《1 引言》
1 引言
近年来,随着无线通信技术,尤其是第三代移动通信技术的飞速发展,全球移动通信系统的商用进程在不断加快。基站控制器作为移动通信网的核心成员,一方面要负责终端的接入,另一方面还要和上一级或本层设备进行通信;这种将两个相似的网络设备连接起来的装置就称为互连设备。在 3G 通信系统中,一般采用光纤作为基站互联设备,但是在那些不易布置光纤(例如山区)的地方,就只能求助于无线通信技术了。考虑到频谱利用率以及实现的代价,可以选用高阶 QAM 调制来实现高速的数据通信。
另一方面,在数字通信中传输信息由于多径衰落信道影响,在接收机接收之前会受到码间干扰(ISI)的影响,信道均衡技术可以有效地降低码间干扰,提高系统性能。对于多径信道的均衡,一般有两种实现方法:一种是利用训练序列,比较适用于突发式的业务,这种方法容易实现,但是浪费系统时间;另一种是 DVB 系统中广泛使用的盲均衡技术,它不需要前导序列,直接利用接收的数据进行信道均衡,这种估计算法能有效节省系统时间和频率资源,提高系统容量。
对 3G 互连应用来说,基于数据流的特点使得盲均衡技术成为了首选,其中又以 CMA 算法应用得最为广泛;但是 CMA 本身存在的伪收敛问题给均衡器带来了不稳定的因素。笔者从迭代方程、代价函数和初始系数三方面对这个问题进行了分析,并给出了改进的 TDE - CMA 算法。这种算法根据初始系数的选择对收敛结果的影响,在原有的算法上增加了一个主径时延修正因子,通过迭代修正主径的位置来获得正确的收敛结果。
《2 CMA 的收敛性》
2 CMA 的收敛性
Godard 提出的 CMA2.2[1] 是在实际应用中使用的较为广泛的一种盲均衡算法。它的代价函数为

其中  代表接收到的符号,
代表接收到的符号, 代表发送的符号。均衡器的系数更新方程为
代表发送的符号。均衡器的系数更新方程为


其中  为阶长为 N 的接收机输入矢量,μ 为迭代步长,
为阶长为 N 的接收机输入矢量,μ 为迭代步长,  代表第 i 次迭代后滤波器的系数矢量,
代表第 i 次迭代后滤波器的系数矢量, 是 CM 误差函数。
是 CM 误差函数。
CMA 代价函数对接受信号的相位变化不敏感,因此在设计接收机时可以将载波同步和均衡独立。这种常数模算法的收敛性与自适应滤波器本身的收敛性相关。自适应滤波器的收敛性受到两个因素的影响[2] :一个是滤波器(线性)的阶数,收敛稳态误差随着阶数的提高趋向于零,但在有限冲激响应信道中,实际使用的都是有限阶数的横向滤波器,阶数带来的影响是不可避免的;另一个是迭代算法本身带来的影响,不同的算法会带来不同的收敛性,且与滤波器类型无关。以上两个因素都会带来所谓的线性均衡器收敛到局部最小点而非全局最小点的问题,从而引起伪收敛。
CMA 伪收敛问题可以从三个方面解决:
1)代价函数的改进通过对代价函数增加约束条件,在保证全局收敛点的情况下使局部收敛点变成不稳定点,从而避免伪收敛[3] 。但是难以找到既能保证 CMA 的全局收敛性又不会出现新的局部最小点的约束条件。
2)迭代方程的改进通过对迭代方程形式的改变来得到不同的收敛性能[4] 。但是这种方法只是改变方程的形式,算法的实质没有改变,原来的局部收敛点仍是新函数的极值点,因此伪收敛的问题仍然存在。
3)初始化系数的选择均衡器收敛到局部极小点的概率与滤波器的主径相关,若能确定好滤波器的主径,即可通过把主径的抽头初置为一,其他抽头初置为零的方法使得均衡器收敛到局部极小点的概率为零[5] ,但目前没有关于滤波器主径选择的有效方案。
《3 TDE - CMA 算法》
3 TDE - CMA 算法
在 CMA 的伪收敛情况,此时的均衡器相当于一个带一阶延时的 AGC 。主径被错误的估计为第二阶,从而导致错误的收敛结果,可以考虑在迭代过程中添加延时修正函数来修正主径的位置,从而获得正确的收敛结果。
TDE-CMA 算法
设滤波器的阶数为 N ,其抽头系数为 W =  ,标准调制信号的数据源集合为
,标准调制信号的数据源集合为 
Step 1 初始化系数

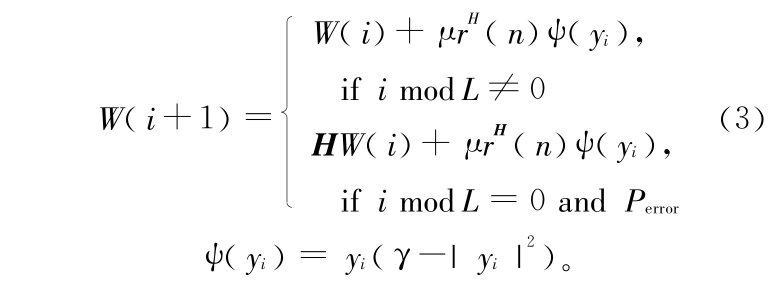
Step 2 迭代方程
Step 3 输出结果

其中 H 为时延校正因子, L 是用户定义的盲均衡样本数。每经过 L 点训练后,伪收敛判决模块就会对当前状态进行判断,再根据判断结果选择结束盲均衡或进行时延修正。 L 的取值和盲均衡的算法、当前迭代次数以及迭代步长有关,要保证在当前条件下经过 L 点后自适应滤波器已达稳定状态。在 CMA 算法中,迭代步长一般都取在 10-6 以下,因此 L 的值较大(在仿真中取 5 × 104)。此外, L 可以是一个变量,经过迭代修正后 L 值可以变小(仿真中取 104),由于保留以前的大部分系数,因此修正后的滤波器可以较快的收敛到新的平衡点,从而提高均衡速度。

伪收敛判决错误概率 Perror 用来判断收敛状态。Perror 代表收敛后判决的误码率。可以由两种方法测得:一是根据上层协议来检测;二是由计算式(4)的概率得到,该式代表收敛后输出星座图的集中状态。α 是用户取的一个很小的值,代表集中程度。正确收敛时的星座点集中在标准 QAM 点的附近,错误概率比较低;反之,错误概率较高。因此,通过检测这个错误概率可以判断收敛的对错。
式(3)中的时延校正因子 H 定义为
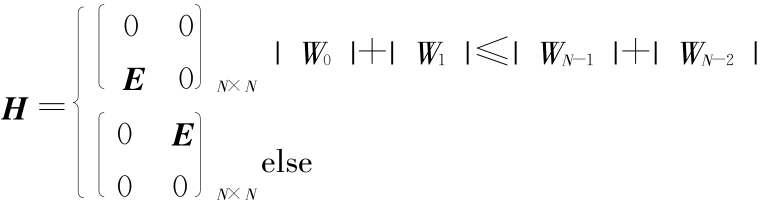

H 的作用实际上是将均衡器的主径沿着系数绝对值较小的一方平移:把影响较小的抽头去掉,引入新的抽头重新进行均衡。
TDE - CMA 算法的均衡器结构如图 1 所示:
《图 1》
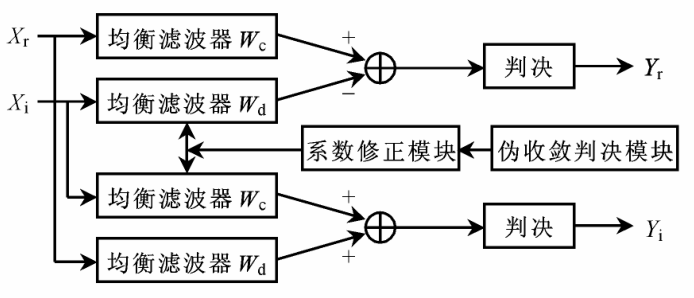
图 1 TDE-CMA 均衡器结构图
Fig.1 Structure of TDE-CMA equalizer
《4 仿真及结果分析》
4 仿真及结果分析
仿真条件参数为:信道系数是[1,- 0.7],调制方式为 BPSK ,二阶均衡器的系数为 [  ,
, ] ,迭代的步长为 10-4 ,初始系数设置了 20 组不同的情况进行观察[6] 。图 2 为在相同条件下用普通 CMA 和 TDE - CMA 两种算法分别进行盲均衡得到的滤波器系数的收敛轨迹,图3为伪收敛和正确收敛后的数据分布情况。
] ,迭代的步长为 10-4 ,初始系数设置了 20 组不同的情况进行观察[6] 。图 2 为在相同条件下用普通 CMA 和 TDE - CMA 两种算法分别进行盲均衡得到的滤波器系数的收敛轨迹,图3为伪收敛和正确收敛后的数据分布情况。
《图 2》
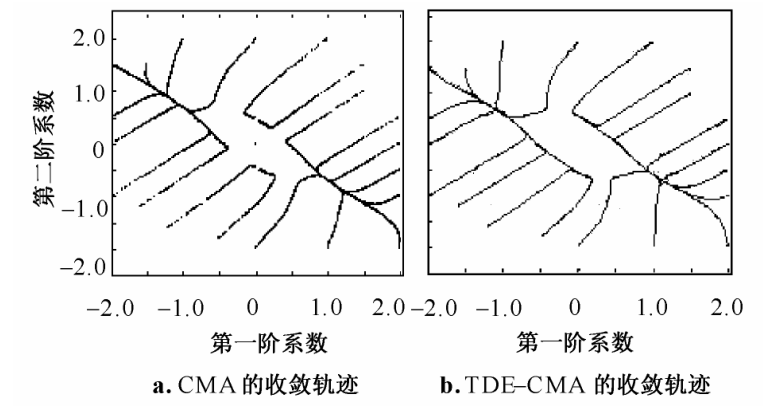
图 2 CMA 和 TDE-CMA 的收敛轨迹
Fig.2 Convergence trace of CMA and TDE-CMA
《图 3》

图 3 正确收敛后和伪收敛后的数据分布
Fig.3 Data distributing after correct convergence and ill-convergence
图 2 中的横坐标和纵坐标分别代表滤波器的第一阶和第二阶系数。在图 2a 中共存在 4 个收敛点,分别在±(1,- 0.7)和±(0,- 0.6)附近。其中±(1,- 0.7)是正确的收敛结果,±是由代价函数中 |  | 项引入的 Nπ( N 为整数)相位模糊,这点可以通过采用相关编码来消除;而±(0 ,- 0.5)则是由算法引入的伪收敛点。而采用 TDE - CMA 算法后尽管在仿真过程中也会出现伪收敛点,可是通过时延修正函数可以使得均衡结果回到正确位置。
| 项引入的 Nπ( N 为整数)相位模糊,这点可以通过采用相关编码来消除;而±(0 ,- 0.5)则是由算法引入的伪收敛点。而采用 TDE - CMA 算法后尽管在仿真过程中也会出现伪收敛点,可是通过时延修正函数可以使得均衡结果回到正确位置。
采用高阶 QAM 调制仿真的仿真结果如图 4 所示。在 [ - 0.005 - i0.004 , 0.009 + i0.030 , - 0.324 - i0.204 , 0.854 + i0.520 , - 0.318 + i0.373 , 0.049 - i0.074 , - 0.016 + i0.020]的信道条件下[7] ,采用 13 阶均衡器,步长为 10 - 7 , W[0]= e1 时得到的星座图。图 4a 为采用 CMA 算法的结果,图 4b 为采用 TDE - CMA 算法经过一次时延修正后的结果,图 4c 为 TDE - CMA 算法的最后输出结果(中间经过两次时延修正)。
《图 4》
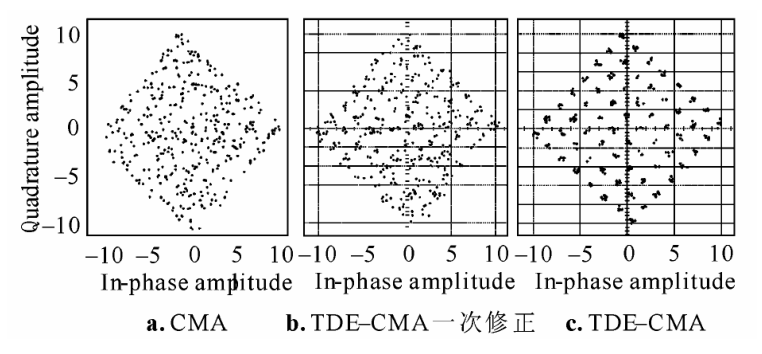
图 4 CMA 和 TDE-CMA 的算法输出
Fig.4 Output of CMA and TDE-CMA
《5 结语》
5 结语
这种改进的 TDE-CMA 盲均衡算法很好地解决了 CMA 的伪收敛问题,且具有算法结构变动小,运算量少的特点,因此具有很强的实用价值。其特点是准确地找寻到当前滤波器中最合适的主径位置,使得当前滤波器可以得到有效利用。在 3G 互连设备中,考虑到远距离和高速率 2 个特点,码间干扰现象会更加严重;另一方面,过高阶数的高速滤波器在 FPGA 中实现也是困难的,因此,需要用尽量低阶的均衡器来解决问题。 TDE - CMA 算法完全可以满足以上需要,适合在 3G 互连设备中使用。











 京公网安备 11010502051620号
京公网安备 11010502051620号




