School of Electric and Automation Engineering , Tianjin University , Tianjin 300072 , China
Funding project: 国家自然科学基金资助项目(60574026)
Received: 2005-01-17
Revised: 2005-04-19
Available online: 2006-04-20
Abstract
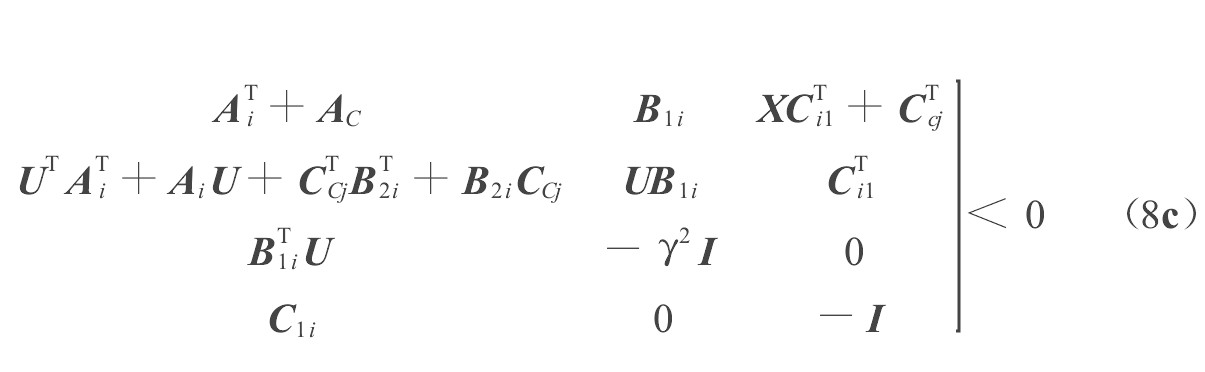
The design of dynamic output-feedback controller is investigated for the descriptor fuzzy TS models. By transforming the design problem into the feasible solution problems to a set of linear matrix inequalities, the properly stabilizing output controllers are obtained. The resulting closed-loop system can be ensured to satisfy certain performance index and locate at the required pole-placement region.
[ 1 ]
Takagi T, Sugeno M.Fuzzy identification of systems andits applications to modeling and control[J].IEEE TransSystems Man and Cybemetics, 1985, 15 (1) :116~132
[ 2 ]
rosenbrock H H.Structure properties of linear dynamicalsystems[J].Int J of Contr, 1974, 20 (2) :191~202
[ 3 ]
Jun Y, Ichikawa A.H∞control for Takagi-Sugeno fuzzydescriptor system[A].Proc of IEEE Int Conf Syst, Manand Cyber, IEEEⅢ[C].Japan Tokyo, 1999.28~33
[ 4 ]
Taniguchi T K, Tanaka K, Wang H O.Fuzzy descriptorsystems and nonlinear model following control[J].IEEETrans Fuzzy Systems, 2000, 8:442~452
[ 5 ]
Gao Z W, Shi X Y. Observer design for TS fuzzy systems with measurement output noises [R]. IFAC World Congress, Prague, 2005
[ 6 ]
Chilali M, Gahinet P.H∞design and pole placementconstraints:an LMI approach[J].IEEE Trans AutomaticControl, 1996, 41 (3) :335~346
[ 7 ]
Zhang G F, Zhang Q L, Zhang J H, Robust circular poleassignment for uncertain continuous descriptor systems[A].Proceedings of the 3nd Asian Control conference[C].Shanghai:Jiaotong University Press, 2000.1022~1027






















 京公网安备 11010502051620号
京公网安备 11010502051620号




