

《1 前言》
1 前言
三峡升船机是永久通航设施,运行工况复杂,其技术水平和研究难度超过目前世界上已建和在建的许多通航升船机。升船机 50.00~196.00 m 高程为船厢室段塔柱承重结构。三峡升船机塔柱为薄壁型墙体结构,受自重、温度、风力等因素影响,结构易产生变形,而变形对塔柱混凝土浇筑及附属其上的螺母柱、齿条等设备安装精度有影响。为保证塔柱混凝土浇筑及螺母柱、齿条等设备的安装精度,本文对几种典型变形监测方法进行了精度分析,根据实际工程需求,选择全站仪极坐标法作为筒体变形监测方法,本文以3#筒体观测结果为例,对塔柱施工期变形情况进行了分析,由此得出的变形规律可用于指导相关工程的施工和修正设计工作。
《2 变形监测控制要素》
2 变形监测控制要素
《2.1 主要内容》
2.1 主要内容
监测过程中,除记录监测时间、风力、风向、环境温度等外部因素外,还需要计算得到监测点的高程、平面坐标以及纵、横向水平位移和垂直位移等内部因素[1,2] 。
《2.2 精度指标》
2.2 精度指标
根据文献[3]规定的变形监测精度指标,监测点观测平面的点位中误差和高程中误差均为±3 mm。
《2.3 观测周期》
2.3 观测周期
监测点的观测周期[4] 为每天一次,根据当天施工的不同情况,可以对观测时间段作适当调整。塔柱浇筑完成高程以下的监测点,根据其监测得到的变形规律可以适当减少观测次数,直至塔柱浇筑到达封顶高程。塔柱封顶后观测周期改为每月观测一次,直至塔柱竣工。在汛期、蓄水期以及监测数据出现异常时,需适当增加观测次数。
《3 变形监测方法研究》
3 变形监测方法研究
《3.1 典型变形监测方法的精度分析》
3.1 典型变形监测方法的精度分析
塔柱变形监测需要在4个筒体的不同高程面上布设监测点,由于受施工条件的约束,不可能在每一个高程面上布设交通通道,故监测点一旦埋设好后,监测人员无法再直接接触监测点,这样势必会限制监测方法的选择。依据现实条件,能够选择实施的监测方法有全站仪极坐标法、测角前方交会法、边角交会法。
1)全站仪极坐标法是将全站仪架设在一已知点上,后视另一已知点,对监测点进行水平角测量、垂直角测量和斜边测量,计算得到监测点高程以及平面坐标。采用TCA2003全站仪(测角误差为0.5″,测距误差为1 mm+1 mm/km×D)进行水平角β、垂直角α 以及边长观测,以最长斜距离 200 m(平距为 185 m,对应垂直角为22.1°)和最短斜距离50 m(平距为40 m,对应垂直角为37°)计算,仪器直接接高,考虑接高读数误差和对中误差为±0.5 mm,则最远监测点高程中误差为 ±1.18 mm,点位中误差为±1.64 mm;最近监测点高程中误差为±0.66 mm,点位中误差为±1.50 mm。
2)测角前方交会法是将全站仪首先架设在一个已知点上,后视另一已知点,测量该点与监测点的夹角β1以及垂直角α1;再架设在另一已知点,后视前一已知点,测量该点与监测点夹角β2和垂直角α2。利用测量得到的两已知点与监测点的夹角关系以及两已知点之间的距离可以分别计算出两已知点到监测点的距离;通过监测得到的距离和垂直角计算两已知点高程,取其平均值作为最终高程;通过监测得到的距离和夹角计算得到监测点平面坐标。采用TCA2003全站仪进行观测时,假定按照最高精度考虑,则取两已知点到监测点的最长斜距离均为 200 m(平距为 185 m,对应垂直角为22.1°),最短距离均以60 m计算,仪器直接接高,则计算得到(β1+β2 )=163°、β1=β2= 81.5°,考虑接高读数误差和对中误差为±0.5 mm,则高程中误差为±2.6 mm,点位中误差为±4.7 mm。
3)边角交会法是将全站仪极坐标法与测角前方交会法相结合的方法,即将全站仪首先架设在一个已知点上,后视另一已知点,测量该点与监测点的夹角β1、垂直角α1和斜边 ;再架设在另一已知点,后视前一已知点,测量该点与监测点夹角β2、垂直角α2和斜边 b;利用观测结果计算出监测点的高程和平面坐标。同时可计算出两组监测点的三维空间坐标,取其平均值作为最终监测成果值。高程精度与平面点位精度的计算与全站仪极坐标法一致,点位中误差和高程中误差在全站仪极坐标法的基础上提高了
;再架设在另一已知点,后视前一已知点,测量该点与监测点夹角β2、垂直角α2和斜边 b;利用观测结果计算出监测点的高程和平面坐标。同时可计算出两组监测点的三维空间坐标,取其平均值作为最终监测成果值。高程精度与平面点位精度的计算与全站仪极坐标法一致,点位中误差和高程中误差在全站仪极坐标法的基础上提高了 倍。
倍。
《3.2 筒体变形监测方法的选择》
3.2 筒体变形监测方法的选择
筒体变形监测点的平面点位精度和高程精度均必须控制在±3 mm以内。从精度上分析,全站仪极坐标法和边角交会法两种方法均是可行的。由于边角交会法要从两个不同的方向去测量同一个监测点,因此采用边角交会法监测时必须采用360° 反射棱镜。下面对 360°反射棱镜进行二次验证试验。
试验一:首先将360°反射棱镜安置在已知其坐标的某一固定标墩上,然后分别架设全站仪在多个其他已知坐标的固定标墩上,从不同的方向测量它们之间的距离,最后将测量结果与根据坐标计算得到的结果作比较。试验结果表明,采用360°反射棱镜进行监测时,不同方向测量得到的结果的差值均不一致,最大差值达到4 mm。
试验二:首先将360°反射棱镜安置在已知其坐标的某固定标墩上,然后架设全站仪在另一个已知坐标的某一固定标墩上,转动360°反射棱镜到不同的角度方向,测量两个标墩之间的距离。试验结果表明,转动360°反射棱镜到不同的角度方向测得的两个标墩之间的距离均有差别,最大差值也达到4 mm。
由上述试验结果可知,采用360°反射棱镜进行监测测量时,由于其同心度不一致,无法满足筒体变形监测的要求,故采用边角交会法进行监测是不可行的。
全站仪极坐标法采用的是单方向观测方法,只需采用固定单反射棱镜,不必考虑单反射棱镜的加工误差,因而最终选择了全站仪极坐标法作为筒体变形监测方法。
《4 变形监测实施》
4 变形监测实施
《4.1 监测点布设》
4.1 监测点布设
在进行监测的过程中,将水平位移监测点和垂直位移监测点布设为同一监测点,目的是反映在施工过程中塔柱结构的稳定性。在塔柱84.00 m高程面以下,每10 m布设一组监测点,分布在塔柱的内侧;在塔柱84.00 m高程面以上,每5 m布设一组监测点,分布在塔柱的外侧;每组监测点由3条断面点组成,塔柱左右侧各布置3个监测点。
《4.2 监测点观测》
4.2 监测点观测
1)高程监测。塔柱84.00 m高程以下监测点的高程采用Leica TCA2003高精度全站仪测量,即将高精度全站仪任意架设在50.00 m高程面上,通过调整水准仪,利用局部控制网点监测全站仪基准视线高,通过测量得到的垂直角和斜边长计算得到监测点的高程。塔柱84.00 m高程以上监测点的高程采用高精度全站仪测量,即将高精度全站仪架设在与监测点高程面高程相近的马道上,利用周边专用施工控制网点监测全站仪高程基准视线高,通过多测回测量得到的垂直角和斜边长计算得到监测点的高程。
2)平面监测。将Leica TCA2003高精度全站仪置于某一工作基点上,根据全站仪极坐标法原理,先对准另一工作基点作为后视,然后依靠马达驱动仪器,利用安装在仪器内的机载软件,自动识别并精确照准目标,按全圆方向法自动观测角度和边长,并实时存入PC(personal computer)卡中,同时记录下测量时的干温、湿温和气压,直到完成全部测量工作。
机载软件程序在观测过程中能自动判别归零差、2C互差、指标差、同一方向各测回互差、测距测回互差等测量数据是否超限。若超限则程序自动重测各超限方向,直到测量得到的数据符合精度要求为止。
《4.3 监测数据处理》
4.3 监测数据处理
及时检查监测数据的质量,及时了解施工期建筑物的变形情况,现场监测数据采集完后,对监测数据进行如下处理。
1)将全站仪 PC 卡上所存的各种数据传入电脑,对外业观测成果进行检查;
2)对边长加乘常数进行修正,同时对气象元素进行修正,利用垂直角和修正后的边长计算监测点高程;
3)利用计算得到的高程进行距离改平,通过改平后的距离以及观测水平角计算监测点的平面坐标;
4)将计算得到的监测点平面坐标换算成相对于监测点首次观测得到的平面坐标值的水平位移量和垂直位移量;
5)根据得到的相对水平位移量以及相对垂直位移量绘制相应的位移量变化过程线。
《5 监测成果与分析》
5 监测成果与分析
《5.1 塔柱变形监测基本情况》
5.1 塔柱变形监测基本情况
塔柱变形监测从2010年5月开始进行,监测点的埋设位置分布在1、2、3、4#筒体以及7号轴上,监测高程为60.00~195.00 m,监测周期为每天观测一次。由于受施工影响,个别监测点未能实现连续观测。其中2011年2月后,84.00 m高程以下监测点由于受齿条、螺母柱二期埋件施工影响,所有监测点被遮挡或毁坏,无法进行后续监测。84.00 m高程以下监测点共监测了180次,从其监测成果分析,在综合考虑到低温季节、高温季节,有风、无风,以及塔柱是否处于浇筑上升期等因素的情况下,塔柱上下游及左右岸的累计位移量都在2 mm以内。由文献 [3]可知,变形监测的精度指标为监测点平面点位中误差在±3 mm 以内,故可认为 84.00 m 高程以下塔柱纵、横方向没有发生水平位移。高程受温度高低影响而变化,温度高,高程上升;反之,高程下降。同时分布在高高程的监测点比低高程的监测点高程变化量大,高高程的监测点在月平均最低温度与月平均最高温度的高程变化达到5 mm左右。2011年2 月后重点监测塔柱95.00 m高程以上的监测点。
《5.2 监测点成果》
5.2 监测点成果
三峡升船机为高薄壁型塔柱结构,主要受温度及自重影响,发生的变形大。95.00 m高程以上各监测点是从2011年1月开始观测,180.00 m高程以上监测点因施工部位于 2012 年 9 月才形成而导致监测时间短,没有经过低高温监测时段,无法进行成果分析,同时考虑监测点太多,故本次以3#筒体为例,按照高程分布从上到下选择180.00 m高程以下部分监测点参与进行成果初步分析。
塔柱3#筒体95.00~175.00 m高程部位各监测点 2013年3月之前的变形曲线如图1~图4所示。其中 X 方向、Y 方向、H 方向的符号含义如下:X 方向,“+”表示向下游位移,“-”表示向上游位移;Y 方向,“+”表示向左岸位移,“-”表示向右岸位移;H 方向:“+”表示向下下沉位移量,“-”表示向上上升位移量。
《图1》

图1 3#筒体95.00 m高程以上监测点月平均温度与时间关系曲线图
Fig.1 The relationship of monitoring points monthly average temperature and time of 3 # cylinder above 95.00 m elevation
《图2》

图2 3#筒体95.00 m高程以上监测点X 方向月平均累计位移量与时间关系曲线图
Fig.2 The relationship of monitoring points Xdirection monthly average cumulative displacement and time of 3 # cylinder above 95.00 m elevation
《图3》
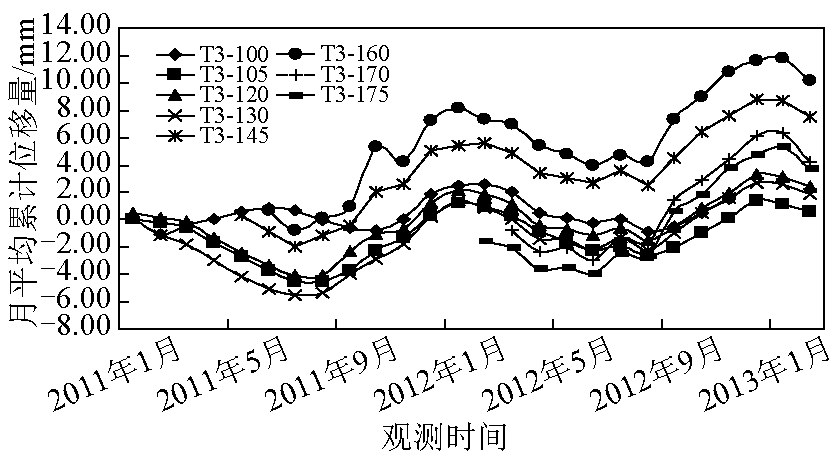
图3 3#筒体95.00 m高程以上监测点Y 方向月平均累计位移量与时间关系曲线图
Fig.3 The relationship of monitoring points Y-direction monthly average cumulative displacement and time of 3 # cylinder above 95.00 m elevation
《图4》
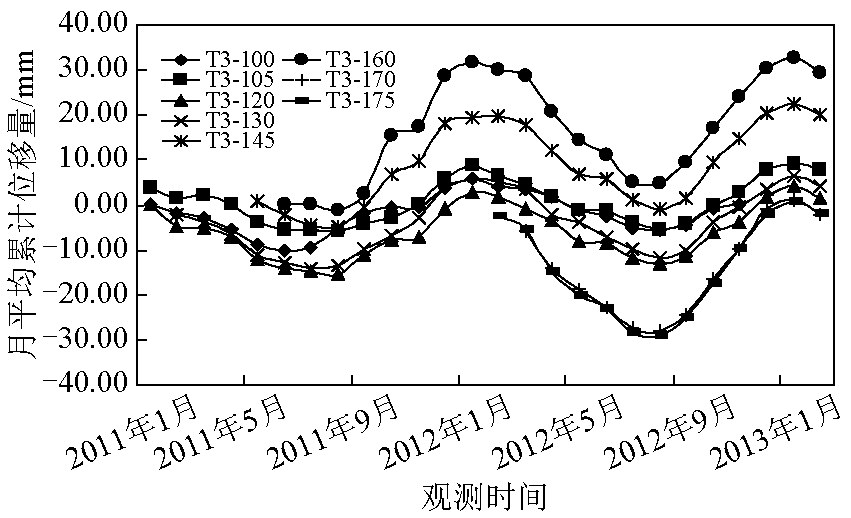
图4 3# 筒体95.00 m高程以上监测点H 方向月平均累计位移量与时间关系曲线图
Fig.4 The relationship of monitoring points H -direction monthly average cumulative displacement and time of 3 # cylinder above 95.00 m elevation
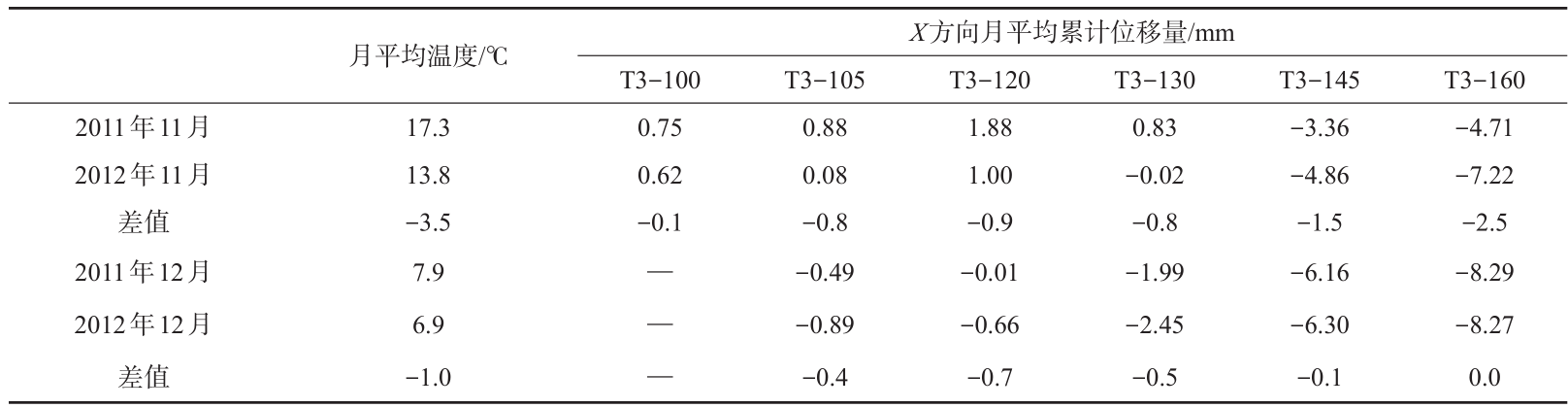
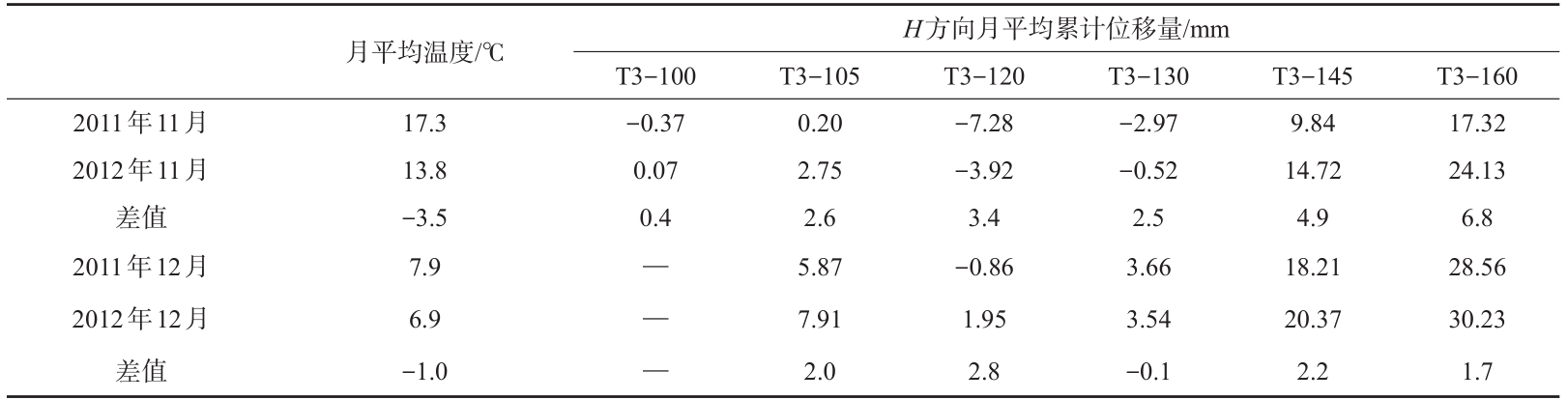
通过不同观测年份同一月份月平均累计位移量和同一观测年份最高温和最低温月份月平均累计位移量进行比较,获得的成果如表1~表6所示。
《表1》
表1 3#筒体不同年份同一月份X方向月平均累计位移量差值表
Table 1 The X-direction monthly average cumulative displacement difference table of the same month in different years for 3 # cylinder
《表2》
表2 3#筒体不同年份同一月份Y 方向月平均累计位移量差值表
Table 2 The Y-direction monthly average cumulative displacement difference table of the same month in different years for 3 # cylinder

《表3》
表3 3#筒体不同年份同一月份H 方向月平均累计位移量差值表
Table 3 The H-direction monthly average cumulative displacement difference table of the same month in different years for 3 # cylinder
《表4》
表4 3#筒体同一年份最高温和最低温月份X 方向月平均累计位移量差值表
Table 4 The X-direction monthly average displacement difference table on the months which have maximum and minimum temperatures in the same year for 3 # cylinder

《表5》
表5 3#筒体同一年份最高温和最低温月份Y 方向月平均累计位移量差值表
Table 5 The Y-direction monthly average displacement difference table on the months which have maximum and minimum temperatures in the same year for 3 # cylinder

《表6》
表6 3#筒体同一年份最高温和最低温月份H 方向月平均累计位移量差值表
Table 6 The H-direction monthly average displacement difference table on the months which have maximum and minimum temperatures in the same year for 3 # cylinder

《5.3 监测成果分析》
5.3 监测成果分析
由图1~图4和表1~表6可以得出如下变形监测结果分析结论。
1)筒体监测点 X、Y、H 三个方向的月平均累计位移量都随温度变化而变化,温度降低,X 方向月平均累计位移量增大,Y 方向月平均累计位移量减小, H 方向月平均累计位移量向正值方向增大;反之,温度升高,X 方向月平均累计位移量减小,Y 方向月平均累计位移量增大,H 方向月平均累计位移量向负值方向增大。
2)对于筒体,随着时间的推移,筒体不断升高,通过不同观测年份同一月份月平均累计位移量比较分析,总体来看:X 方向3#筒体往上游偏移,不同的高度偏移量不一样,高度越高偏移越大;Y 方向, 3#筒体都往船厢室侧偏移,不同的高度偏移量不一样,高度越高偏移越大;H方向,3#筒体都在下沉,不同的高度下沉量不一样,高度越高下沉越大。
3)对于筒体,随着时间的推移,筒体不断升高,通过同一观测年份最高温和最低温月份月平均累计位移量比较分析,年温差最大达到 24.6 ℃,其变形情况为:X、Y、H 方向不同高程的监测点高低温月平均累计位移量之差不一致,其改变趋势是高度越高差量越大,其最大差量一般出现在170.00~175.00 m 高程附近。
总之,筒体随温度变化而变化,温差大变形大,温差小或恒温状态时变形很小或没有变形,此变形情况符合建筑物变形规律。
《6 结语》
6 结语
三峡升船机为高薄壁型塔柱结构,主要受温度及自重影响,发生的变形大。本文通过对几种典型监测方法精度分析及 360°反射棱镜进行二次验证试验,最后决定采用全站仪极坐标法作为筒体变形监测方法。塔柱变形监测从2010年5月开始进行,利用测量得到的塔柱变形长期累积的观测数据,对塔柱外观形变进行了分析。观测成果和分析结果表明,变形情况符合建筑物变形规律,由此证明所采用的监测方法是切实可行的。本文所采用的变形监测方法能够为相关工程的施工和修正设计工作提供一定的参考借鉴。











 京公网安备 11010502051620号
京公网安备 11010502051620号




