

《1 前言》
1 前言
在抽水蓄能电站中, 为了提高机组效率, 蓄能机组作电动机—水泵运行时, 其转速略高于发电机工况时的转速为宜, 要求电机应具有变速功能。若采用可变速电机, 在发电机运行时, 使水轮机能始终处在最佳工况下运行, 可提高效率3%~10%
我国大部分河流多泥沙, 水头变化大。长期以来, 水轮机行业苦于无法解决由于汛期泥沙多而造成的水轮机转轮选型的困难。如采用可变速电机, 可使水轮机无论在丰水期或沽水期都能处于最佳工况下运行。大大减少水轮机叶片气蚀与泥沙磨损, 既提高了机组综合效率, 又延长了机组寿命
在大型水电站高坝建设中, 往往希望二期开发。若采用可变速电机, 可适应水轮机转速在比较大的范围内变化, 从而可实现在建设过程中低坝发电, 边建设边发电, 取得巨大的经济效益, 在西部水电开发中, 尤具特殊意义。
在风力发电中, 变速恒频是其关键技术, 特别是对于取消减速器装置的风力发电机, 采用可变速的风力发电机, 尤有特殊意义。对于新能源的潮汐发电, 潮起潮落, 也希望采用可变速同步电机。
在大型交流传动中, 如大型轧钢电机, 若采用交流变频同步电机, 变频器的功率与电机的功率相同, 价格昂贵。若采用作者提出的专利技术, 使变频器的功率大为减小, 机组的成本可大大降低。
随着电力工业的发展, 大功率长距离输电日益增多, 当系统处于低负荷时, 就必须进行无功补偿和调节。若同步电机能异步化运行, 即能进行快速无功补偿和调节, 必将提高电网质量和系统的稳定性, 这是当前我国电力工业所面临的重大问题。
1992年国际大电网会议上, 第11旋转电机学术委员会全体会议讨论认为新型变速同步电机应作为“电机的新发展和经验”的第一优先主题。前苏联、日本等国学者作了专题报告
90年代以来, 国外对于变速同步电机的研究, 主要是双馈交流励磁电机DFIM (doubly fed induction machine) , 即以日本日立公司400 MW大河内电站为代表的双馈交流励磁电机
基于上述分析, 可变速同步电机理论研究, 是当今电机的新发展, 是一个重要的基础性研究课题。无论从经济上, 还是从技术上, 我国应自行研制, 走出一条新路。作者经多年的研究, 提出一种新型可变速电机——双馈变速凸极同步电机, 并申报了国家发明专利 (专利申请号01128351.3)
《2 双馈变速凸极同步电机核心技术的特点》
2 双馈变速凸极同步电机核心技术的特点
双馈变速凸极同步电机采用双馈原理, 具有典型的凸极同步电机结构。定子具有p对极, 由正常工频电源馈电, 与普通交流电机相同。转子采用分裂凸极转子结构, 具有2p对磁极, 其上装有励磁绕组和阻尼绕组, 转子2p对磁极绕组构成二相 (或四相) p对极正交绕组。磁极绕组由低频交流变频电源供电, 二相绕组在空间上, 按相差90°电角度分布, 在时间上, 相差90°电角度, 产生圆形旋转磁场。双馈正交分裂磁极变速凸极同步电机的结构, 详见图1。
与传统的凸极同步电机相比, 定子结构相同, 主要的区别在于转子采用分裂磁极、正交励磁绕组, 转子励磁绕组是由低频交流变频电源供电。作者提出的新型变速同步电机, 关键在于将气隙磁场同步旋转速度与转子旋转速度分离。在转子励磁绕组中, 通以交流变频电流, 产生可变速的圆形旋转磁场。转子绕组产生的气隙磁场旋转速度为转子旋转速度与转子绕组产生的圆形旋转磁场相对转子运动的速度之和。当改变励磁绕组中交流变频电源频率时, 转子旋转速度将发生相应的变化;或者当转子旋转速度发生变化时, 相应地改变转子绕组的交流变频电源频率, 实现凸极同步电机变速恒频, 从而构成双馈变速凸极同步电机。
《图1》

Fig.1 variable speed doubly fed salient pole synchronous machine
1—定子 (2P=2) ;2—转子:Nα, Sα为转子α 相绕组的磁极, Nβ, Sβ为转子β相绕组的磁
综上所述, 这种具有原始创新的新型双馈变速凸极同步电机, 主要是针对大型水电机组实现凸极同步电机变速恒频。
《3 双馈变速凸极同步电机变速恒频的基本原理》
3 双馈变速凸极同步电机变速恒频的基本原理
为分析研究方便, 对于定子坐标系, 设定子U相绕组的轴线作为坐标原点, 定子空间沿圆周分布的坐标轴为θ, 对于转子坐标系, 设转子第一对磁极Nα的轴线作为坐标原点, 转子空间沿圆周分布的坐标轴为x, 转子以ωr的速度在空间旋转, 转子磁极绕组通以ωf频率的电流, γ为转子旋转坐标系相对于定子坐标系的相对位置, 其坐标系如图2所示。
由定转子坐标系的关系, 可以得到表达式:
其中, γ0为转子第一对磁极Nα轴线在t=0时的电角度, 即转子初始位置角。一般可以假定认为γ0=0。当转子以均匀速度旋转时,
当电机定子三相绕组通过的电流为i, 其幅值相等为
其中N为定子绕组每相每条支路串联绕组匝数, l为定子电流的有效值。p为电机的极对数, ν为谐波的级次, knν为电机ν次谐波的绕组系数, Fν为电机磁势ν次谐波的幅值。
《图2》

Fig.2 The stator and rotor reference frame of doubly fed salient pole synchronous machine
1—定子坐标系;Fs (θ, t) 其中, A为定子U相绕组的轴线; θ为定子空间沿圆周分布的坐标轴;t为时间变量; 2—转子旋转坐标系:Ff (x, t) , 其中, γ为转子旋转坐标系相对于定子坐标系的相对位置;ωr为转子在空间的旋转速度;ωf为转子磁极绕组电流的频率; x为转子空间沿圆周分布的坐标轴
对于转子励磁绕组的磁场分析, 它由α相的磁极Nα, Sα及β相的磁极Nβ, Sβ 绕组组成, 励磁绕组为集中绕组, 相应的的匝数为Nfα, Nfβ, 并且α, β二相绕组的匝数均相等为Nf, 即Nfα=Nfβ=Nf, 相应通过二相绕组的低频交流电流为ifα、ifβ, 其有效值相等为If, 其频率为ωf, 其相位差为
对于α、β相绕组的磁势为
转子α, β二相绕组的基波磁势分布如图3所示。
《图3》
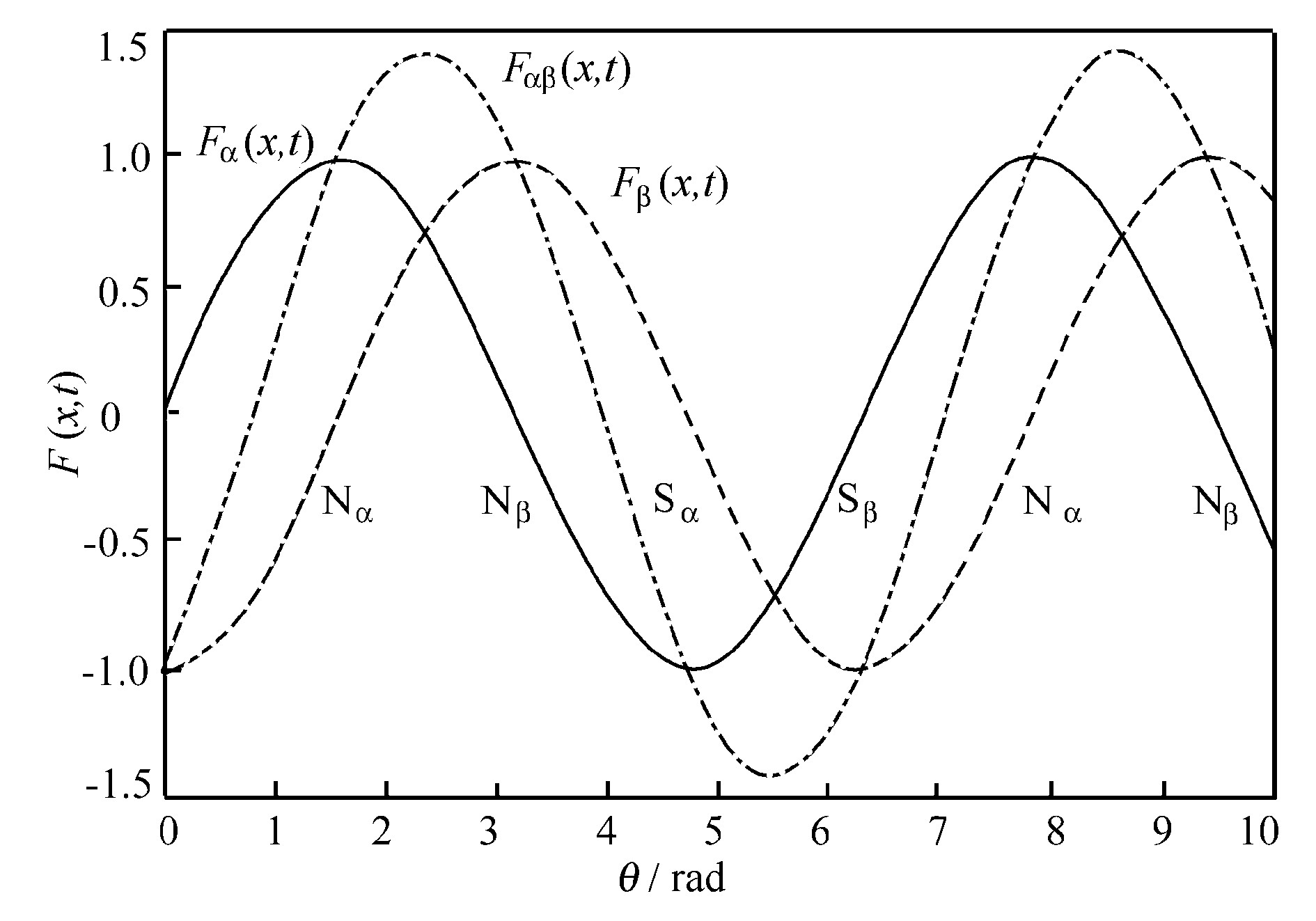
Fig.3 The rotor M.M.F of doubly fed salient pole synchronous machine
1—转子, Nα, Sα为转子α相绕组基波磁势的波形 2—转子, Nβ, Sβ为转子β相绕组基波磁势的波形
转子α, β二相绕组的合成磁势为
根据定转子坐标系二者的关系, x=θ-ωrt, 将其代入转子α, β二相绕组的合成磁势, 得到关系式,
根据机电能量转换的基本原理和定转子气隙磁场相对静止的概念, 对于气隙磁场基波而言, 即ν=1时, 瞬时功率Pm及电磁转矩Tem为
当
当转子转速ωr<ωs时, 即转差率
当ωf=0时, 且α=0时, 即对转子绕组馈入直流电源时, 与传统同步电机类似, ωr=ωs, 电机转子转速为同步转速。
作者提出的结构, 突破了传统概念, 定转子绕组产生的气隙磁场, 仍然保持相对静止, 但将气隙磁场同步旋转速度与转子旋转速度分离, 以实现转子变速, 这在原理上和结构上的有所创新。
《4 试验样机及实验分析》
4 试验样机及实验分析
该变速凸机同步电机样机的设计数据如下:
功率30 kW, 额定电压400/231 V, 极数2p=4, 功率因数cos=0.8, 额定频率f=50 Hz, 绝缘等级F, 定子铁心外径Do=430 mm, 定子铁心长度L=216 mm, 定子槽数θ1=48, 气隙G=1.2 mm, 磁极极靴宽度bp=90 mm, 磁极极身宽度bm=52 mm, 磁轭内径Dir=155 mm。试验样机如图4, 5所示。
《图5》

Fig.5 Novel variable speed constant frequency doubly fed salient pole synchronous machines
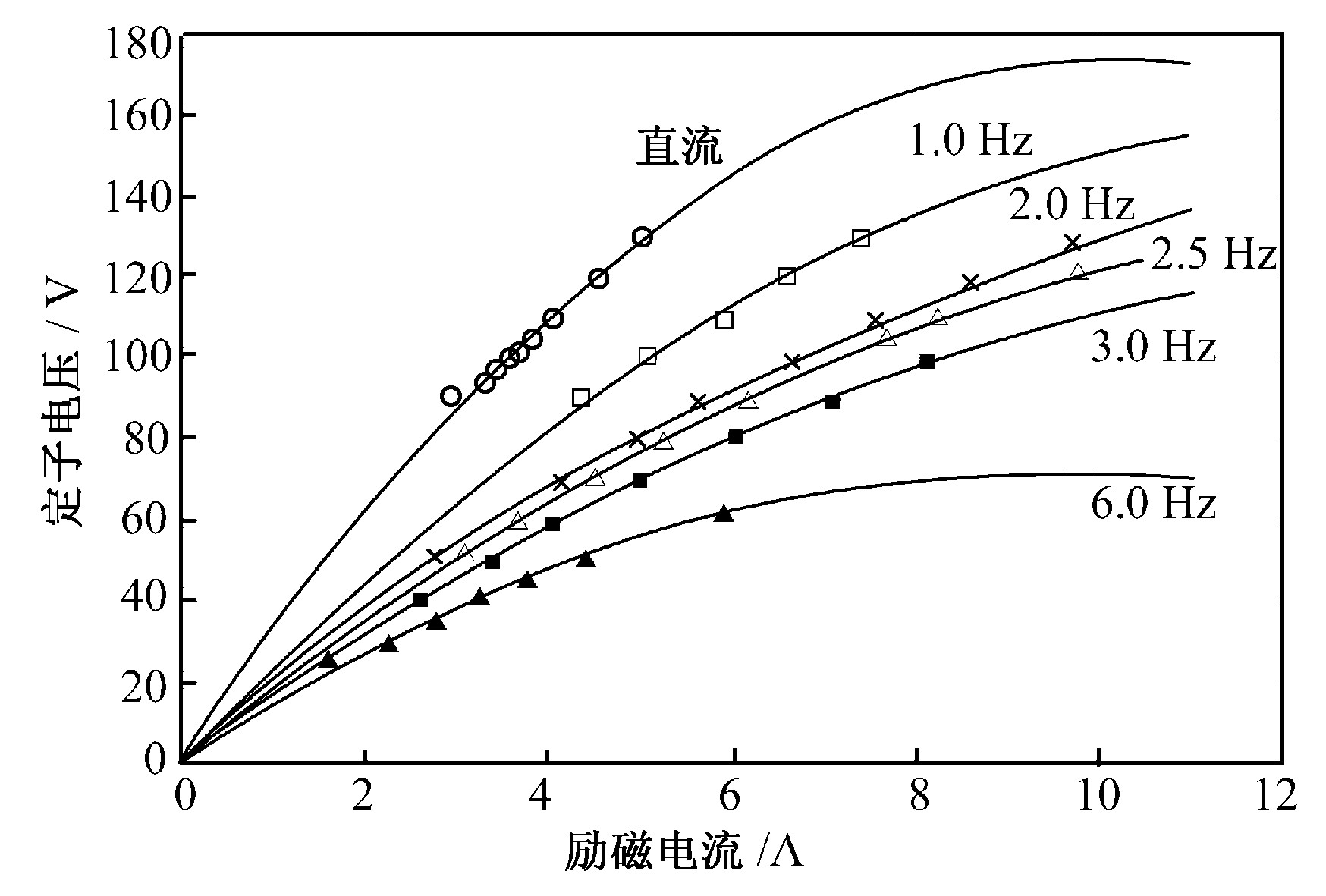
样机试验, 得到一系列的特性和波形。空载试验得到一族曲线, U=f (ff, if) , (图6) 。
式中ff (ωf) 为交流励磁电源的频率。
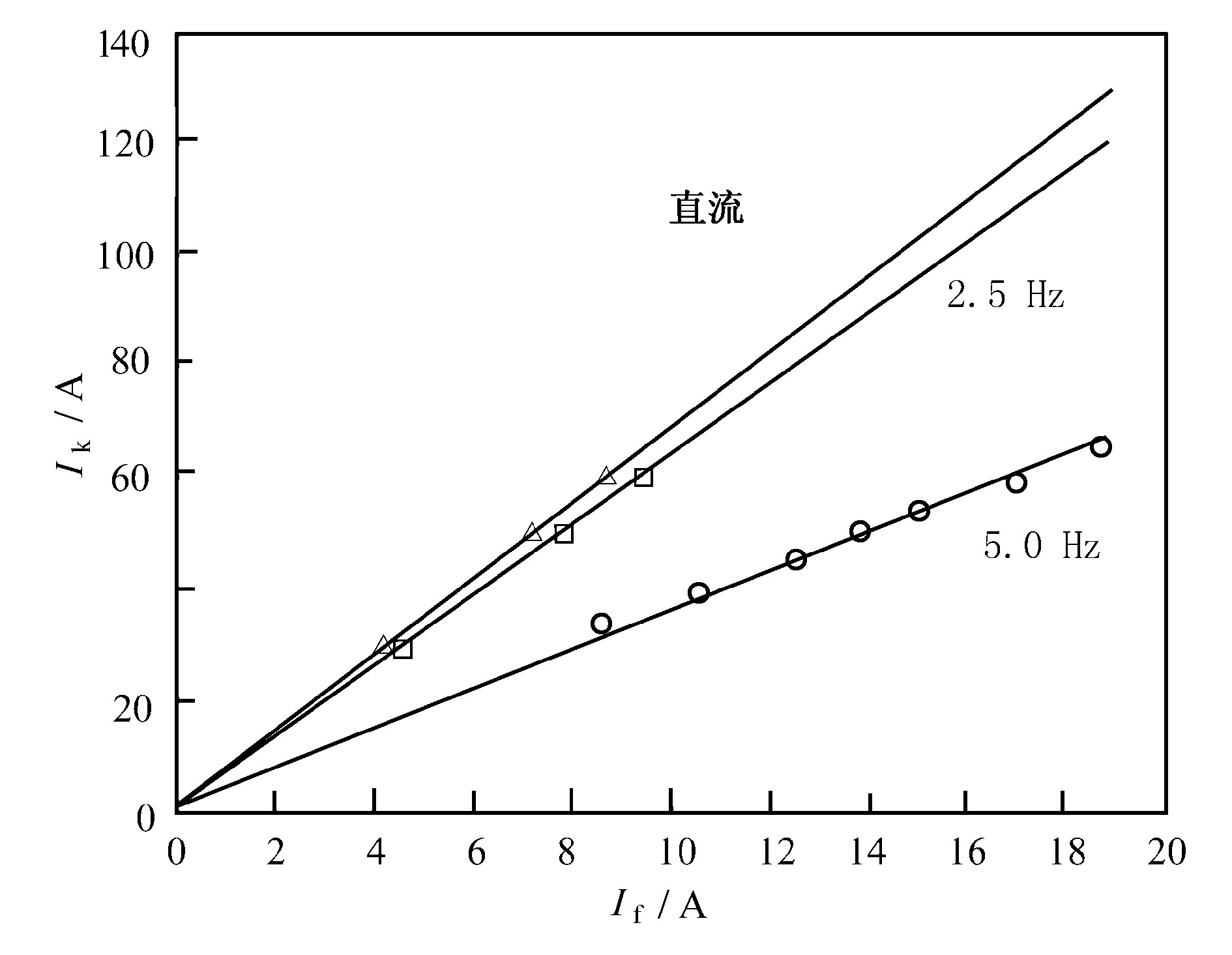
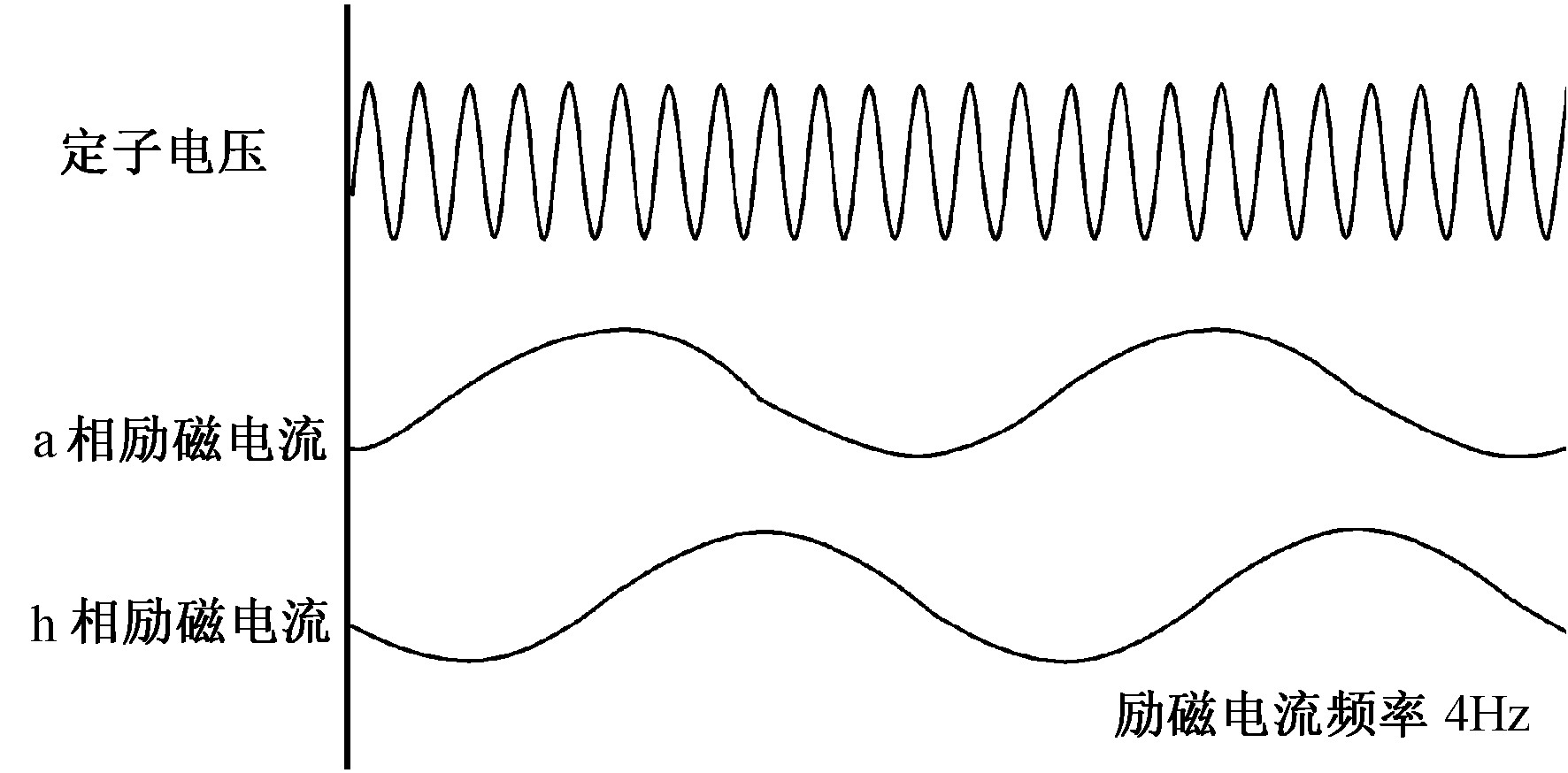
短路试验得到一族曲线, IK=F (ff, if) , 如图7所示。发电机并网前的空载电压波形曲线如图8所示。并网后加负载时, 发电机的电压和电流波形曲线如图9所示。
从试验中可以看出, 当改变转子交流励磁电源频率ff (ωf) 时, 相应地改变转子的转速ωr, 保持ωs=ωr±ωf不变。从而实现变速恒频的原理。
《5 结论》
5 结论
通过理论分析和样机试验验证, 作者提出的双馈变速凸极同步电机, 原理正确、新颖, 结构简单、可行, 具有创新性、实用性和自主知识产权, 应用前景广阔, 必将带来一定的经济效益和社会影响。











 京公网安备 11010502051620号
京公网安备 11010502051620号




