
《一、 前言》
一、 前言
党的二十大报告提出,增加新域新质作战力量比重,加快无人智能作战力量发展。智能无人集群系统是新域新质和无人智能作战力量的重要组成部分,为现代战争克敌制胜赢得先机;也已广泛应用于智能电网、智能物流和自动驾驶等民用领域,助力经济社会发展。世界各国对智能无人集群系统给予高度关注,相继发布了一系列发展规划与政策措施以推动该领域的研究,如美国的《无人系统综合路线图(2017—2042)》、俄罗斯的《2018—2025年国家武器装备计划》、英国的《国防科技框架》、我国的《新一代人工智能发展规划》等[1,2]。
跨域协同是智能无人集群系统形成颠覆性能力的核心技术。与传统智能无人集群系统的单域协同相比,跨域协同拥有优势互补、全方位联动等新技术特点,在大幅提升智能无人集群系统功能的同时,能够不断扩大其应用范围。智能无人集群系统的跨域协同作战逐渐成为新的作战样式[3]。智能无人集群系统的跨域协同指在相同任务目标的驱动下,运行在不同空间域、有显著功能差异的无人系统相互配合,共同完成指定任务[4]。近年来,随着计算机、通信与分布式控制等技术的发展,智能无人系统跨域协同技术的研究和应用取得了突破性进展。在民用领域,智能无人系统跨域协同技术已被应用于地形勘测、安全巡逻、灾难搜索、海洋监管等多个实际场景中;在军事领域,多域战、全域战、分布式作战等作战概念的提出与运用,推动了军种联合作战从简单能力叠加到深度能力融合的转变,使智能无人集群系统跨域协同作战逐渐成为未来战争的基本形态。因此,加强智能无人集群系统跨域协同技术体系研究,充分发挥无人集群系统多域动态互补优势,对服务社会经济发展和保障国家安全具有重要的战略意义。
为深入探析智能无人集群系统跨域协同技术的研究和应用趋势[5],本文系统梳理近年来海空、空地以及海陆 / 海陆空场景下的跨域协同技术,厘清我国智能无人集群系统跨域协同技术的发展现状和需求,研判智能无人集群系统跨域协同技术的未来重点发展方向,提出推动智能无人集群系统跨域协同技术稳健与快速发展的对策建议,以期促进我国无人系统应用能力的持续提升。
《二、 典型无人场景跨域协同技术研究现状》
二、 典型无人场景跨域协同技术研究现状
《(一) 海空智能无人集群系统跨域协同》
(一) 海空智能无人集群系统跨域协同
海空智能无人集群系统跨域协同主要应用于海域警戒巡逻、海洋勘探、目标侦察、协同反潜等海洋作业和联合作战任务中。其中,发展复杂海洋环境下的高可靠、低时延海空平台通信技术是实现海空跨域协同的基础与前提条件;面向动态目标的路径跟踪技术是确保无人集群系统完成目标跟踪等任务的核心技术;利用无人艇(USV)的长续航能力和无人机(UAV)的高机动优势,完成UAV自主着舰是实现海空广域探测、巡逻、补给等联合作战任务的关键环节。目前,关于海空无人集群系统跨域协同技术的研究工作主要围绕海空跨域通信、面向动态目标的路径跟踪和UAV自主着舰开展,具体如下。
《1. 海空跨域通信技术》
1. 海空跨域通信技术
目前,海上通信系统主要有采用高频、超高频等频段通信的岸基通信系统和利用通信卫星作为中继站的海事卫星通信系统。然而,海上电磁传播环境受海水蒸发、海浪波动、海面漂浮物遮挡、昼夜温差大等多种因素影响,海上通信面临着严峻的路径损耗和阴影衰落等问题。此外,海空跨域协同平台存在显著的通信能力差异。上述因素导致海空跨域通信面临传输频率易受扰动、带宽有限和异质通信融合难等问题。因此,海空跨域协同通信需要具备抗干扰、高带宽和低延迟特性,以满足数据实时传输等需求。构建分布式动态拓扑网络,可以基于自组织网络实现UAV和USV之间的跨域通信[6]。此外,已有研究[7]分析了UAV和USV跨域通信中的大尺度、小尺度信道特性,包括路径损耗、阴影衰落和多径衰落等特征。第六代移动通信(6G)技术和卫星技术的发展为海空跨域通信提供了技术支撑。其中,6G技术的应用将实现海空跨域的高速数据传输和低延迟通信。目前,基于异构网络的典型特征,结合使能技术,已有研究[8]提出了一种基于6G的通信网络的“空天地海”一体化网络架构。另外,通过为6G网络引入智能、安全的网络架构[9],可以使跨域组网系统具有动态自适应和服务融合管理等性能。
《2. 面向动态目标的路径跟踪技术》
2. 面向动态目标的路径跟踪技术
目标路径跟踪是智能无人集群系统实现协同对抗或作战任务的基础。在复杂海空对抗作战场景中,充分利用各域无人平台的优势,可以提高全方位监测与跟踪能力,有助于完成对高机动目标的路径跟踪任务。在海空跨域场景中,智能无人集群系统通过形成合适的编队构型,在分布式架构下实现针对动态目标的协同跟踪任务。目前,动态目标路径跟踪技术研究包括:引入三维视线制导法[10],设计适用于异构无人集群系统跟踪预定参数化路径的协同路径跟踪策略;设计鲁棒视觉跟踪控制算法[11],使UAV利用图像的视觉伺服完成跟踪USV的任务;基于模型预测控制方法[12],将UAV-USV协同跟踪问题转化为带约束的二次规划问题,并利用改进希尔得勒斯算法(Hildreth Algorithm)以实现实时协同跟踪任务。此外,神经网络和强化学习等智能化技术具备对复杂模型非线性与环境未知不确定性的处理能力,将其应用于海空跨域协同目标跟踪已成为热点。例如,融合动态表面控制、径向基函数神经网络和事件触发技术,设计鲁棒自适应神经网络协同控制算法,以实现协同路径跟踪[13];设计基于优化能量效率的目标搜索模型,并采用深度强化学习算法来解决目标搜索问题[14];基于目标概率图模型,采用基于近端策略优化的深度强化学习算法以优化USV的运动轨迹[15]。
《3. 海空跨域自主着舰技术》
3. 海空跨域自主着舰技术
UAV具有通信距离远、搜索范围大的优点,USV则具有续航时间长的优势,二者协同可以显著提高海空无人集群系统的任务执行能力和效率。自主着舰技术是实现海空无人集群系统协同的重要环节。自主着舰需要精准导航支持,目前常用的导航技术主要包括卫星导航、惯性导航、视觉导航等[16]。单一的卫星导航如全球定位系统(GPS)、北斗卫星导航系统等无法满足自主着舰的精度要求,惯性导航存在传感器限制及误差累积的问题。比较而言,视觉导航凭借其不依赖传感器且误差不累积的优势,在自主着舰技术中展现出显著的应用潜力。基于此,已有研究通过双视觉协同导航、识别标识码,再复合比例 ‒ 积分 ‒ 微分控制或模型预测控制方法,设计UAV自主着舰策略[17]。随着计算机视觉、深度学习技术的快速发展,基于深度学习的目标检测方法也开始用于自主着舰任务。例如,在视觉定位的基础上,利用双向长短期记忆神经网络来预测USV的姿态变化,以实现UAV对USV姿态变化的实时响应和自主着舰[18];利用视觉检测方法来估算UAV与USV之间的相对位姿以完成UAV着舰任务[19]。
《(二) 空地智能无人集群系统跨域协同》
(二) 空地智能无人集群系统跨域协同
空地智能无人集群系统的跨域协同平台由UAV、无人车(UGV)以及其他地面无人系统组成,其任务包括跨域协同侦察、打击、搜索等。空地智能无人集群系统跨域协同的核心技术主要包括智能导航与定位技术、路径规划技术和空地异构无人系统的协同任务规划与控制技术。智能导航与定位技术是智能无人集群系统在复杂地形和空域环境中实现协同任务的重要支撑技术;路径规划技术旨在为无人系统规划出合适的路径,为后续任务提供基础;空地异构无人系统的协同任务规划与控制技术旨在实现不同类型子系统之间的信息共享、任务分工和联合行动,提高跨域系统的整体效能。接下来,将重点介绍空地智能无人集群系统在导航与定位、路径规划和任务规划与协同控制方面的研究进展。
《1. 导航与定位技术》
1. 导航与定位技术
导航与定位技术是智能无人集群系统进行态势感知的关键支撑技术。若传感器数据误差大、导航与定位精度低,则容易导致态势感知出现偏差,影响协同任务的执行。目前,已有研究进行鲁棒自适应UGV-UAV相对导航定位算法设计,将鲁棒自适应算法与非线性卡尔曼滤波算法相结合,以提高导航精度[20]。此外,地图的准确性直接影响无人集群系统路径规划的效率和态势感知的精度。目前,已有研究包括:通过融合不同类型的传感器数据,设计基于多任务高斯过程分类的异构机器人系统协同融合算法,以主动感知构建地图[21];设计集成目标识别和协作决策功能的双向反馈算法,以实现无人集群系统的协同目标定位[22];引入鲁棒卡尔曼滤波器,设计具有目标检测功能的UGV-UAV鲁棒协同定位算法,以对目标位置的精准估计[23];融合天基卫星星座对地观测技术,以进一步扩大态势感知的范围,提高对目标的定位精度[24]。
《2. 路径规划技术》
2. 路径规划技术
空地协同路径规划技术充分利用UAV与UGV在导航定位、环境感知方面的互相支撑,依据任务驱动的优化指标与约束条件,为搜索救援、物资配送等任务执行平台生成路径。已有研究主要有:利用UAV的高空优势获取广域环境信息,构建环境地图,在此基础上设计UGV-UAV协同路径规划算法,以克服复杂地形环境对UGV路径规划的影响[25];考虑时间窗口、客户需求、最大承载力和配送效益等因素的影响,以配送总成本最低为优化目标进行路径规划,设计空地协同配送路径优化算法[26];在实际应用场景中,路径规划算法需要考虑无人系统的可靠性和任务执行效率,为此,综合UAV的能量、路网状况、空地汇合时间、巡逻任务全覆盖等多种约束,以UAV完成全部巡逻任务的总距离最小为优化目标,设计空地协作巡逻路径规划算法[27];面向地下环境搜索与救援任务,基于UGV配置的多传感器融合对UAV定位并对环境三维建图,设计UAV航点规划算法,在满足搜索任务性能指标的同时,通过评估潜在搜索路线的置信空间以降低UAV定位误差[28]。
《3. 空地异构无人系统协同任务规划及控制》
3. 空地异构无人系统协同任务规划及控制
协同任务规划的重要性体现在对资源的优化、任务效果的最大化以及对复杂环境的适应性等方面,直接影响到整个智能无人集群系统的效能发挥。空地异构无人系统协同任务规划需要处理系统的异构性和复杂性,并满足实时性等要求[29~31]。研究包括:结合标准设计准则的任务规划方法[29],即基于用户目标准则的效益函数来控制优化过程,引入具有精英策略的遗传算法以求解任务规划问题;基于通用部分全局规划算法,利用分层任务表示法来指定子任务之间的相互关系,并设计调度和协调机制,以解决异构系统的任务规划问题[30]。
空地异构无人系统协同控制的主要任务是确保系统编队的稳定性与抗扰动性、任务执行一致性、姿态精确协同性等[32~35]。例如,针对UAV-UGV异构系统在扰动下的时变编队任务,基于一致性理论和内模原理,设计具有分层架构的分布式时变输出编队控制器;利用零空间控制概念,通过控制无人系统的相对姿态,以在实现编队控制任务的同时提升UAV着陆操作的可靠性[33];针对异构无人系统动力学模型未知情形下的编队控制任务,研究基于强化学习技术的最优控制设计[34,35]。
在实际应用场景中,环境干扰、带宽限制以及通信链路故障等因素会导致空地智能无人系统个体之间的信息交互效率低下,致使协同控制算法性能降低甚至导致跨域协同任务失败。围绕通信链路故障和执行器故障情况下空地异构无人系统的编队任务,分布式观测器、强化学习、容错控制等技术被应用于编队控制设计中[36,37]。
《(三) 海陆 / 海陆空智能无人集群系统跨域协》
(三) 海陆 / 海陆空智能无人集群系统跨域协
现阶段国内外对海陆空智能无人集群系统跨域协同的研究相对较少,已有成果主要集中在跨域通信组网、平台互操作性等方面。构建跨域通信网络是实现智能无人集群系统各域信息共享和任务协同的关键。稳健高效的跨域通信网络可以充分利用不同域的通信资源,实现资源的联合调度和优化,减少不必要的冲突和竞争,为智能无人集群系统跨域协同提供信息保障。现有研究通常在海、陆、空三域的基础上融入天域的优势,形成“空天地海”跨域协同通信网络[38]。例如,设计基于椭圆曲线密码的“空天地海”综合通信网络认证方案,通过随机预言模型等安全评估方法以验证方案的安全性[39];设计“空天地海”一体化绿色网络架构,并通过架构、管理功能编排等研究以解决多网络共存和数据网络融合问题[40]。
互操作能够实现不同系统、设备和平台之间的顺畅协作和信息共享,有助于提高整个系统的任务执行效率。近年来,海陆空智能无人系统互操作研究包括:设计由一套消息标准和相关交互协议组成的基于互操作消息的交互框架,以使无人系统之间进行自主协作[41];将作战管理语言应用到USV和UGV中,以在一定程度上弥补远程操作与作战管理语言的差距,使无人系统能够自主执行沿线移动、巡逻和勘测区域等任务[42]。
《三、 智能无人集群系统跨域协同发展现状与需求分析》
三、 智能无人集群系统跨域协同发展现状与需求分析
《(一) 发展现状》
(一) 发展现状
从当前研究现状可以看出,跨域通信、导航与定位、路径规划与跟踪、自主着舰 / 陆、任务规划与异构协同控制等技术在海空跨域和空地跨域协同场景下受到重点关注。相关理论进展与技术应用显著提升了智能无人集群系统的广域感知、实时决策和鲁棒控制能力,并为更好地解决跨域协同任务提供了技术支撑(见图1)。上述技术在应用于执行海空和空地不同跨域场景中的任务时,存在一定的部署差异。① 在跨域通信技术方面,海空跨域通信易受海浪、大气湍流、天气变化等因素影响;而空地跨域通信更容易受到地形、建筑物和植被等地面因素的影响。② 在导航与定位技术方面,海空跨域导航与定位技术需要整合水声、雷达、视觉和空中无人平台搭载的传感器所获取的信息进行精准导航与定位;空地跨域导航与定位技术更需要考虑地形、建筑物等陆地因素的影响,并能适应环境的动态变化。③ 在路径规划与跟踪技术方面,海空跨域路径规划需要考虑水面和空中动 / 静态障碍物、动态海况、气象因素,而路径跟踪则要应对水面波动、风流湍流等带来的影响;陆空跨域路径规划需关注复杂地形、建筑物等因素,而路径跟踪则要适应高动态、不确定性环境,强调实时调整路径以规避动态障碍物。④ 在自主着舰与着陆技术方面,海空智能无人集群系统需要考虑水面波浪等海洋环境因素;空地智能无人集群系统则更关注处理地面上的动态环境因素,如建筑物、道路、人流等。⑤ 在异构协同控制技术方面,海空智能无人集群系统需要综合水下、水面和空中不同无人平台,涉及自主着舰控制等多种技术;空地智能无人集群系统更专注于整合地面和空中平台,相应的协同控制算法设计需要主要考虑地形复杂性等因素。
《图1》
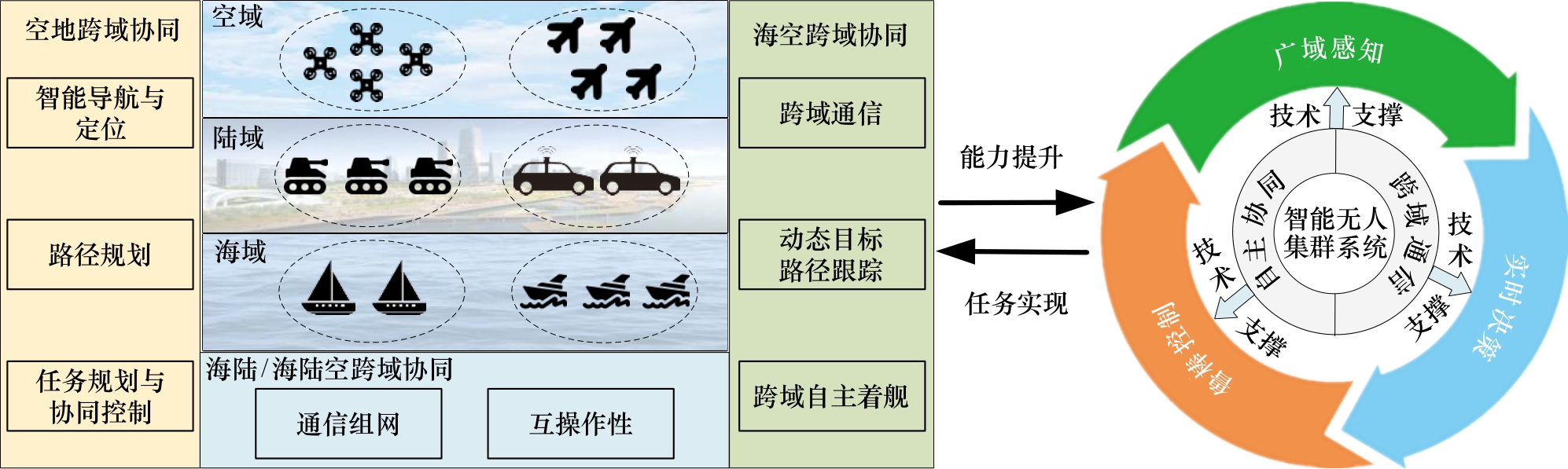
图1 智能无人集群系统跨域协同技术架构
近年来,多域战、全域战、分布式作战、马赛克战等一系列跨域协同作战的概念场景在世界局部冲突和战争中屡见不鲜,印证着未来战场将扩展到海、陆、空等多个领域。海陆空跨域协同是在海陆无人系统跨域协同的基础上,融入空域协同平台,依托各类UAV、USV、无人潜航器(UUV)与UGV、地面无人平台的协同,综合利用非对称优势,瘫痪敌方作战体系,掌握战场主动权,提升作战效能。此外,“空天地海”跨域协同作战是未来无人系统作战的发展趋势。当前,关于海陆空、“空天地海”跨域协同的研究主要聚焦于高可靠通信、异构平台的互操作性等方面,进一步实现智能无人集群系统跨域协同仍是世界各国亟待解决的技术难点。
《(二) 需求分析》
(二) 需求分析
为实现分布在天、临近空间、空、地、海、深海等多域无人系统的高效协同,最大化智能无人集群系统的效能,需要在跨域协同框架下进一步提升无人系统在跨域通信、广域感知、任务规划和异构无人系统协同控制等方面的能力。其中,先进的融合组网通信技术是无人系统实现高效跨域通信的核心技术之一,能够使协同的无人系统实现通信资源的优化利用,确保高效稳定的跨域通信;多源信息融合感知技术是提升无人系统广域感知能力的重要技术手段,不仅能够感知环境中的静态因素,更能够有效整合多种传感器信息,敏锐洞察环境中的动态因素;跨域协同决策与异构无人系统协同控制可以将系统运行能力提升至智能层面,通过动态编组实现对复杂场景的高效响应。针对于此,下面将深入分析这些关键技术的实现需求,以明确智能无人集群系统实现高效跨域协同的技术支撑。
① 融合通信组网需要开发前沿的通信技术,包括在临近空间域部署飞艇、气球等无人平台以构建高带宽、低时延的通信网络,实现自适应组网结构,确保不同无人系统之间能够在天、临空、地、海等各域进行稳定高效通信,建立完备的通信基础设施。② 多源信息融合感知需要无人系统具备多模态感知能力,可以集成来自不同传感器的多源信息,并通过先进的数据融合算法实现对多源信息的有效整合、处理与分析,提高广域动态环境感知的准确性。③ 跨域协同决策需要开发智能决策算法,结合智能辅助决策与动态编组等技术,考虑系统之间的相互影响和约束,实现不同系统之间的协同决策,并能在复杂动态场景中进行实时弹性决策,提高无人集群系统跨域协同效能。④ 异构协同控制需要设计灵活、智能的协同控制算法,结合实时反馈与调整机制,实现动力学模型的统一与适配,实现对跨域无人集群系统的高效控制,确保系统协同运作的互操作性与灵活性。
《四、 智能无人集群系统跨域协同的重点研究方向》
四、 智能无人集群系统跨域协同的重点研究方向
近年来,关于智能无人集群系统跨域通信、态势感知、协同控制与智能决策等方面的研究不断增多;然而,相关研究多聚焦于智能无人集群系统单域协同场景,在跨域协同场景下,如何对获取的复杂差异信息进行有效融合分析,进而实现智能无人集群系统的跨域协同决策与控制,是亟需解决的难点问题。
《(一) 复杂跨域场景下的信息感知与融合》
(一) 复杂跨域场景下的信息感知与融合
信息感知与融合通常指将不同场景下收集到的信息经过一定的处理和分析,以一种一致、可比较的方式进行融合表征,目的是使不同场景下的信息可以进行有效的融合分析并用于决策与控制。信息感知与融合是高效利用跨域场景信息的前提,也是实施协同控制与智能决策的基础;是智能无人集群系统发挥功能必须具备的技术之一,也是亟需解决的技术难点之一。在跨域场景下,由于场景覆盖广、环境差异大、态势演进快,不同域间信息传输复杂且易受干扰,导致复杂跨域场景下的信息感知与融合面临严峻挑战。
《(二) 多域耦合约束下的弹性决策》
(二) 多域耦合约束下的弹性决策
在跨域场景下,智能无人集群系统协同面临多种互相影响的约束和限制条件,如所处的环境约束、所需完成的任务约束、各域平台之间的耦合作用约束等。一方面,这些约束条件可能为宏观的全局性约束,如任务目标、时敏任务的完成时间等;另一方面,也可能为微观的局部性约束,如各域的局部环境约束等。在面对多个相互影响、相互制约且约束信息不同、维度不同、重要性不同的约束条件时,智能无人集群系统应以灵活、弹性的方法作出快速决策,合理权衡信息,应对不同场景和任务需求的变化。这不仅要满足基本的约束条件,还要具备一定的弹性决策能力以应对场景的动态变化。因此,如何在复杂约束环境下作出弹性决策,将成为多域耦合约束下智能无人集群系统协同的重点研究方向之一。
《(三) 具有强异质动力学特性的协同控制》
(三) 具有强异质动力学特性的协同控制
在跨域场景下,不同无人平台之间存在显著差异,涉及不同平台中无人系统的固有动力学特性、机械结构、传感器配置、控制方式以及不同环境因素对无人系统干扰影响机理等方面的差别。这些因素导致不同无人平台在运动学和动力学方面呈现强异质特性。在具有强异质动力学特性的跨域平台中,智能无人集群系统的协同控制需要考虑各个平台的异质动力学与运动学特性以及不同的环境和任务约束,制定适用于不同平台与环境的控制策略,以确保整个系统能协同工作并优化性能。为此,亟需开发新的跨域协同控制技术,以克服强异质动力学特性对协同行为的影响,并为不同平台之间的高效协同提供支持。
《(四) 融合临近空间无人平台的跨域协同》
(四) 融合临近空间无人平台的跨域协同
临近空间指距地面20~100 km的空域,介于飞机最高飞行高度与空间轨道飞行器最低飞行高度之间,是“空”和“天”的纽带。在临近空间部署飞艇、气球等无人平台可以实现“空天地”信息的有效中继和衔接,形成“天临空地海”一体化网络,为未来实施空天一体联合作战提供信息优势。根据飞行速度可将临近空间无人平台分为低速和高速两种。低速临近空间无人平台包括平流层飞艇、高空气球等,具有视野广阔、驻空持久、效费比高、隐蔽性好等优点,可搭载不同载荷用于通信中继、提升态势感知能力、实现电磁压制和打击。高速临近空间无人平台包括空天轰炸机、高超声速飞行器等,具有高飞行速度和大载荷能力,用于快速侦察和精准突防。目前,针对临近空间无人平台的研究主要集中在飞行器装备技术的研发,对其协同作业的研究并不多见。充分发挥临近空间无人平台的独特环境和物理优势,与空域、天域无缝衔接,进而提高跨域协同能力是未来的重点研究方向。
《(五) “空天地海”智能无人集群系统跨域协同》
(五) “空天地海”智能无人集群系统跨域协同
“空天地海”智能无人集群系统跨域协同是一种综合利用多域无人平台资源,实现复杂协同任务的技术。其中,跨域通信组网是“空天地海”智能无人集群系统跨域协同的信息基础。跨域通信组网具有多层次、多维度动态时变等特征,且网络拓扑具有结构复杂、动态连通、规模可扩展等特点,未来研究需要重点关注:设计可弹性重构、高效多维的网络架构,开发高效统一的传输方案等。此外,“空天地海”智能无人集群系统跨域协同面临无人集群种类多样、环境复杂多变、不同域资源分配约束不同以及实时性要求高等挑战。因此,在构建跨域通信网络的基础上,应提高无人集群系统的智能决策与智能规划能力,优化协同算法,解决多域、多任务情况下跨域协同涉及的资源分配与任务规划问题,实现“空天地海”智能无人集群系统跨域协同。
《五、 智能无人集群系统跨域协同技术发展建议》
五、 智能无人集群系统跨域协同技术发展建议
《(一) 总体思路上,做好顶层设计,坚持战略需求引领整体发展,积极开展跨域协同技术标准化制定工作》
(一) 总体思路上,做好顶层设计,坚持战略需求引领整体发展,积极开展跨域协同技术标准化制定工作
智能无人集群系统跨域协同技术能够实现不同类型、不同任务无人系统之间的信息交换和任务协同。然而,这一技术在实际应用中,还存在一些挑战和难点,如通信协议不兼容、时延和数据传输不稳定等问题。针对于此,需做好顶层设计,坚持战略需求引领未来发展,针对智能无人集群系统跨域协同技术的特点和需求,研究并制定标准化协议,确保不同类型、不同任务的无人系统之间可以进行有效的信息交换和任务协同;制定智能无人集群系统跨域协同技术整体发展路线图,厘清阶段性攻关任务,科学推动智能无人集群系统跨域协同技术的持续发展。
《(二) 体系架构上,构建可扩展性高、鲁棒性强的开放式体系架构,重视信息安全与安全控制技术、人工智能技术与跨域协同技术的融合发展》
(二) 体系架构上,构建可扩展性高、鲁棒性强的开放式体系架构,重视信息安全与安全控制技术、人工智能技术与跨域协同技术的融合发展
聚焦我国智能无人集群系统跨域协同技术的战略需求,深入开展智能无人集群系统跨域协同技术体系研究,构建并完善具有我国特色的智能无人集群系统跨域协同技术体系。由于无人系统种类繁多,跨域协同体系需容纳各种类型的无人系统,构建可扩展性高、鲁棒性强的开放式体系架构,为此,需设计开放式的架构与接口,使不同类型的无人系统可以方便地加入到跨域协同体系中,实现互操作和相互支持。无人集群系统跨域协同体系的发展需要考虑安全和隐私保护,确保通信和数据传输的安全性,防止信息泄露和抵御恶意攻击。智能无人集群系统跨域协同体系的发展需要注重人机协同与人工智能技术的融合,其中无人系统与人类操作员之间的协同配合是实现跨域协同的关键。人工智能技术可以提供智能决策和自主行为,而人类操作员则能够提供更高层次的指导和监控。因此,将人机协同和人工智能技术进行有效结合,是完善无人集群系统跨域协同体系的重要途径。
《(三) 理论创新上,聚焦动态切换拓扑下异质智能无人集群系统跨域任务分配、协同控制等科学问题,开展理论研究工作》
(三) 理论创新上,聚焦动态切换拓扑下异质智能无人集群系统跨域任务分配、协同控制等科学问题,开展理论研究工作
坚持自主理论创新与国际合作交流相结合的方式,聚焦关键科学问题开展理论研究,为智能无人集群系统跨域协同技术突破提供理论指导。跨域协同技术的研究需考虑不同领域无人集群系统之间的任务分配和协调。在多个系统协同工作时,合理分配任务,并确保各个系统之间能够协调一致地执行任务,是一个关键科学问题;需要设计智能化的任务分配算法和协调机制,根据实际情况动态调整任务分配和协调策略。在复杂跨域场景下,无人集群系统的通信拓扑大多呈现动态切换特性,在系统动力学上呈现出强异质特性且存在未知动力学,亟需从代数图论、切换系统理论、稳定性理论与智能控制理论中发展新的分析方法与控制技术,以解决动态切换拓扑下异质智能无人集群系统跨域协同控制等科学问题。
《(四) 技术攻关上,围绕体系架构与装备发展需求,以理论创新为基础坚持自主技术创新,突破智能无人集群系统跨域协同技术瓶颈》
(四) 技术攻关上,围绕体系架构与装备发展需求,以理论创新为基础坚持自主技术创新,突破智能无人集群系统跨域协同技术瓶颈
聚焦设计通用的接口和协议标准,推动不同领域的智能无人集群系统间的数据交换和共享,具体包括定义数据格式、通信协议和传输机制等方面的技术攻关工作。开发新型任务分配算法和协调机制,使不同领域的无人系统能够高效地分配任务并协同工作,涉及智能化的任务分配算法、协同决策和性能优化等方面的技术攻关。聚焦智能决策与协同控制技术攻关,通过引入人工智能技术,使无人系统能够自主进行决策和协同控制,涉及运用机器学习、深度学习和强化学习等技术来训练模型和优化算法,以实现智能化的跨域协同决策与控制。此外,注重发展智能无人集群系统跨域协同中的安全与隐私保护技术,涉及数据加密、身份认证、访问控制等安全机制的设计和实现,以及隐私保护策略和技术的开发等。围绕建立跨域协同系统的仿真平台和测试环境开展技术攻关,支持对系统进行验证和性能评估,具体涉及模型构建、场景设定、仿真算法实现和评估指标设定等方面的工作。
《六、 结语》
六、 结语
智能无人集群系统跨域协同技术研究在推动无人系统技术的深入发展和工程应用中具有重要价值。本文对智能无人集群系统跨域协同的研究进展进行了综述与分析,尤其对近年来国内外关于智能无人集群系统跨域协同的研究现状进行了深入分析,梳理了智能无人集群系统跨域协同研究中面临的难点问题,进一步提出了推动该技术稳健与快速发展的对策建议,以期促进我国无人系统的持续发展。
未来,在多域战、全域战、分布式作战等背景下,“空天地海”跨域智能无人集群系统具备执行多种作战任务的潜力,特别是在高风险和高对抗环境下,通过跨域协同可以显著提升作战效率,最大程度地减少或避免作战人员伤亡,具有重要的军事意义。在民用领域,“空天地海”跨域智能无人集群系统协同技术将为无人驾驶、智能仓储与物流、智慧城市建设等提供重要技术支撑,对经济社会发展具有重要意义。
利益冲突声明
本文作者在此声明彼此之间不存在任何利益冲突或财务冲突。
Received date:December 8, 2023;Revised date:December 28, 2023
Corresponding author: Jiang Bitao is a research fellow from SatelliteInformation Intelligent Processing and Application Research Laboratory,and a member of Chinese Academy of Engineering. Her major researchfield is space remote sensing. E-mail: jiangbitao@bjirs.org.cn
Funding project:Chinese Academy of Engineering project “Study onCollective Intelligence Technology Systems of Cross-Domain UnmannedSystems” (2023-HY-15)











 京公网安备 11010502051620号
京公网安备 11010502051620号




