


当进行机械运动方案设计时, 首要的问题是按机械功能要求对执行机构进行选型和构型。若机械的功能要求比较简单, 并且执行构件只有1个时, 可直接选择机构类型。例如, 四连杆机构、三构件凸轮机构、齿轮机构等。但若机械功能要求比较复杂, 或执行构件不止1个时, 单纯靠选型就不一定能满足其功能, 这就需要设计者按功能要求进行构型设计。一般构型设计常采用简单机构的组合法。常用有串联组合、并联组合及复合式组合等等。作者在文中讨论平面图形构造法。
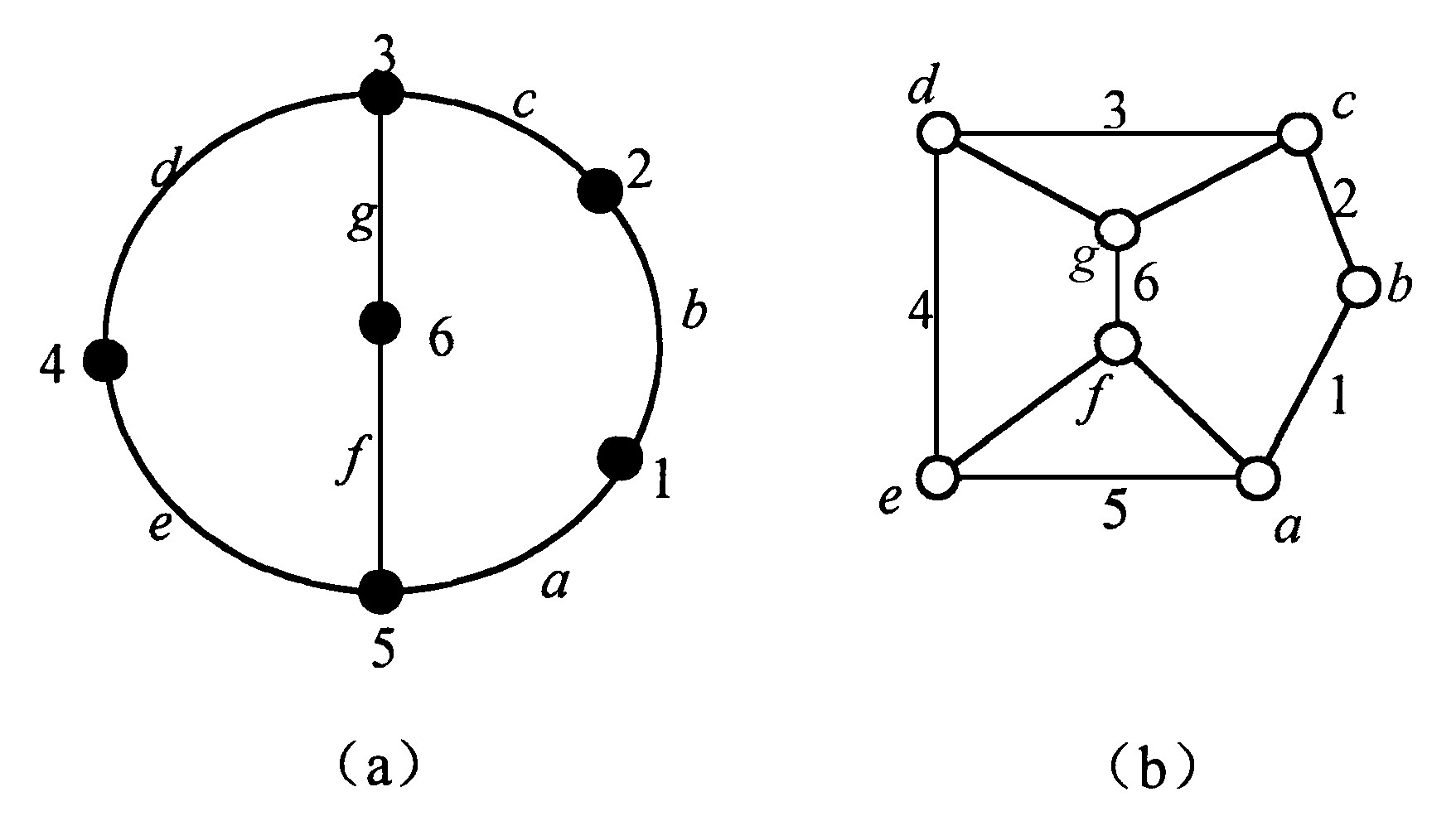
所谓“图”是指由一系列顶点和边组成的相互连通的网络, 见图1, 其点1、2、3、……是图中两边的联结顶点, 其边a、b、c、……是指两点之连线。而平面图则是指图中各边均在顶点处相交, 其他处不相交。从图中可以看出一系列边的集合形成了两个封闭的环路, 被称为图中的简单回路。根据欧拉 (Euler) 定理可知简单回路的个数L是由图中的顶点数N和边数P确定的, 即
而图与运动链的关系则是:顶点代表运动链中的杆, 边代表运动链中的运动副 (简称副) , 简单回路代表运动链中的子链。若将图1 (a) 中的平面图转换为运动链, 则如图1 (b) 所示。平面图中的3点和5点均为3条线的顶点, 被称之为三度点, 它门相当于运动链中的三副杆3和5。而其余顶点均为二度点, 相当于运动链中的二副杆。图中有两个回路, 分别相当于运动链中的两个子链。
平面图形构造法的思路是:首先根据机器功能要求确定执行机构运动链的组成条件, 再按运动链组成条件构造平面图, 最后在平面图上进行机构构型、变异, 并将其中结构最优者转换为机构简图。
《1 运动链的组成条件》
1 运动链的组成条件
运动链的组成条件是按照机械功能要求确定的, 它包括:运动链的杆数N, 副数P, 子链数L, 杆型及其组合方式。
《1.1 运动链杆数N》
1.1 运动链杆数N
杆数的确定主要取决于执行构件, 即输出杆的个数与它们的运动形式。随着输出杆的个数增加和运动形式的复杂化, 运动链中的杆数也增加。它们之间的关系可用1个式子表达, 即
式中N为运动链中的杆数, 1是单自由度输入杆, U为输出杆的个数。
例如U=2, 则运动链的杆数N应大于或至少等于6。
《1.2 确定运动副数P》
1.2 确定运动副数P
根据平面运动链自由度计算公式
即可求出运动副数
例如N=8, F=1, 用式 (3) 计算结果为
《1.3 确定子链数L》
1.3 确定子链数L
根据公式 (1) 可求得。例如N=8, P=10, 则L=P-N+1=10-8+1=3。
《1.4 确定杆型及其组合方式》
1.4 确定杆型及其组合方式
所谓杆型是用杆中所含副数而定义的, 杆中含有2个副就定义为二副杆, 杆中含有3个副就定义为三副杆, 以此类推, 并用符号n2、n3、n4…… 分别表示之。
杆型组合方式是指运动链中具有几种杆型, 以及各种杆型的个数, 对于多杆运动链, 杆型组合方式不止一种, 其组合原则需满足下列关系式, 即
组合时先用式 (4) 确定运动链中多副杆的组合方案, 并且注意nmax=L+1, 例如L=3, 则运动链中含副最多的杆型为四副杆。再用式 (5) 确定每种方案中二副杆的个数。以八杆十副运动链为例, 共有3种组合方案, 如表1所示:
Table 1 The combination project of the eight links' and ten kinematic pair's kinematic chain
《表1》
组合方案 |
n2 | n3 | n4 |
1 |
4 | 4 | 0 |
2 |
5 | 2 | 1 |
3 |
6 | 0 | 2 |
《2 平面图的构造》
2 平面图的构造
《2.1 构造基础图》
2.1 构造基础图
在运动链中, 一般多副杆是少数, 二副杆是多数。即图中多度点是少数的, 而且它们均为回路与回路之间的隔离点。因此, 当根据运动链的组成条件构造平面图时, 最简单的方法是先构造仅由多度点及其连线构成的图, 可称之为基础图, 然后再根据机构的特定要求确定二度点的位置。
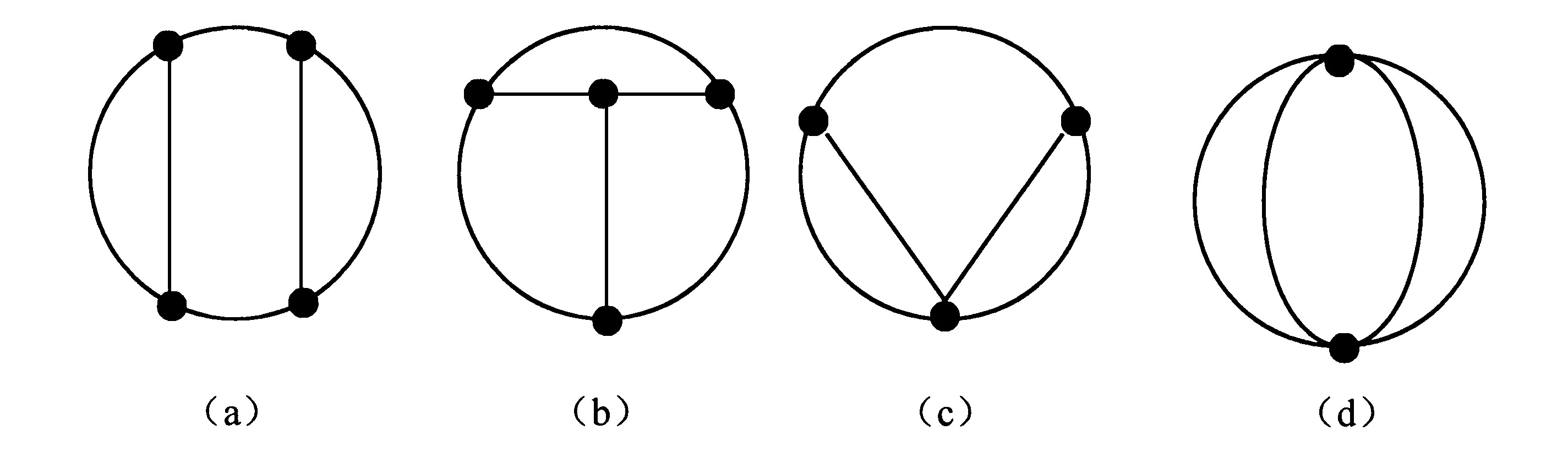
下面以八杆运动链为例, 按照表1中杆型组合方案构造基础图如图2所示:
其中图2 (a) 、 (b) 是方案1, 图2 (c) 是方案2, 图2 (d) 为方案3。
《2.2 构造平面图》
2.2 构造平面图
在基础图上继续确定二度点的位置, 完成平面图的构造。根据机构的特定要求, 即各构件之间应具有确定的相对运动, 因此在确定二度点位置时首先应使每个环所包含总的点数大于等于4, 否则所构造的子链会成为桁架。其次要注意基础图的特性, 包括边的个数及特性, 回路的个数及特性。以图2 (c) 为例, 该基础图有5个边, 其中4个边结构相同, 即为1个四度点和1个三度点的连线, 而第5个边与它们不同, 它是2个三度点的连线。另外该基础图有3个回路, 其中2个回路结构完全相同, 即每个回路中有2个点;而第3个回路与它们不同, 它具有3个点。要在这样一个基础图上继续安排5个二度点, 可按环杆矩阵构造出最终的平面图
《图3》

Fig.3 The second project of the planar graph of the eight links'kinematic chain
《3 机构的构型》
3 机构的构型
在平面图上进行机构的构型首先要确定一些点的位置, 它们是:机架点用FR表示, 输入点用I表示, 输出点用U表示。其次要确定点与点之间路径, 路径说明了运动传递的路线, 用箭头表示。最后根据机械的功能确定图中各边的含义:符号R表示转动副;P表示移动副等等。这样平面图就变成了有向图, 何种路径最好也是构型的关键。点、边、路径的确定一般可遵循下面几点原则:
1) FR应为多度点。因为输入和输出杆一般都是连架杆, 若1个输入, 2个输出, 则机架至少为三副杆;
2) 若输入和输出均为连架杆, 则I点和U点应与FR点相邻;
3) 为使运动链尽量短, 又不能出现无法运动的桁架, 则I点和其中一个U点一般相隔1个点;
4) 路径最好要经过所有点, 若剩1个点, 则生成的机构为Ⅲ级机构。这对于机构的尺度综合与运动、动力分析增加一定的难度。若剩2个点, 则生成的机构将退化1级, 例如八杆运动链将退化成六杆运动链。
5) 另外构图时还要注意同类点的问题, 以免产生同构的机构。
下面通过1个例子来说明机构的构型过程。某机械包装装置要求2个输出构件相对同一导路输出反向的移动, 工作时相对移动, 工作结束后相离移动;输入构件只有1个, 且输入运动为定轴转动。按该功能要求, 即F=1, U=2, 可首先确定运动链的组成条件, 即按 (2) 、 (3) 、 (1) 式可确定N=6、P=7、L=2, 或N=8、P=10、L=3。若采用后者, 则根据表1可确定其杆型组合方案。当运动链组成条件确定后, 开始构图, 由基础图到平面图, 正如图2和图3所示 (图3只是平面图的一部分) , 最后在图上进行机构的构型。为节约篇幅, 只在图3的基础上按照构图原则进行分析讨论。若完全遵循前面所述的5条, 则只有图3 (b) 和 (c) 满足所有的条件, 它们的有向图如图4 (a) (b) 所示, 它们的机构简图如图5所示。其中图5 (b) 已用于包装机折叠板机构, 并且当机构处于极限位置时, 正好是折叠工位。
《4 结论》
4 结论
利用平面图进行机构的构型简单可靠, 不容易丢掉可选机构类型, 并且可以用矩阵表示, 而矩阵可用计算机进行运算, 这对于开发计算机辅助机构类型创新设计及其专家系统是很有效的途径之一。











 京公网安备 11010502051620号
京公网安备 11010502051620号




