
《1 前言》
1 前言
中国高速铁路的蓬勃发展,不仅给世界带来了一个惊喜,高铁走出去战略的实施,也带动了世界高速铁路的发展。高速铁路的发展,给动力学研究带来了新的课题和挑战。为了设计高速动车组的动力学性能,优化高速列车与线路、受电弓与接触网之间的匹配关系,掌握气流作用对高速列车运行及其弓网接触受流等扰动影响。2007年原铁道部制订《时速300~350公里高速动车组总体技术方案》[1] 时(1公里=1 km),在本文作者的倡议下,把“发展和应用高速列车耦合大系统动力学理论”作为高速动车组的创新要点,通过国家支撑计划项目“中国高速列车关键技术研究及装备研制”课题一“共性基础及系统集成技术”的实施,这一创新要点取得很好的进展,形成了《高速列车耦合大系统理论与实践》一书。本文将介绍其理论部分的工作。
《2 高速列车耦合大系统动力学建模》
2 高速列车耦合大系统动力学建模
高速列车耦合大系统动力学是以高速列车为核心,把高速列车以及与之相关并影响其动力学性能的线路、气流、供电和接触网等耦合系统作为一个统一的大系统,研究高速列车动力学行为,以实现全局仿真、优化和控制的科学。因此,高速列车耦合大系统基本的子系统包括车辆系统、线路系统、弓网系统、供电系统以及影响列车动力学性能的气流。不同系统的响应是相互影响、相互关联的,而两两之间存在着特有的耦合关系,其中包含了传统的列车内部的车间耦合关系、车线之间的轮轨耦合关系、受电弓与接触网之间的弓网耦合关系、供电系统与列车之间的机电耦合关系、列车与环境(气流)之间的流固耦合关系,见图1。
《图 1 》
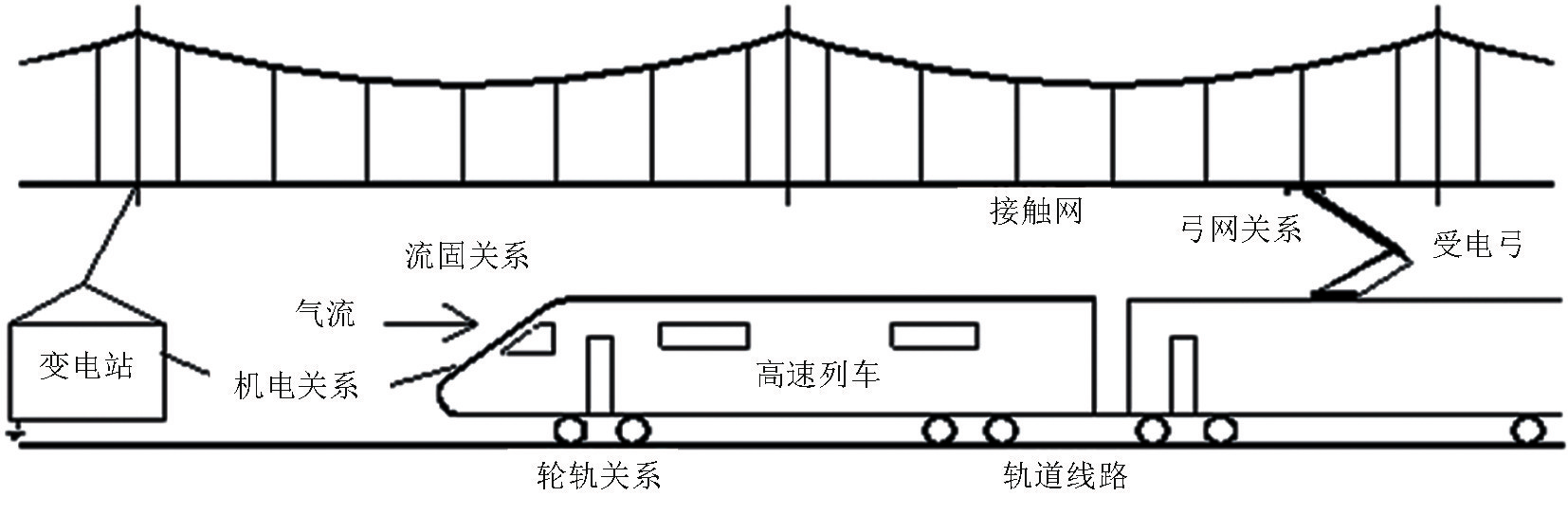
图 1 高速列车耦合大系统
Fig. 1 The coupled systems in high-speed train
图2 是更加具体化的高速列车耦合大系统动力学关系图。首先是列车,列车由动车或者拖车编组而成,每节车是基本单元,即传统车辆系统动力学研究的对象,在列车中需要考虑车与车之间的耦合作用力。受电弓安装在列车中某个车辆上,受电弓的底座随该车辆顶部的运动而运动,受电弓与接触网之间,通过受电弓顶部的滑板与接触网下部的接触线实现滑动接触,实现弓网相互作用力和电的耦合和传动。列车与线路是通过轮轨相互作用来实现力的传递。线路有钢轨、无砟轨道板和路堤或高架桥等组成部分,它们之间也将通过力的传递建立耦合关系。最后是气流,高速气流作用到列车上,不仅影响到列车运动姿态,也会影响弓网系统的振动。可以看到,除了机电耦合,其他系统都是直接用力耦合形成大系统动力学。而机电耦合,通过电能和机械能的相互转换,用电机的扭矩来驱动(或制动)车轮,最终在轮轨接触点上产生牵引力(或制动力),使得列车加速、减速或者恒速运行。
《图2》
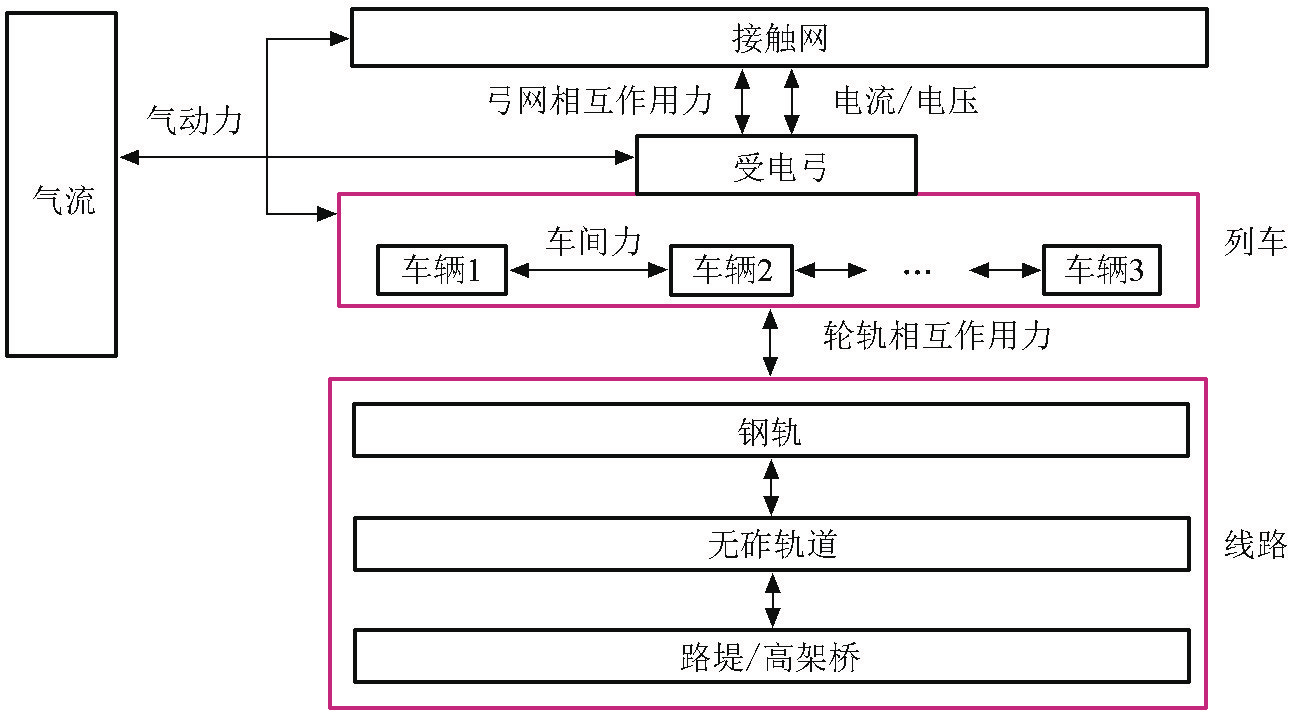
图2 高速列车耦合大系统动力学模型
Fig. 2 Dynamics model for coupled systems in high-speed train
基于子结构方法,分别建立车辆系统、轨道系统、弓网系统、气流、供电系统和牵引传动系统的系统模型,再建立基于列车动力学的车间、弓网、轮轨、机电和流固等耦合模型,最终形成高速列车耦合大系统动力学模型,具体的介绍见笔者的专著 [2] 。
《2.1 车辆系统刚柔耦合建模》
2.1 车辆系统刚柔耦合建模
车辆系统动力学建模采用多体系统动力学建模方法,而车辆系统与一般多体系统的主要区别之一就是车辆系统沿特定轨道运动,因此发展出基于轨道坐标系车辆系统建模方法 [3] ,如图3所示。假设整个车辆系统定义在同一个绝对坐标系(全局惯性坐标系)OXYZ中,引入一个轨道坐标系O tX tY tZ t ,该坐标系X轴与曲线相切指向车辆前进方向,Z轴垂直于水平面向上,Y 轴垂直XOZ 平面向左,轨道坐标系跟随车辆系统一起沿轨道中心线运动,轨道坐标系的坐标原点用轨道弧长s 唯一确定。每个运动体(刚体或柔性体)拥有一个体坐标系,假设图中车体i,其体坐标系为O iX iY iZ i ,车体i在全局惯性坐标系中的位置用其体坐标系原点的位置矢量  表示,假设车体上任意一点P 在其体坐标系中的位置矢量为
表示,假设车体上任意一点P 在其体坐标系中的位置矢量为 ,在绝对坐标系下该矢量为
,在绝对坐标系下该矢量为 ,考虑在轨道坐标系中的惯性体的弹性变形,体坐标系相对全局惯性坐标系的方位矩阵为
,考虑在轨道坐标系中的惯性体的弹性变形,体坐标系相对全局惯性坐标系的方位矩阵为  ,车体上P 的位置矢量可以表示为:
,车体上P 的位置矢量可以表示为:

式(1)中, 为车体在轨道坐标系中的位置矢量, = 为轨道坐标系在总体坐标中的位置矢量;
为轨道坐标系在总体坐标中的位置矢量; 为轨道坐标系相对总体坐标系的变换矩阵,采用欧拉角坐标系描述;ψ(s),θ(s),ϕ(s)分别为轨道的摇头角、点头角和侧滚角,当s 确定时
为轨道坐标系相对总体坐标系的变换矩阵,采用欧拉角坐标系描述;ψ(s),θ(s),ϕ(s)分别为轨道的摇头角、点头角和侧滚角,当s 确定时 和
和 为已知量。
为已知量。
 为P点在柔性体上的初始位置;
为P点在柔性体上的初始位置; 为P 点的弹性变形,用模态叠加法可以表示为:
为P 点的弹性变形,用模态叠加法可以表示为:

式(2)中, 为平动自由度模态集合;
为平动自由度模态集合; 为模态坐标矢量。
为模态坐标矢量。
则P 点的速度可以表示为:

令

《图3》
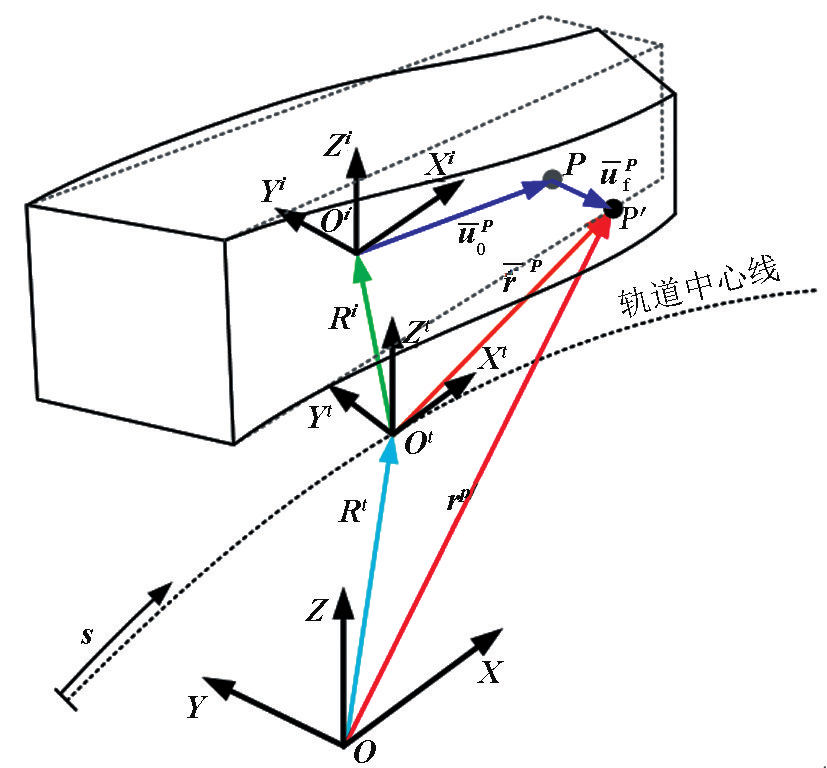
图3 柔性体描述
Fig. 3 Flexible body description
令 ,
, ,则:
,则:

柔性体i 的广义坐标包括模态坐标,即:

则公式(3)可以简化为:

其中与刚体相比,L 中的 不是常数,包含了初始位置和弹性变形量。
不是常数,包含了初始位置和弹性变形量。
采用多刚体同样的推导方式可得到弹性体质量矩阵:
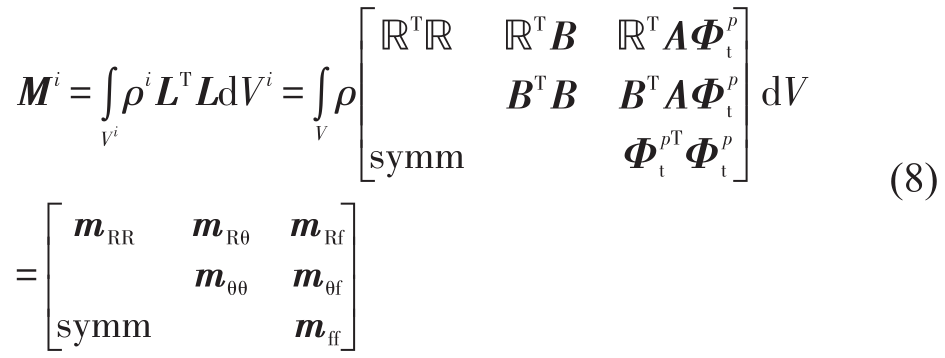
式(8)中, m RR 为柔性体平动惯量; m Rθ 为平动与转动的惯性耦合项; m Rf 为平动与变形的惯性耦合项;m θθ 为转动惯性张量; m θf 为转动与变形的惯性耦合项; m ff 为体弹性变形的惯性。
与刚体相比,除了存在广义外力外,柔性体还存在结构变形弹性力和阻尼力,阻尼矩阵 D 和刚度矩阵 K 可表示为:
式(10)中, 为柔性体第i 阶固有频率;
为柔性体第i 阶固有频率; 为等效粘性阻尼比。车体i 的广义惯性力为:
为等效粘性阻尼比。车体i 的广义惯性力为:

考虑到约束,车体的刚柔耦合方程可以写成:

式(12)中, λ 为拉格朗日乘子; Qv 为与速度二次项相关的广义惯性力; Qe 为一般力元广义外力;Qwr 为轮轨力广义力; Cp 为约束方程雅克比矩阵; 为约束方程,包含了欧拉参数的约束条件。对于整个车辆系统可以分别建立每个惯性体的动力学方程,采用矩阵组装的方式形成整个车辆系统的微分代数方程组,车辆系统刚柔耦合动力学方程与式(12)形式相同。
为约束方程,包含了欧拉参数的约束条件。对于整个车辆系统可以分别建立每个惯性体的动力学方程,采用矩阵组装的方式形成整个车辆系统的微分代数方程组,车辆系统刚柔耦合动力学方程与式(12)形式相同。
与位移模态叠加法类似,采用应力和应变模态进行叠加,可计算出结构的应力和应变。假设结构属于线性小变形,在进行有限元模态分析时同时计算出各阶振型对应的应力和应变,这些应力和应变结果称为应力模态和应变模态。根据有限元应力和应变计算公式可以得到下式内容:

式(13)、式(14)中, B 为应变矩阵; Ε 为弹性矩阵;Φε 和 Φσ 分别为应变和应力模态与位移模态相似。
《2.2 高速无砟轨道建模》
2.2 高速无砟轨道建模
采用无砟轨道是高速铁路发展趋势,传统的有砟轨道建模方法日趋成熟[4] ,无砟轨道也有学者进行研究 [5] 。由于高速铁路无砟轨道分在路堤段和高架桥路段,建模方法也有所不同,这里以高架桥路段模型为例。
桥梁段无碴轨道模型中,轨道被视为由钢轨,扣件系统,轨道板,CA砂浆层以及桥梁组成。其中,左右钢轨被视为连续弹性离散点支撑基础上的Timoshenko 梁,并考虑钢轨的垂向、横向和扭转振动,轨道板用三维实体有限元单元模拟,钢轨扣件和CA砂浆层用周期性离散的粘弹性单元代替,桥梁采用梁单元模拟。考虑地震的桥梁段无砟轨道系统模型如图4所示 [5,6] 。
《图4》
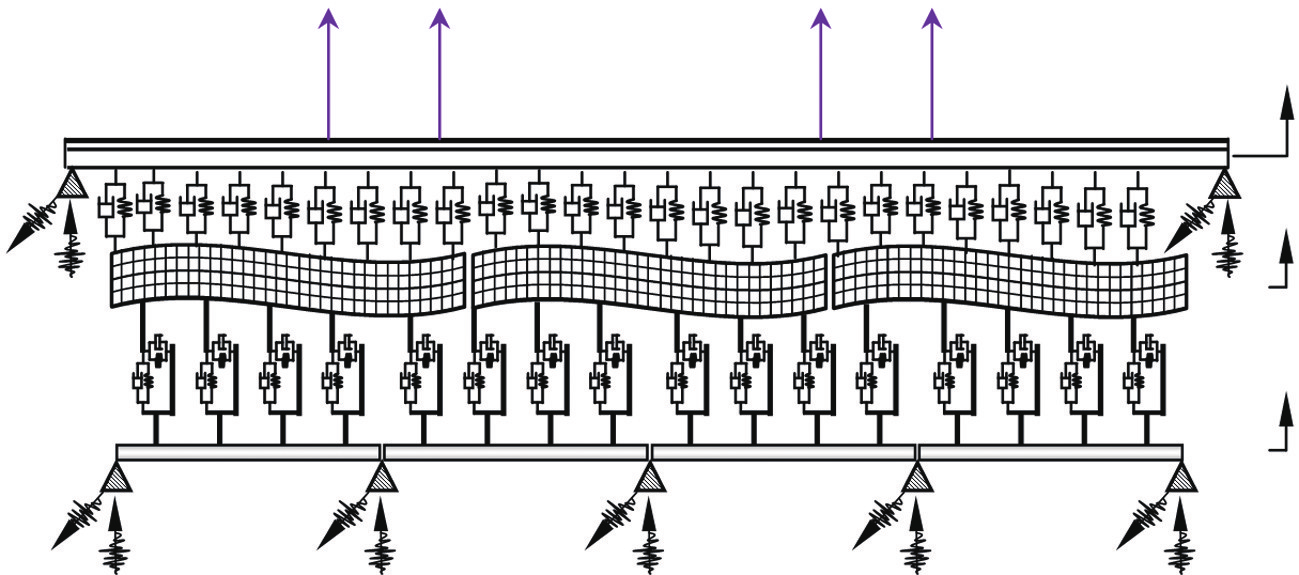
图4 高架桥段无碴轨道动力学模型
Fig. 4 The dynamic model of slab track on embankment elevation
为简化计算,假设Timoshenko梁支座两端及其中间轨下支撑处的地震激励是一致的,则地震作用下钢轨的运动方程可简化,利用模态叠加法,模态广义坐标下的钢轨运动二阶常微分方程为:
钢轨横向运动方程

钢轨垂向运动方程

钢轨扭转运动方程

式(15)~式(17)中, 分别为钢轨的横向、垂向和扭转正则坐标;
分别为钢轨的横向、垂向和扭转正则坐标; 分别为钢轨横向和垂向振动时,钢轨截面转角的正则坐标;ρ为钢轨的单位长度密度;m为钢轨单位长度质量;E 为钢轨弹性模量;G 为钢轨剪切模量;GK 为钢轨抗扭转刚度;A为钢轨截面面积;Iy 和Iz 分别为钢轨截面对y、z 轴的惯性矩;I0 为钢轨截面的极惯性矩; κy 和κz 分别为钢轨横、垂向截面的剪切因子;
分别为钢轨横向和垂向振动时,钢轨截面转角的正则坐标;ρ为钢轨的单位长度密度;m为钢轨单位长度质量;E 为钢轨弹性模量;G 为钢轨剪切模量;GK 为钢轨抗扭转刚度;A为钢轨截面面积;Iy 和Iz 分别为钢轨截面对y、z 轴的惯性矩;I0 为钢轨截面的极惯性矩; κy 和κz 分别为钢轨横、垂向截面的剪切因子; 和
和  分别对应钢轨横向、垂向和扭转的正则振型函数;下标
分别对应钢轨横向、垂向和扭转的正则振型函数;下标 为钢轨的第阶模态,NMY、NMZ、NMT为钢轨横向、垂向和扭转振动在数值计算中考虑的模态阶数;
为钢轨的第阶模态,NMY、NMZ、NMT为钢轨横向、垂向和扭转振动在数值计算中考虑的模态阶数; 为钢轨的计算长度;
为钢轨的计算长度; 和
和 分别为第i 支点垂向、横向支反力;
分别为第i 支点垂向、横向支反力; 和
和 分别为第j 位车轮作用于钢轨的垂向、横向荷载;Msi 和MGj 分别为第i 支点处钢轨支反力矩和第j位车轮作用于钢轨的力矩;
分别为第j 位车轮作用于钢轨的垂向、横向荷载;Msi 和MGj 分别为第i 支点处钢轨支反力矩和第j位车轮作用于钢轨的力矩; 和
和 分别为轨下支承的垂向、横向反力;
分别为轨下支承的垂向、横向反力; 分别为作用在钢轨两端和各轨下支撑地基处的地震波横、垂向位移激励。
分别为作用在钢轨两端和各轨下支撑地基处的地震波横、垂向位移激励。
轨道板采用有限元方法进行建模,CA砂浆层被视为平面连续的弹簧阻尼系统。轨道板在全局坐标下的运动方程可表示为:

式(18)中, 分别为轨道板的质量、阻尼、刚度矩阵;下标i为钢轨下轨道板的标号轨道板总个数 N slab ;
分别为轨道板的质量、阻尼、刚度矩阵;下标i为钢轨下轨道板的标号轨道板总个数 N slab ; 为第
为第 轨道板的位移列阵;
轨道板的位移列阵; 和
和 分别为钢轨对轨道板的作用力和地基与轨道板之间作用力列阵。
分别为钢轨对轨道板的作用力和地基与轨道板之间作用力列阵。

式(19)、式(20)中,K p 、C p 和 K CAM 、C CAM 分别为钢轨扣件系统和CA砂浆层的刚度和阻尼; 为第轨道板下的地震激励位移列阵。
为第轨道板下的地震激励位移列阵。
对于桥梁结构的建模,可以采用数值方法(有限元)和解析法进行。采用三维实体建模方法,只需按照桥梁结构(包括桥面和桥墩)的实际尺寸、材料属性和结构特性,用有限元法建模即可,这里不再介绍。对解析法,可采用Euler-Bernoulli梁来模拟桥梁的弯曲振动,轨道板对桥梁的作用通过轨道板支座反力以均布力的形式施加在桥梁上。
基于连续梁正则振型的正交性,采用模态叠加法将桥梁的四阶偏微分方程整理为关于正则振型坐标的二阶常微分方程:
横向
垂向

式(21)~(23)中, 分别为桥梁的横向、垂向和扭转正则坐标;mb 为桥梁单位长度质量;ρb 为桥梁材料的密度;lb 为桥梁长度;Eb 为桥梁弹性模量;Ab 为钢轨截面面积;GbKb 为桥梁结构的抗扭转刚度;Iby 和Ibz 分别为桥梁截面对y、z 轴的惯性矩;Ib0 为桥梁截面的极惯性矩。Yg (t )、Zg (t )分别为作用在桥梁支座处的地震波横、垂向位移激励;py (x,t )、pz (x,t )和Mb (x,t )分别为轨道板通过CA砂浆作用于桥梁的垂向 、横向和扭转力矩均布荷载 ,其中 py (x,t )、pz (x,t )可表示为:
分别为桥梁的横向、垂向和扭转正则坐标;mb 为桥梁单位长度质量;ρb 为桥梁材料的密度;lb 为桥梁长度;Eb 为桥梁弹性模量;Ab 为钢轨截面面积;GbKb 为桥梁结构的抗扭转刚度;Iby 和Ibz 分别为桥梁截面对y、z 轴的惯性矩;Ib0 为桥梁截面的极惯性矩。Yg (t )、Zg (t )分别为作用在桥梁支座处的地震波横、垂向位移激励;py (x,t )、pz (x,t )和Mb (x,t )分别为轨道板通过CA砂浆作用于桥梁的垂向 、横向和扭转力矩均布荷载 ,其中 py (x,t )、pz (x,t )可表示为:

式(24)、式(25)中,k yCAM 、k zCAM 、c yCAM 、c zCAM 分别为CA砂浆层的横向、垂向均布的刚度和阻尼;Ys (x,t )、Zs (x,t )分别为作用在桥梁支座下方路基的横向和垂向位移;而yb (x,t )、zb (x,t )分别为作用在桥梁支的横向和垂向位移;·为对运动变量求导。
联合求解公式(15)~(25),即可得到桥梁段无砟轨道系统的动态响应。
《2.3 受电弓模型》
2.3 受电弓模型
受电弓的动力学模型已经发展很多,包括:多刚体模型、归算质量模型、刚柔混合模型以及全柔性体模型等,如图5所示。
《图5》
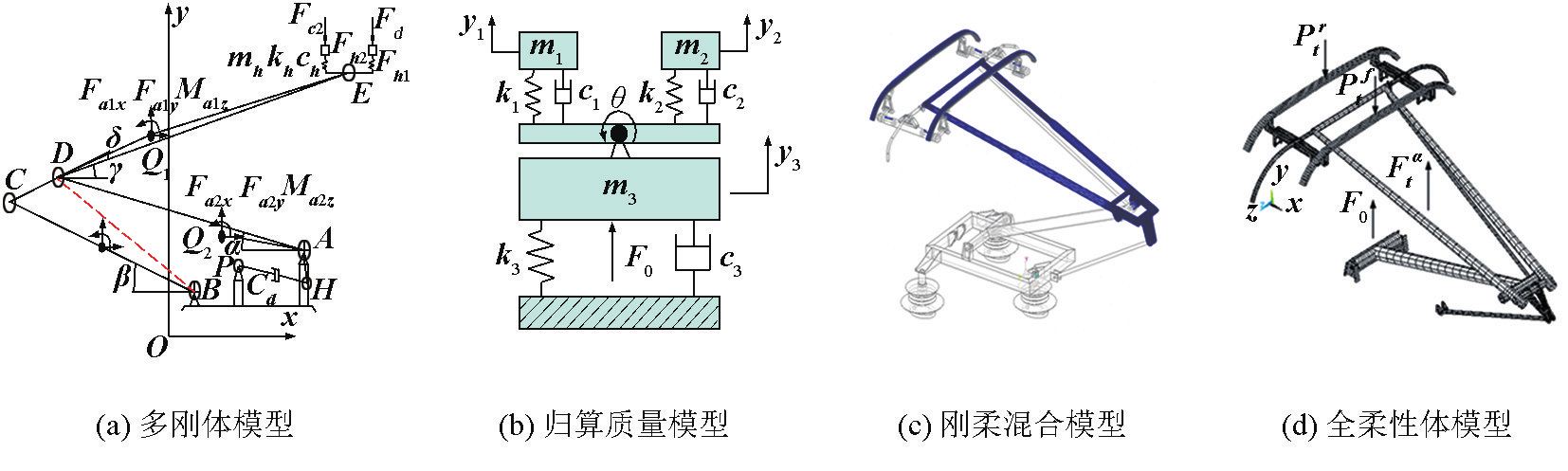
图5 受电弓模型
Fig. 5 Pantograph model
尽管受电弓已经发展到了可以采用全柔性全空间模型,但是传统受电弓归算质量模型也较为常用,如图5(b)所示。对于多刚体受电弓模型 [7] ,根据受电弓空气动力学仿真计算得到的气动阻力和升力,按照受电弓气动抬升力计算方法,计算得到前后滑板的气动抬升力Fa1 和Fa2 ,由此,弓头前后滑板的运动微分方程可写为:

式(26)、式(27)中, 分别为前(后)滑板质量、前滑板垂向加速度、后滑板垂向加速度;Fc1 、Fc2 分别为前、后滑板与接触网间的接触压力;F h1 、Fh2 分别为前、后滑板的弹簧力,有如下的表达形式:
分别为前(后)滑板质量、前滑板垂向加速度、后滑板垂向加速度;Fc1 、Fc2 分别为前、后滑板与接触网间的接触压力;F h1 、Fh2 分别为前、后滑板的弹簧力,有如下的表达形式:
式(28)、式(29)中,kh 、ch 分别为弓头与框架间刚度、阻尼;ld 为前、后滑板距离之半;θh 为平衡臂与水平间夹角。
为了简化框架非线性运动微分方程,得到框架的归算参数,需在某一工作高度对框架部分的运动方程进行线性化 [8] ,线性化后的框架部分的运动微分方程,如下式:

式(30)中,F0 为静态接触压力。式(26)~式(30)就是传统的受电弓三质量块模型。为了进一步考虑受电弓框架中上臂杆的弹性变形,将受电弓框架部分等效为两个集中质量块,如图6所示,质量块m3 的运动微分方程(30)只需将右端置为零,而m4 的运动微分方程,可写成如下的形式。

随着受电弓运行速度的不断提升,弓网相互作用引起的高频振动成分不断增加,以及强气流引发的流致振动的影响,使得受电弓弓头滑板以及框架臂杆等关键部件的柔性变形日益显著。为此,建立起刚柔混合,甚至全柔性受电弓模型是最近受电弓建模的方向。刚柔混合和全柔性受电弓建模方法这里不再介绍,详见文献 [9]。
《图6》

图6 四质量块模型
Fig. 6 Four lumped mass model
《2.4 接触网建模》
2.4 接触网建模
笔者曾采用Fourier展开和模态技术进行接触网建模的方法 [10,11] ,也是当今应用较多的一种建模方法,图 7是简单链型接触网的计算模型,由承力索、接触线、吊弦、支柱和限位器组成。由于这一模型已经诞生多年,已为他人所熟悉,不再介绍。
由于采用模态叠加方法来获得接触网运动方程存在模态截断误差,为此,近十年多采用直接积分方法来研究弓网关系。直接建模方法即是通过解析或数值方法,定义接触网各部件在空间的几何位置、拓扑关系及受力状况,从而建立接触网的运动微分方程,得到其数学模型。
将接触网的接触导线假设为伯努利-欧拉梁,接触线的张力为Tc ,线密度为ρc ,抗弯刚度为EIc ,由此可建立接触线的运动微分方程为 [12] :

式(32)中,yc (x,t)为接触线的振动位移;kdi 为第i 根吊弦的刚度;ymi 为第i 根吊弦处承力索的振动位移;yci 为第i根吊弦处接触线的振动位移;xci 为第i根吊弦的x 方向坐标;第Fc 为弓网接触压力; v 为受电弓运行速度。
《图7》

图7 简单链型接触网模型
Fig. 7 Model of simple catenary
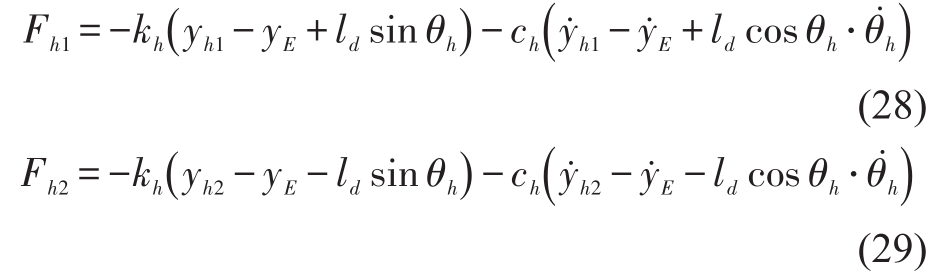
类似的,将接触网的承力索假设为伯努利-欧拉梁,承力索的张力为Tm ,线密度为ρm ,抗弯刚度为EIm 。这里考虑高架线路、列车和弓网耦合的模型见图8。
《图8》
图8 高架桥上弓网系统动力学模型
Fig. 8 Dynamic model of pantograph-catenary in viaduct
考虑桥梁振动引发的接触网支柱振动的影响时,假设接触网支柱为刚性体,ys 为桥梁的振动位移,由此也可以建立承力索的运动微分方程为:
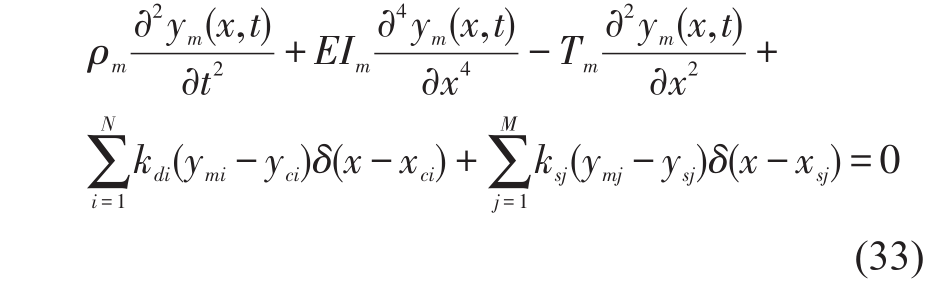
式(33)中,ksj 为第j 个承力索座的支撑刚度;ymj 为第j 个承力索座处承力索的振动位移;ysj 为桥梁振动引起的第j 个承力索座的位移;xsj 为第j 个承力索座的x 方向坐标。
另外,风对接触网振动影响很大,但式(32)和式(33)仅是接触网垂向振动方程,无法考虑风的影响,但可以采用有限元法建立三维接触网模型进行考虑,具体可在节点载荷向量加入风载荷,从而考虑风产生的气动影响。
就高速列车耦合大系统动力学而言,理论上还需考虑其牵引供电系统相对而言,牵引供电和传动系统的动态性能主要对列车的纵向动力学有较大影响,与车辆系统动力学的运动稳定性、运行平稳性和安全性关系度相对较小。因此,具体的状态方程推导略,详细内容可见文献[2]。
《2.5 耦合模型》
2.5 耦合模型
前面建立了车辆系统、线路、弓网等子系统的运动微分方程,接下来就要建立各子系统的耦合关系,形成高速列车耦合大系统动力学模型。
1)车间耦合模型。高速列车的车端连接装置主要包括密接式车钩缓冲装置、车间减振器(如有)、内外风挡及空气、电气连接设备,而其中对列车动力学性能产生重要影响的有车钩缓冲装置、车间减振器及密接式风挡装置。采用的建模方法是力元建模方法,其中密接式车钩缓冲装置简化成弹簧-阻尼并联力元模型,风挡简化成一个万向-摩擦力元模型,车间减振器就直接用阻尼器模型,或者也可以考虑车间减振器两端的连接刚度,简化成弹簧-阻尼-弹簧串联力元模型。
2)轮轨耦合模型。轮轨接触在基于多体动力学的车辆系统模型中可以作为一种特殊的力元处理,但与一般力元相比,轮轨接触力元要复杂的多,这是车辆系统与一般多体系统的主要区别。
轮轨力主要分为轮轨接触法向力和轮轨蠕滑力,轮轨法向力的计算主要有约束反力法和非线性赫兹弹簧法,轮轨蠕滑力的计算有很多相对成熟的轮轨蠕滑理论,如Vermeulen-Johnson [13] 、Kalker 简化理论(FASTSIM) [14] 、沈氏理论 [15] 、Polach 非线性接触理论 [16] 和 Kalker 三维精确理论(CONTACT)[17]等。由于这里仅仅引用前人得到的结果,不再赘述。
3)弓网耦合模型。受电弓滑板和接触网的接触线是相对滑动接触。目前的弓网动力学研究一般不考虑空间运动,仅仅考虑垂向振动的点接触模型,笔者在文献 [9]提出了要考虑接触形貌的空间弓网接触。这时,弓网接触点的接触压力为Fc ,可采用传统的非线性接触刚度计算方法;而弓网接触点的摩擦力 Fμ 为摩擦系数乘接触压力,此时,接触线对受电弓滑板的作用力为:
式(34)中, 分别是受电弓滑板和接触线在接触点处沿接触点法向的相对位移和在切平面的相对运动速度;kc 和μcv 分别是接触点处的接触刚度和摩擦系数。
分别是受电弓滑板和接触线在接触点处沿接触点法向的相对位移和在切平面的相对运动速度;kc 和μcv 分别是接触点处的接触刚度和摩擦系数。
4)流固耦合模型。高速列车与普速列车最大不同就是受气流的影响,因此,高速列车均采用流线型设计。高速列车运行时,气流作用包括阻力、升力和侧向力(或力矩)。鉴于流固耦合计算的复杂性,在流固耦合计算时大体采用两种不同的耦合计算模式:离线耦合仿真和在线联合仿真。
离线耦合仿真方法是传统的列车空气动力学计算方法,仅仅适用于对计算精度要求不高的空旷条件下稳态气流作用时的列车空气动力学计算。将列车运行姿态变化甚至车体等变形造成的气动力变化,实时地反映在高速列车动力学计算中,实现真正的流固耦合计算,是会车、隧道通过和脉动风作用等动态过程仿真的唯一选择。结合列车动力学方程和流体控制方程,高速列车联合仿真的表达式如下 [19] :

式(35)中, ρ 为流体密度;t 为时间变量;v 为速度矢量;grad为梯度算子; Γ 为扩散系数;S 为源项; φ 为流场变量;ρ为气流密度;V为该有限控制体的体积;A为该控制体的表面面积;n 为控制体表面外法向方向矢量;P 为列车刚柔耦合系统动力学计算中的车体表面节点映射到流体计算中的车体表面节点的对应函数;气动力(矩)  为关于流场变量 φ 的积分函数H。
为关于流场变量 φ 的积分函数H。
《2.6 高速列车耦合大系统动力学建模》
2.6 高速列车耦合大系统动力学建模
有了高速列车各子系统的数学模型以及耦合关系的模型,就构建成了高速列车(耦合)大系统动力学模型。图9是以高速列车为核心,考虑线路系统、供电系统、弓网系统以及气流等子系统的模型框图,通过车车、轮轨、弓网、流固和机电耦合形成高速列车耦合大系统动力学模型。在大系统动力学模型中,体现了多体、多态耦合的复杂性,但由于采用了考虑耦合关系的子结构方式,这不仅使得建模时可以依托不同专业进行建模,更重要的是在仿真计算时,可以根据耦合和研究的需要,灵活实现不同子系统之间的耦合。
《图9》

图9 高速列车耦合大系统动力学建模
Fig. 9 Dynamics model for coupled system of high-speed train
《3 高速列车耦合大系统动力学耦合仿真方法》
3 高速列车耦合大系统动力学耦合仿真方法
有了数学模型就可以编程,形成仿真软件。但是,仿真计算除了模型,还需要计算方法的支撑,特别是高速列车耦合大系统动力学,不仅要处理多体、多态的复杂系统,还要考虑耦合大系统和运行仿真所带来的庞大的计算和储存量问题,同时还要处理由于车车耦合、车线耦合和流固耦合等带来的耦合计算问题。下面先针对车车耦合、车线耦合和流固耦合,先介绍一些特殊的计算处理方法。
《3.1 车车耦合计算方法》
3.1 车车耦合计算方法
传统的列车动力学建模和积分方法,是把全列车的各自由度运动微分方程全部写出,组成整列车自由度的庞大矩阵进行同步计算,此方法存在建模复杂且工作量大,解题规模大的弊端。根据列车仅由几种类型的机车车辆组成的情况,如图10所示,笔者在文献[6,18]中提出了循环变量方法,把一节车看成一个基本的积分单元,这样新的积分方法不像传统的积分方法那样,需要在每一个时间步长一次计算出列车系统中所有变量的运动状态,而是,先计算第一节车,再计算第二节车,这样一节车、一节车逐个进行计算,直到计算出尾车的运动状态,再进入下个积分步长。在新的积分计算方法中,由于式(9)和变量被重复使用,因此,新的积分方法可称之为循环变量法;由于在积分中从第一节车开始计算,后面车的计算用到前面已算出的新运动状态,达到递推的效果,所以也称递推积分方法。
《图10》

图10 列车编组
Fig. 10 Train formation
《3.2 考虑车线耦合的长大复合结构线路计算方法》
3.2 考虑车线耦合的长大复合结构线路计算方法
高速列车耦合大系统动力学仿真,需要模拟移动的列车在线路系统上运行,这就要求系统模型中有足够长的线路模型,这样不仅导致计算精度低,而且计算工作量大。实际上,由于振动的衰减,当列车在线路上运行时,只有接近列车前后区域的轨道参与振动,就可以采用笔者在文献[6]提出的滑移窗口建模和计算,仅仅把参与车线耦合振动的线路模型放到系统里计算,线路模型随着车的运行而移动,实现计算模型窗口的滑移。
图11是高架无砟轨道线路考虑车线耦合的滑移窗口计算模型,由于桥梁、轨道板、枕木的离散和边界条件的不统一,导致表示桥梁、轨道板和钢轨的窗口不统一,而且依次覆盖(见图11),其中桥墩以铰支座为窗口边界、轨道板以轨道板边缘为窗口边界、轨道以枕木为窗口边界分别划定各自计算窗口,显然,这些计算窗口在滑移时是跳跃前进的,而且被覆盖的窗口不能跃出覆盖窗口,这就要求钢轨滑移窗口的长度确定不仅仅要考虑到振动的衰减,还要考虑桥梁和轨道板窗口跳跃前进不跃出窗口。
《图11》
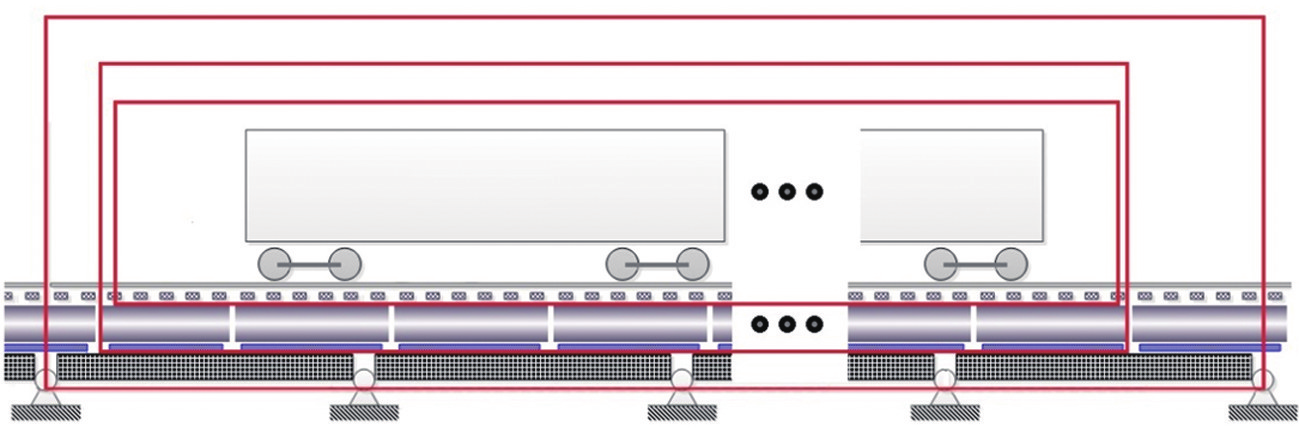
图11 滑移窗口示意图
Fig. 11 Sliding window
对于桥梁和轨道板,可对窗口内的每一个桥梁或者轨道板进行完整建模,并假设滑进或者滑出的桥梁或者轨道板的振动为零,因此,滑移计算没有问题。由于高速铁路钢轨采用的是无缝钢轨,没有边界,因此钢轨的窗口是人为设置的简支梁。图12中,滑移窗口内的钢轨为AB,滑移到下个窗口为A′B′,这时在两个窗口的共同区域(虚线框内),里面钢轨的振动位移一定是相同的。应用模态叠加法, 分别是滑移前后两个窗口的钢轨模态和模态变量,这时的AB和A′B′窗口内的振动位移
分别是滑移前后两个窗口的钢轨模态和模态变量,这时的AB和A′B′窗口内的振动位移 可表达为:
可表达为:

《图12》

图12 钢轨的滑移窗口
Fig. 12 Sliding window of rail
由于两个窗口共同区的振动必须一致(共同区外的振动视为零),设考虑计算的钢轨模态为nz 阶,滑移前窗口AB为t0 时刻,窗口AB在共同区的位移已知,xk 取nz 个点。由于滑移后A′B′窗口在共同区的位移一致,就有:

从而得到滑移后A′B′钢轨在t0 时刻的振动模态q′ rzk (t ),这样就实现了窗口AB和窗口A′B′ 的滑移。
《3.3 基于松弛因子的高速列车流固耦合联合仿真计算方法》
3.3 基于松弛因子的高速列车流固耦合联合仿真计算方法
高速列车流固耦合动力学中存在一个关键问题:列车空气动力学和列车系统动力学之间迭代的耗散问题。为了尽可能降低列车空气动力学和列车系统动力学之间迭代的耗散,研究团队提出了一种基于松弛因子的高速列车流固耦合联合仿真方法 [19] ,如图 13所示。基于松弛因子的高速列车流固耦合联合仿真方法的关键之处在于:第i+1时刻(即第i+1个耦合迭代步)空气动力学求解器传递给车辆系统动力学求解器的气动力不是第i时刻的气动力,而是由第i时刻以及第i–1时刻等的气动力信息预测校正而得到。
《图 13》

图 13 基于松弛因子的高速列车流固耦合联合仿真
Fig. 13 Fluid-structure co-simulation method with a relaxation factor
假设第i–1时刻和第i时刻列车空气动力学求解器计算得到的列车气动力分别为 和
和 ,并且列车空气动力学求解的时间迭代步长为 Δt ,那么第i 时刻的列车气动力的一阶导数近似可以表述如下:
,并且列车空气动力学求解的时间迭代步长为 Δt ,那么第i 时刻的列车气动力的一阶导数近似可以表述如下:

由于时间迭代步长 Δt 量级比较小,故预测第i+1时刻的列车气动力近似为

通过引入松弛因子λ 对第i +1时刻的列车气动力进行修正,则第i+1时刻空气动力学求解器传递给车辆系统动力学求解器的气动力 表达式为:
表达式为:

当 λ =0时,第i +1时刻空气动力学求解器传递给车辆系统动力学求解器的气动力为 ,即是传统的流固联合仿真方法。
研究结果表明 [19] :当松弛因子 λ 选取0.5时,列车空气动力学和列车系统动力学之间迭代的耗散最小,这样既保证计算精度,也提高了计算效率。
有了高速列车耦合大系统动力学模型和特殊的计算方法,就可以构成高速列车耦合大系统仿真平台,实现列车在无限长度线路上的运行模拟。
《4 结语》
4 结语
本文提出进行高速列车耦合大系统动力学理论,考虑列车与线路、受电弓、接触网、牵引供电系统以及气流等对高速列车运行的影响。在高速列车不断提高速度的今天,考虑系统耦合的精确建模与仿真是十分必要的,也是传统的车辆系统动力学理论的发展。高速列车耦合大系统动力学,不仅仅是简单的系统增大,而且系统变得很复杂,要考虑多体、多态,而且也不再是单纯的动力学这样的力学问题,而是有了应力、电、甚至热的问题。因此,高速列车耦合大系统动力学理论是研究的广义动力学问题,它的提出,不仅仅是研究方法进步,更是车辆系统动力学学科的发展。笔者相信,这一理论会在高速铁路的发展中,特别是高速列车的性能提升和安全保障方面,将发挥越来越重要的作用。











 京公网安备 11010502051620号
京公网安备 11010502051620号




