
《1 引言》
1 引言
多基地雷达系统跟踪近距离多个高速机动目标时需要有很强的实时性,既要能精确计算目标的运动状态,又要保证计算过程尽快收敛。 MSJPDA 算法 [1,2] 能在密集杂波环境下实现有效的数据关联,但其复杂的计算过程需要被合理优化,才可投入实时性应用;量测数据中的方位仰角需要通过慢速的天线扫描方式来获取,难以符合高实时性的要求;基于一维测距信息的快速滤波算法[3,4] 有较好的实时性,却在跟踪高速高机动性能的目标时,变得不稳定,难以维持好的收敛特性。
由于多基地雷达系统中各接收机条件概率的计算过程互不相关,因此可考虑将整个观测数据的关联过程拆分成若干个并行执行的子关联过程;在跟踪确定目标时,可考虑引入一个三维的速度滤波过程与位置滤波过程并行执行,同时对距离和拟测值和多普勒速度拟测值进行迭代滤波。
《2 观测模型》
2 观测模型
《2.1 观测集合的获取》
2.1 观测集合的获取
假设在多基地雷达系统监视区内有 I 个目标待估计,I 是未知的。假定在 k 时刻第 i 个目标的位置和速度在笛卡儿直角坐标系中描述,分别表示为

假定量测系统由一个发射机和 N 个非并列放置的接收机组成,其位置分别为

为了精确获得跟踪区域内各个高速机动目标的运动轨迹,前端接收机群需工作于高速采样模式,这时测量系统能够提供给融合数据处理中心的瞬时测量参数只有两类数据(假定在采样时刻 k):
一类是根据回波时移获得的发射机到目标与目标到各个接收机之间的距离和,可表示为

对于第 j 个接收机,

一类是根据回波频移获得的目标相对于各个接收机的多普勒速度[5] ,可表示为



而对于第 j 个接收机: =
=  +
+  。
。
在式(1)和式(2)中, 和
和  是观测噪声,服从于正态分布,其协方差阵分别为 ΩS 和 ΩU ,即
是观测噪声,服从于正态分布,其协方差阵分别为 ΩS 和 ΩU ,即

在多基地雷达群观测多目标的环境中,由于杂波和噪声的影响以及目标信号各向散射强度的不同,接收机存在虚警和漏警。假设接收机检测获得的回波为如下两种情况:
H1 ———接收机的观测数据源于目标;
H0———接收机的观测数据源于杂波或虚警。
假定源于同一目标的距离和数据与多普勒速度相互关联,接收机 j 在 k 时刻的观测值可以表示为

其中 njk 是第 j 个接收机在 k 时刻检测到的回波总数,ij 表示回波的序号, 表示为接收机 j 漏测时的假测量值。于是,对于 k 时刻,来自接收机 j 的以及整个监视域内的测量集合可分别表示为
表示为接收机 j 漏测时的假测量值。于是,对于 k 时刻,来自接收机 j 的以及整个监视域内的测量集合可分别表示为

k 时刻以前接收机的所有观测集合可表示为

假定源于目标的距离和观测值和多普勒速度观测值受高斯噪声干扰,即

《2.2 观测关联的基本模型》
2.2 观测关联的基本模型
为表示第 j 个接收机有效回波与各目标跟踪门的关系,Bar-Shalom 引入了确认矩阵的概念,其定义为:Ωj = { }(i = 0,…,I ;ij = 1 ,…,njk;j = 1 ,…,N)。其中 是二进制变量, = 1 表示量测 ij 落入目标 i 的跟踪门内,而 = 0 表示量测 ij 没有落入目标i的跟踪门内。i = 0 表示没有目标,此时 Ωj 对应的列元素
}(i = 0,…,I ;ij = 1 ,…,njk;j = 1 ,…,N)。其中 是二进制变量, = 1 表示量测 ij 落入目标 i 的跟踪门内,而 = 0 表示量测 ij 没有落入目标i的跟踪门内。i = 0 表示没有目标,此时 Ωj 对应的列元素  全都是 1 ,这是因为任何一个量测都可能源于杂波或者虚警。
全都是 1 ,这是因为任何一个量测都可能源于杂波或者虚警。
设 θjk = { }
} 表示第 j 个接收机 k 时刻所有可能的联合事件集合,mjk 表示集合 θjk 中元素的个数。其中
表示第 j 个接收机 k 时刻所有可能的联合事件集合,mjk 表示集合 θjk 中元素的个数。其中

代表第  个联合事件,表示 njk 个量测匹配于各自目标的一种可能,
个联合事件,表示 njk 个量测匹配于各自目标的一种可能, 表示量测 ij 在第 个联合事件中源于目标 i 的事件(i
表示量测 ij 在第 个联合事件中源于目标 i 的事件(i  I ),
I ), 表示量测 ij 在第 个联合事件中源于杂波或虚警。
表示量测 ij 在第 个联合事件中源于杂波或虚警。
设 表示第 ij 个量测与目标 i 互联的事件,则

这个事件称为互联事件, 表示第 j 个接收机在 k 时刻没有任何量测源于目标 i 的事件。为了计算这些联合事件和互联事件的概率,互联事件必需满足下列两个基本假设:
表示第 j 个接收机在 k 时刻没有任何量测源于目标 i 的事件。为了计算这些联合事件和互联事件的概率,互联事件必需满足下列两个基本假设:
1) 每一个量测有唯一的源,即任一个量测不源于某一目标,则必源于杂波或虚警;
2) 对于一个给定的目标,最多有一个量测以其为源。
满足上述两个假设的事件成为可能事件。
联合互联事件 可以表示成互联矩阵:

其中只有当  时,
时, ()= 1 ,其余状态
()= 1 ,其余状态  () = 0 。互联矩阵表示在第 个联合事件中,第 ij 个量测值是否源于目标 i 。
() = 0 。互联矩阵表示在第 个联合事件中,第 ij 个量测值是否源于目标 i 。
根据上述两个基本假设可推出互联矩阵满足:


定义量测互联指示为
表示量测 ij 在联合事件 中是否跟一个真实目标互联。
定义目标检测指示为

表示任一量测在联合事件 中是否与目标 i 互联,亦即目标 i 是否被检测。
假设  ()表示在联合事件 中虚假量测的数量,则
()表示在联合事件 中虚假量测的数量,则

《3 并行多基地雷达多目标跟踪算法》
3 并行多基地雷达多目标跟踪算法
《3.1 目标的运动模型》
3.1 目标的运动模型
假定第 i 个目标在 k 时刻的位置和速度分别表示为


T 为系统的采样周期; = diag [ 1 1 1 ] ,为状态转移矩阵;
= diag [ 1 1 1 ] ,为状态转移矩阵; = diag [ T T T ] ,表示模型噪声对状态估计影响的转移矩阵;ωR 为位置模型噪声向量,其协方差矩阵
= diag [ T T T ] ,表示模型噪声对状态估计影响的转移矩阵;ωR 为位置模型噪声向量,其协方差矩阵

ωV 为速度模型噪声向量,其协方差矩阵

Ak 是目标三维加速度矢量。
《3.2 用并行扩展卡尔曼滤波跟踪确定目标》
3.2 用并行扩展卡尔曼滤波跟踪确定目标
对于某个确定目标的跟踪,可以将标准卡尔曼滤波方程分别应用于该目标的位置计算过程和速度计算过程。该方法采用两个并行的三维迭代估计器,一个通过 MSJPDA 拟合测距信息做输入,一个通过 MSJPDA 拟合多普勒测速信息做输入,并在运算过程中合理的引入了针对目标机动加速度的估计,就可准确跟踪到高速机动目标的运动形态。
位置滤波进程如下:


速度滤波进程如下:

加速度估计如下:

其中  是位置滤波最佳增益矩阵,
是位置滤波最佳增益矩阵, 是位置预测误差的协方差矩阵,
是位置预测误差的协方差矩阵, 是速度滤波最佳增益矩阵,
是速度滤波最佳增益矩阵,  是速度预测误差的协方差矩阵。
是速度预测误差的协方差矩阵。  是距离和观测方程的线性化系数矩阵。
是距离和观测方程的线性化系数矩阵。 表示在 k 时刻 j 号接收机第 ij 个回波与目标 i 正确关联的条件概率。
表示在 k 时刻 j 号接收机第 ij 个回波与目标 i 正确关联的条件概率。
该方法采用并行处理机制,计算速度与单个位置迭代滤波相当,但却在跟踪高加速机动目标时具有很好收敛性和稳定性。
《3.3 条件概率的计算》
3.3 条件概率的计算
文献[6]给出了基于关联模型将确认矩阵拆分为互联矩阵并获得 MSJPDA 条件概率 的推导过程。假定虚假量测先验概率服从于泊松分布,基于观测距离和以及多普勒相对速度的量测输入情况下:


其中 c′ 是归一化常数,PD 是目标检测概率,  是第 j 个接收机对于第 i 个目标在 k 时刻的互联信息协方差,
是第 j 个接收机对于第 i 个目标在 k 时刻的互联信息协方差, 代表目标 i 的预报观测值。
代表目标 i 的预报观测值。
《3.4 算法流程》
3.4 算法流程
实时多任务操作系统的迅速发展促进了复杂多进程并行算法的设计开发。为了基于多基地雷达系统的观测值 Zk 和 Zk - 1 获得多个高速机动目标的运动航迹,提出了一套基于并行处理机制的跟踪算法。
图 1 给出了该算法跟踪多目标中某个确定目标 i 的工作流程。对应 N 个接收机,跟踪算法包含 N 个并行的同优先级关联进程:每个关联进程的输入是其对应接收机的观测数据 Zjk,各个目标的跟踪门根据观测数据的匹配情况给出确认矩阵 Ωj,在将确认矩阵拆分为互联矩阵后,根据式 22 至式 24 ,每个关联进程算出该接收机观测目标 i 的所有条件概率  ,
, ,…,
,…, ,njk 是该进程收到有效观测数据个数。目标 i 的位置滤波进程收到各关联进程送来的条件概率和距离和观测值,根据式 15 至式 17 ,迭代计算出目标的位置状态;其速度滤波进程则收到各接收机条件概率和多普勒速度观测值,根据式 18 至式 20,迭代计算出目标的速度状态。
,njk 是该进程收到有效观测数据个数。目标 i 的位置滤波进程收到各关联进程送来的条件概率和距离和观测值,根据式 15 至式 17 ,迭代计算出目标的位置状态;其速度滤波进程则收到各接收机条件概率和多普勒速度观测值,根据式 18 至式 20,迭代计算出目标的速度状态。
《图1》

图1 算法跟踪第 i 个确定目标的流程图
Fig.1 Algorithm flowchart for tracking the ith target
由于各接收机关联进程的计算过程相互独立,而且计算量相当,因此可以并行执行。确定目标的位置滤波和速度滤波进程同样计算量相当,尽管速度滤波进程需要位置滤波进程送来位置预测值  ,用以计算系数矩阵
,用以计算系数矩阵  ,但是我们注意到:相对于同一时间基准,位置滤波进程的 计算要先于速度滤波进程的 计算,并可将算出的 事先存放于消息缓冲区中,因此速度滤波进程不会在计算过程中出现被迫等待 的情况,这样就保证了双滤波进程的实时并行性。由于不同确定目标的滤波过程也相互独立而且计算量相当,因此同样的并行方式可以扩展到跟踪多目标的情况,操作系统只需要根据确定目标的数目和当前航迹状态开辟相应的双滤波进程即可。文章并不讨论确定目标数目 I 的获取以及多目标初始航迹的建立过程,在文献[7,8]中有详细叙述。
,但是我们注意到:相对于同一时间基准,位置滤波进程的 计算要先于速度滤波进程的 计算,并可将算出的 事先存放于消息缓冲区中,因此速度滤波进程不会在计算过程中出现被迫等待 的情况,这样就保证了双滤波进程的实时并行性。由于不同确定目标的滤波过程也相互独立而且计算量相当,因此同样的并行方式可以扩展到跟踪多目标的情况,操作系统只需要根据确定目标的数目和当前航迹状态开辟相应的双滤波进程即可。文章并不讨论确定目标数目 I 的获取以及多目标初始航迹的建立过程,在文献[7,8]中有详细叙述。
《4 仿真分析》
4 仿真分析
以一个发射机 5 个接收机以及 4 个运动目标为例验证所提算法的有效性。假定发射机位于笛卡儿坐标系的原点,5 个接收机的坐标分别为(0,0,0),(0,250,30),(0,- 250,- 15),(-250,0,20),(250,0,5),位置单位为 m;假设接收机群的测距测速误差分别为 σS = 2 m,σU = 5 m/s 。 4 个运动目标的起始状态按照(x,y,z,Vx, Vy, Vz, Ax, Ay, Az )设置,分别为目标 1(500,0,250,- 250,0,- 20,0,0,- 25)、目标 2(- 600,20,200,300,- 20,0,0,0,- 25)、目标 3 (- 500,- 450,250,250,200,0,0,0,- 20)、目标 4(600,50,200,- 250,0,0,- 35 ,0,0),位置单位为 m,速度单位为 m/s,加速度单位为 m/s2 ;目标 1, 2,3 做抛物线运动,目标 4 做匀加速直线运动。假定接收机每个周期虚假量测数 NC 的先验概率密度服从于泊松分布,取  = 5 ,虚假量测随机均匀地分布在接收机的有效检测空间内。采用所述的多关联进程 MSJPDA 拟合观测值作为跟踪进程的输入,用并行扩展卡尔曼滤波算法对目标进行跟踪,并与快速卡尔曼滤波结果 [3,4] 进行比较。
= 5 ,虚假量测随机均匀地分布在接收机的有效检测空间内。采用所述的多关联进程 MSJPDA 拟合观测值作为跟踪进程的输入,用并行扩展卡尔曼滤波算法对目标进行跟踪,并与快速卡尔曼滤波结果 [3,4] 进行比较。
图 2 给出了 4 号接收机在连续 50 个扫描周期内产生的杂波点与目标真实点示意图。图 3 给出了多个目标真实航迹和滤波输出的示意图,由图 3 可知使用笔者提出的算法能够在杂波中有效的跟踪多个机动目标。图 4,图 5 分别给出了用并行扩展卡尔曼滤波算法(PEKF)和快速卡尔曼滤波算法(FKF)跟踪 1 号目标的示意图,图 6,图 7 给出了两种跟踪算法在跟踪 1 号目标时的均方根位置误差和均方根速度误差曲线。可以看出,相对于快速卡尔曼滤波算法,并行扩展卡尔曼滤波算法在跟踪含机动加速度的高速目标时,收敛速度更快,而且稳定后的位置误差在 1 m 以内,速度误差在 5 m/s 以内,滤波输出更加平稳均匀。
《图2》

图2 4 号接收机连续 50 次扫描的量测值
Fig.2 True and false measures in 50 sequence scans for receiver 4
《图3》
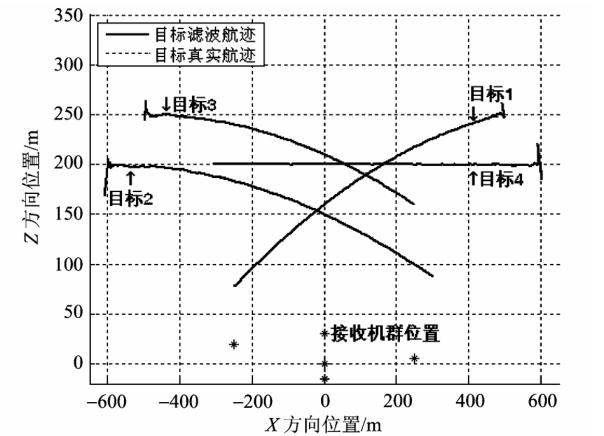
图3 目标真实航迹与滤波航迹的比较
Fig.3 Comparison between target's true trace and filter trace
《图4》
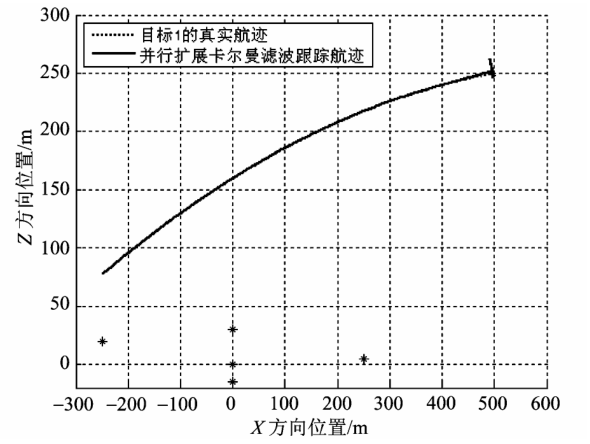
图4 采用并行扩展卡尔曼滤波跟踪目标 1 曲线
Fig.4 Tracking Target 1 with PEKF
《图5》
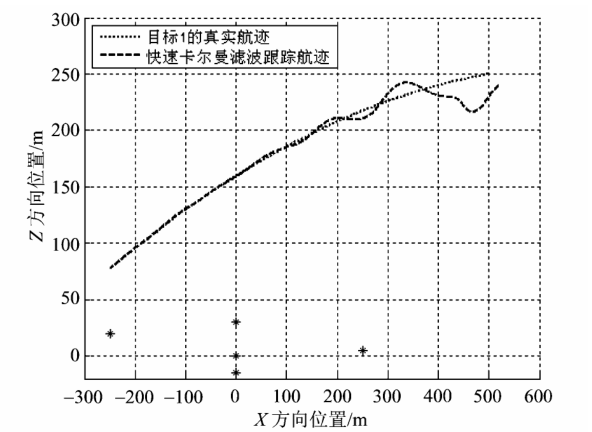
图5 采用快速卡尔曼滤波跟踪目标 1 曲线
Fig.5 Tracking target 1 with FKF
《图6》

图6 跟踪目标 1 时两种算法位置误差曲线比较
Fig.6 RMS position error comparison between PEKF and FKF
《图7》
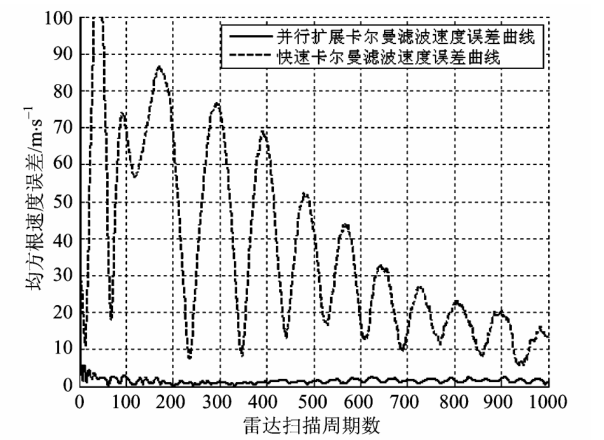
图7 跟踪目标 1 时两种算法速度误差曲线比较
Fig.7 RMS velocity error comparison between PEKF and FKF
《5 结论》
5 结论
提出了一种基于并行处理机制的多基地雷达多目标跟踪算法,用于跟踪杂波环境下多个高速运动的机动目标。该算法将整个观测数据的关联过程拆分成若干个并行子关联进程,并将确定目标的跟踪过程拆分成两个并行的三维子进程,同时对距离和拟测值和多普勒速度拟测值进行迭代滤波。仿真结果表明,该算法不仅能够在杂波中有效地跟踪多个机动目标,而且对高速高机动目标的跟踪特性也获得很好改善,其并行处理结构保证了算法的快速实时性,非常适合近距离对高加速机动目标的精确跟踪。











 京公网安备 11010502051620号
京公网安备 11010502051620号




