原型化研制,有效集成表达了坑道工程动荷段实体信息及数据描述。
2)通过定义直觉模糊距离的映射关系,给出了直觉模糊集的隶属度、非隶属度和犹豫度的距离,描述了动荷段实体模型构件化设计质量判决属性指标的支持、反对、中立之间的模糊性本质,有效量化了直觉模糊的设计事件的相似度。
3)以逼近直觉模糊的正、负理想事件距离为基础,确定了动荷段实体模型构件化设计事件的直觉模糊优势度计算模型,据此得出实体模型构件化设计事件的优劣关系。
4)算例表明,模型有效、可行,为解决残缺信息状态下的工程实体模型设计质量判决提供了支撑。但是实体模型设计事件的距离计算公式和变异系数,还需要结合具体问题予以确定和改进,以适应实体模型设计体系内在结构的复杂性要求。











 京公网安备 11010502051620号
京公网安备 11010502051620号




