







《1 前言》
1 前言
S. F. Konovalov
《2 设计》
2 设计
《2.1结构设计》
2.1结构设计
图1是利用旋转体自身角速度驱动的硅微机械陀螺的结构图, 其可通过各向异性刻蚀硅片来制作。4个电极和悬挂在弹性扭转梁上的硅摆片之间形成两对差动电容。坐标系oxyz固定在陀螺的硅摆上,
图3是微机械陀螺的硅摆结构, a0, a1, a2, a3是x方向尺寸, b1, b2, b3是y方向尺寸, h是质量块厚度。
《2.2动力学方程》
2.2动力学方程
这种硅微机械陀螺的运动方程为
式中 Jz, Jy, Jx是敏感质量块在ox, oy, oz轴上的转动惯量,
简化式 (1) 可得
其解为
式中A和δ是积分常数, 由运动的初始条件确定, B是稳定振动的振幅;β是相位差, 即角振动相位比驱动力落后的相位角;n=ξω0是阻尼因子。上式第一部分随振动时间增加而很快衰减;第二部分由受迫作用力决定, 它的频率为受迫力的激振频率, 其振动振幅不仅和激振力有关, 还和激振频率及振动系统的参数Jz, Jy, Jx, KT, D有关。方程的稳态解为
代入参数并化简可得
在方程式 (5) 中的频率只与
《3 制作》
3 制作
《3.1敏感结构制作》
3.1敏感结构制作
在双面抛光硅片表面生长一层二氧化硅, 接着涂覆光刻胶, 之后利用接触式紫外曝光进行双面光刻, 将图形转移到硅片上。
利用硅各向异性腐蚀技术, 采用湿法刻蚀方法, “掩膜-无掩膜”工艺, 在衬底上加工出硅摆结构。通过多次氧化、光刻与腐蚀后, 采用静电键合方法, 形成敏感结构。
硅摆制作工艺如图4所示。
1) 硅片清洗;
2) 第一次双面氧化, 见图4a;
3) 第一次双面光刻、腐蚀, 形成硅摆初步形状, 见图4b;
4) 第二次双面光刻、腐蚀, 形成梁和阻尼孔区, 见图4c;
5) 第二次双面氧化;
6) 第三次双面光刻、腐蚀, 见图4d;
7) 第四次双面光刻、腐蚀, 见图4e;
8) 去除氧化层, 见图4f;
9) 引线键合焊盘处溅射铜。
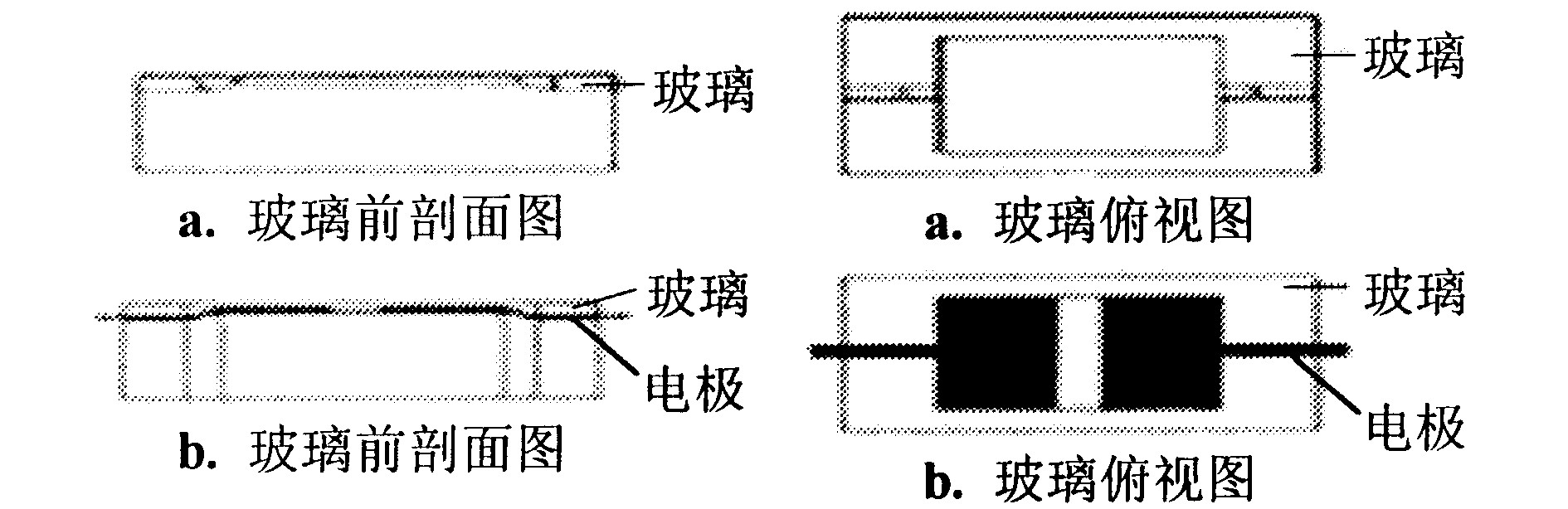
微晶玻璃电极板制作工艺如图5所示:
1) 分别将两片玻璃研磨形成槽, 见图5a;
2) 溅射铜2~3 μm, 见图5b。
《3.2硅摆的封装》
3.2硅摆的封装
用键合工艺对硅摆和微晶玻璃电极进行键合工艺封装, 然后用金属外壳进行密封封装。封装工艺如下:
1) 对硅摆和玻璃电极键合;
2) 将敏感元件粘接到金属底座上;
3) 连接导线;
4) 充氮气并用盖密封;
5) 检漏;
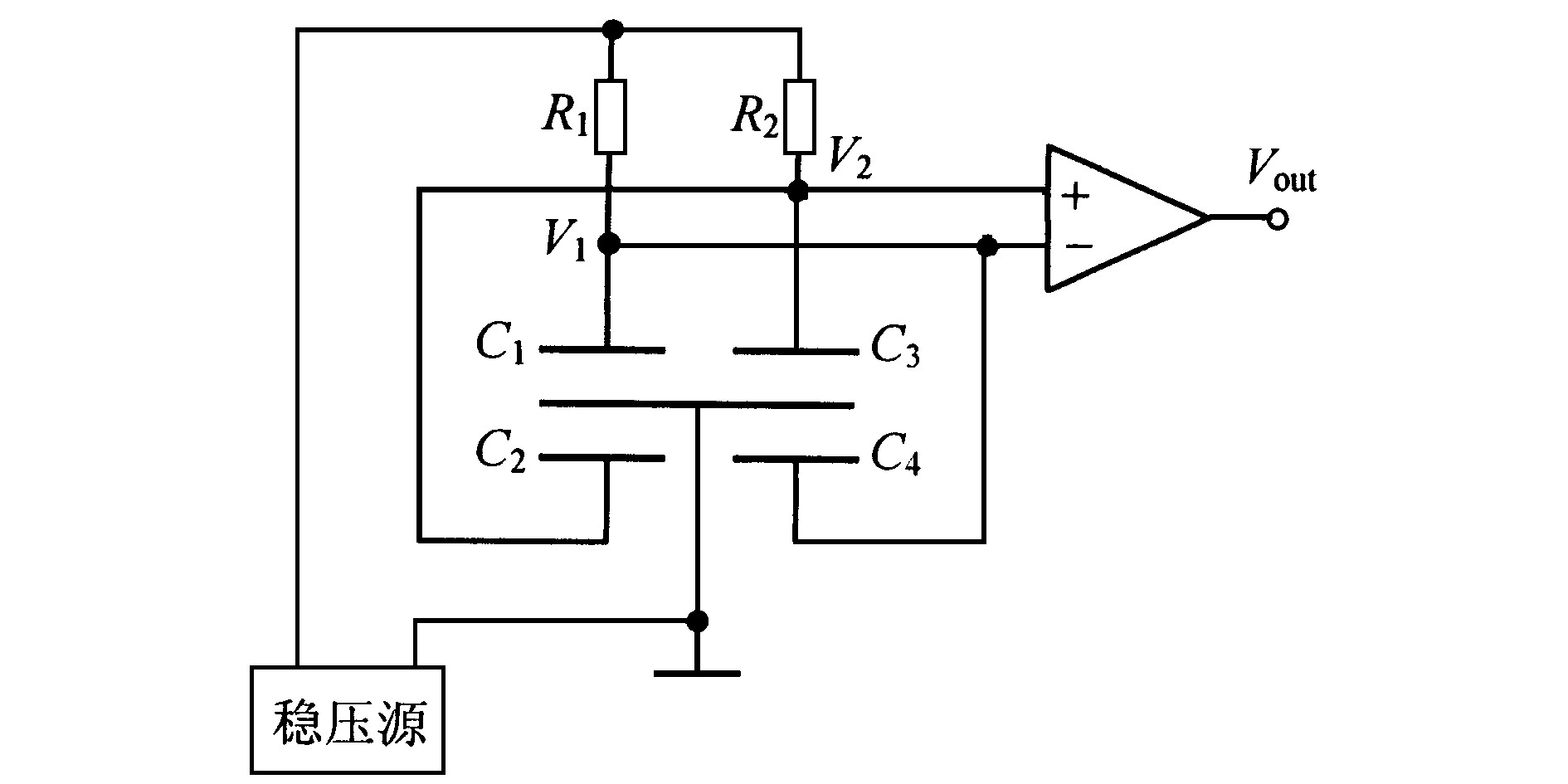
6) 测量静态电容。
对经过以上封装后敏感元件进行静态电容检测, 硅摆的静态电容值如表1所示。
Table 1 Capacitance of the device after packing silicon pendulum
《表1》
差动电容 |
C1 | C2 | C3 | C4 |
电容值/pF |
29.7 | 33.9 | 26.1 | 31.1 |
《4 模拟测试》
4 模拟测试
《4.1模态分析》
4.1模态分析
输入单晶硅结构尺寸和相应的材料常数, 赋给45号体单元。对支撑梁以hex, sweeping方式划分网格, 对振动质量以tet free方式划分网格, 在两支撑梁端面加全方位位移约束。经过求解和后处理, 得到3个模态, 第一模态的共振频率为197.34 Hz, 如图6所示, 第二、第三模态的频率分别为1 806 Hz和2 292 Hz, 可不予考虑。
《图6》

Fig.6 FEA analysis about module
Ansys 5.60, APR 20 2003 10∶50∶34, Nodal Solution, Step=1, Sub=1, Freq=197.33 Hz, Usum (AVG) , Rsys=0, PowerGraphics, Efacet=1, Avers=Mat, DMX=211.002, SMX=211.002
《4.2频响分析》
4.2频响分析
通过动力学参数计算可得
故式 (1) 可简化为
式 (7) 是标准的有阻尼的受迫振动方程。
选分析类型为频响分析 (harmonic response) , 求解方法为完全法 (Full) , 用Frontal求解器。载荷强制频率范围为10~50 Hz, 载荷幅度以Ramped方式变化, 载荷作用在振动质量的两边缘处形成力偶矩, 阻尼形式为恒定阻尼比[DMPRAT], 最后求解得到在输入角速度Ω=0.01 rad/s时的频响分析结果如图7所示。该频响分析曲线是硅振动质量-边缘节点的位移-频率 (载体旋转频率) 响应曲线。从图7中看出, 当
《5 性能检测》
5 性能检测
《5.1试验装置》
5.1试验装置
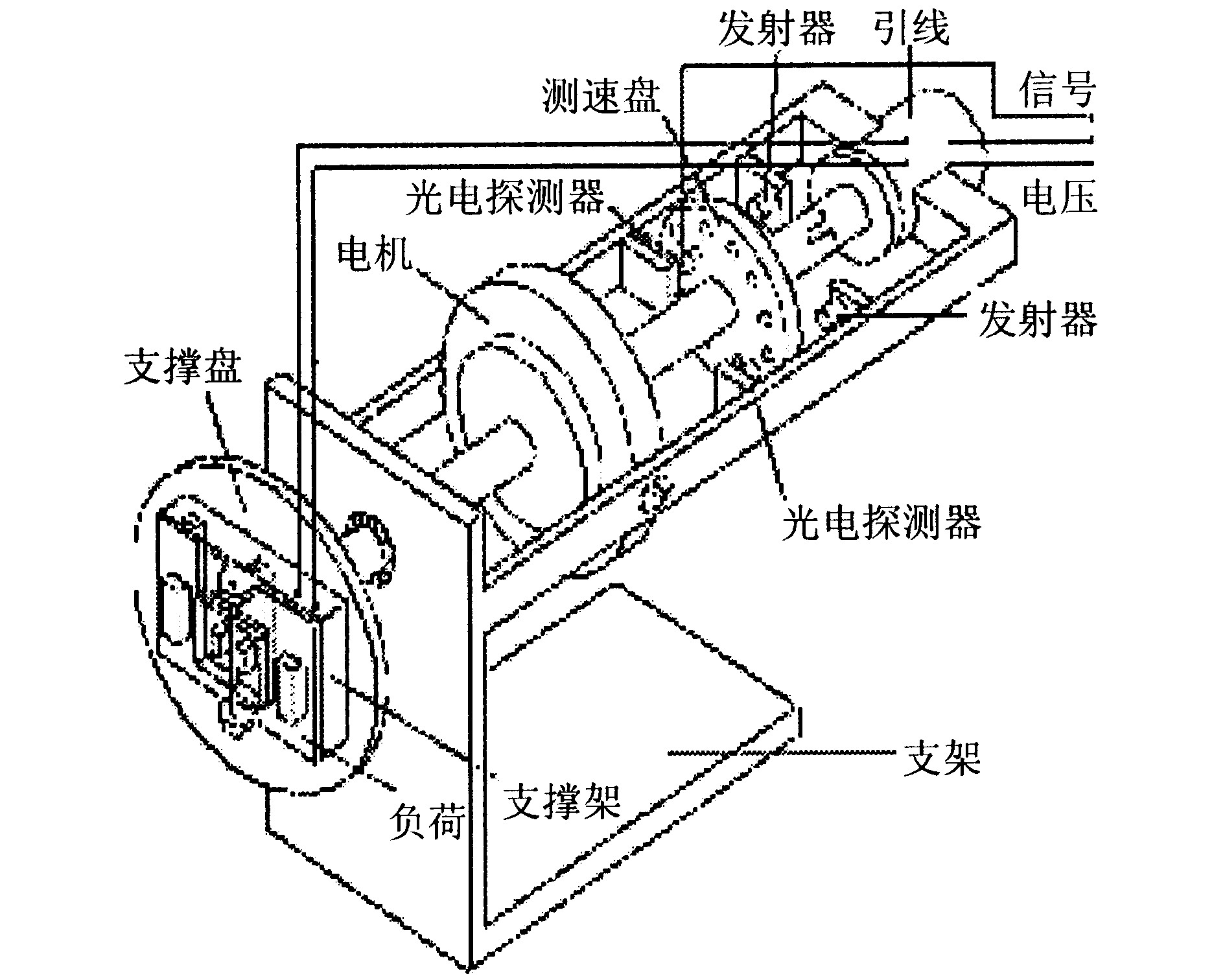
由于该陀螺是利用旋转体自身的驱动力工作, 因此, 检测该陀螺的性能需要有旋转体的仿真器。图8是所述硅微机械陀螺的测试系统框图。图9是旋转体仿真器的结构原理图。
《5.2检测结果》
5.2检测结果
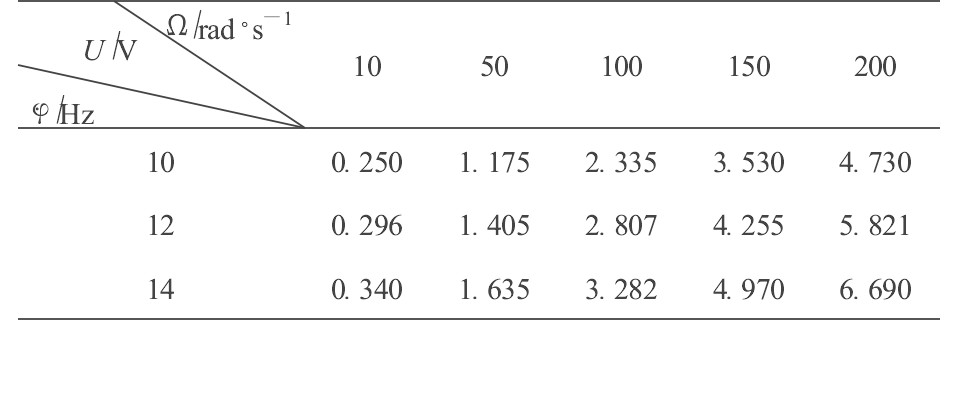
在仿真器不同转速的情况下, 改变转台的转速, 同时记录陀螺相应的输出电压, 在载体不同旋转角速度
表2中的测试数据通过最小二乘法进行线性化运算, 线性拟合直线的形式为
式中K为比例系数, U0为拟合直线的截距。
通过线性拟合运算, 得到如图10所示在
对硅微机械陀螺进行常温性能测试, 得到陀螺的比例系数为
由图10可知, 陀螺输出信号的大小除了和输入角速度Ω有关外, 和载体旋转角速度
《6 结论》
6 结论
1) 利用各向异性刻蚀硅片技术能制作出无驱动结构的硅微机械陀螺, 这种陀螺结构简单, 成本低;
2) 无驱动结构的硅微机械陀螺不仅能敏感载体的俯仰或偏航角速度Ω, 还能同时敏感载体自身的旋转角速度
3) 陀螺的比例系数随旋转速率











 京公网安备 11010502051620号
京公网安备 11010502051620号




