



《1 前言》
1 前言
通过旋转机械振动信号分析, 可以有效地识别机器的运转状况, 判别机器的故障类型及损坏程度
常用的提高信噪比的方法有滤波、同步平均等。由于非平稳信号在频域表现为包含高阶谐波成分, 因此使用传统的频域滤波方法将造成严重的信号失真
经验模式分解 (empirical mode decomposition, EMD) 是一种较新的信号变换理论, 具有自适应的特性, 分解出的信号能够很好地反映系统的特征。笔者将经验模式分解引入机械振动信号的滤波处理中, 试图提高信号的信噪比, 突出有效信号, 以达到增强诊断可靠性的目的。
《2 基本理论及滤波性能分析》
2 基本理论及滤波性能分析
《2.1 经验模式分解 (EMD) 基本理论》
2.1 经验模式分解 (EMD) 基本理论
经验模式分解认为信号是由不同的波动成分和一个趋势组成的, 仿照Fourier级数分解的形式, 可以表示如下:
式中x (t) 为原信号, r为趋势项, aj (t) , wj (t) 分别为时变幅值和时变频率。从式 (1) 可以看出, 经验模式分解延伸了Fourier级数的概念, 基函数不再是正弦或余弦信号, 而被调幅、调频信号所取代。从这个意义上讲, Fourier级数可以视为经验模式分解的一个特例。
基于以上原因, 经验模式分解后的每一项 (除了趋势) 都被规定为一个本征模式函数 (intrinsic mode function, IMF) , IMF应满足以下条件:
1) 在整个数据序列内, 过零点和极值点的数目最多相差1;
2) 在该分量的任意点, 局部均值为零。
由以上两点可以看出, IMF是一个与时间轴对称的波动信号。经验模式分解的过程如下:
1) 确定原信号x (t) 的所有局部极值点, 利用三次样条函数求出信号的上、下包络线;
2) 记两条包络线的均值为μ1, 求出余项
3) 判断y1 (t) 是否满足IMF定义的条件, 若不满足, 视y1 (t) 为x (t) , 重复以上步骤, 直到y1 (t) 满足IMF的条件, y1 (t) 即为分解出的第一个分量。
4) 继续按上述步骤对x (t) - y1 (t) 进行分解, 直到剩余量为单调函数为止。
《2.2 经验模式分解的滤波性能分析》
2.2 经验模式分解的滤波性能分析
《2.2.1 EMD对加性噪声的滤除作用 设模拟信号为》
2.2.1 EMD对加性噪声的滤除作用 设模拟信号为
式中r是均值为零、正态分布的噪声, 单位为mm, r及式 (3) 的时域波形见图1。
下面应用EMD对式 (3) 进行分解, 其波形如图2所示。由图2看到, 模拟信号的正弦波基本上被正确分解出来 (IMF3) , 并且幅值接近1, 表明能量损失很小;白噪声也被逐级分解出来, 分别为分量IMF1, IMF2, IMF4, IMF5, 可以证明它们都是窄带高斯噪声
《2.2.2 利用EMD构造滤波器》
2.2.2 利用EMD构造滤波器
EMD可以将信号分解为一系列的本征模式函数, 这些函数依次分布在从高到低的不同频段。同时, 由于自适应的性质, 每个分量都代表了系统的不同物理特性, 各模式分量重新组合后的信号不会对原始信号所包含的信息造成扭曲。
假设信号x (t) 分解为IMF后表示为
其中i=1, 2, …, n, 表示原始信号被分解为n个本征模式函数, 则
高通滤波可表示为
其中i=1, 2, …, k, 表示抽取信号的前k个本征模式函数, 信号的高频成分被有效提取出来;
低通滤波可表示为
其中i=m+1, m+2, …, n, 表示抽取信号的后 (n-m) 个本征模式函数, 信号的低频成分被有效提取出来;
带通滤波可表示为
其中i=k+1, k+2, …, m, 表示抽取信号的中间 (m-k) 个本征模式函数, 这样信号的中间频率成分被有效提取出来。
由上述过程可以看到, 使用EMD进行滤波是在时域进行的, 同时, 由于分解过程的自适应性以及局部性, 利用EMD进行滤波最大限度地保证了信号的真实性和原始特性。对于不同的信号, 为了抽取合适的本征模式函数, 应根据系统的特性来选择;对于旋转机械而言, 分解出的每层IMF都代表了特定的振动模式, 因此, 可以选择包含重要信息的本征模式函数, 而剔除无用的模式
《3 经验模式分解的滤波仿真》
3 经验模式分解的滤波仿真
由于旋转机械物理结构的特殊性, 其振动信号往往包含正弦信号、调制信号、谐波信号和噪声等, 假设振动信号为
式中r为均匀分布的随机噪声, 有2个正弦信号、1个调幅信号和1个调相信号。时域波形见图3。
图4绘出了图3所示信号进行EMD的结果及各分量的幅值谱。可以看到, 2个正弦信号和2个调制信号都被分解出来, 但有少许误差。由幅值谱能够看到信号的频率成分按照由大到小的顺序被逐级排列;同时, 较好地保持了信号的原始特性。
在旋转机械振动信号分析中, 系统的不同部分将产生不同的信号成分。若感兴趣的频率成分是正弦和调相信号, 则可以使用EMD构造一个带通滤波器, 将IMF中的1, 5, 6去掉, 重构其他信号。图5是经过EMD滤波后信号的时域波形和幅值谱。对比滤波前后的频谱发现, 有用信号被正确分离出来, 且对信号的频谱几乎没有造成任何失真。在旋转机械故障诊断中, 也可以直接利用分解出的时域信号分量, 判断振动的严重程度, 进行决策。
《图5》

Fig.5 The simulative signal after filtering and amplitude spectrum of before/after filtering
《4 工业现场数据应用实例》
4 工业现场数据应用实例
以某企业氧压机轴向振动数据为例, 其时域波形及频谱如图6所示。由时域波形可以看到存在周期性的冲击, 造成信号频谱中出现高频谐波, 用传统的频域滤波法不能正确处理此信号。图7为应用EMD滤除高频谐波后得到的信号。可以看到, 信号中存在载波频率为850 Hz, 调制频率为212 Hz的调制成分。
《图6》
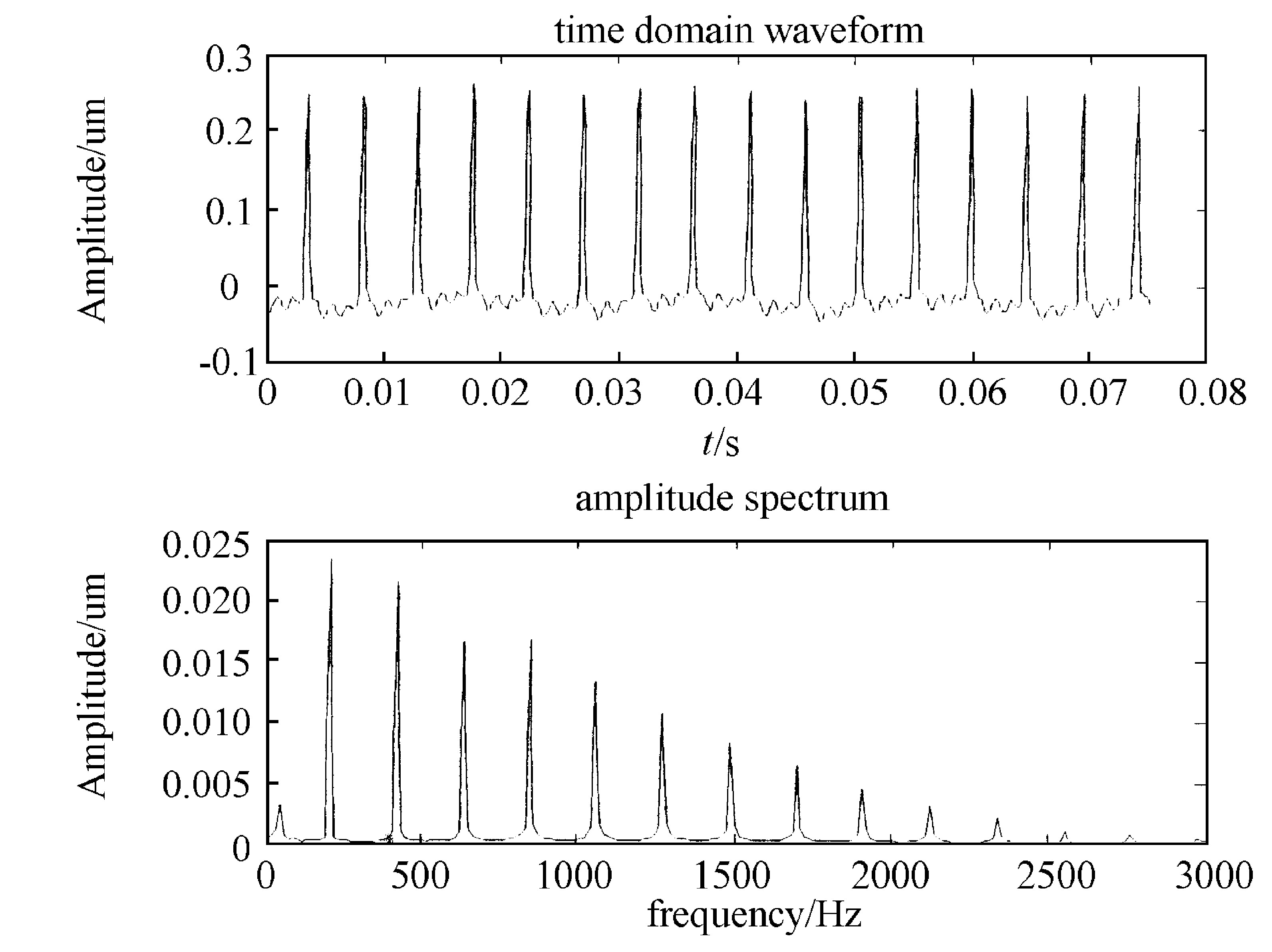
Fig.6 The time domain waveform of axial displacement sensor and amplitude spectrum
《图7》

Fig.7 The signal and its amplitude spectrum after filtering the high frequency harmonic
《5 结论》
5 结论
笔者分析了经验模式分解方法的去噪与滤波性能, 并将其应用于旋转机械振动信号分析中。仿真实验及真实数据验证表明, 使用经验模式分解进行降噪、滤波是可行的。
经验模式分解方法作为一种自适应的时域分解方法, 其滤波性质有别于传统频域滤波方法, 这表现在无法事先规定滤波的截止频率。事实上, 自适应性和自行定义的截止频率是一对矛盾, 如何有效地解决这个问题, 有待进一步研究。











 京公网安备 11010502051620号
京公网安备 11010502051620号




