
《1 引言》
1 引言
基本模糊控制器实际上是一种非线性控制器。与常规PID控制器相比, 在动态响应与抑制系统内部参数变化对系统输出的影响方面均优于常规PID控制器
为了弥补其不足, 笔者提出了一种控制规则自调整模糊控制技术, 使模糊控制器的控制规则在控制过程中能够自动调整和完善, 从而使系统的控制性能得到改善, 达到预期的效果;并且结构简单, 便于工程应用。
《2 控制规则自调整的模糊控制器》
2 控制规则自调整的模糊控制器
《2.1 基本模糊控制器原理及其缺陷》
2.1 基本模糊控制器原理及其缺陷
在实际运用中, 常常以输入量与输出量之间的偏差e和偏差变化率c作为采样信息。这里, 定义
实际上偏差e与偏差变化率c都是连续变化的量, 这里只取-3到+3之间的整数。把连续量离散为有限个数值是为了推理合成的方便。但这种离散化也造成量化偏差的存在, 从而引起系统出现稳态偏差, 造成不良影响。
根据人们对过程控制的实际经验的总结
根据上述每一条控制规则, 采用Mamdani
表1 推理语言规则 Table 1 The linguistic rules of inference
《表1》
| NB | NM | NS | NO | 0 | PS | PM | PB | |
| PB PM PS 0 NS NM NB | PB PB PB PB PB * * | PM PM PM PM PM * * | NB NM NS PS PS PS PB | NB NM NS 0 PS PS PB | NM NM NS 0 PS PM PB | NB NS NS NS PS PM PB | * * NM NM NM NM NM | * * NB NB NB NB NB |
* 表示在控制过程中不可能出现那种情况
对输入A*i 和B*i, 由Mamdani模糊推理算法
其中‘。’为max-min算子, ‘∧’为取小运算。
总的控制输出采用并取的办法来获得, 即
按上述推导公式及步骤计算, 可得控制表见表2。
《表2》
| euc | -3 | -2 | -1 | 0 | 1 | 2 | 3 |
| -3 | -3 | -3 | -3 | -2 | -2 | -1 | 0 |
| -2 | -3 | -2 | -2 | -2 | -1 | 0 | 1 |
| -1 | -2 | -2 | -1 | -1 | 0 | 1 | 1 |
| 0 | -2 | -1 | -1 | 0 | 1 | 1 | 2 |
| 1 | -1 | -1 | 0 | 1 | 1 | 2 | 2 |
| 2 | -1 | 0 | 1 | 2 | 2 | 2 | 3 |
| 3 | 0 | 1 | 2 | 2 | 3 | 3 | 3 |
设控制对象的传递函数为1/ (s2 +s) , r为r (t) =1 (t) , 采用上述模糊控制方法, 用Simulink工具箱仿真得到的阶跃响应曲线如图1所示。可以看出, 基本模糊控制器是一种粗糙的控制器, 其动态性能虽然好于传统PID控制, 但存在稳态误差, 并不能满足实际工程对系统高控制精度及稳态性能的要求, 不能应用在控制精度要求高的场合。
《图1》
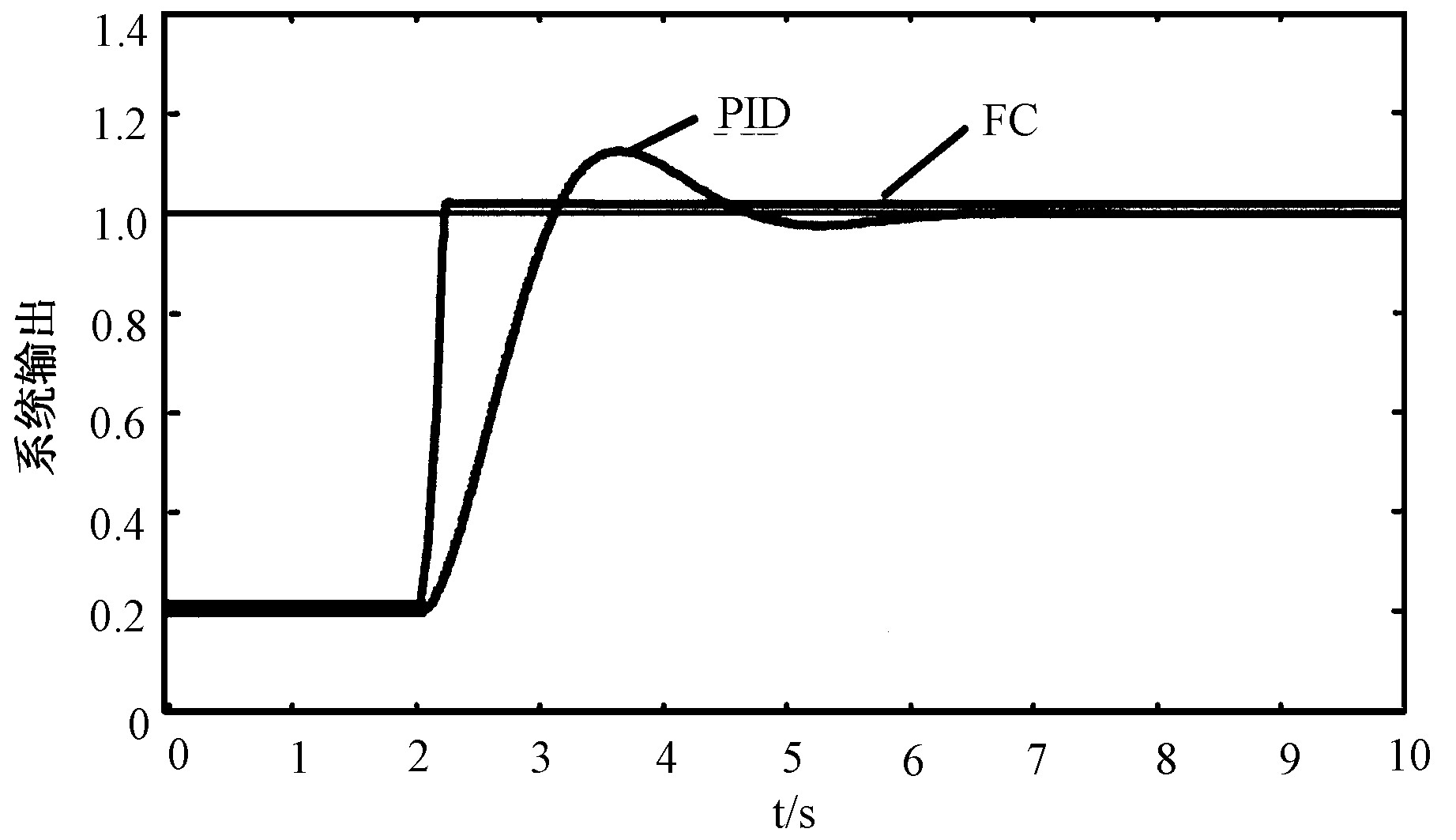
图1 基本模糊控制器与PID 控制器的阶跃响应曲线 Fig.1 Comparison of the step response of the basic FC and PID
《2.2 控制规则自调整的模糊控制器》
2.2 控制规则自调整的模糊控制器
为了提高基本模糊控制器的控制精度和消除稳态误差, 笔者在基本模糊控制器的基础上, 提出了一种控制规则自调整的模糊控制器。控制规则自调整是提高和改善模糊控制器的关键, 上述基本模糊控制器的控制规则是固定不可调整的。笔者应用修正因子法建立模糊控制器模型, 对不同的控制对象, 通过调整修正因子, 改变对偏差e和偏差变化率c的加权程度, 从而调整了控制规则, 实现控制规则的在线自调整, 达到了改善系统稳态性能的目的。
根据上述所计算的控制表2, 模糊控制模型结构可采用下列解析表达式
式中, a为修正因子, 又称加权因子。a的取值大小直接表示对偏差e和偏差变化率c的加权程度, 这种加权也反应了操作者进行手动控制时的思维特点。
当a=0.5时, 根据式 (4) 可计算得到控制规则表如表3所示。
表3 a=0.5 时的控制规则表 Table 3 The rule table when a=0.5
《表3》
| euc | -3 | -2 | -1 | 0 | 1 | 2 | 3 |
| -3 | -3 | -3 | -2 | -2 | -1 | -1 | 0 |
| -2 | -3 | -2 | -2 | -1 | -1 | 0 | 1 |
| -1 | -2 | -2 | -1 | -1 | 0 | 1 | 1 |
| 0 | -2 | -1 | -1 | 0 | 1 | 1 | 2 |
| 1 | -1 | -1 | 0 | 1 | 1 | 2 | 2 |
| 2 | -1 | 0 | 1 | 2 | 2 | 2 | 3 |
| 3 | 0 | 1 | 1 | 2 | 2 | 3 | 3 |
比较表1和表2, 可以看出两者的控制动作基本一致。显然, 采用解析表达式描述的控制规则更加简单方便, 更容易实现计算机实时控制和实际工程应用。
对二维模糊控制系统来说, 当偏差较大时, 控制系统的任务是消除偏差, 这时对偏差的加权应该大些, 即修正因子a大一些;相反, 当偏差较小时, 此时系统接近稳态, 控制系统的主要任务是使系统尽快稳定, 为此需减小系统超调, 这就要求在控制规则中对偏差变化的控制作用大些, 即对偏差变化加权大一些, 即修正因子a小一些。因此, 在不同的偏差范围时, 采用不同的加权因子, 以实现控制规则的自调整。
对修正因子a的调整, 在基本模糊控制的基础上, 根据实际经验对其按偏差大小自调整, 同时可以使修正因子连续变化, 从而使控制量连续变化。实验仿真证明采用这种自适应模糊控制器可以消除稳态误差。
模糊控制规则的调整按下述解析式确定:
式中 修正因子a0, a1, a2, a3∈[0, 1], 〈*〉表示按四舍五入取整, 通常a0<a1< a2< a3。
控制系统的结构如图2所示。
《图2》
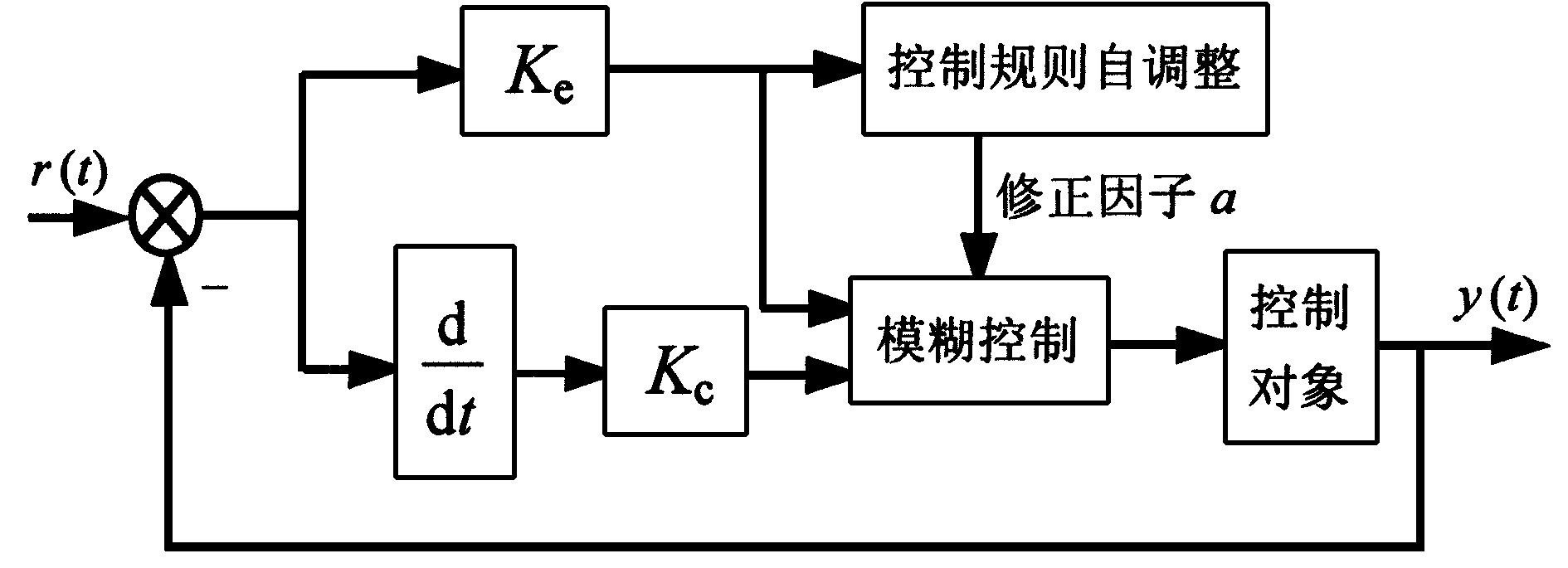
图2 规则自调整模糊控制器的结构图 Fig.2 The architecture of the rule auto-tuning FC
凭经验确定修正因子a会带来一定的盲目性, 很难获得一组最佳的参数。为此, 笔者采用ITAE (I表示积分, T表示时间, AE表示绝对误差) 积分性能指标, 进行模糊控制规则自寻优。ITAE性能指标的表达式为
式中J表示偏差函数加权时间之后的积分面积的大小。该性能指标能够较好的反映系统单位阶跃响应快、调节时间短、超调量小以及稳态偏差小等特性。寻优过程可根据目标函数值不断减小的原则, 不断的校正修正因子的取值, 最终可以获得一组优选的修正因子。
《3 实验仿真》
3 实验仿真
用Simulink对作者提出的控制规则自调整的模糊控制器做了仿真, 数学模型如图3所示。在Simulink仿真中, 采用NCD模块进行参数寻优。初选的各修正因子的初始值 {a0, a1, a2, a3} = {0, 0.2, 0.6, 1}, 则性能指标J0=0.08。用ITAE积分性能指标寻优后, 得到一组优选的修正因子{a0, a1, a2, a3 }={0, 0.1, 0.45, 1}, 这时性能指标J=0.045。
《图3》
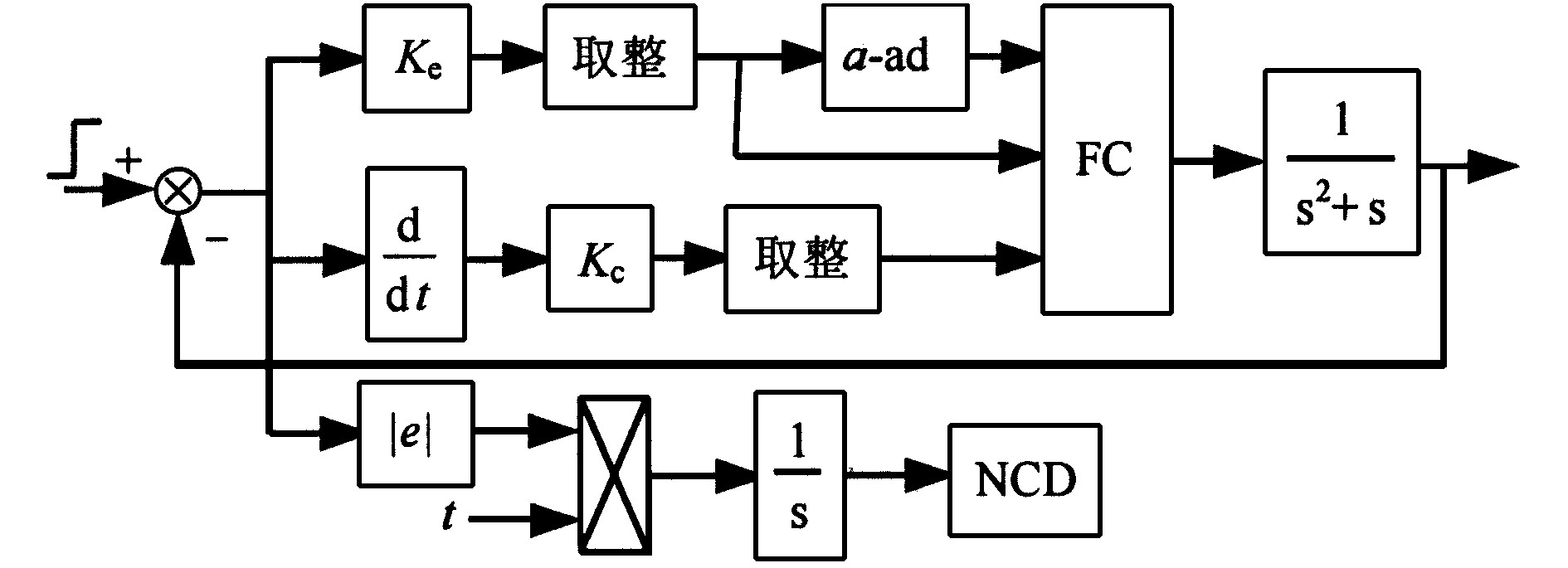
图3 Simulink仿真数学模型 Fig.3 The model in Simulink for simulation
优化后的控制规则阶跃响应曲线如图4所示, 与基本模糊控制器相比, 已经消除了稳态误差, 并且在动态性能上也得到了改善, 取得了令人满意的效果。
《图4》
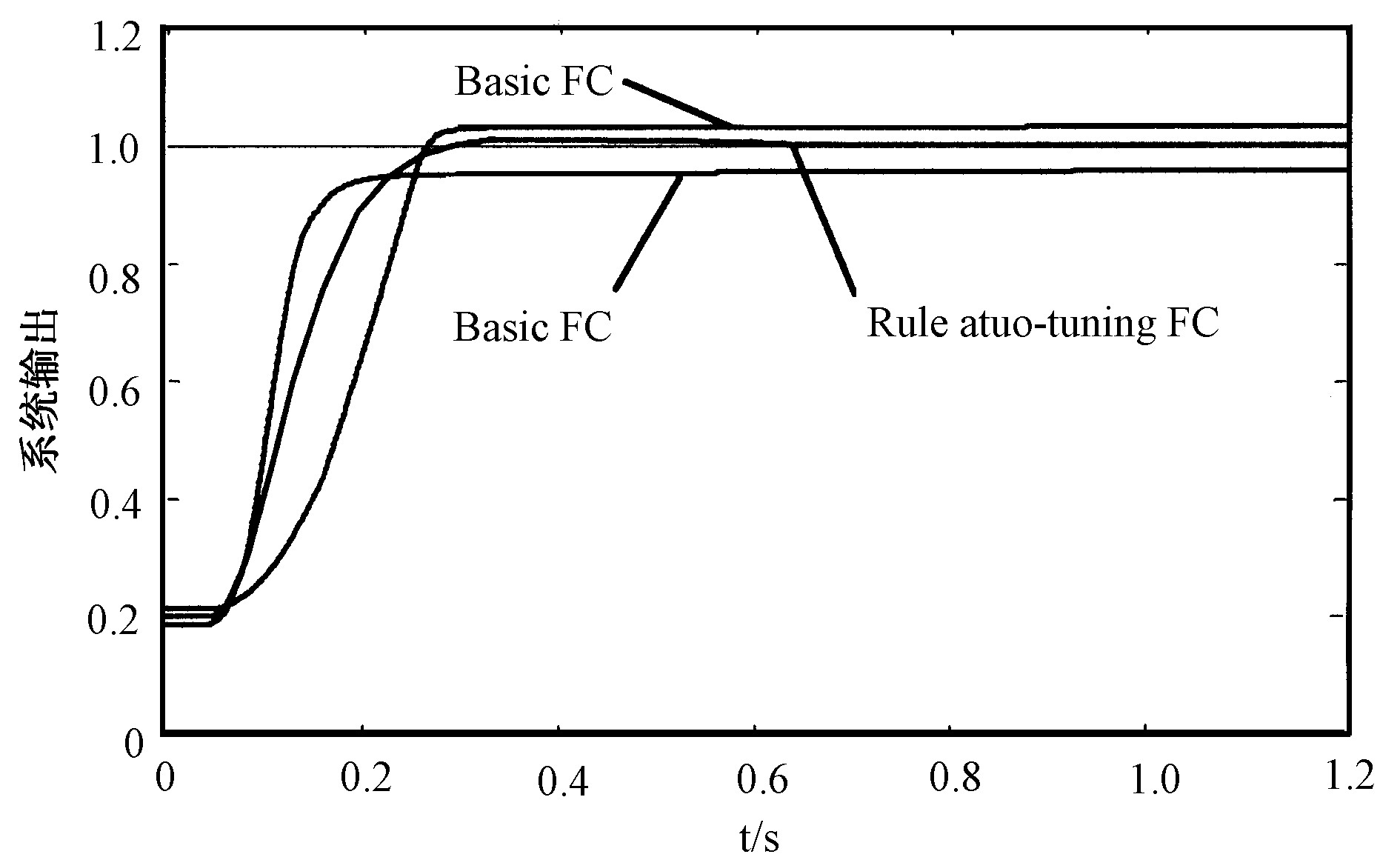
图4 规则自调整模糊控制器的阶跃响应曲线 Fig.4 The step response of the rule auto-tuning FC
《4 结论》
4 结论
通过在线调整模糊控制器的控制规则, 消除了基本模糊控制器存在的稳态误差, 改善了系统的动态性能和稳态性能。控制规则自调整模糊控制器的结构易于工程实现, 具有简单、易行、稳定、可靠的优点。目前已经用于液压伺服控制系统, 用以取代传统的PID控制器, 并已取得了良好的控制效果。











 京公网安备 11010502051620号
京公网安备 11010502051620号




